
Abstract
This article proposes a framework to support postearthquake building safety and reoccupancy decisions by quantifying the change in building collapse risk following a mainshock earthquake event. This risk may be exacerbated by both an increase in seismic hazard due to aftershock activity and a reduction in building collapse resistance due to structural damage. To address these factors, the framework is based on a hazard that includes (1) both the steady-state and the aftershock occurrence rates, that is, the elevated hazard that accounts for the dependence on the mainshock magnitude and the aftershock rate that decays over time, and (2) revised collapse fragility functions that account for structural damage sustained during the mainshock. The framework is capable of addressing region-specific questions such as (1) What are the mainshock magnitudes for which aftershocks pose a life-safety concern? (2) How long does it take for the elevated risk due to aftershocks to dissipate? and (3) What gaps in current knowledge deserve further attention from the earthquake engineering and seismology communities? The framework addresses these questions for a 20-story building in San Francisco, assuming three different, hypothetical mainshock events of magnitudes 7,7.5, and 8M W on the San Andreas fault. This is followed by a parametric study that considers a range of buildings and provides a graphical representation of the elevated risk to inform building evaluation (tagging) decisions, based on the intact building’s collapse capacity, the amount of structural damage, and the length of time after the mainshock.
Introduction
One of the first steps toward recovery following an earthquake is determining whether the buildings are safe to reoccupy. This decision typically focuses on the observed building damage, without explicitly considering increased seismic hazard due to aftershock activity. The internationally recognized building evaluation guidance, ATC-20-1 (2015), offers a qualitative assessment of whether the damage has significantly reduced a building’s collapse capacity, relative to its intact condition. When damage is significant, buildings are “red-tagged,” prohibiting reoccupancy until a more detailed evaluation is made and/or the damage is repaired. Moreover, heavily damaged buildings may trigger a safety cordon (a temporary barricade), restricting access to neighboring streets and buildings. With a few exceptions, described later, much of the existing research on quantitative measures to guide building evaluations focuses on relating the degree of damage to reductions in collapse capacity (e.g. Burton and Deierlein, 2018; Luco et al., 2004; Raghunandan et al., 2015).
Some studies have explicitly linked tagging decisions to the risk of collapse by including the time-dependent ground motion hazard, in addition to the building collapse capacity. Bazzurro et al. (2004) demonstrated this concept for on the steady-state hazard and referred to the work by Yeo and Cornell (2004) for modifying the tagging decision to incorporate the additional aftershock hazard that decays over time. The difference between the steady-state and aftershock hazards arises from the conventional representation of seismic hazard as constant in time. This steady-state model assumes a Poisson process for the rate of occurrence, where the time interval between each event is random and independent, yet the average interval is known. The aftershocks that follow a mainshock disrupt this Poissonian assumption. To characterize the Poisson model for mainshocks, “clusters” of aftershocks that are spatially and temporally linked to mainshocks are removed from the event catalog (e.g. Gardner and Knopoff, 1974). These aftershocks produce additional shaking that is not included in the steady-state hazard curve, but which can be accounted for through other models.
Yeo and Cornell (2009) developed a methodology for aftershock probabilistic site hazard analysis (APSHA). The formulation mirrors the traditional PSHA for the steady-state hazard by substituting the Poissonian rate of mainshock events with a time-dependent rate of aftershock events. This rate is based on several models that collectively consider the decaying rate of aftershocks, conditioned on the mainshock event (Gutenberg and Richter, 1944; Omori, 1894; Reasenberg and Jones, 1989; Utsu, 1961). Recent aftershock collapse risk assessment studies have used the Yeo and Cornell (2009) APSHA model to determine a hazard curve that reflects the aftershock environment (Iervolino et al., 2020; Shi et al., 2020; Shokrabadi and Burton, 2018; Zhang et al., 2019). The Yeo and Cornell (2009) APSHA framework only captures the aftershock portion of the hazard; therefore, one needs to add the steady-state component to provide a complete picture of the seismic hazard after a mainshock. Other aftershock hazard frameworks exist in the literature and consider the combined hazard due to both mainshock and aftershock events (Boyd, 2012; Iervolino et al., 2020; Toro and Silva, 2001). With such approaches, the hazard results include all of the possible shaking intensities from aftershock clusters associated with each Poissonian mainshock. For the purpose of informing safety decisions following a specified mainshock scenario, the Yeo and Cornell (2009) framework is more useful because it enables one to focus the hazard analysis on the earthquake cluster following the mainshock of interest.
There are a limited number of studies that consider an aftershock environment’s increased shaking hazard coupled with the reduction in collapse capacity due to structural damage sustained during a mainshock. Jalayer and Ebrahimian (2017) estimates the limit state exceedance probability for a structure subjected to successive shaking events. This method quantifies the fragility of the structure in terms of a continuous performance variable that is not directly associated with collapse. In contrast, Galvis et al. (2023) offered a simulation approach that uses sequential nonlinear response history analyses (NLRHA) to explicitly quantify the destabilizing effects of simulated damage on the collapse capacity. Similar methods have also been proposed by other authors (Burton and Deierlein, 2018; Goda and Taylor, 2012; Zhang et al., 2019). This detailed simulation approach allows for adjustments to the intact collapse fragility function as a function of damage indicators (DIs) that are observable after the mainshock.
The elevated collapse risk framework proposed in this study uses the elevated hazard (combination of the aftershock and steady-state hazards) with collapse fragility functions that account for mainshock damage. Together, these models provide a more complete collapse risk assessment in an aftershock environment. The framework is depicted in Figure 1 as three main modules, quantifying the elevated hazard conditioned on a mainshock event (M1), the collapse performance of a damaged building (M2), and the resulting elevated collapse risk (M3). The following sections present these modules through illustrative case studies for three hypothetical mainshock events near San Francisco, considering an individual 20-story building and a parametric study for an inventory of buildings. These case studies are instrumental for (1) identifying the mainshock magnitudes that pose a relevant aftershock concern and (2) probabilistically quantifying how long the collapse risk is elevated over the steady-state risk, allowing stakeholders to have informed discussions about disaster response activities. The case studies also highlight important gaps in current knowledge that deserve further attention and research. This article is accompanied by a supplemental document to examine the sensitivity of the case study results to a number of model and parameter choices that are used in the study.
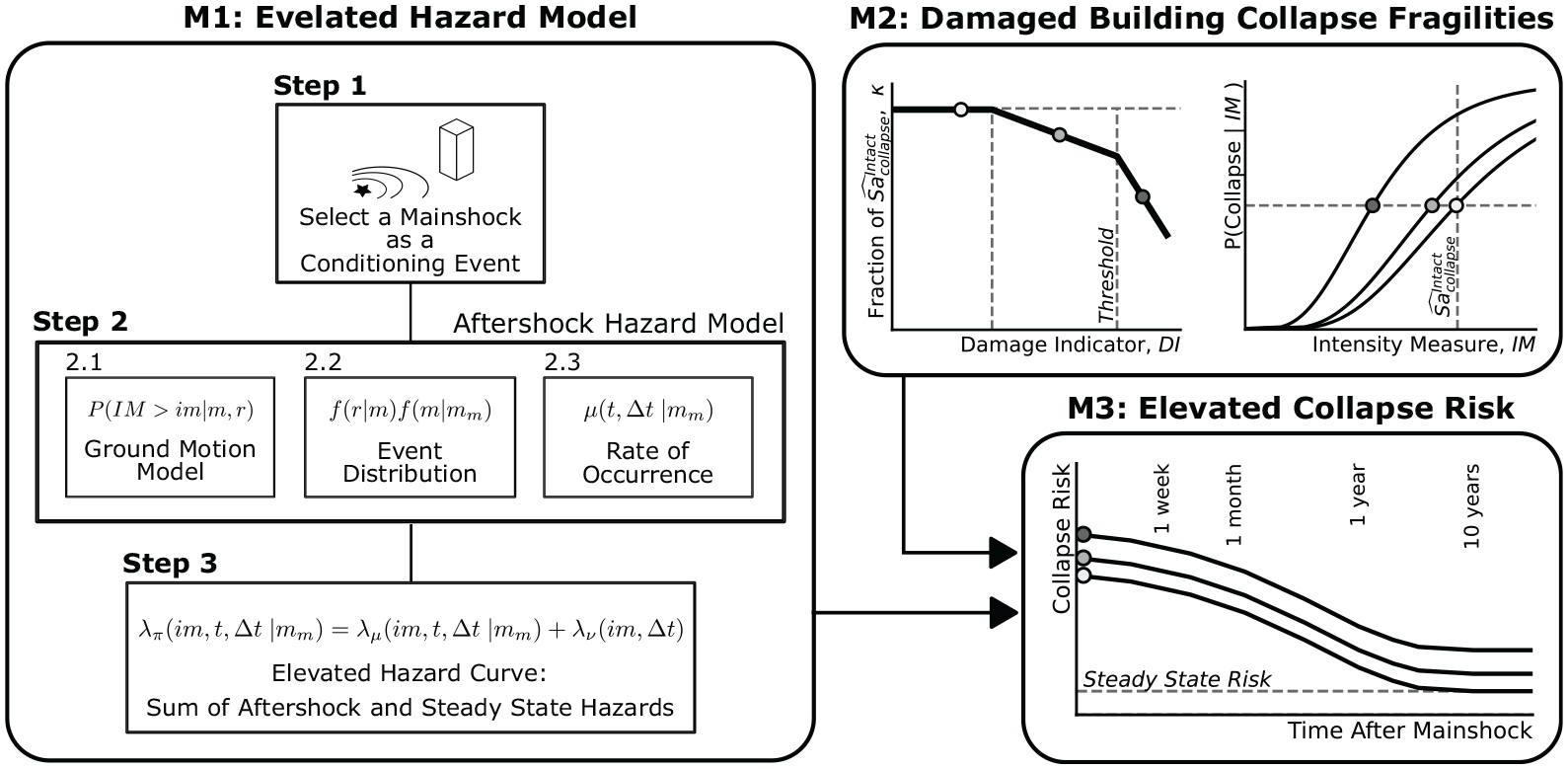
The proposed framework’s three modules, quantifying the elevated hazard (M1), the building collapse performance (M2), and the elevated collapse risk (M3).
Elevated hazard model (module 1)
The elevated hazard model is an extension of the Yeo and Cornell (2009) APSHA model. Whereas Yeo and Cornell’s APSHA model focuses primarily on the aftershock hazard, the proposed model also includes steady-state mainshock events, following the three steps diagrammed in module 1 of Figure 1. The following sections describe each of these steps, using an example site in downtown San Francisco to illustrate the procedure.
Step 1: select a mainshock as a conditioning event
The APSHA is based on an individual mainshock as a conditioning event. While Yeo and Cornell (2009) used idealized fault geometry for mainshocks of increasing magnitude, this study uses known fault geometries when selecting the conditioning mainshocks. San Francisco’s seismic hazard is primarily driven by the Hayward and San Andreas Faults (Aagaard et al., 2016). The case study focuses on an earthquake on the San Andreas Fault, which was selected due to its proximity to downtown San Francisco and the fact that it could generate rupture magnitudes of up to
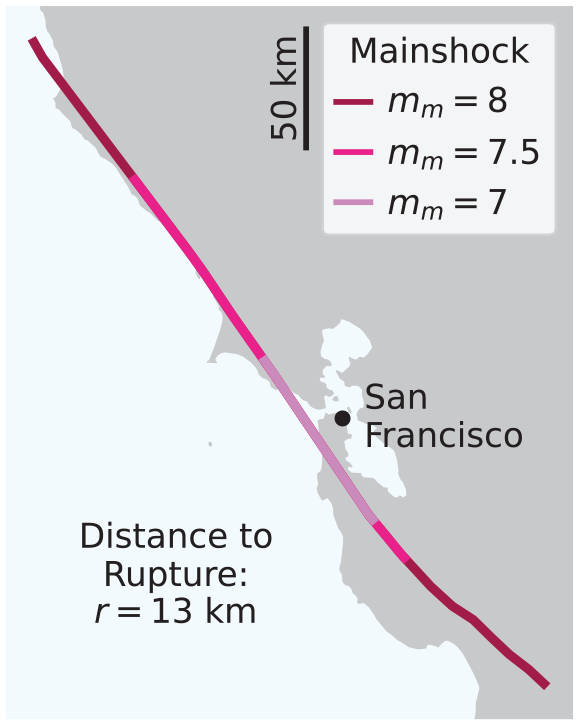
The aftershock hazard analysis is conditioned a mainshock event, shown here for three different ruptures with magnitudes
The mainshock event conditions the aftershock environment in two ways: (1) the rate of aftershocks and (2) the event distribution with respect to aftershock magnitude and location (Utsu, 1969, 1971). The general concept of unique aftershock environments for each mainshock is discussed in the context of the Reasenberg and Jones (1989) model. This model combines the modified Omori’s law,

Model parameters for the decaying rate of aftershocks, using Equation 1
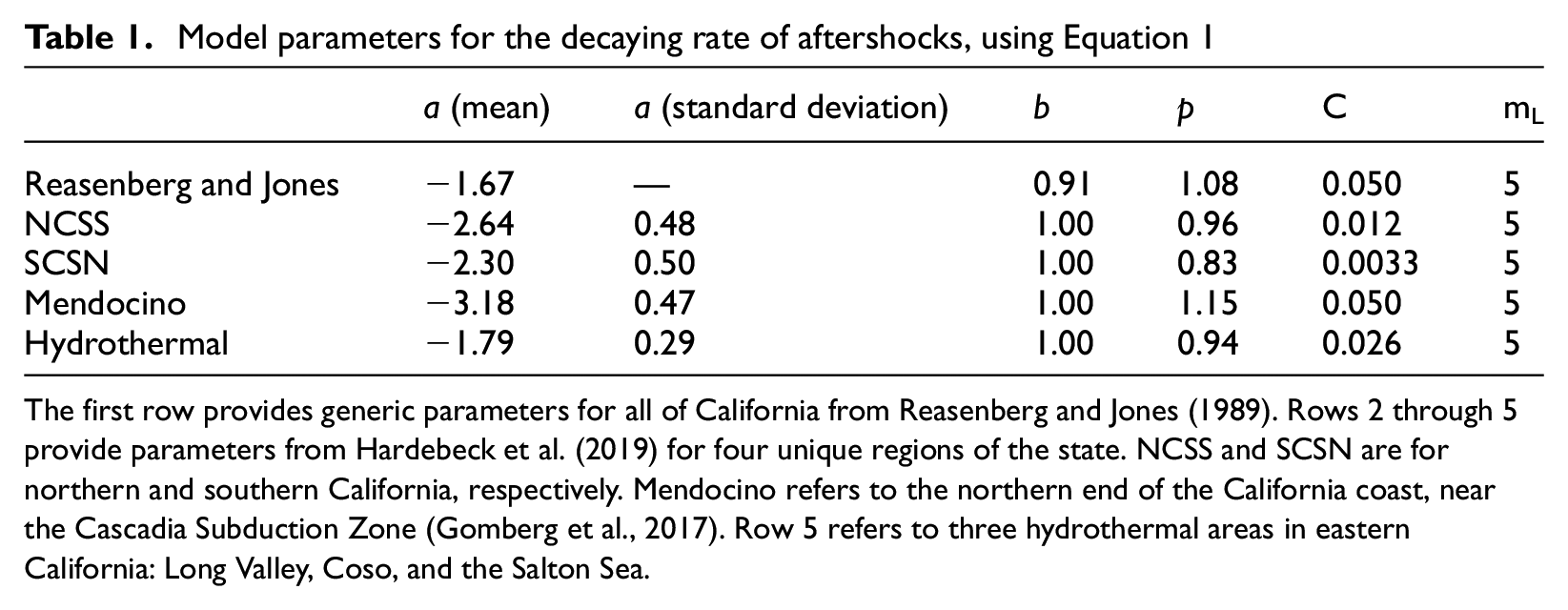
The first row provides generic parameters for all of California from Reasenberg and Jones (1989). Rows 2 through 5 provide parameters from Hardebeck et al. (2019) for four unique regions of the state. NCSS and SCSN are for northern and southern California, respectively. Mendocino refers to the northern end of the California coast, near the Cascadia Subduction Zone (Gomberg et al., 2017). Row 5 refers to three hydrothermal areas in eastern California: Long Valley, Coso, and the Salton Sea.
The case study presented here will use the Table 1 parameters for northern California (NCSS). Note that NCSS parameters reflect a less active aftershock environment than southern California (SCSN). The Hardebeck et al. (2019) parameters for each region are derived based on statistics and do not have direct physical meaning. However, the resulting aftershock occurrence intervals are consistent with intuition based on general knowledge of California’s fault geometries.
Step 2: aftershock hazard model
The Reasenberg and Jones (1989) model in Equation 1 is generally considered a reasonable approach for estimating the rate of aftershock events. However, engineers and decision-makers need the exceedance rate of specific shaking intensities, considering both aftershocks and steady-state events. The APSHA framework is a tool to quantify the rate of the former. This framework is described by Equations 2 and 3, which is conceptually similar to the more traditional PSHA model for the steady-state hazard (Cornell, 1968):


The double integral (Equation 2) is familiar from PSHA (shown later by Equation 11), where
Step 2.1: ground motion model
The ground motion hazard formulation of the APHSA model (Equation 3) is identical to the traditional steady-state PSHA model (discussed later in Equation 11), where
The case study uses the GMM by Boore et al. (2014, hereafter BSSA14), which is one of the models that is used for PSHA of the Western United States and has been recently validated for continued use (McNamara et al., 2020). The selected site in downtown San Francisco has an average shear wave velocity over the top 30 m of
Recent studies (e.g. Shokrabadi et al., 2018) have suggested using GMMs, such as Chiou and Youngs (2008), which include significant differences in the spectral shape of the mainshock and aftershock ground motions. Note that use of a GMM that differentiates between mainshocks and aftershocks would also necessitate an aftershock-specific collapse fragility, due to the influence of the spectral shape on structural response. In contrast, the BSSA14 GMM used in the case study does not include spectral shape differences for aftershock events. Included with this article is a supplemental document with details of a sensitivity analysis to examine the aftershock hazard adjustment in Chiou and Youngs (2008) GMM. Selecting the GMM is an important assumption in the framework that must be carefully considered. Ideally, an implementation of this framework for decision-making in the public sector would consider the epistemic uncertainty in the selection of GMM via logic trees. Please note that defining such logic trees for an aftershock environment is outside the scope of this article.
The choice of intensity measure,

An



Step 2.2: aftershock event distribution
The event distribution terms,
The aftershock magnitude distribution is based on the bounded Gutenberg–Richter recurrence law re-written in Equation 8 (Cornell and Vanmarcke, 1969):

where

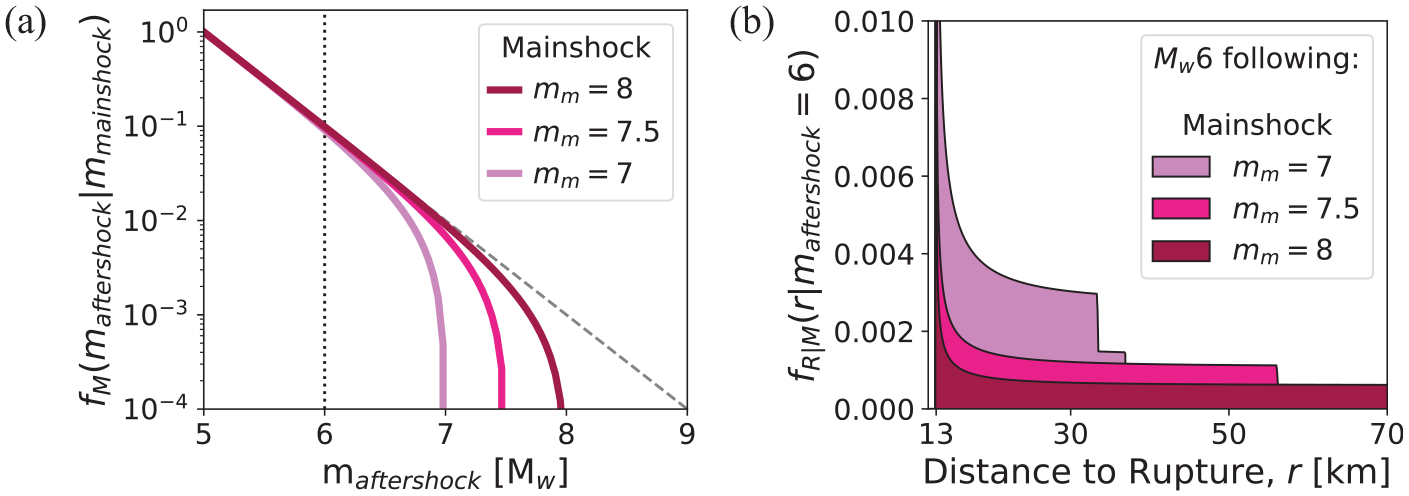
Aftershock event distributions: (a) Magnitude: the probability of exceedance for the Gutenberg–Richter recurrence law, bounded by the magnitude of each mainshock event. The vertical dotted line crosses at the probability of an aftershock magnitude
The aftershock location distribution is conditioned on the magnitude, as implied by the
Step 2.3: rate of aftershock occurrence
The rate of aftershock occurrence term,
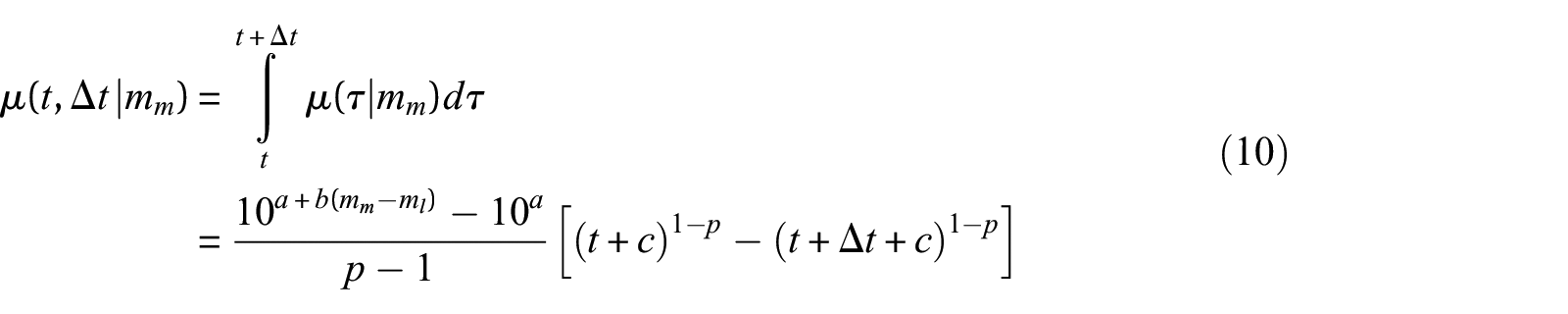
The parameters in Equation 10 were defined in Table 1. Assuming the NCSS values for a generic northern California aftershock environment, the decay in the daily rate of aftershocks following a
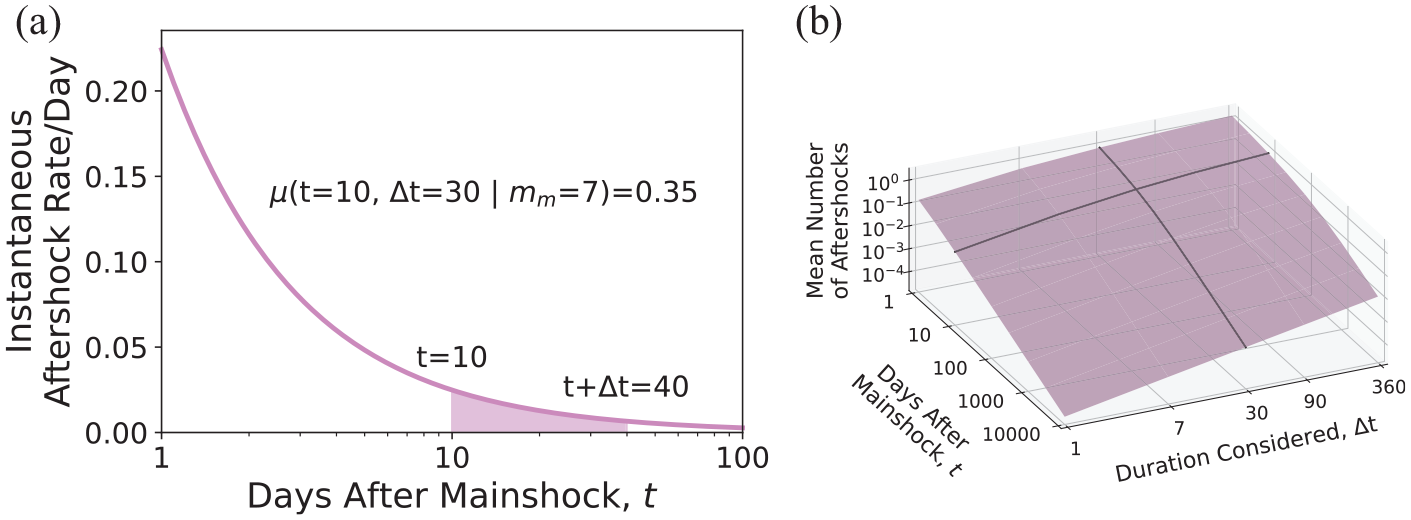
The rate of aftershocks over time (Equation 10): (a) The purple line shows the daily rate of aftershocks following a
The vertical axis in Figure 4b is in log scale, making the exponential decay rate appears linear for
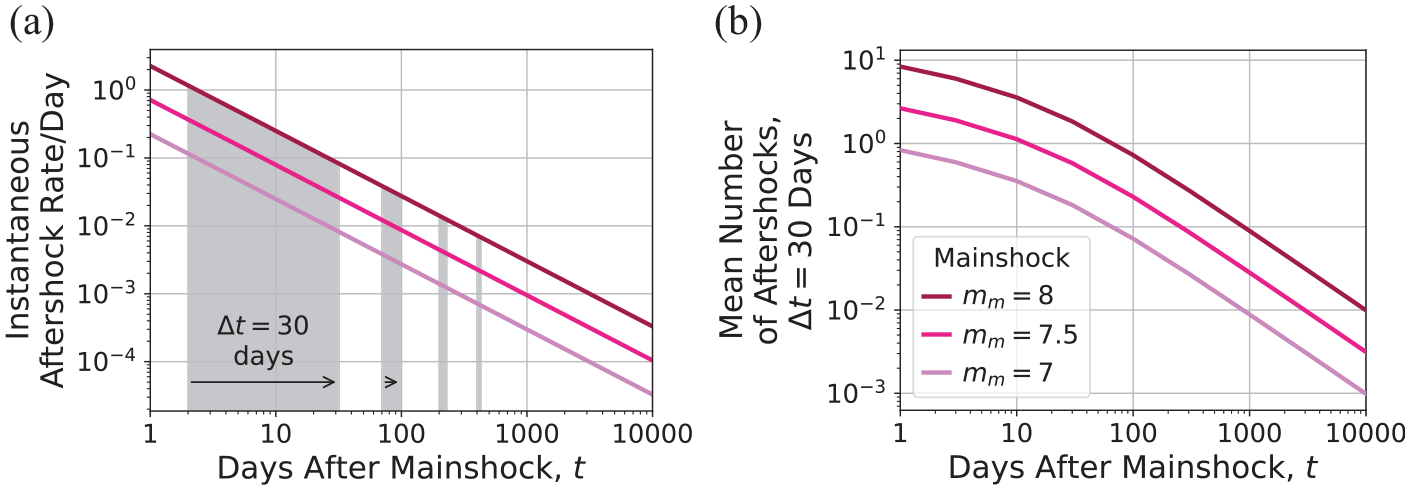
The rate of aftershocks (Equation 10) following each mainshock event: (a) The daily rate of aftershocks is linear in log scale. The gray bands visually depict the effect of the log scale, which appears to shrink the constant width of the duration,
The magnitude and location distributions provide the input needed for the GMM. Integrating over all possible aftershock events (Equation 2) provides the probability of exceeding a shaking intensity given that an aftershock occurs,
Step 3: elevated hazard curve
The APSHA framework only considers the elevated and decaying hazard within a single earthquake cluster. To obtain the total seismic hazard in an aftershock environment, one needs to combine the aftershock with the steady-state earthquake rates, resulting in a hazard that is elevated after a mainshock but decays back to a steady state over time.
Both PSHA and APSHA calculate the rate of exceeding a shaking intensity,

In Equation 11,
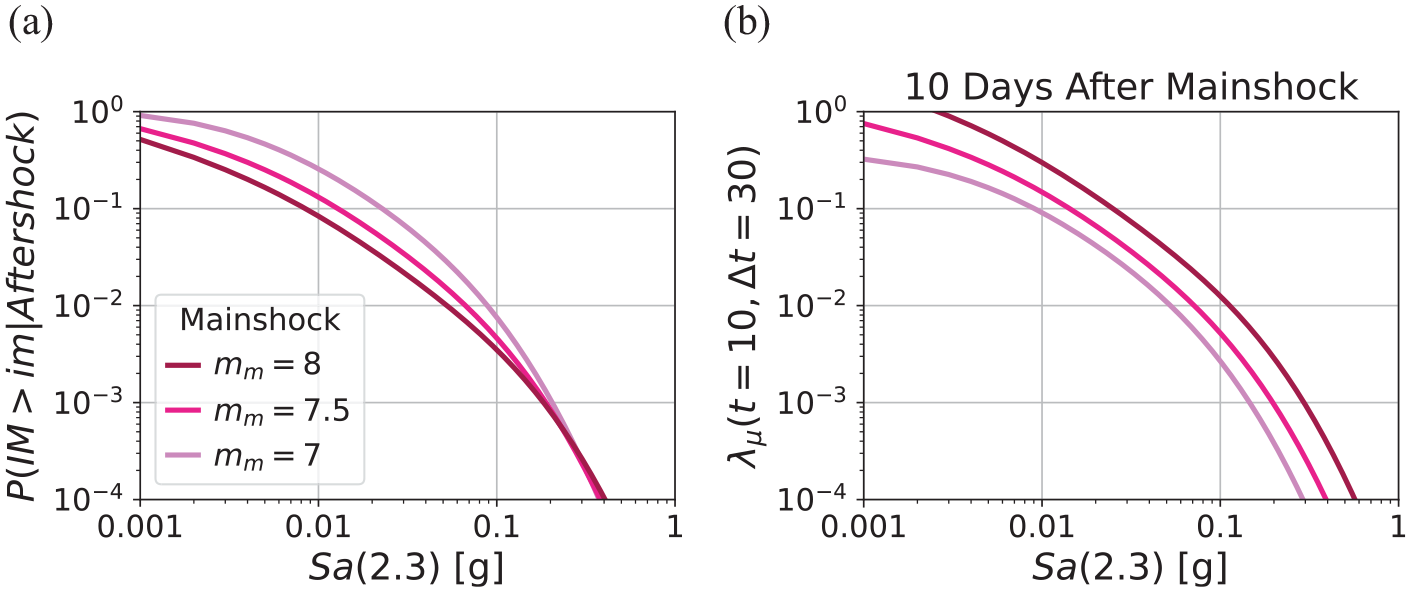
Figure 6a illustrates the
To obtain the steady-state hazard curve, this case study integrates over all mainshock events by using SimCenter’s EQHazard tool (available at https://github.com/NHERI-SimCenter/GroundMotionUtilities/tree/master/EQHazardhttps://github.com/NHERI-SimCenter/GroundMotionUtilities/tree/master/EQHazard) to compile an event catalog from OpenSHA’s Monte Carlo event set for UCERF2 Field et al. (2008). The catalog includes all events within a 200-km radius of downtown San Francisco. The events are then sorted into discrete magnitude and distance bins
Both the aftershock

Figure 7a shows the hazard following a
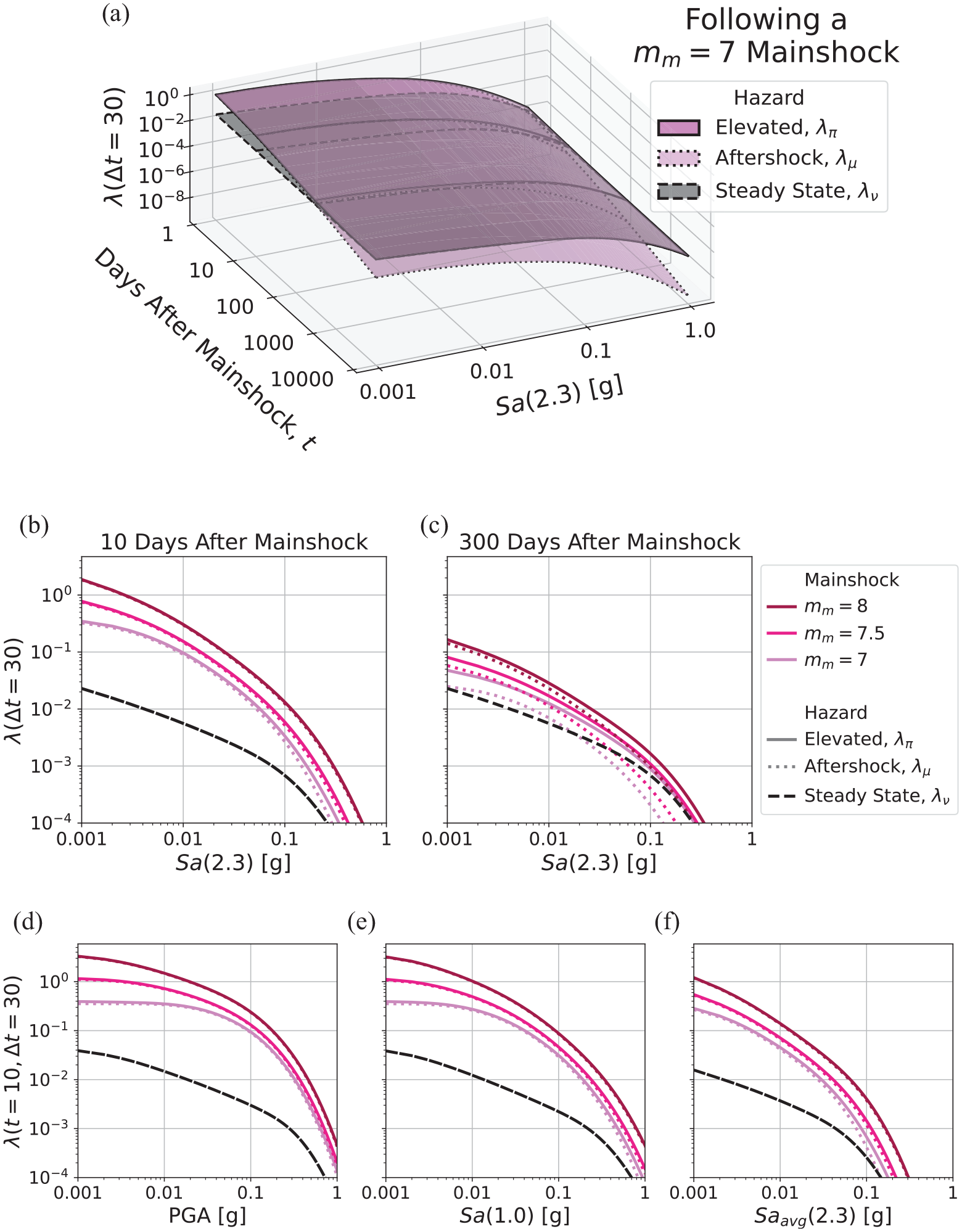
The elevated hazard includes both the aftershock and steady-state hazards: (a)
Figure 7d, e, and f shows the
Collapse risk for an individual building
With the elevated hazard model (M1 in Figure 1) complete, the next modules address the damaged building performance (M2) and the elevated risk (M3). These modules are illustrated with an individual building in this section and with a range of generic buildings (i.e. a parametric study) in the following section. Building collapse risk is calculated by integrating the ground motion hazard and the building’s collapse fragility. Since the ground motion hazard is described in terms of a temporal rate, the risk of building collapse under earthquakes is likewise typically expressed as a rate of collapse,

where
Damaged building collapse fragilities (module 2)
The collapse risk after a mainshock depends on the intact building’s collapse fragility (the probability of collapse as a function of the earthquake shaking intensity), as well as any damage the building may have experienced during the mainshock. In contrast to the conventional fragility function,
Concerning the choice of
Galvis et al. (2023) propose a methodology for estimating the collapse safety of a damaged building, based on


Next, the intact building is subjected to each of the ground motion records, scaled to multiple intensities, to induce different levels of damage that may occur under an earthquake mainshock. Each of these analyses is considered a building damage instance, which is described by a scalar DI calculated as a function of one or more structural demand parameters (e.g. peak story drift) under the damaging ground motion. Then, a second IDA is performed, using the same set of ground motions as applied to the intact building, to determine the median collapse capacity of the damaged building,

The purpose of simulating damage instances and assessing their new collapse performance is to fit a regression for

Galvis et al. (2023) assessed the damaged collapse fragilities for ductile reinforced concrete (RC) moment frames designed per ASCE 7-02 (2002) and ACI 318-05 (2005) for a high seismic hazard location in Los Angeles on soil class D. The archetype designs and numerical models were developed by Haselton et al. (2008). The archetypes were idealized as two-dimensional frames and modeled using OpenSees where beam and column hinges are lumped plasticity elements using the Ibarra-Medina-Krawinkler (IMK) model (Ibarra et al., 2005) with parameters specifically calibrated for RC elements. The flexibility of beam-column joints is represented by an elastic spring implemented by the Joint2D (Altoontash, 2004) element in OpenSees. The column bases have elastic rotational springs to represent foundation flexibility. The destabilizing effects of the gravity framing are included by means of a leaning column.
The case study focuses on a 20-story building with
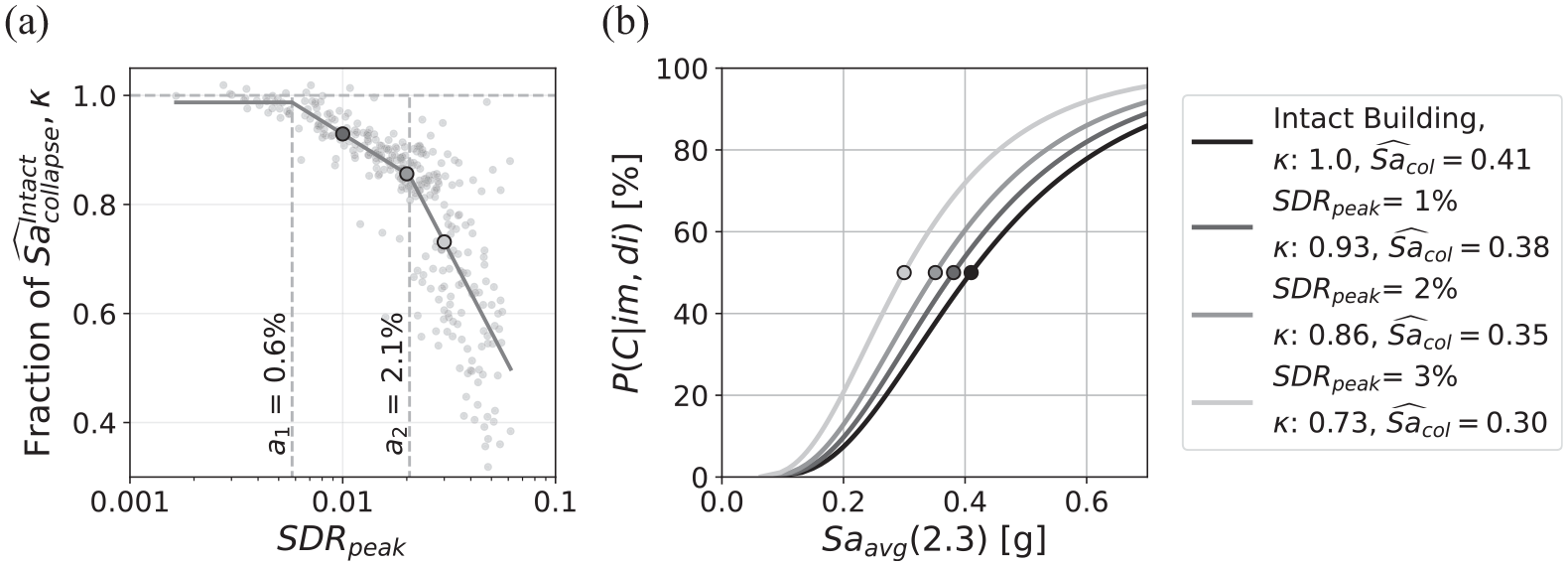
Collapse performance of a damaged 20-story, modern reinforced concrete frame building:
Elevated collapse risk (module 3)
Using the elevated hazard curves and the collapse fragilities of a damaged building, the collapse risk for each damage instance can be computed in terms of the rate of collapse,
Due to the aftershock hazard, the risk of collapse of any building increases compared with the steady state until the aftershock hazard decays to a negligible level. Figure 9a presents the effect of aftershocks for the intact 20-story building introduced in the previous section. Figure 9a considers the
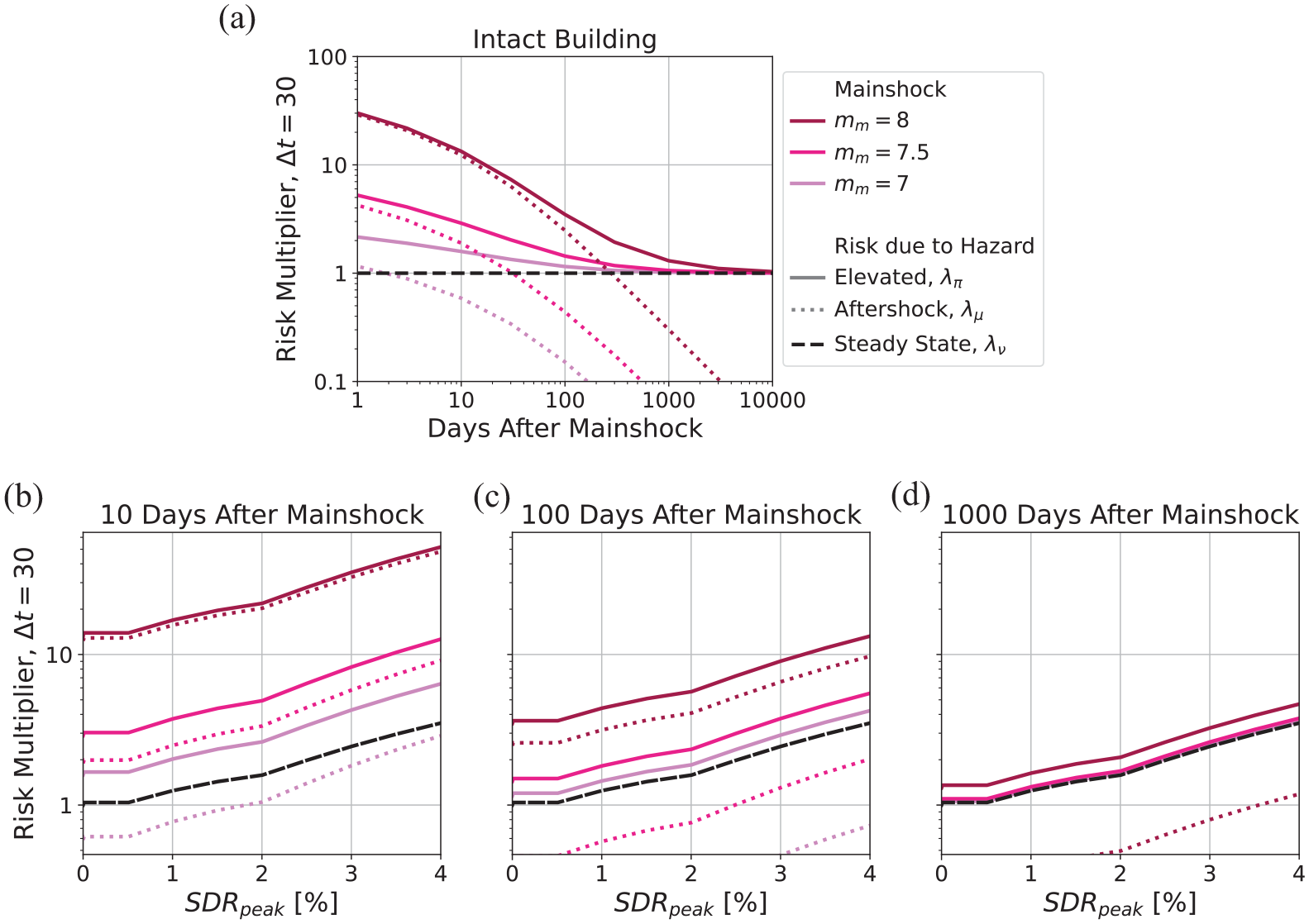
Elevated risk due to aftershocks and building damage: (a) The intact building’s risk multiplier following each mainshock magnitude decays over time. The solid, dotted, and dashed lines correspond to the
In addition to the change in risk due to elevated aftershock hazard, building damage caused by the mainshock will also increase the risk by reducing the collapse capacity, as indexed by
Collapse risk for a parametric study
Communities are comprised of large inventories of buildings with varying heights, configurations, materials, and ages, which will affect their dynamic response and resistance to earthquake damage. To start moving beyond the individual building to community-scale earthquake risks, buildings with varying fundamental periods of vibration and design strengths (as implied by their inherent structural collapse capacities) are evaluated.
Damaged building collapse fragilities (module 2)
The first parameter considered is the building period. Figure 10a and b superimposes the collapse fragility curves and seismic hazard curves for two buildings with periods of
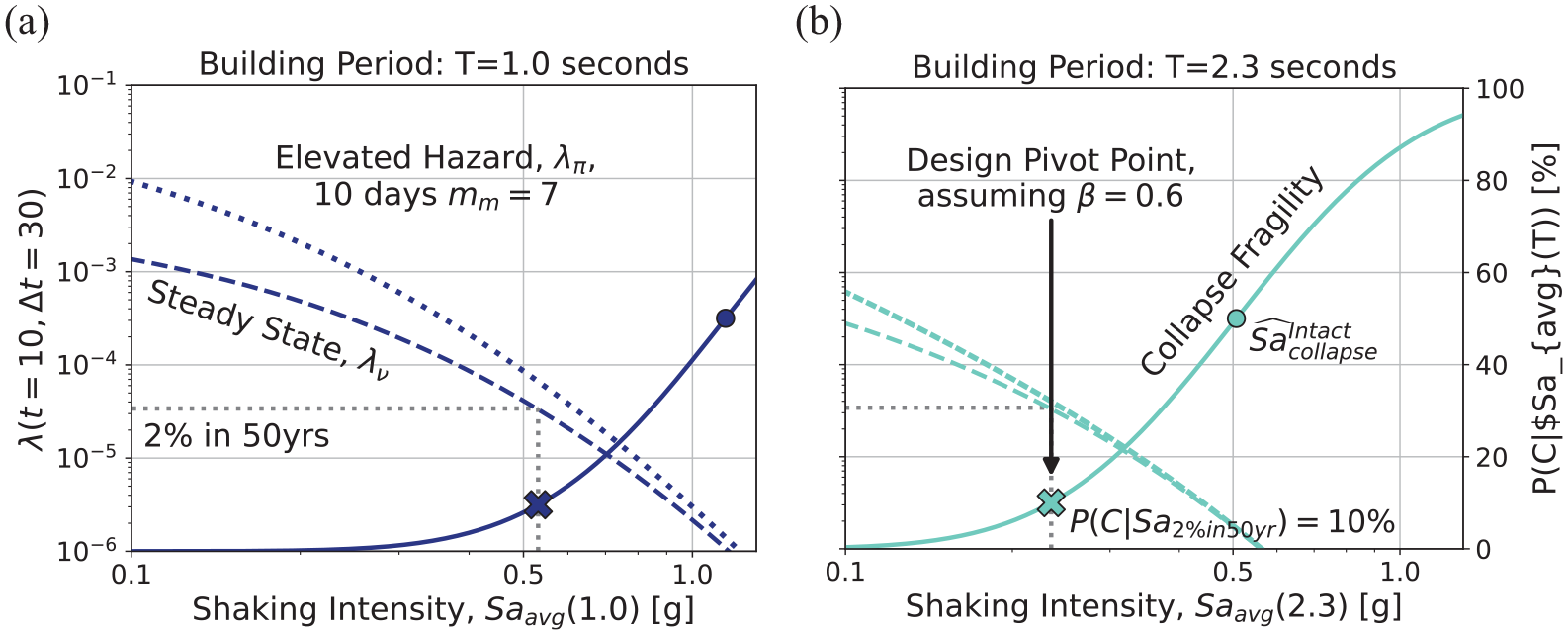
Examples of the parametric collapse fragilities that represent a building inventory, shown here for fundamental periods of
The collapse fragility curve is anchored to a 10% probability of collapse for a ground motion
Once
Elevated collapse risk (module 3)
The elevated collapse risk for the portfolio is evaluated for two points in time: 10 days after the damaging mainshock and long after the mainshock, when the elevated hazard has decayed back to the steady state. Note that the time until the elevated hazard reduces to the steady state depends on the mainshock magnitude (Figure 9a). To compare the risk across various design targets, the reported RMs are normalized by
First, consider the effect of building damage (without the elevated aftershock hazard) on the RMs. The gray band in Figure 11a shows the steady-state RMs for code-compliant (i.e.
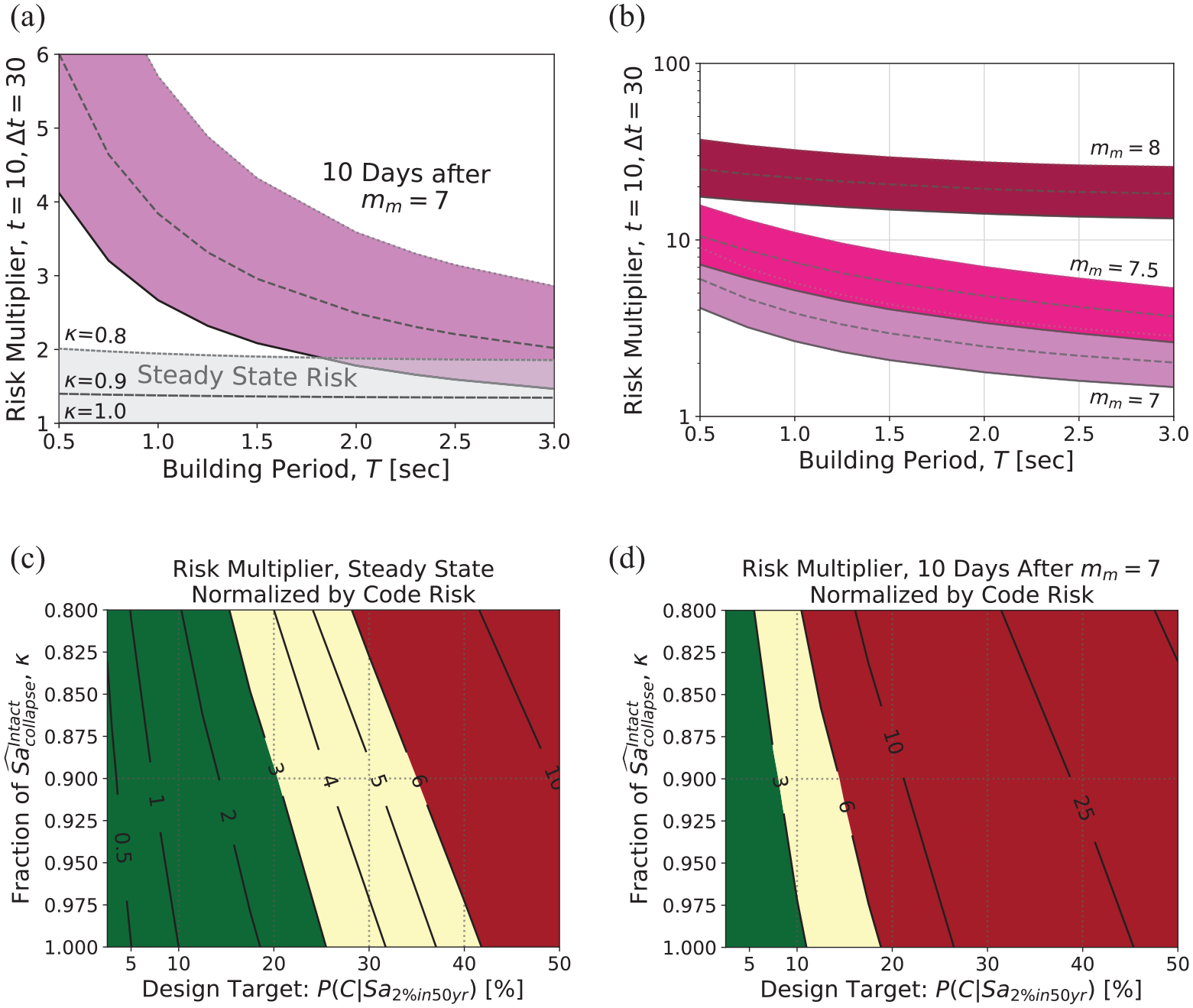
Risk multipliers, for buildings with a range of periods, design target criteria, and mainshock damage: (a) Risk due to the steady-state hazard (transparent gray) or the elevated hazard 10 days after a
Next, consider the effect of aftershock hazard, which elevates the hazard curve over the steady-state hazard (dotted versus dashed hazard curves in Figure 10). As shown by the purple band in Figure 11a, for 10 days after a
The RMs associated with the
The building reoccupancy evaluation (i.e. tagging) criteria can be evaluated based on the damage level,
The green, yellow, and red fill colors in Figure 11c correspond to the Yeo and Cornell (2004) RM tagging thresholds for commercial and office buildings:
The results in Figure 11d are similar to those of Figure 11c, but consider the elevated hazard 10 days after a
Rather than using red tags to restrict occupancy immediately following a high-magnitude mainshock, the intact building design targets (x-axis) could be used to inform postmainshock mandatory retrofits. For example, after the Kaikōura earthquake in 2016, New Zealand implemented a mandatory retrofit program for unreinforced masonry (URM) buildings as part of the Earthquake Prone Building policy (Tong et al., 2022). This policy was informed by life-safety risk studies that identified URM buildings as particularly vulnerable and evaluated the life-safety improvement due to various levels of retrofit requirements.
Regardless of the tagging criteria or retrofit policies employed, this elevated risk methodology offers a powerful way to quantify and communicate building collapse risks to inform postearthquake decisions.
Discussion of hazard model assumptions
“The Elevated Hazard Model” section describes the Yeo and Cornell (2009) APSHA model and shows how it can be combined with conventional PSHA to define an elevated postearthquake hazard, which dissipates back to a steady state over time. The collapse risk studies for an individual building and a parametric study demonstrate how the elevated hazard, combined with reductions in building collapse capacity due to earthquake damage, can be used for postearthquake assessment of building safety. The analyses demonstrate that the elevated aftershock hazard is a significant contributor to collapse risk, particularly for mainshock earthquakes with
The terms in the APSHA model (Equation 3) provide a framework for linking aftershock rates with the probability of exceeding shaking intensities, given the occurrence of an aftershock. As such, neither the assumptions in this case study nor those in the original case study (Yeo and Cornell, 2009) should be seen as constraints on how the model can be used. To facilitate further exploration of these topics, a few of the assumptions in this case study are discussed here. The discussion is concluded with Figure 12, showing the results from a forward propagation of uncertainty for parameters relating to ruptures following the mainshock event. More details on the sensitivity analyses are included in the supplemental document.
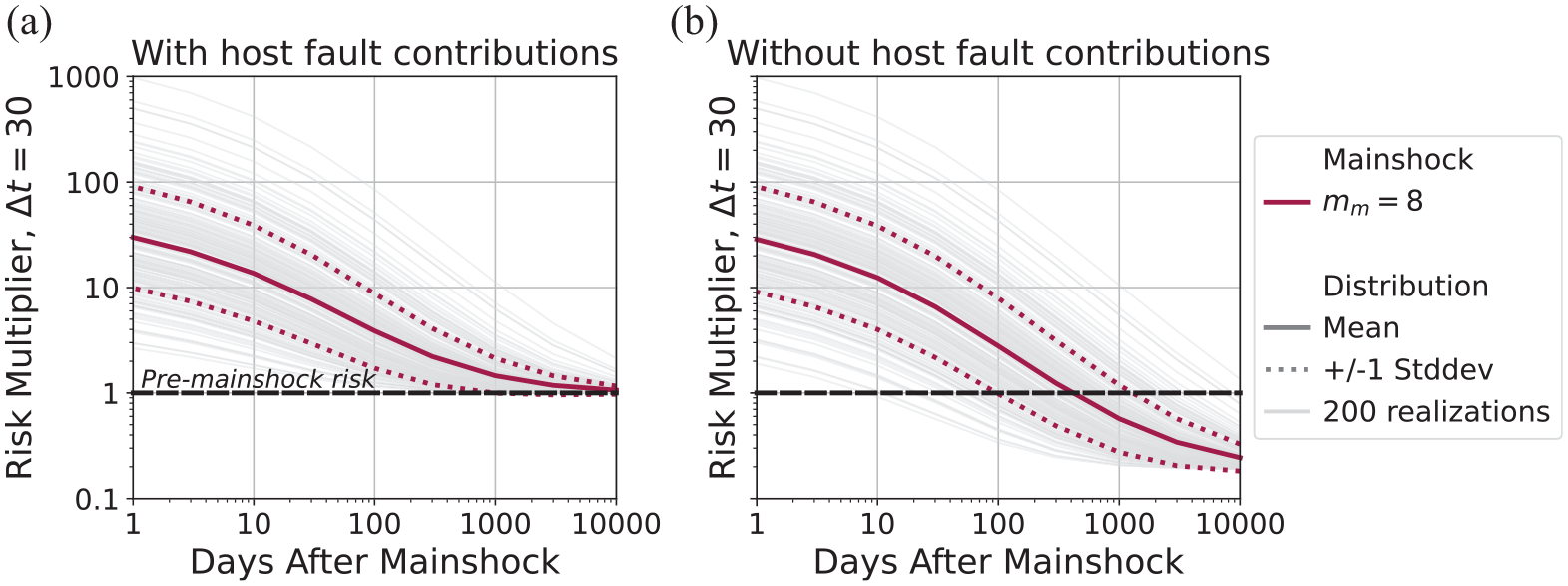
Forward propagation of uncertainty for the elevated collapse risk following a
Ground motion model (GMM)
GMMs rely on recorded ground motion records to characterize the range of shaking intensities that could result from an earthquake rupture event. The difference between ground motion intensities of the mainshock and aftershock events is an important yet unresolved question. The Boore et al. (2014) GMM (BSSA14, used in the case study) does not differentiate between the two types of events. The case study results suggest that the risk due to elevated hazard decreases for buildings with longer periods (Figure 11b). In contrast, the Chiou and Youngs (2008) (CY08) GMM includes an adjustment for aftershocks, whereby the long period portion of the spectrum is higher for aftershocks than for mainshocks. A reassessment of the results using the CY08 GMM aftershock adjustment suggests the risk increases with building period (i.e. for taller buildings), rather than decreasing as in the case study. Such an effect would be particularly relevant for evaluating postearthquake recovery of dense downtown regions of cities, including considerations related safety cordons (e.g. Hulsey et al., 2022), where cordons around a damaged tall building would restrict access to more neighboring buildings than cordons around shorter buildings.
The BSSA14 GMM is also not dependent on the depth to the top of the rupture,
Many well-known GMMs have been updated to include new ground motion records as part of the Next Generation Attenuation (NGA) West2 project (Ancheta et al., 2013). While the CY08 and Abrahamson et al. (2014) GMMs include an aftershock flag that increases the aftershock intensities at longer periods, the updated Chiou and Youngs (2014) GMM no longer includes an aftershock flag. As already noted, the Boore et al. (2014) GMM used in the case study found practically no difference in the between-event residuals for aftershocks versus mainshocks and, therefore, estimates the same amplitudes for both event types.
The limited data for large-magnitude aftershock events present a significant challenge to reliably assessing the aftershock hazard and risk. For example, the ratio between the CY08 GMM aftershock and mainshock intensities varies by period but not by magnitude or distance. As more structural engineering studies consider risk due to aftershock events, it is crucial to better understand the nature of aftershock ruptures and the ground motions they produce. As suggested during the initial discussion of GMMs, a study for use in decision-making would ideally consider the epistemic uncertainty in GMMs via logic trees.
Aftershock event distribution
The event distribution assumptions control the aftershock magnitudes and locations. Yeo and Cornell (2009) used the bounded Gutenberg–Richter recurrence law, limiting the shaking intensity that can be generated by capping the aftershock magnitudes at the mainshock magnitude,
The case study used the Wells and Coppersmith (1994) relationship for the surface rupture length of the aftershock ruptures, given their magnitude, but it did not consider uncertainty in the coefficients of this relationship. The variability for the magnitude to surface rupture length relationship is lognormally distributed for strike-slip faults (per Wells and Coppersmith, 1994). This parameter was included in the forward propagation of uncertainty for Figure 12, using inverse transform sampling from the lognormal cumulative distribution function.
The Yeo and Cornell (2009) location distribution assumes that the aftershocks occur on the same fault, within the same rupture surface as the mainshock. Yet, just as the steady-state hazard can be modeled as either known faults or area sources, aftershock location models can also take various forms. San Francisco’s earthquake hazard is driven by well-mapped faults, so it is reasonable to model the aftershocks on the same faults. However, this assumption may not be appropriate for other tectonic regions such as Christchurch, New Zealand, or Italy. For example, Italy’s steady-state hazard is characterized by area sources. Iervolino et al. (2020) carried this assumption into the APSHA by using an area distribution centered on the mainshock’s hypocenter (Utsu, 1969). Boyd (2012) discussed the merits of both these models. Han et al. (2015) went even further in developing an event distribution that is representative of the cluster-specific aftershock hazard, drawing on other work that carefully considered not only the maximum magnitudes and the location but also the aftershock ground motions as compared with those of the mainshock (Lee and Foutch, 2004; Li and Ellingwood, 2007; Sunasaka and Kiremidjian, 1993). Or, as discussed in the next section, the event distribution could be linked to the aftershock rate by using a spatiotemporal model, such as the epidemic type aftershock sequence (ETAS) model or the hybrid short-term earthquake probabilities (STEP) and Coulomb model.
Rate of aftershock occurrence
The final term in the APSHA methodology characterizes the rate of aftershock occurrences in time. The generic aftershock parameters include uncertainty on the base rate,
Furthermore, while the case study considers the postearthquake environment for possible future scenario earthquakes, the framework would also be relevant in the aftermath of a real event. In such a case, Bayesian updating could be used for the parameters, as suggested by Page et al. (2016), which would reduce the need for the forward propagation of uncertainty.
The case study followed Yeo and Cornell (2009) in using the Reasenberg and Jones (1989) model for aftershock rate of occurrence. By choosing a temporal-only model, the rate of occurrence is independent of aftershock event distributions for magnitude and location. This independence makes the APSHA very flexible, allowing the modules to be refined independently of each other. However, spatiotemporal models could also be incorporated, albeit with more complicated bookkeeping. Like Reasenberg and Jones (1989), epidemic-type aftershock sequence models (ETAS, e.g. Ogata and Zhuang, 2006) and the short-term earthquake probability model (STEP, Gerstenberger et al., 2005) are derived from the statistically based modified Omori’s law and the Gutenberg–Richter recurrence law. Alternatively, the physics-based Coulomb stress method or the Steacy et al.’s (2013) hybrid model could be used to more directly consider how earthquake ruptures affect the surrounding region through changes in static stress (e.g. Dieterich, 1994). The APSHA methodology could be adjusted to incorporate any of these aftershock rate models.
Steady-state hazard
Finally, the assumptions for the steady-state hazard were considered. The case study maintained the same steady-state hazard before and after the mainshock event. This is consistent with the Poissonian assumption that the average time interval between (nonaftershock) events is constant, though the intervals between each event are random and independent. This assumption has been statistically demonstrated and is common in seismic hazard analysis. However, the assumption is in conflict with the elastic rebound theory (Reid, 1908), which suggests that a rupture releases the built-up elastic strain energy, reducing the likelihood that it will rupture again in the near future. To evaluate the relative impact of this theory, the San Andreas fault was removed from the event catalog before recalculating the steady-state hazard. This eliminated the potential for future mainshock events from the fault on which the mainshock originated (the host fault). The elevated collapse risk with and without the host fault contributions is shown in Figure 12a and b, respectively. As expected, removing the host fault causes the elevated collapse risk to decay to a RM lower than 1, since the steady-state risk is lower after the mainshock than before the mainshock. On the contrary, the difference in risk is comparatively less within 100 days of the mainshock. While this approach demonstrates the extreme of suppressing any future mainshock events on the host fault, it also introduces many other assumptions, including how much of the fault should be suppressed and how its contribution would be reintroduced. The use of the elastic rebound theory versus the Poissonian assumption is an ongoing debate among the seismological and earthquake engineering research communities. For example, the Kaikōura, New Zealand earthquake in 2016 is considered an unusual anelastic rupture, challenging the assumption regarding elastic strain release (Diederichs et al., 2019).
The study for the forward propagation of uncertainty included 200 realizations of the elevated collapse risk for the 20-story building after a
In summary, the most appropriate choices for the GMM, the event distribution model, the aftershock rate model, and the steady-state hazard assumptions would depend on the specific objectives of the study, as well as knowledge of the local earthquake sources. An informed researcher can incorporate any number of refinements as they implement the elevated hazard model for their own use.
Discussion of damaged building collapse fragility assumptions
The effect of structural damage on the collapse fragility is captured by the trilinear relationship between a relevant DI and the shift in the median value of the fragility function
Selecting the relevant DI for this purpose should follow the methodology proposed by Galvis et al. (2023), in which an appropriate DI has four characteristics: (1) be efficient in predicting the collapse safety of damaged buildings, (2) be observable or easily estimated, (3) have a relationship that is relatively insensitive to building height, and (4) be relatively insensitive to modeling uncertainty.
The Galvis et al. (2023) methodology has five steps for selecting a DI from a set of candidates. The candidate set is identified by engineering judgment, in consideration of the raw data from back-to-back IDAs. The first step fits a trilinear relationship to predict
For ductile RC moment frames, the peak story drift ratio complies with the first two characteristics desired in the DI (efficiency and ease of estimation/measurement). However, it is outperformed by other DIs—such as the fraction of damaged components—in terms of their robustness to the number of stories and modeling uncertainty. Applications of this framework should further explore the implications of selecting other DIs on which to condition damaged collapse fragilities for each structural system of interest.
Summary and conclusion
This article provides a framework to (1) identify the mainshock magnitudes that pose a relevant aftershock concern for a location of interest and (2) quantify how long it takes for the aftershock hazard to dissipate. A sensitivity study is also included to (3) highlight the most important gaps in current knowledge that deserve further attention and research from the earthquake engineering and seismology communities.
The proposed framework extends the APSHA model (Yeo and Cornell, 2009) by combining the aftershock and steady-state hazards to obtain an elevated postearthquake hazard curve. Yeo and Cornell (2009) assume that the aftershock occurs on the same fault and rupture surface as the mainshock, which is assumed to be appropriate for tectonic settings such as the vertical strike-slip faults in the San Francisco Bay Area. The elevated hazard allows the framework to quantify building collapse risk following a mainshock at different points in time, considering the relative contributions of aftershock activity and the destabilizing effects of building damage sustained during the mainshock.
This article demonstrates the proposed framework with a case study for a 20-story RC frame building located in downtown San Francisco. The mainshocks are assumed to rupture the portion of the fault closest to the city as worst-case scenarios. Based on the case study and the associated modeling assumptions, the elevated collapse risk for buildings in downtown San Francisco is highly dependent on the magnitude of the mainshock event on the San Andreas Fault. For a
The results of the case study are subject to modeling assumptions, which were discussed to shed light on potential areas of future research (see the supplemental document for more details). The sensitivity study demonstrated that the most important assumptions in the framework (aside from the San Francisco region-specific assumptions regarding geology) are the selection of the GMM, the uncertainty in the base aftershock rate, the magnitude to rupture length relationship, and the inclusion or removal of the host fault when calculating the steady-state contribution of the elevated hazard. Therefore, these parameters were included in a forward propagation of uncertainty. These case studies demonstrate the useful insights that are provided by the elevated collapse risk framework for risk-based decision-making to facilitate postearthquake recovery.
Supplemental Material
sj-pdf-1-eqs-10.1177_87552930231220549 – Supplemental material for Elevated collapse risk based on decaying aftershock hazard and damaged building fragilities
Supplemental material, sj-pdf-1-eqs-10.1177_87552930231220549 for Elevated collapse risk based on decaying aftershock hazard and damaged building fragilities by Anne M Hulsey, Francisco A Galvis, Jack W Baker and Gregory G Deierlein in Earthquake Spectra
Footnotes
Acknowledgements
The first author would like to thank Dr Ganyu Teng for a brief discussion that led to the idea of combining the steady-state and aftershock hazards into one “elevated” hazard. Two anonymous reviewers challenged the authors to test the sensitivity to the aftershock model assumptions, which prompted the sensitivity studies that are presented in the supplemental document and resulted in a stronger and more nuanced study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article. This project was funded by Stanford University, and a FEMA graduate fellowship (awarded through the Earthquake Engineering Research Institute).
Data and resources
A supplemental document is included with this publication. The following items can be found at: Hulsey, A., Galvis, F., Baker, J. W., Deierlein G. G. (2023) “Analysis scripts and data to reproduce paper figures,” in Elevated Collapse Risk Based on Decaying Aftershock Hazard and Damaged Building Fragilities. DesignSafe-CI. ![]()
Inputs for the case study including: an event catalogue for steady-state hazard, parameters for the aftershock environment, and damaged building fragility data for the 4-, 8-, 12-, and 20-story buildings. Jupyter notebooks written in python for calculating the elevated hazard, calculating the steady-state hazard, conducting the individual building case study, conducting a forward propagation of uncertainty, and conducting the parametric risk study.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.