
Abstract
Because of the high complexity in microstructure evolution in friction stir welding, it becomes very difficult to design optimal welding parameters. To solve this problem, in the current paper, soft computing based data driven models are developed to provide accurate and instant predictions for the welding process, and a multiobjective optimisation approach is employed to find optimal solutions to achieve the desired quality and economic objectives. The current work studies the aluminium AA5083-O as an example, where not only weld quality and mechanical properties of a joint but also in process properties and production cost are considered as objectives in the optimal design.
Introduction
Friction stir welding (FSW) has been shown to be a very practical joining technique for various industrial problems in aerospace, railway, shipbuilding, etc. A general FSW process involves severe plastic deformation in a high temperature environment and produces good microstructural and mechanical properties for the post-weld materials. From the viewpoint of application, it is essential to generate predictive models for internal process features and as weld properties, and then utilise them to design effective welding conditions to produce structurally sound, defect free and low cost welds. The conventional approach of designing welding conditions is often a time consuming trial and error process and is almost impossible to find the ‘optimal’ solutions. The high complexity of FSW, caused by the complex thermomechanical processes and intense plastic deformation, makes the design even more difficult. In order to achieve the optimal design of welding parameters in a fast, accurate and cost effective way, one may employ the soft computing techniques into the relevant empirical modelling and optimisation procedures.
In recent years, multiobjective optimisation algorithms based on soft computing principles have been gradually applied into materials and manufacturing processes.1–5 In the review article, Tutum and Hattel 6 have foreseen a bright perspective of implementing soft computing based optimisation approaches into the FSW design and suggested some practical directions for the future research. However, only few works have been carried out in this area. Tansel et al. 7 employed a genetic algorithm to find the best operating conditions from the developed artificial neural network models. In Roshan et al.'s paper, 8 a neuro-fuzzy system was applied for predicting the mechanical properties of the aluminium AA7075, and a simulated annealing algorithm was further used to exploit the models to achieve optimal characteristics. Parida and Pal 9 proposed a fuzzy assisted Taguchi approach to optimise multiple process parameters of FSW, in which the multiobjective optimisation problem was strategically converted into an equivalent single objective optimisation case. In the studies,10, 11 a multiobjective genetic algorithm NSGA-II was used into thermal models to solve two-objective optimisation problems, i.e. minimising the peak residual stress in a weld and maximising welding speed simultaneously, 10 and maximising tool life and production efficiency simultaneously. 11 In Shojaeefard et al.'s paper, 12 the authors used the multiobjective particle swarm optimisation (MOPSO) to find the process conditions to reach the optimal design of mechanical properties. The above researches considered either single-objective7–9 or two-objective10–12 optimal designs. In this paper, more than two conflicting optimisation objectives are taken into consideration, which include not only mechanical properties but also weld quality, in process attributes and economic cost of welding.
Experimental
In this work, the study focuses on a frequently used non-heat treatable aluminium alloy AA5083-O, which possesses high strength, good formability and excellent resistance to corrosion. 13 In the experiments, the 5.8 mm thick AA5083-O plates were welded as butt welds. A well designed second-generation tool MX-Triflute, in conjunction with a 25 mm diameter scroll shoulder, 14 was used in welding. Such an FSW tool has been proven to be very successful, as it improves the material flow, thereby enabling a significant increase of the maximum achievable welding speed. 15
Two attributes used for the control of FSW are the tool rotation speed (rev min− 1) and the forward movement step along the joint line (representing welding speed) (mm rev− 1). All the experimental trials were undertaken based on a 5 by 5 parameter test matrix, which includes five levels of tool rotation speeds, i.e. 280, 355, 430, 505 and 580 rev min− 1, and five levels of forward feedrates, i.e. 0.6, 0.8, 1.0, 1.2 and 1.4 mm rev− 1.
A new revolutionary on-line sensory platform named Advanced Rotating Tool Environment Monitoring and Information System (Artemis), which is a rotating tool holder that is extensively instrumented, was developed by TWI. It can in process collect and log data relating to the internal status of welding, as shown in Fig. 1, including various temperatures of different parts, such as the tool temperature and the shaft temperature, torque and various forces on the tool, such as the axial compression, the lateral bending force and the traverse force.
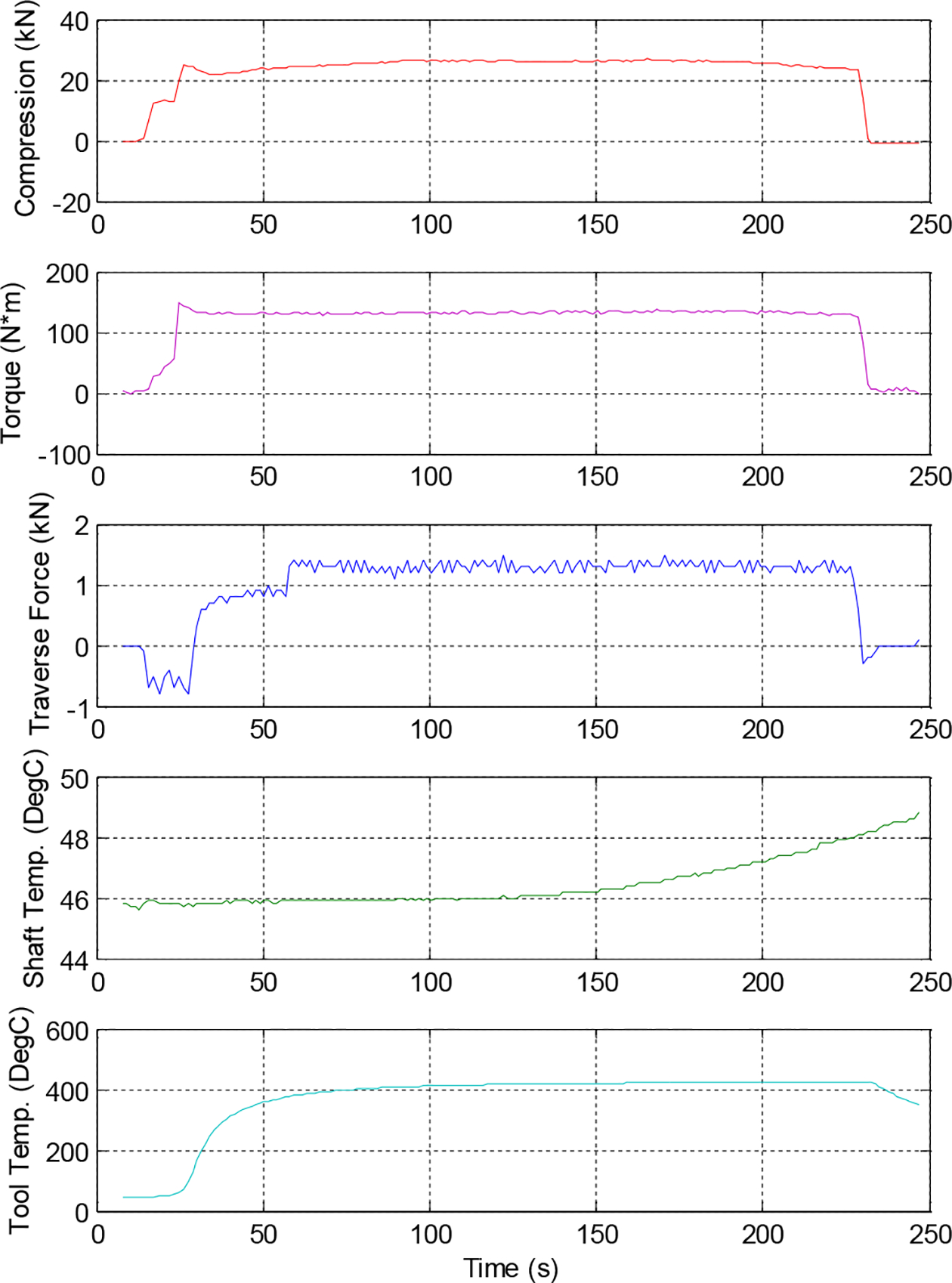
Some internal process variables recorded by Artemis sensory platform: example when rotational velocity is 355 rev min− 1 and feedrate is 0.8 mm rev− 1
For all the welds, tensile tests were accomplished at the room temperature, from which elongation, reduction of area, yield strength and ultimate tensile strength were derived. They utilised the digital image correlation (DIC) technique, a LaVision two-dimensional (2-D) system with a monochrome camera of 2 megapixel, to measure displacement and collect data. For every set of welding conditions, five separate specimens in two geometries were produced and tested. They were all machined in the transverse direction. In such transverse tensile tests, the measured strength relates to the weakest area of the weld, while the obtained ductility represents the mean situation across different zones. Two types of failure in these tensile tests can be observed, as shown in Fig. 2. The first is a shear fracture that occurred in the heat affected zone, which has a lower strength because of the generation of heavily coarsened precipitates and non-precipitate regions. 16 For those joints including defects, the second type of failure happened in the nugget region, where voids had formed.
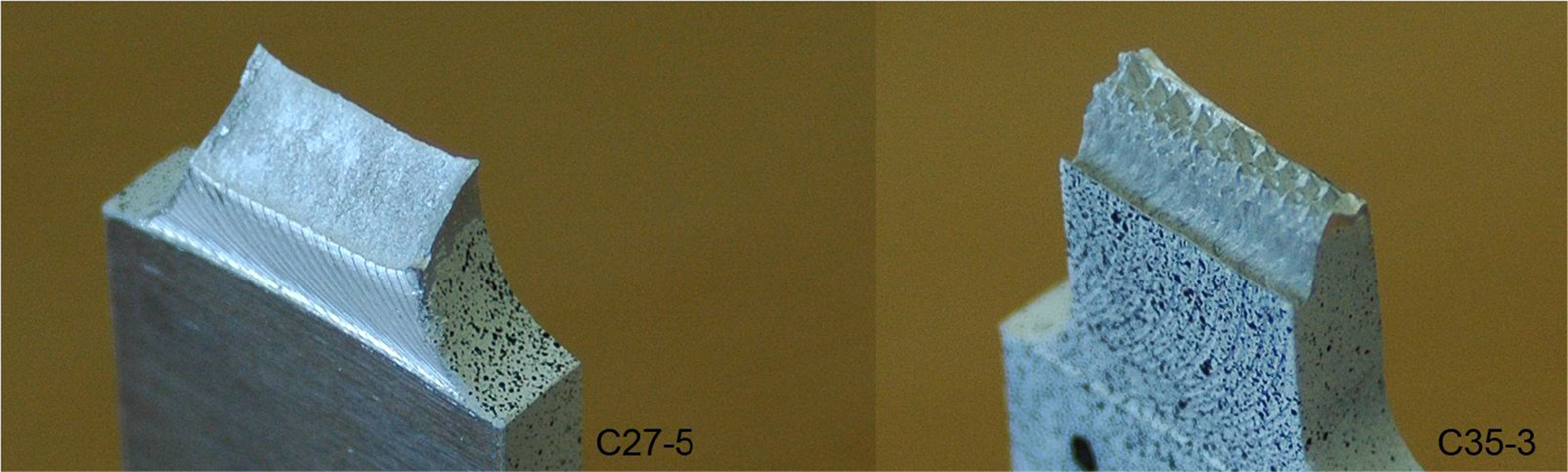
Comparison between shear fractures occurred in heat affected zone and those occurred in nugget zone
For a friction stirred weld, the general defects are flow related volumetric defects, 17 where materials are not stirred and mixed adequately. In details, when the tool is rotating and gradually moving forward, the material softened around the tool pin will be forced to transfer from the advancing side to the retreating side along the front path of the tool; therefore, a void will occur at the advancing side. If the material flow coming back from the retreating side along the back of the tool cannot fill the vacated area fully and instantaneously, the volumetric defects will happen. 18
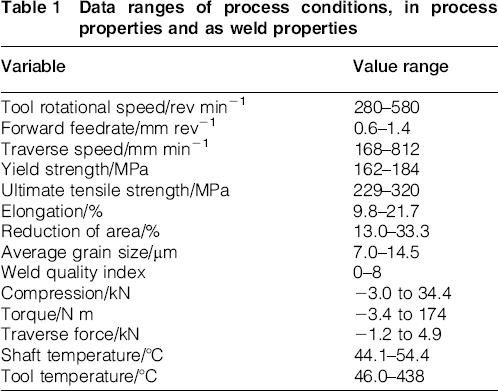
To evaluate the weld quality, four separate tests were carried out, i.e. a surface inspection, a cross-section inspection, a surface bend test and a root bend test. For each single test, a sub-index with a value ranging from 0 to 3 is used to express the weld quality degree. In order to represent the overall status of weld quality, four sub-indices are summed together to form an integral weld quality index with its value ranging from 0 to 12, where 0 means excellent quality and 12 means complete failure in welding. The data ranges of welding parameters, internal process variables, mechanical properties and weld quality index are summarised in Table 1.
Data ranges of process conditions, in process properties and as weld properties
Cost of production
Generally, the cost of welding a piece of materials using FSW consists of four main parts as follows:

The labour cost is expressed as follows:

The cost relating to tool wear can be expressed as follows:

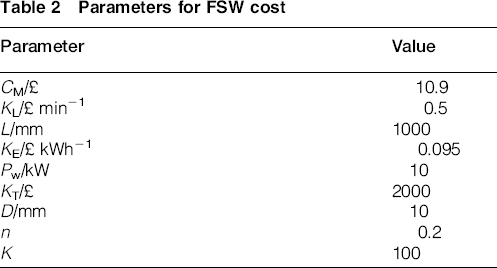
Therefore, the overall unit cost is expressed in the following form:

Parameters for FSW cost
Predictive models
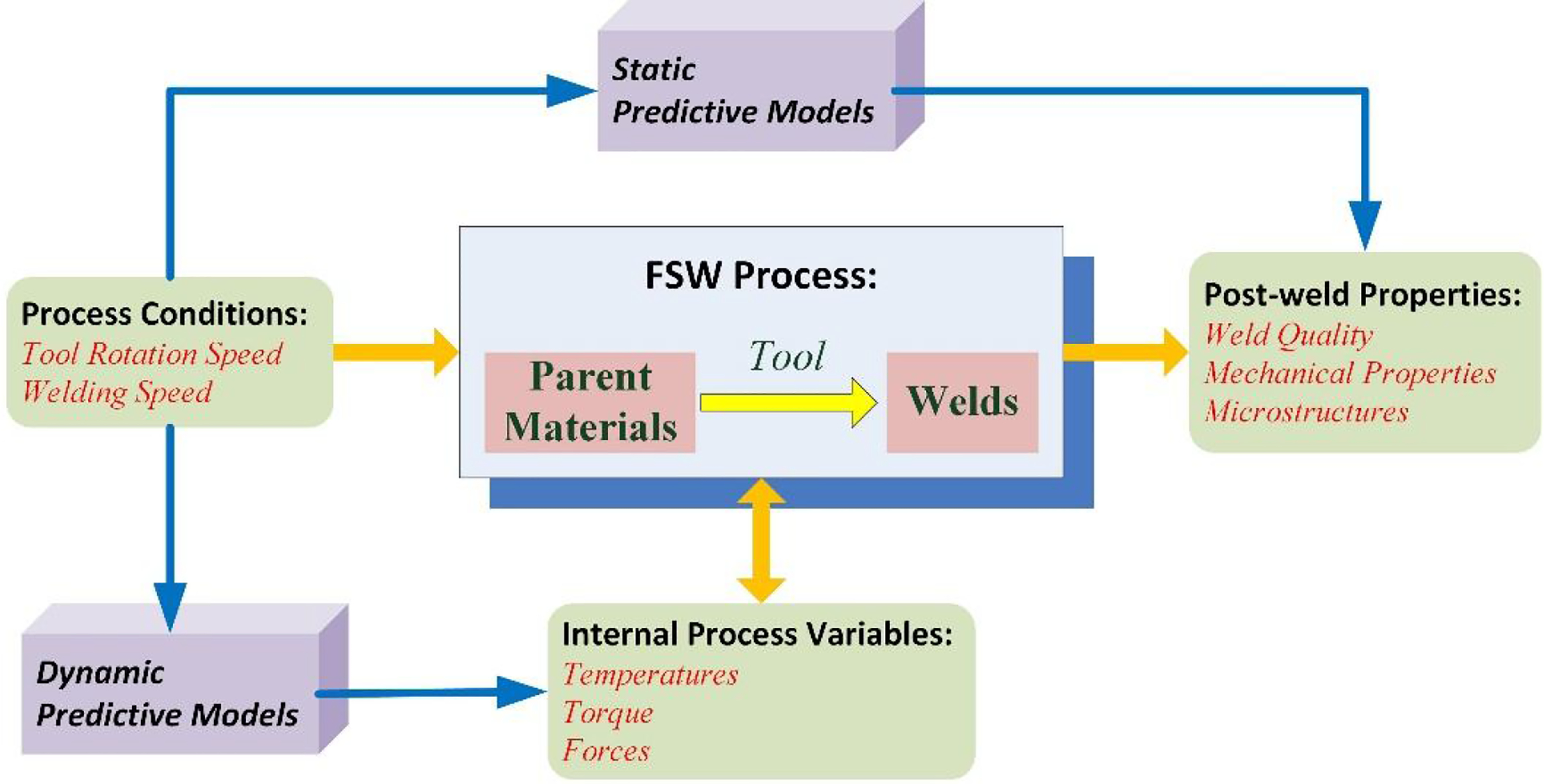
Figure 3 illustrates different groups of attributes in the FSW process, i.e. process conditions, in process variables and post-weld properties. Both of the internal and post-weld properties are important, as the former can provide rich but sometimes hidden information about the undergoing process and the latter represent the quality of the final product. Owing to the severe plastic deformation and the complex recrystallisation phenomena in FSW, it is very complicated and difficult to derive suitable analytical models to predict these properties.
Essential properties and developed models for FSW
The previous study20, 21 has successfully employed the data driven modelling techniques to construct a number of reliable predictive models for various post-weld properties, relating to microstructure, weld quality and mechanical properties. The modelling method was designed based on fuzzy rule based systems,22, 23 which are very practical to be applied into the nonlinear, data driven leaning context. An improved version of the data driven fuzzy modelling approach, with a representative data selection method, was further implemented to develop dynamic models for predicting internal process attributes, 24 as demonstrated in Fig. 3. Such dynamic models can predict the internal process features at various time points during the whole welding process. Figure 4a demonstrates the prediction performance of one elicited traverse force model (with 100 fuzzy rules, RMSE = 0.2501 and correlation coefficient r = 0.9820). Figure 4b demonstrates its validation in the real time application, where the model is successfully used to predict the changing of the traverse force during welding for a certain set of welding conditions. Such models are considered to be robust, as they always provide moderate predictions and neglect the disturbances and noises involved in the learning examples.
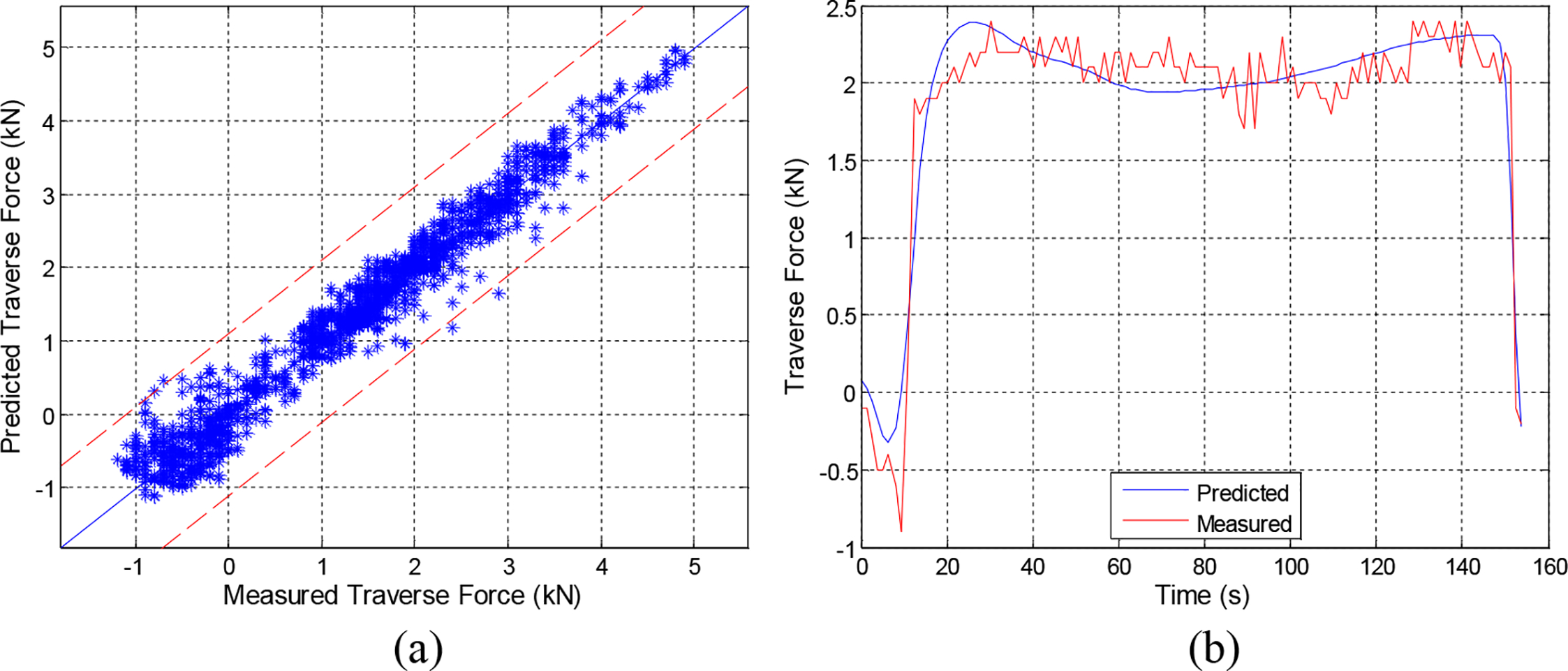
a predicted traverse force versus measured traverse force; b example of dynamic prediction using traverse force model: tool rotational velocity 505 rev min− 1 and feedrate 404 mm min− 1
Multiobjective optimal design
The optimal design of the welding process is naturally a multiobjective problem, in which the desired objectives can conflict with each other, for example, strength and ductility may be a pair of conflicting objectives, and weld quality and production cost may also conflict as objectives. In this study, we employed a novel nature inspired algorithm, i.e. the multiobjective reduced space searching optimisation (MO-RSSA).25, 26 It is an optimisation and search technique motivated by the human behaviour of searching for the best solution in their daily life. Normally, if one seeks for a target without any preliminary knowledge, common sense leads to scan a relatively large area initially; should one obtains some clues indicating the suspicious areas, the search region is then justifiably decreased for more complete inspection. Conversely, if one appears to be trapped in a worthless space, then the field of vision should be expanded to look for fresh clues. Based on this idea, a simple operator RSSA was designed that can shift the search space and change its scale.
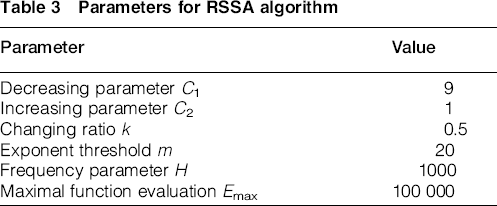
To extend the algorithm to cope with multiobjective instances, the varying weighted aggregation strategy 27 was employed and an extra archive was designed to record the observed Pareto optimal solutions. Most of the recent multiobjective optimisation algorithms were designed based on the Pareto dominance population, which generally possess well distributed solutions. However, some research showed that the Pareto dominance based algorithm may find difficulties when dealing with the problems with a large number of objectives. The presence of all non-dominated solutions in the population may ease the selection pressure and cannot push the population enough towards the optimal region. 28 The varying weighted aggregation based algorithm is relatively straightforward and computationally efficient. It enables the solutions to quickly converge to the relatively ‘good’ searching areas and also appears very practical in finding the ‘knee’ region 29 out of a Pareto front. The algorithm MO-RSSA has been tested using some challenging benchmark testing problems, ZDT series and DTLZ series problems, and shown to perform better than some well known algorithms, such as SPEA2 and NSGA-II. 26 For the experiments in the following section, the parameter configuration was set as shown in Table 3 without any loss of generality. The experimental results show that these parameter settings are robust and work well across all the experiments.
Parameters for RSSA algorithm
Results and discussion
Figure 5 illustrates the framework of the multiobjective optimal design for FSW. For every single case of the following experiments, 10 runs were carried out and the set of results in an ‘average’ performance are shown and discussed as examples. It is found that the results in different runs are very consistent.
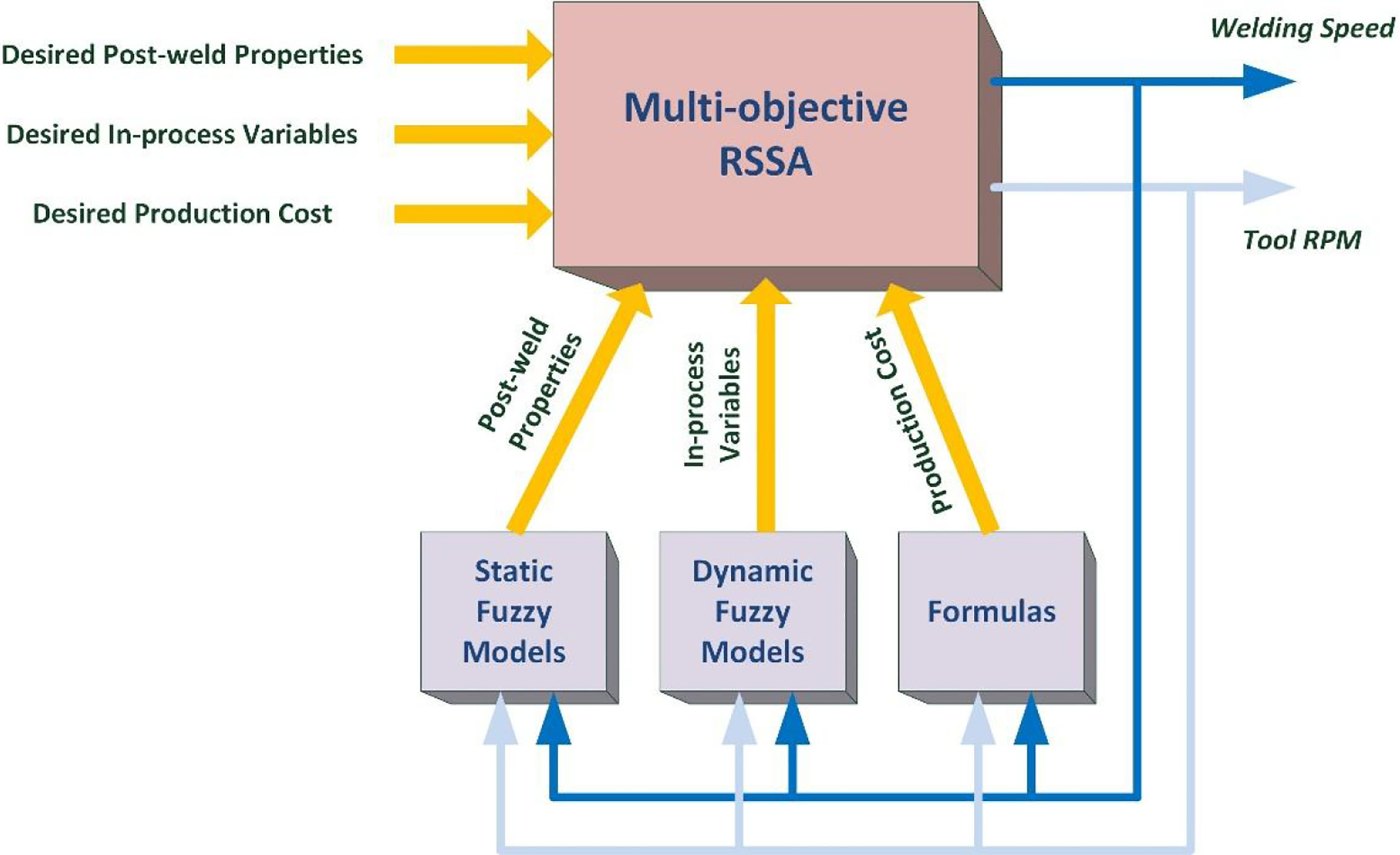
Framework of multiobjective optimal design for FSW
In the first experiment, we aim to maximise the mechanical property, yield strength and the weld quality. The objective functions used into the optimisation algorithm can be defined as follows:


Figure 6a shows one group of the multiobjective optimal solutions in a two-objective plane. To show more details, 10 solutions out of the whole solution set are selected and listed in Table 4. The results are shown to be of low tool rotation speeds and relatively high forward feedrates. Such observation accords with the general recrystallisation principles, 30 as the low heat input, caused by a low rotation speed and a high forward feed speed, leads to the generation of fine grains, which always relates to high yield strength. However, the high forward feedrate will also worsen the weld quality, as the void defect may form due to the insufficient material flow. In application, one may choose the welding conditions close to 280 rev min− 1 tool rotational speed and 1.3 mm rev− 1 feedrate, which guarantees an excellent weld quality and a relatively strong yield strength, 181 MPa out of the range of 162–184 MPa.
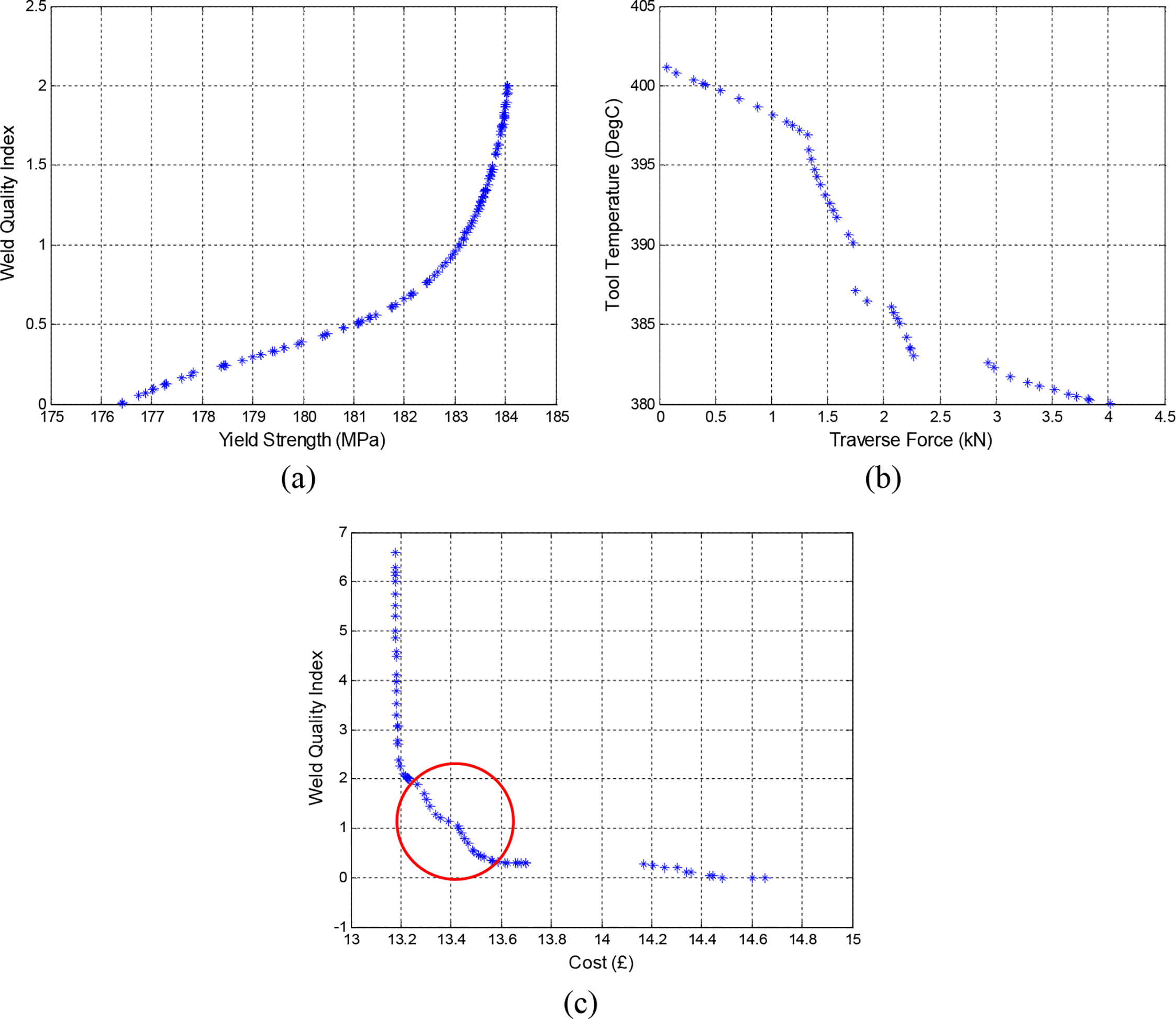
Pareto optimal solutions of two-objective optimal design problems: a yield strength and weld quality; b traverse force and tool temperature; c production cost and weld quality
Ten examples of obtained solutions for first two-objective design problem

In the second experiment, the traverse force and tool temperature profile during the welding process were considered as objectives, where one would like to minimise the traverse force to avoid tool breakage and maintain the tool temperature at a certain level to achieve the desired microstructure. In this case, the objective functions can be designed as follows:


Figure 6b shows the optimal solutions in their objective space. For details, 10 out of all are chosen and shown in Table 5. From the table, it can be observed that a faster welding speed (the product of the tool rotation speed and the forward feedrate) brings higher traverse resistance but lower tool temperature, because a faster welding speed decreases the welding time and thus decreases the heat generation. For the practitioners who prioritise to protect the tool, they can utilise a solution with a low tool rotational speed (280–300 rev min− 1) and a high forward feedrate (1.2–1.4 mm rev− 1). Such a solution will ease the pressure on the tool to avoid the unexpected breakage and extend the tool life, and at the same time, it leads to a tool temperature (∼395°C) that is close to the target one (380°C).
Ten examples of obtained solutions for second two-objective design problem

The third design problem aims to simultaneously minimise the cost of production and weld quality. The objective functions are defined as follows:


Figure 6c includes the obtained non-dominated solutions, and 10 of them are chosen as examples to show in Table 6. The solutions with the lowest cost of production are those implementing high welding speed (high tool rotational speed and high forward feedrate), which can greatly shorten the welding time for a single joint, and therefore reduce the labour cost and energy cost. Although the tool wear cost is increased a little by an increasing welding speed, it is only a minor factor if compared with the labour cost and energy cost. For the FSW of the aluminium, one tool can last for thousands of meters of welding. However, fast welding speed often causes the formulation of void flaws due to the insufficient material flow. In Fig. 6c, one can observe a ‘knee’ region in the Pareto front, out of which a solution will lose significantly in one objective without much gain in other objectives. From the viewpoint of multicriteria decision making, 29 it is best to utilise the solutions within the ‘knee’ region. For instance, the 4th solution (507 rev min− 1 tool rotational speed and 1.29 mm rev− 1 forward feedrate) in Table 6 is a good choice in consideration of application. Under this welding condition, one can achieve very good weld quality (weld quality index < 1) and maintain a very low production cost (unit cost £13.32). As the average unit production cost without optimal design is £16.4, the generated solution contributes to a big save of £3.08 per unit, which is 18.8% of the total cost.
Ten examples of obtained solutions for third two-objective design problem

In the fourth design problem, we consider the following three objectives:



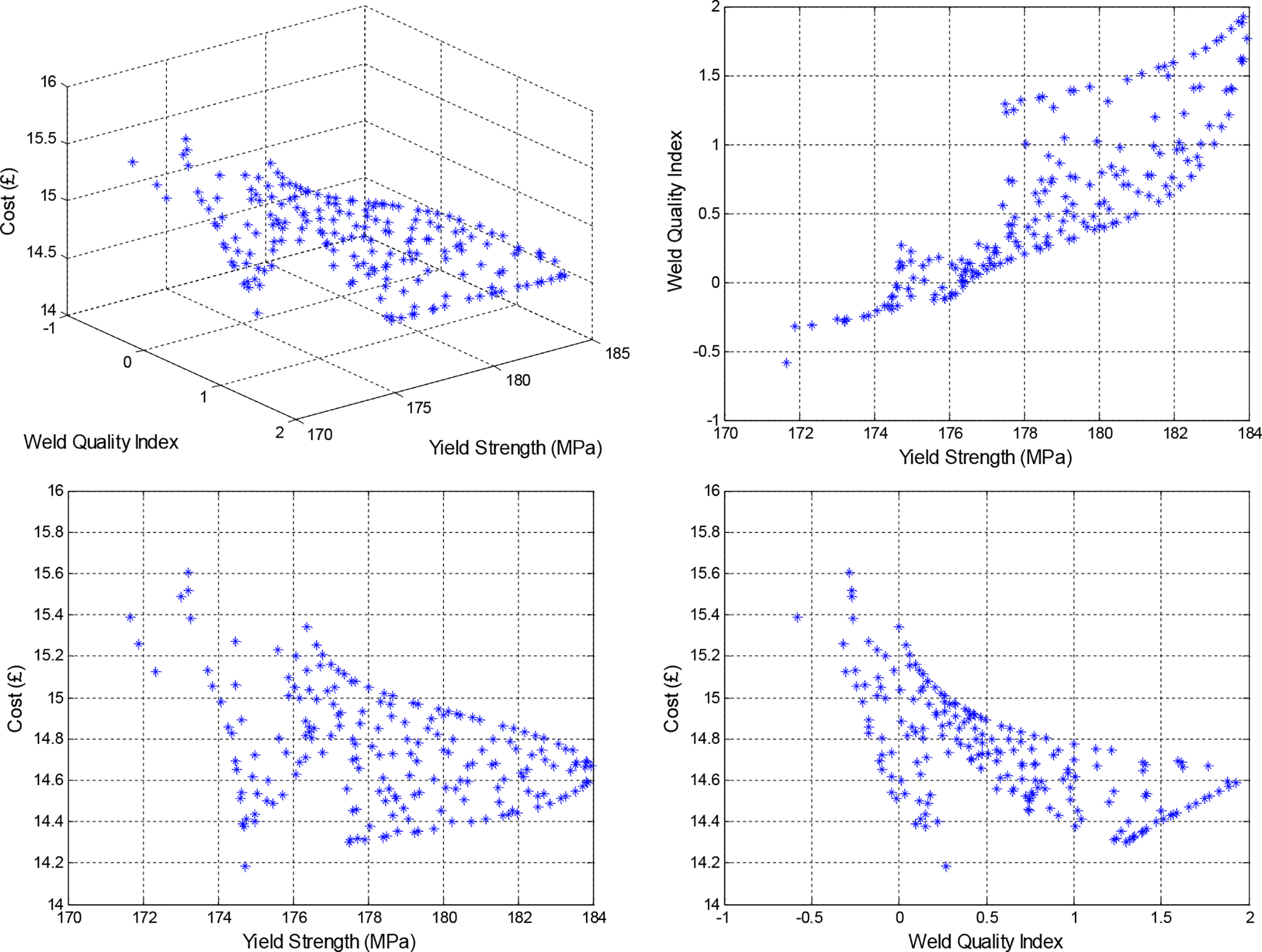
Pareto optimal solutions of three-objective optimal design problem
Ten examples of obtained solutions for three-objective design problem

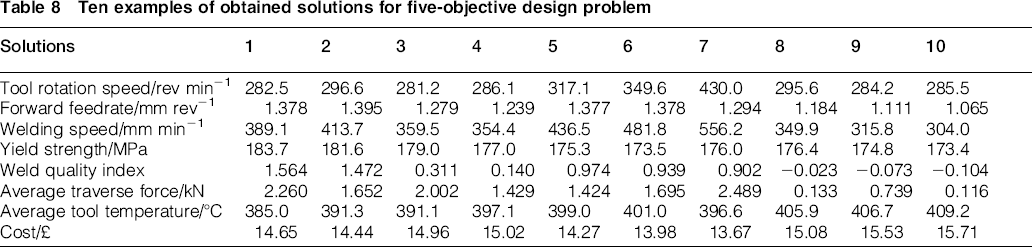
The fifth design considers the following five-objective optimal problem:





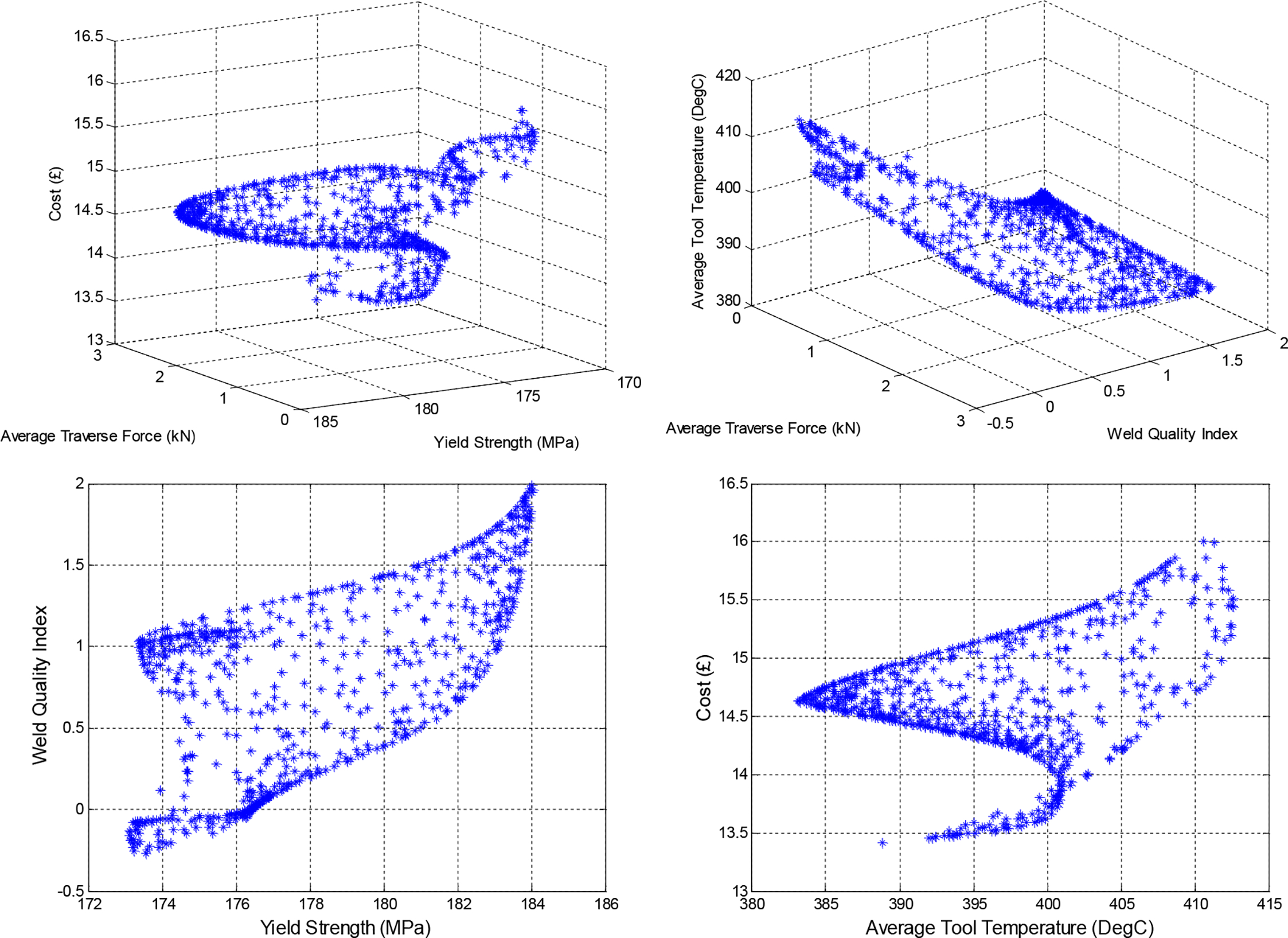
Pareto optimal solutions of five-objective optimal design problem
Ten examples of obtained solutions for five-objective design problem
Conclusions
In this paper, multiobjective optimal designs have been carried out to find the best process conditions for FSW, based on the developed predictive models. In details, a multiobjective optimisation algorithm, the multiobjective reduced space searching optimisation, has been successfully applied into a series of two- to five-objective optimal design problems, where both quality and cost aspects have been considered. A range of well distributed ‘Pareto optimal’ solutions have been found, which are close to the desired objectives and have shown good consistency with the general understanding about FSW in its physical and economic behaviours. The results can help the users understand the overall trends of gain and sacrifice. By implementing a suitable design among the competitive choices, a manufacturer is able to achieve the best in welding productivity, process reliability and cost efficiency.