
Abstract
This article examines the baseline resilience of reinforced concrete (RC) moment frame buildings conforming to the seismic design standards of Canada. Metrics for robustness, rapidity, and resilience are evaluated to capture the system’s reliability, speed of recovery, and socioeconomic impacts. Buildings of different heights are evaluated using nonlinear time-history analyses. Six damage states are defined as disjoint branches of an event tree depending on the building’s path to recovery. For a scenario earthquake of magnitude 7.3 magnitude at a distance of 30 km from Vancouver, the housing occupancy recovery trajectory is developed. Monte Carlo simulations are used to propagate uncertainty from seismic hazards to the building response to the lead time required for recovery. Buildings are found to maintain 50%–65% of their pre-event housing occupancy in the immediate aftermath. The housing occupancy is restored to 90% within 2–4 months, with a shorter recovery period for low-rise buildings, whereas the system resilience level requires 6 months to 1 year for restoration to 90%. Empirical data from the Loma Prieta (1989) and Northridge (1994) earthquakes are used to compare analytically predicted repair times. The findings from this article will facilitate the shift to resilience-based design in Canada.
Keywords
Introduction
With rapid industrialization and dense urban habitats, containing the loss of functionality and downtime in the post-earthquake scenario is becoming a desirable target for building design. Since the early 2000s, performance-based seismic design (PBSD) has emerged as an alternate design methodology to quantify and manage seismic risk (Cornell and Krawinkler, 2000; Cornell et al., 2002; Kiureghian, 2005; Krawinkler and Miranda, 2004; Moehle and Deierlein, 2004; Porter, 2003). The PBSD recognizes the probabilistic nature of seismic events and uncertainties associated with building behavior. This methodology has been instrumental in developing risk-based design standards, notably, the risk-targeted maps in ASCE 7 (2010) where a collapse risk of
A wide range of approaches have been considered to establish and compare seismic behavior of code-conforming buildings in the past, for example, observed damage-based fragility (Coburn and Spence, 2003), opinion-based fragility (Jaiswal et al., 2011), displacement-based design (Humar et al., 2011; Reza et al., 2014), performance-based evaluation (Al Mamun and Saatcioglu, 2017), collapse-based assessment (Goulet et al., 2007; Noh and Tesfamariam, 2018), energy-based risk evaluation (Tesfamariam and Goda, 2017). However, these studies do not consider the interactive response between a damaged building and its environment. The concepts of resilience for ecological systems, which are profoundly affected by external stimuli, were conceptualized in the 1970s (Holling, 1973). The interaction between natural disasters and infrastructures bears a striking similarity. For civil engineering systems, two aspects of resilience—(1) withstanding a perturbation and (2) recovering from it—lead to the intertwining of technical and social aspects. In structural and infrastructure engineering, Bruneau et al. (2003) formalized the concept of resilience by considering different dimensions of an event (technical, organizational, social, and economic), different performance measures of a system (robustness, rapidity, redundancy, and resourcefulness), and possible outcomes (increased reliability, faster recovery, and reduced socioeconomic consequences). Depending on the scale and facility of interest, some aspects of resilience can be more crucial than others in different time frames. For instance, in the aftermath of an earthquake, for crucial infrastructure, the focus in the short term is mainly on technical aspects, whereas in the long term, the interaction between different dimensions (e.g. organizational, economic, social) plays a crucial role in ensuring the functioning of the affected society (Cimellaro, 2013). In the present study, the reliability, speed of recovery, and socioeconomic impacts are captured using robustness, rapidity, and resilience metrics.
Figure 1 shows a schematic resilience triangle used to analytically transcribe the conceptual resilience framework (Bruneau et al., 2003). The system functionality is denoted by

(2) an approximate recovery path with its slope representing the rate of recovery

and (3) total recovery time

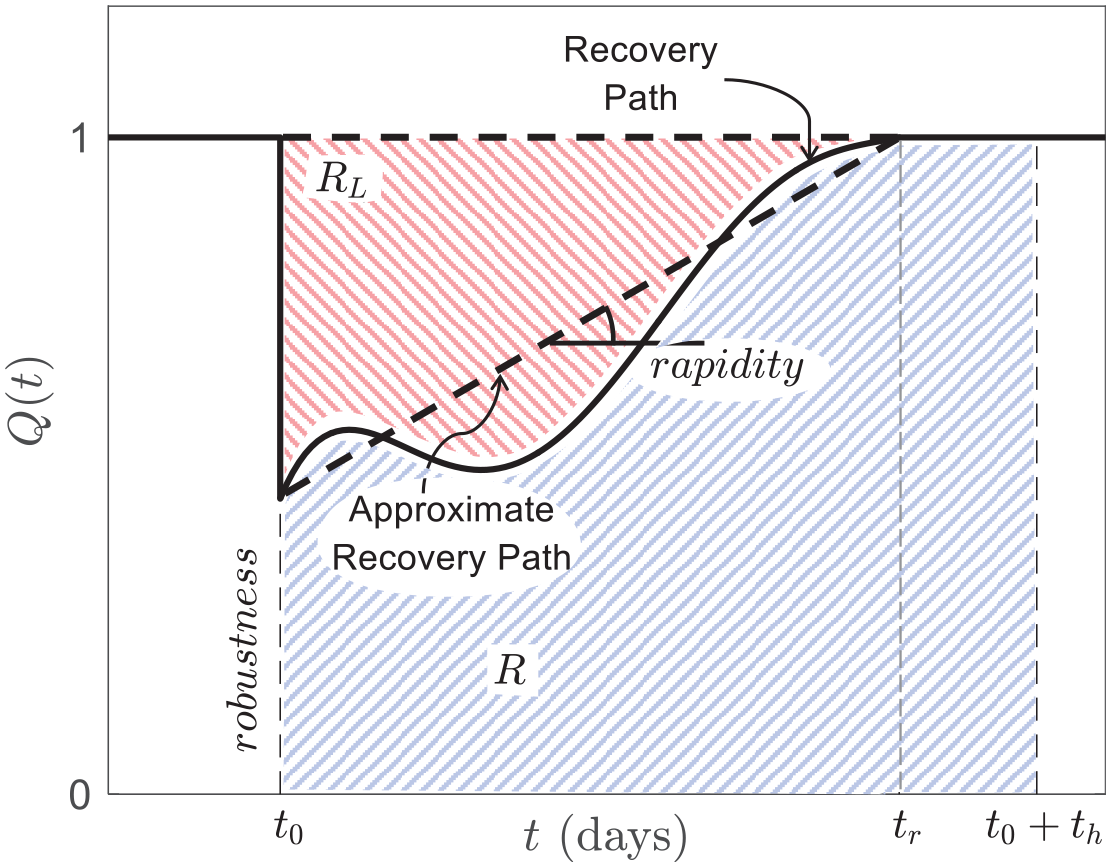
Schematic of a resilience triangle.
The value of

The length of time horizon
In this article, the resilience metrics of three representative reinforced concrete (RC) moment frame buildings conforming to Canadian codes (CSA A23:3, 2014; NBCC, 2015) are assessed. The buildings are selected to represent the seismic behavior of a class of buildings (D’Ayala et al., 2014; FEMA P695, 2009). These buildings are designed and detailed for the seismicity of Vancouver, British Columbia. Housing occupancy has been considered as the performance metric for post-earthquake recovery of buildings. Effects of building heights on the resilience metrics are studied using 3-, 6-, and 9-story buildings. The nonlinear analytical models of buildings are subjected to two sets of ground motion records (FEMA P695, 2009), far-field (FF) and near-field (NF), to capture the effects of pulse and directivity in time history. The probabilistic framework for resilience assessment is applied by defining appropriate functional states (Burton et al., 2016). These functional states split the building recovery process into disjoint branches depending on the activities required to restore the building’s housing occupancy. Furthermore, a scenario earthquake of magnitude 7.3 in the Strait of Georgia at a distance of 30 km from the site is simulated to assess the recovery trajectory of buildings. Recovery trajectory of buildings in terms of housing occupancy as a function of time after the scenario earthquake is developed. Monte Carlo simulations are used to propagate the uncertainty in the resilience metric, starting with the seismic hazard to the building behavior to the lead time required for building recovery. Finally, the time required for buildings to achieve different recovery targets is assessed.
Adopted seismic resilience framework
Burton et al. (2016) extended the concepts of PBSD to assess seismic resilience considering the probabilistic performance of buildings. They considered housing occupancy, the capacity of buildings in terms of occupants, as a system performance metric. Housing occupancy for a building can broadly take one of the three functional states—no occupancy (NOcc), loss of occupancy (OccLoss), or full occupancy (OccFull). In the post-earthquake scenario, a building can follow different recovery paths to attain the same functional state. For example, a building remains unoccupiable while an inspection is due or if it is irreparably damaged and requires demolition and replacement. A set of disjoint event tree-based recovery paths is defined to incorporate the effects of externalities and socioeconomic factors in the recovery estimation. Figure 2 shows the adopted procedure for seismic resilience. An event tree approach with disjoint branches is considered. Depending on the extent of damage to the building and post-earthquake recovery activities, each branch is associated with a discrete damage state,

where
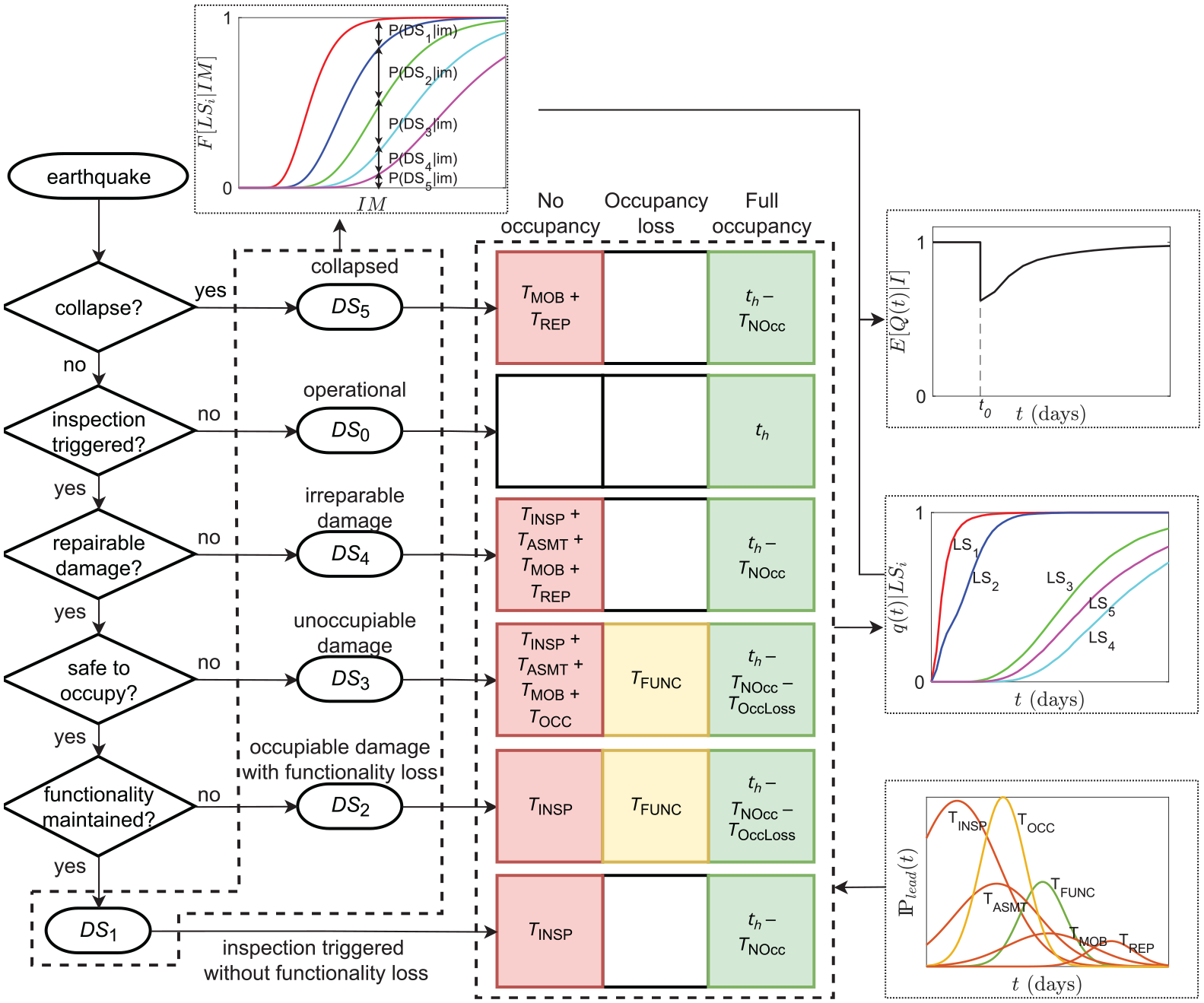
Procedure for probabilistic seismic resilience after an earthquake using an event tree approach.
Figure 2 shows a possible combination of necessary lead time components for each damage state. The time spent in NOcc and OccLoss are denoted by

where
Example RC buildings conforming to Canadian standards
In the present study, three building configurations with 3, 6, and 9 stories have been selected to obtain a baseline resilience of typical code-conforming ductile RC moment-resisting frame (MRF) buildings in Canada (Noh and Tesfamariam, 2018). Selected buildings are assumed to be located at a hypothetical site in Vancouver City Centre with coordinates
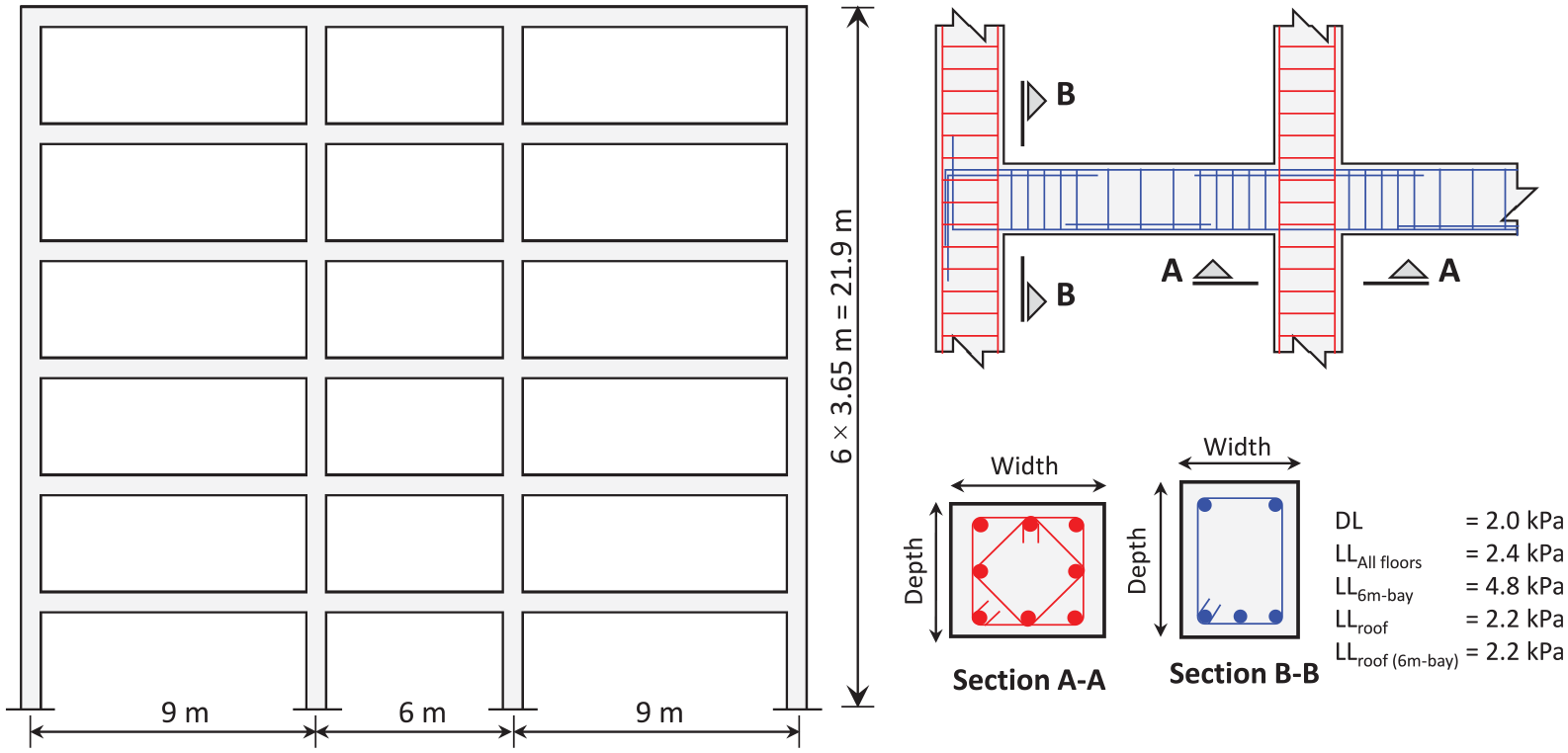
Details of the 6-story RC moment-resisting frame building under study (Noh and Tesfamariam, 2018).
The ductility and overstrength-related force modification factors are considered as
General building details for RC moment frame buildings
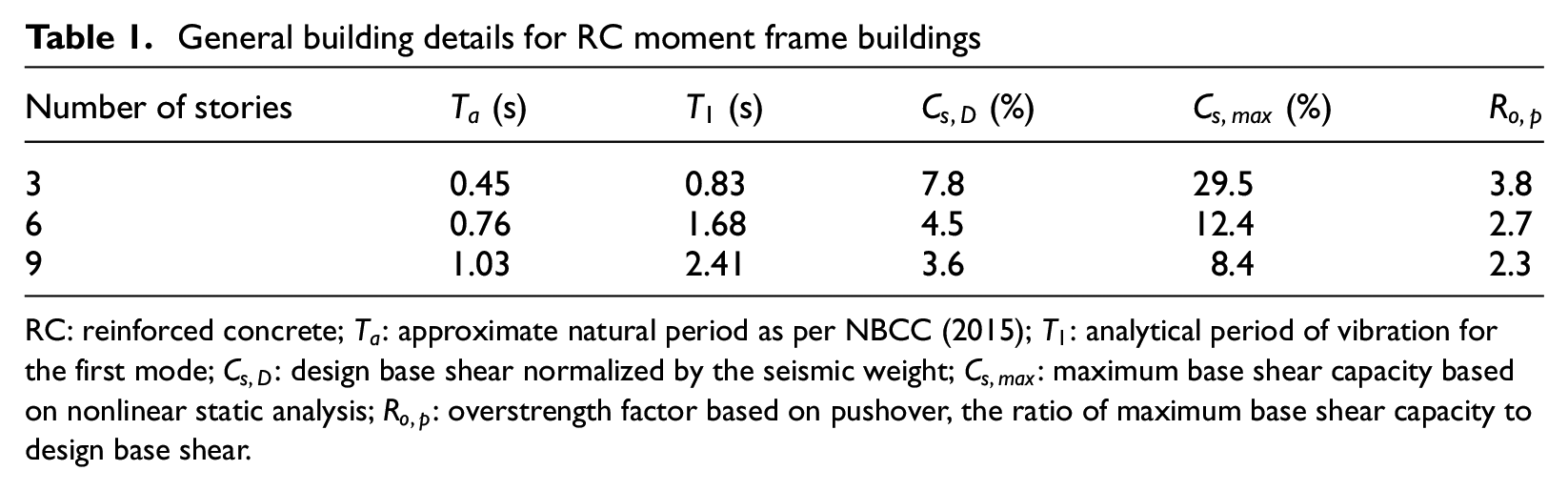
RC: reinforced concrete;
Nonlinear assessment model
A two-dimensional analytical model with concentrated plasticity is developed in OpenSees (McKenna et al., 2000) for numerical simulations. Due to the regularity of buildings, flexural hinges located on the beam–column joints have been considered to be sufficient for capturing nonlinear behavior. The effects of soil and foundation are accounted for using additional flexural hinges at the bottom. Their stiffness is approximated based on ASCE 41-17 (2017) for shallow foundations. Shear hinges are not modeled due to the capacity-based shear design of ductile RC columns per clause 21.3.2.7.1 of CSA A23:3 (2014). Several experimental (Ebrahimian et al., 2018; Jeong and Elnashai, 2004) and analytical studies (ATC 78-1, 2012; Badal and Sinha, 2022) support this modeling assumption by showing that the capacity-based shear design ensures a dominant flexural failure preceding the shear failure. The geometric nonlinearities (P-Δ effect) in columns are modeled using a leaning column that simulates additional gravity loads (Geschwindner, 2002). The backbone curve and hysteretic rules for frame members are defined following Ibarra–Medina–Krawinkler (IMK) model (Ibarra et al., 2005). The key parameters are determined using semi-empirical relations (Haselton et al., 2016; Panagiotakos and Fardis, 2001). These studies exploit a large available database of RC experiments (Berry et al., 2004). The yield moment and curvature are based on Panagiotakos and Fardis (2001), whereas the effective stiffness has been considered as secant stiffness to 40% of the yield value proposed by Haselton et al. (2016):

where

Similarly, the plastic rotation component to the capping rotation
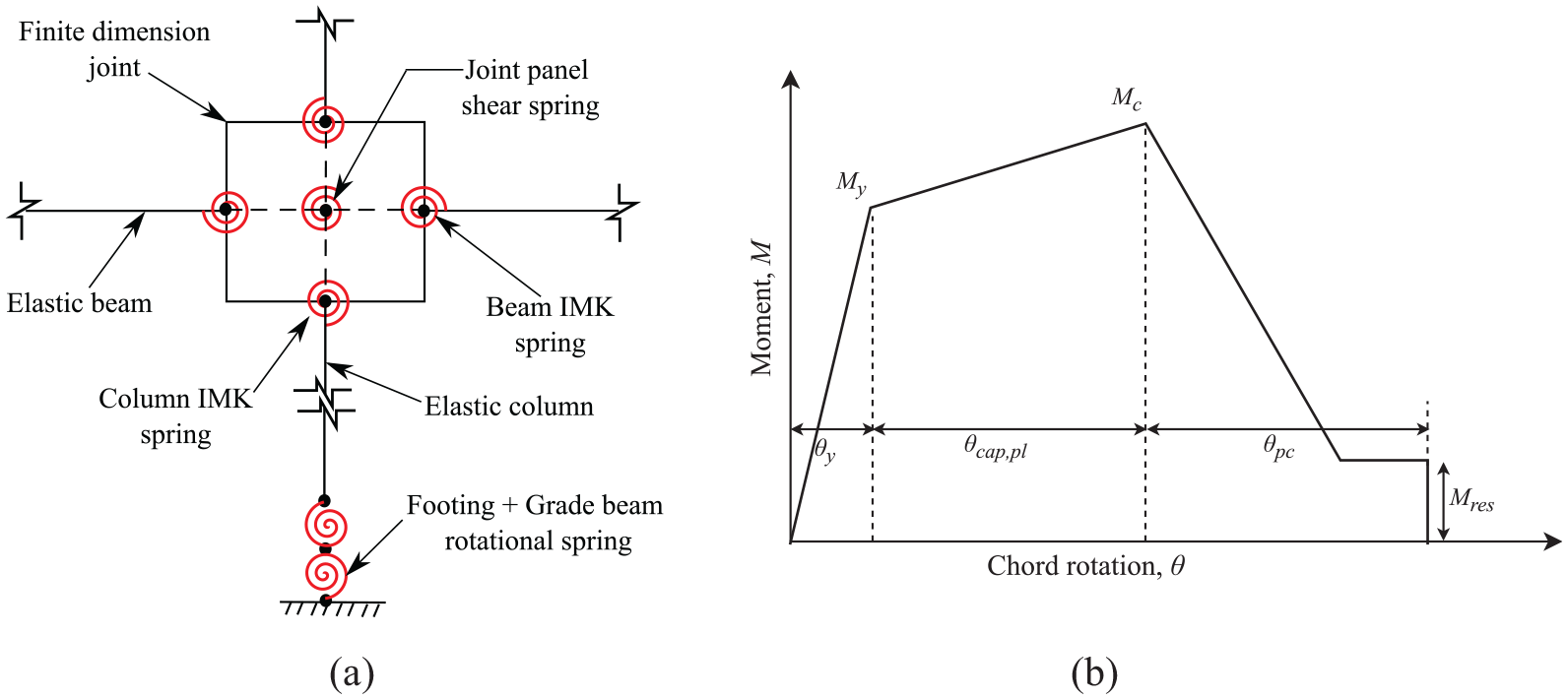
Schematic details of the nonlinear analytical model for ductile RC frames: (a) the sub-assemblage (Badal and Sinha, 2022) and (b) a typical backbone curve (Ibarra et al., 2005).
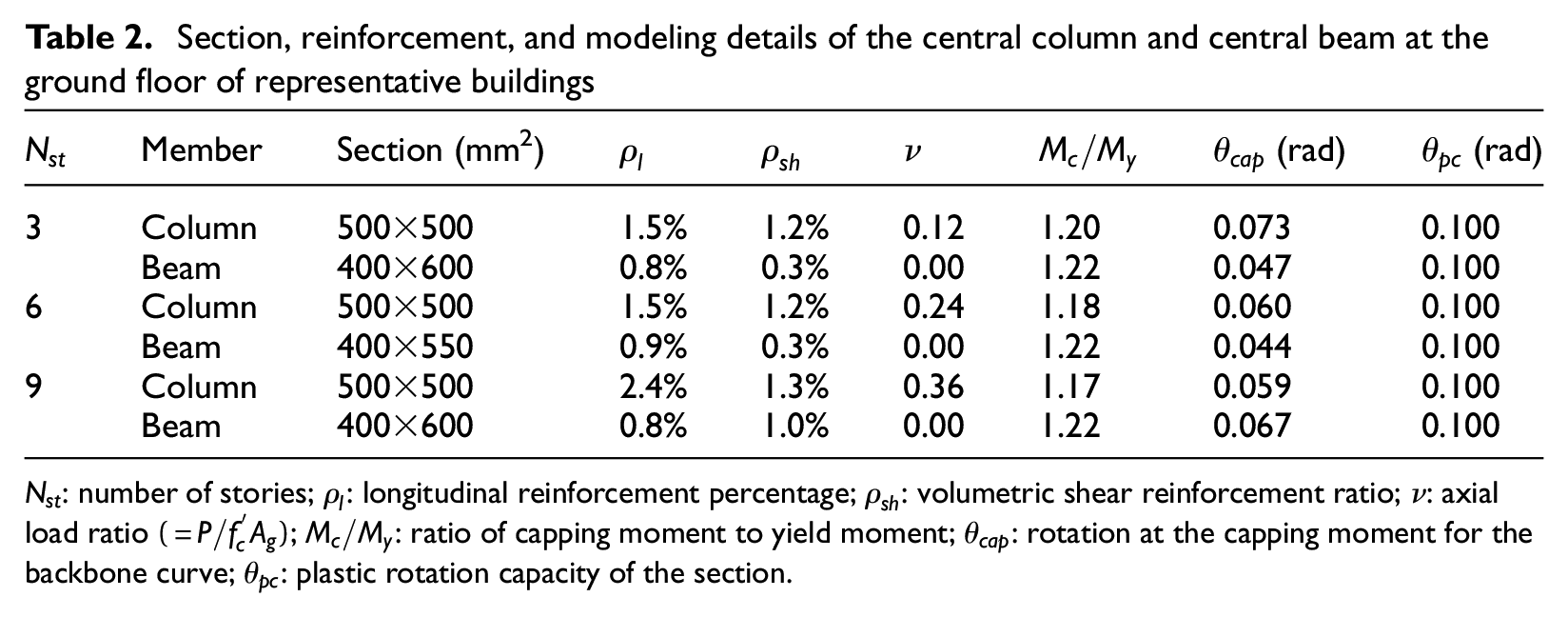
Section, reinforcement, and modeling details of the central column and central beam at the ground floor of representative buildings
Fragility analysis
For a given building, fragility function
Figure 5a shows hazard curves for spectral acceleration at natural period of each building based on draft NBCC (2020) seismic hazard maps (Kolaj et al., 2020) for Vancouver (
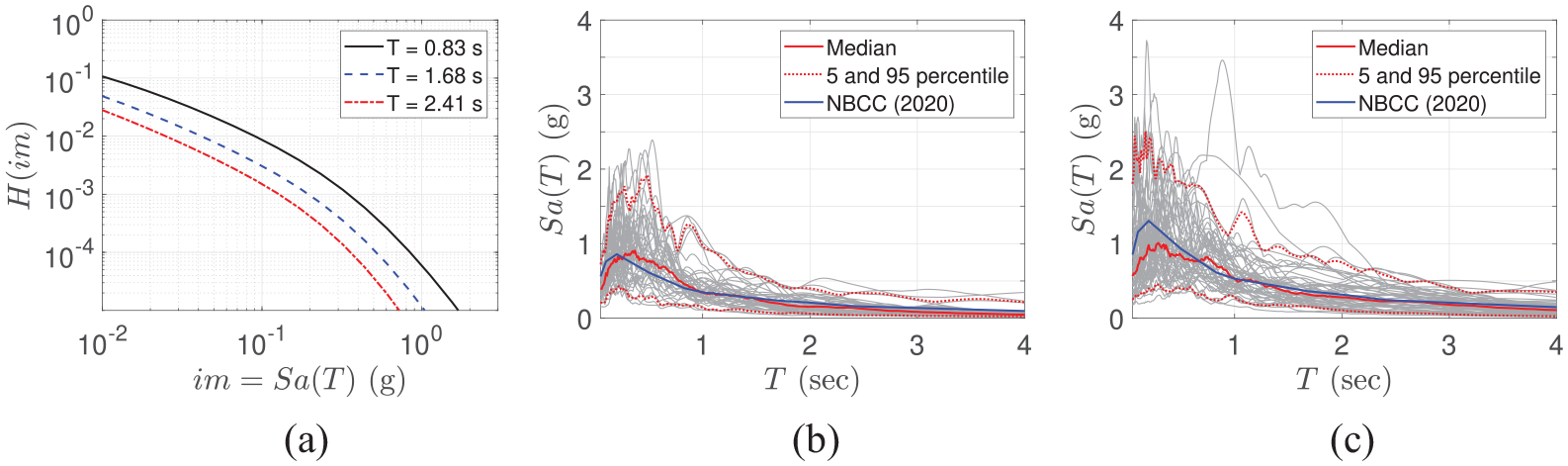
(a) Seismic hazard of Vancouver site as per proposed seismic maps of NBCC (2020), (b) 22 pairs of far-field, and (c) 28 pairs of near-field ground motion records (FEMA P695, 2009). Solid blue lines represent Vancouver’s response spectrum per NBCC (2020). To compare the spectral shape of records, the site’s
Figure 6 shows IDA curves for 3-story buildings for both ground motion sets. A larger dispersion in the building capacity for a higher drift ratio is noted in the case of the NF records than in the FF records. The
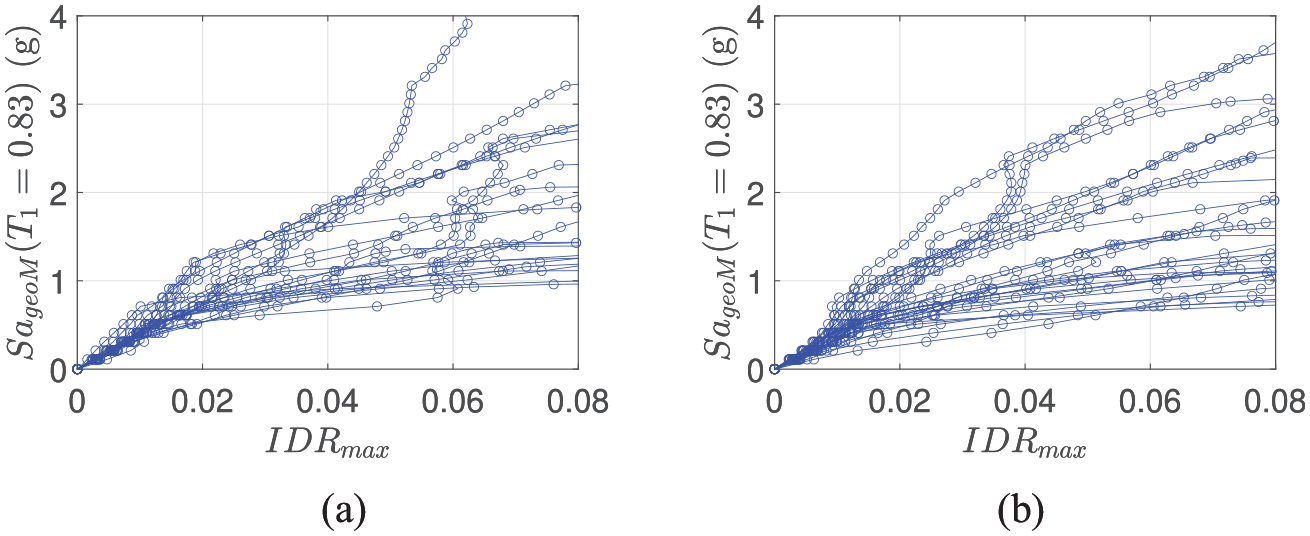
IDA curves of 3-story building for controlling components of (a) far-field and (b) near-field ground motion records.
Figure 7 shows the fragility of all buildings using FF and NF records with
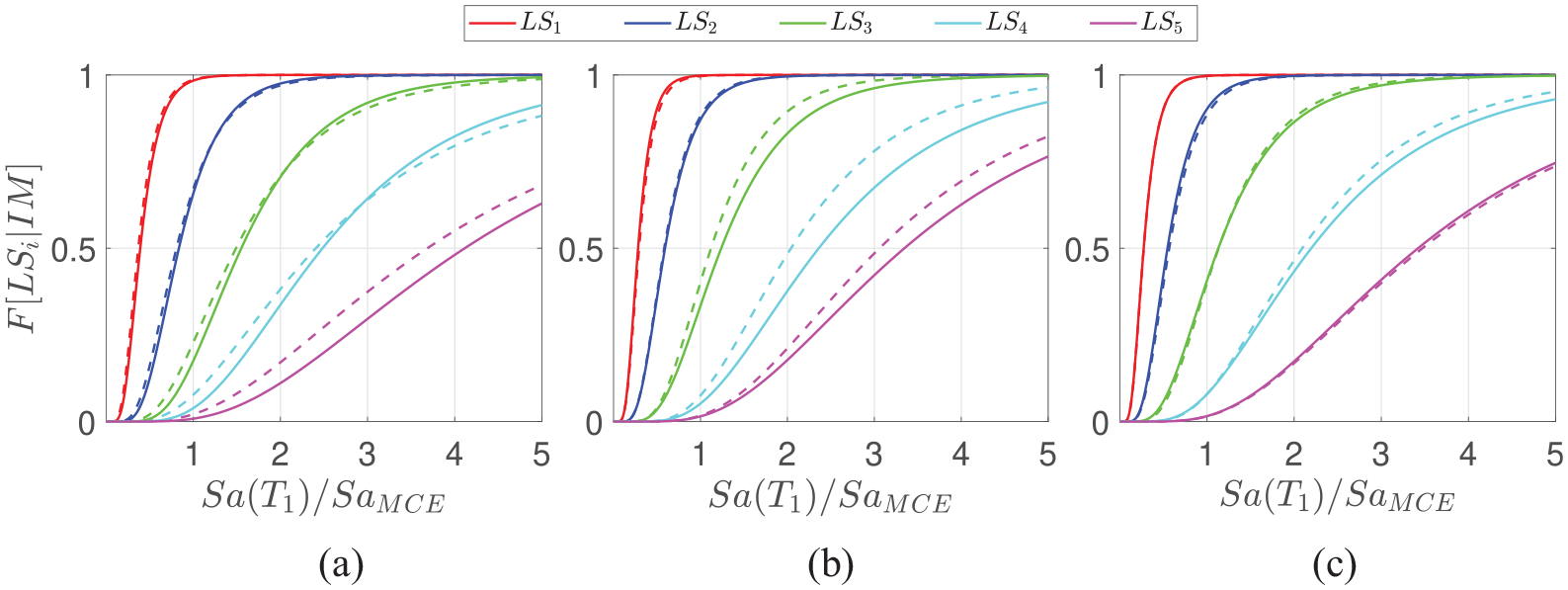
Fragility functions for (a) 3-story, (b) 6-story, and (c) 9-story buildings for far-field (FF) and near-field (NF) ground motion suites. Solid and dashed lines correspond to the fragility function using FF and NF ground motions, respectively. The fragility functions are plotted only with
The median and record-to-record uncertainty parameters for the fragility functions are listed in Table 3. Median capacity
Fragility function parameters for RC moment frame buildings for different limit states
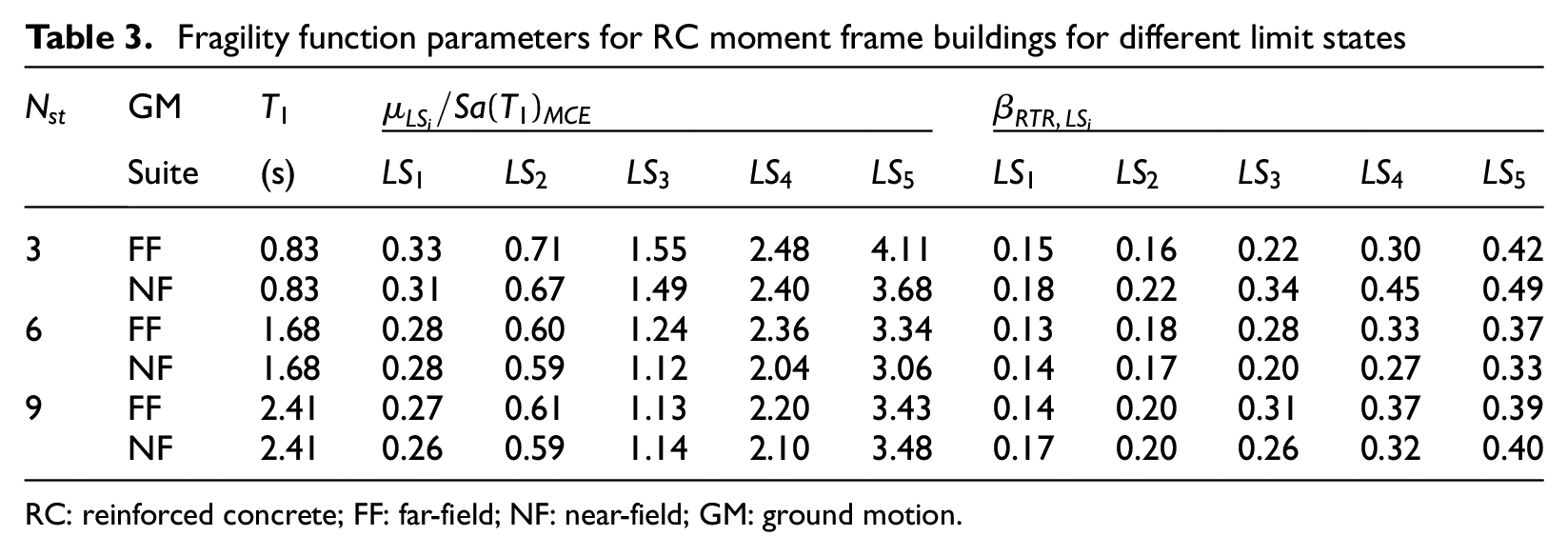
RC: reinforced concrete; FF: far-field; NF: near-field; GM: ground motion.
Seismic damages to nonstructural components of a building can lead to significant economic losses and downtime (Liel and Deierlein, 2013; Porter et al., 2001). Observations from past earthquakes substantiate these findings (Ding et al., 1990; McKevitt et al., 1995). A nonstructural component is typically classified as either drift-sensitive (interstory drift ratio,
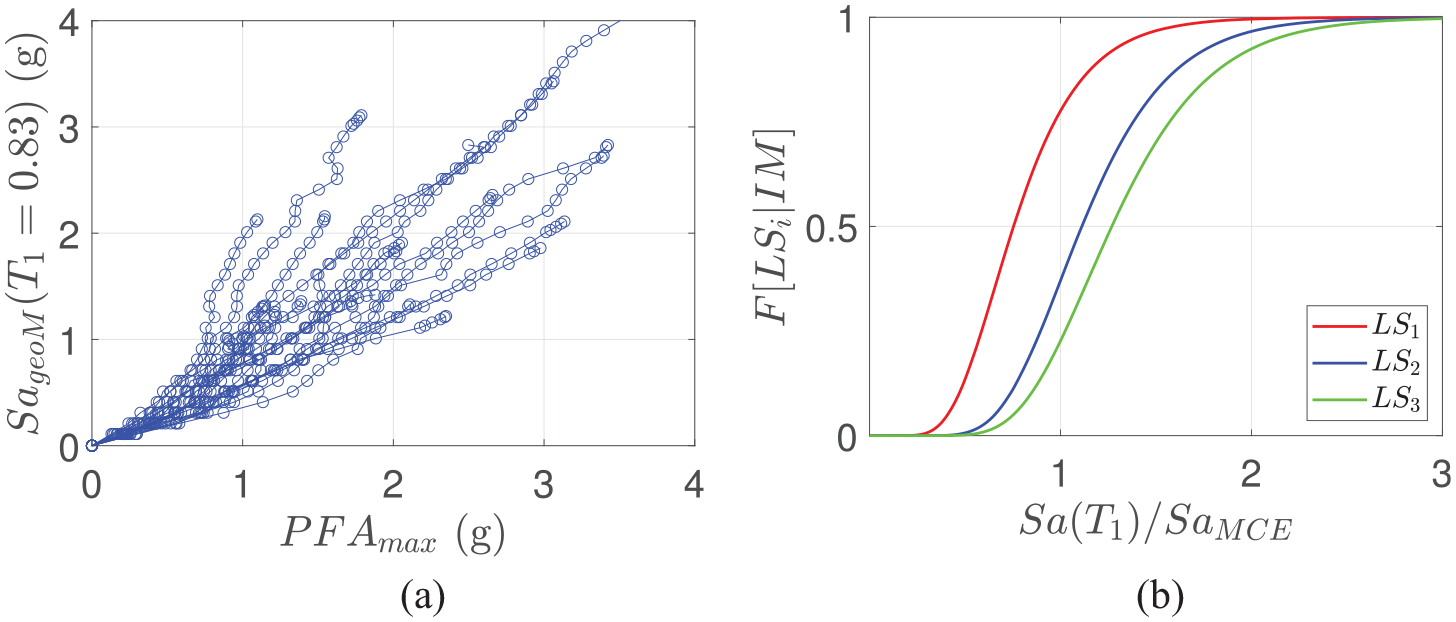
For the 3-story building, (a) IDA curves for peak floor acceleration PFA and (b) fragility functions using FF ground motions for suspended ceilings.
Fragility function parameters for nonstructural components of RC moment frame buildings for different limit states corresponding to far-field ground motion set
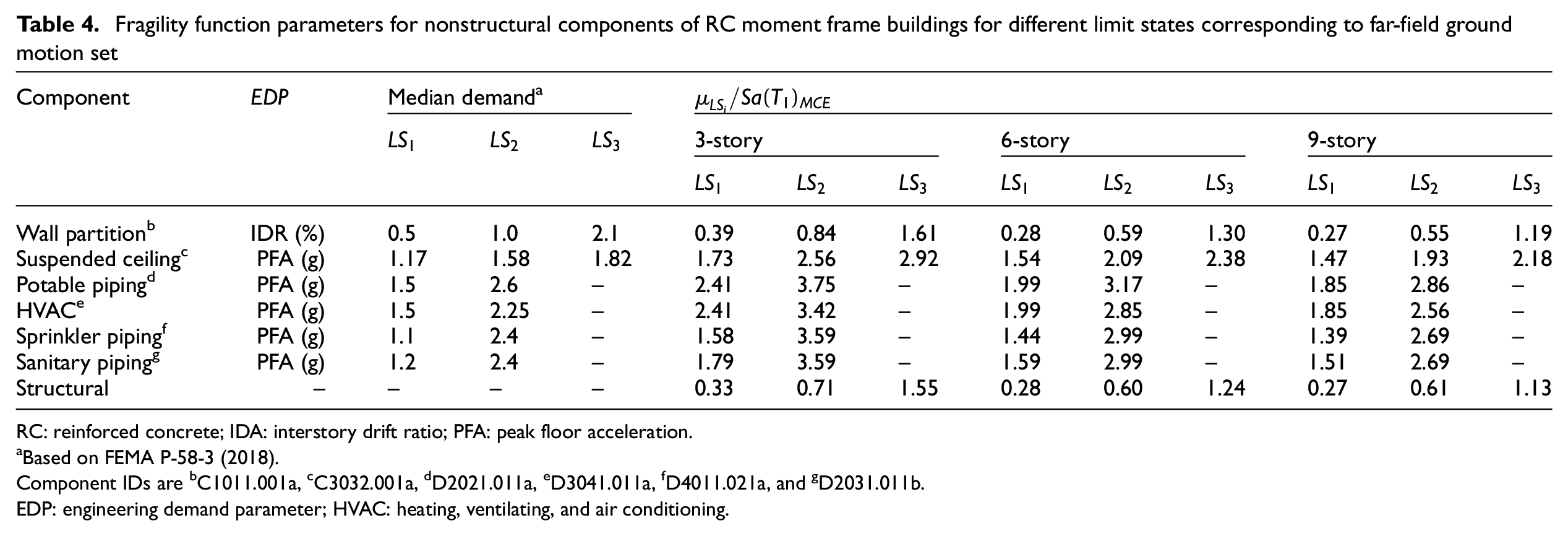
RC: reinforced concrete; IDA: interstory drift ratio; PFA: peak floor acceleration.
Based on FEMA P-58-3 (2018).
Component IDs are bC1011.001a, cC3032.001a, dD2021.011a, eD3041.011a, fD4011.021a, and gD2031.011b.EDP: engineering demand parameter; HVAC: heating, ventilating, and air conditioning.
Housing occupancy
Normalized housing occupancy is taken as the system performance metric in the present study. It is defined as the ratio of absolute housing occupancy to pre-earthquake housing capacity. In the probabilistic framework, recovery curves of buildings provide the mean system performance as a function of the time after the earthquake. Table 5 shows the lead time distribution for different recovery activities of the 6-story building based on Burton et al. (2016). The lead time for each activity is modeled as a lognormal random variable with parameters as given in Table 5. The times required for mitigation activities are estimated based on the sequence of repairs. The statistical distributions of lead times consider structural as well as nonstructural damages. This captures the effects of losses to nonstructural members. For example, the lead time required for mobilizing,
Lead time distribution used for assessment of repair time for the 6-story RC building
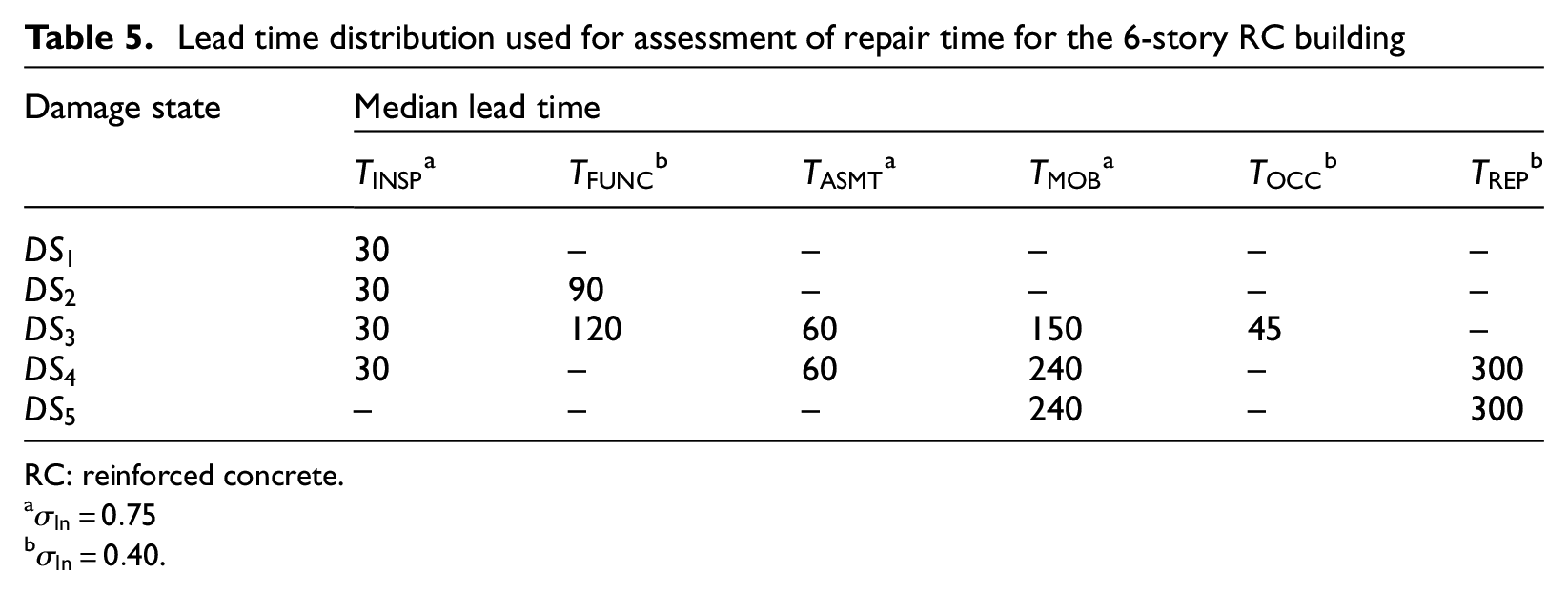
RC: reinforced concrete.
Mean repair time
The mean repair time is the time required for the building to become fully occupiable after the inspection, assessment, and mobilization for the construction are complete. In practice, the time required before mobilization can be extraneously long (or, short) on account of safety cordons from nearby buildings, prioritization, or other owner-specific reasons. Hence, we present the mean repair time as a useful measure of the recovery process in the present section. For the normalized housing occupancy (in the following section), this effect is captured through a higher uncertainty associated with the distribution of

where
Housing occupancy for damaged buildings
Figure 9 shows the conditional housing occupancy
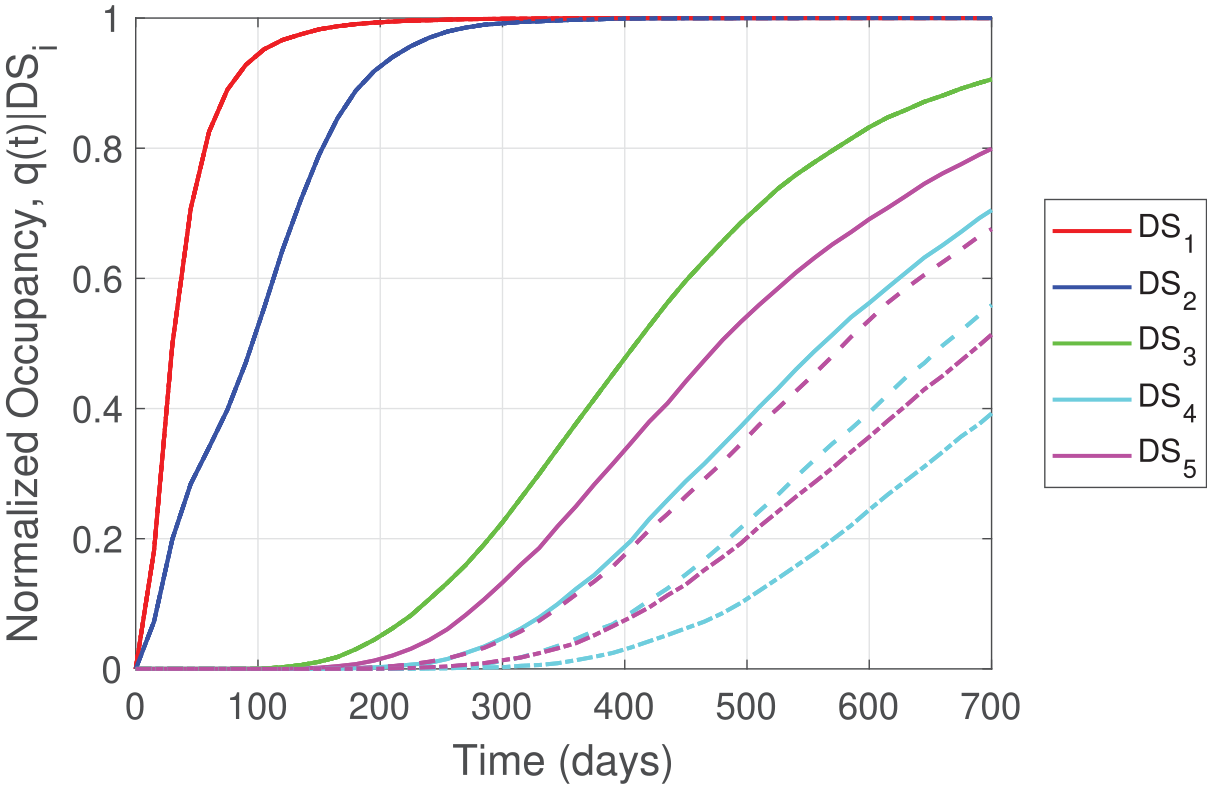
Distribution of normalized housing occupancy for different damage state as a function of time for 3-, 6-, and 9-story buildings. For damage states
Resilience of RC moment frame buildings for a scenario earthquake
Based on the historical seismicity of Vancouver, a 7.3 magnitude earthquake in the Strait of Georgia was characterized by Cassidy et al. (2000). This scenario was also considered by the City of Vancouver (2013) for earthquake preparedness and by Costa et al. (2022) for estimating population displacement. Thus, in the present section, resilience metrics of example RC frame buildings are assessed for the scenario earthquake of
Housing recovery trajectory
The scenario earthquake was simulated using the ground motion model proposed by Boore et al. (2014) for shallow crustal earthquakes. This ground motion model has also been used in the latest seismic hazard model of Canada (Kolaj et al., 2020). For a fixed magnitude–distance tuple, the uncertainty in the system performance metric propagates from the hazard (intensity measure distribution; captured using ground motion models) to the building fragility to the lead times for various recovery activities. In the present study, Monte Carlo simulations with 10,000 realizations are used to propagate the uncertainty. The total aleatory uncertainty function, representing the combination of between-event variability and within-event variability, is used for the simulations. For each realization, the housing occupancy following an earthquake is estimated using the building’s structural damage states (with different probabilities of being in damage states
Figure 10a shows the recovery trajectory for each building for normalized housing occupancy after the scenario earthquake. The figure shows the trajectory using both ground motion sets. The effect of two ground motion sets on the recovery path is minuscule. This is contrasted against the significantly different conditional probabilities of irreparable damage in the case of MCE-level events. It is observed from the figure that 9-story building experiences higher post-earthquake damages (less robust) and has a longer recovery period (reduced rapidity). It is anticipated that the 9-story building also has a higher loss of resilience over the time horizon. Furthermore, Figure 10b shows the uncertainty in the recovery trajectory. The standard deviation varies between 0.10 and 0.35 with higher uncertainties in the aftermath of the earthquake. The uncertainty reduces with the reduction in the burden of restoration activities.
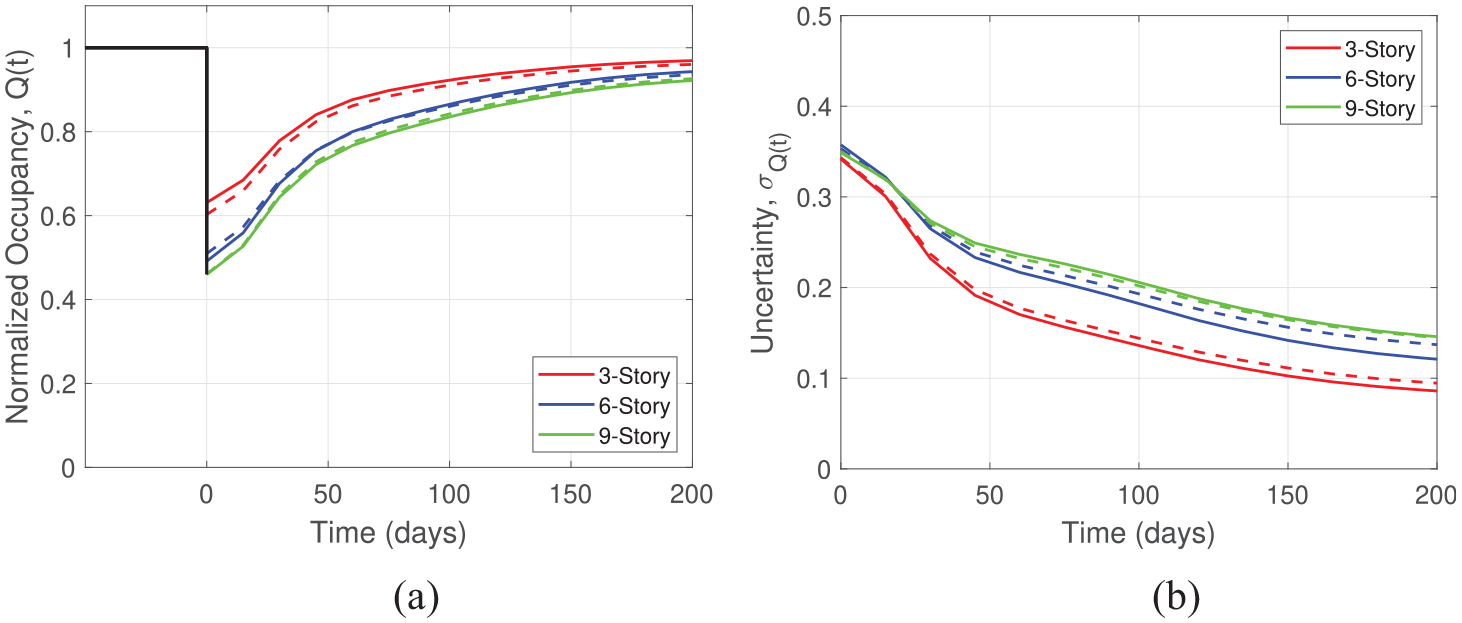
Housing recovery functions for Vancouver for a scenario earthquake of magnitude,
Resilience metrics and recovery targets
Table 6 shows three resilience metrics for example buildings. The 3-story building is more robust than the 6- and 9-story buildings. In the aftermath of the scenario earthquake, the housing occupancy of the 3-story example building is reduced by an average of 35%, whereas the housing occupancy of 6- and 9-story buildings is reduced by ~ 50%. The shape of the recovery path is closer to exponential as the relative rapidity reduces with time. This validates the assumptions made in other studies (e.g. Tirca et al., 2016). The rapidity is noted to be higher for taller buildings. This is attributed to the high levels of damage experienced by these buildings and hence, increased levels of recovery activities. The total resilience of buildings with housing occupancy as the system performance metric is shown in the last three columns of the table. The time horizon
Robustness, rapidity, and resilience for the housing capacity in case of a scenario earthquake of magnitude,
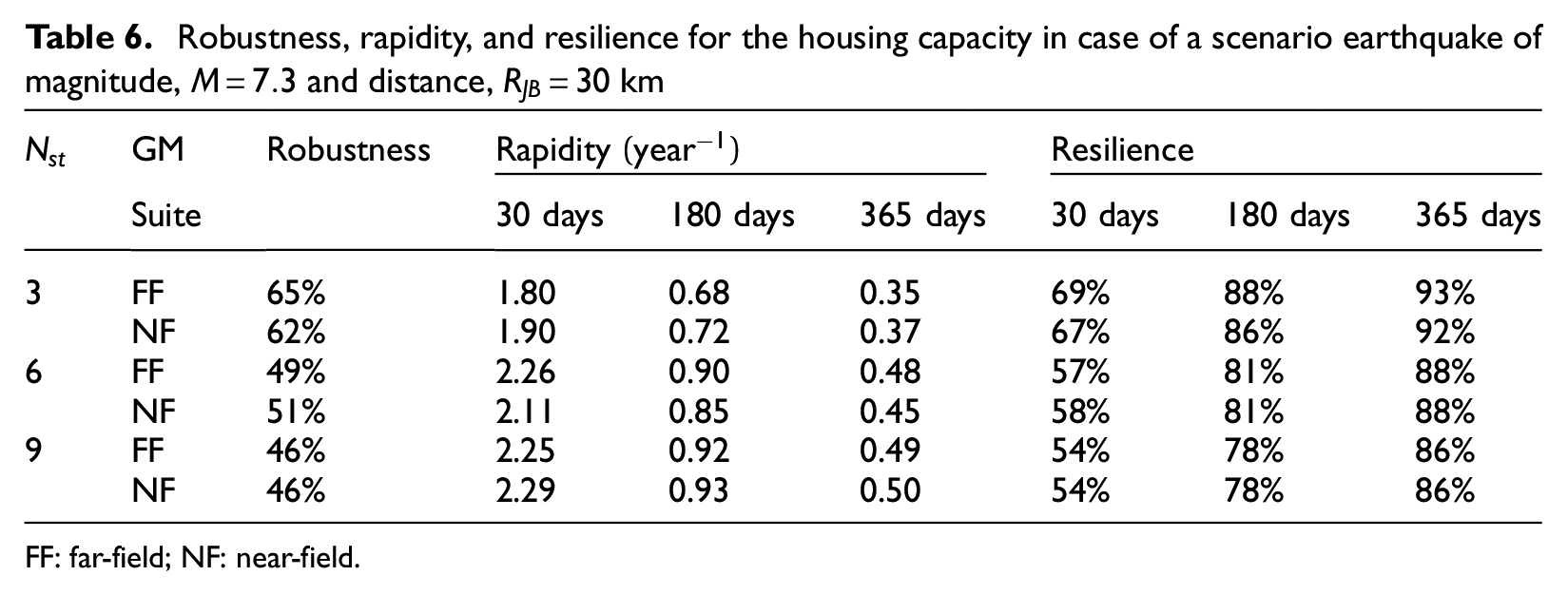
FF: far-field; NF: near-field.
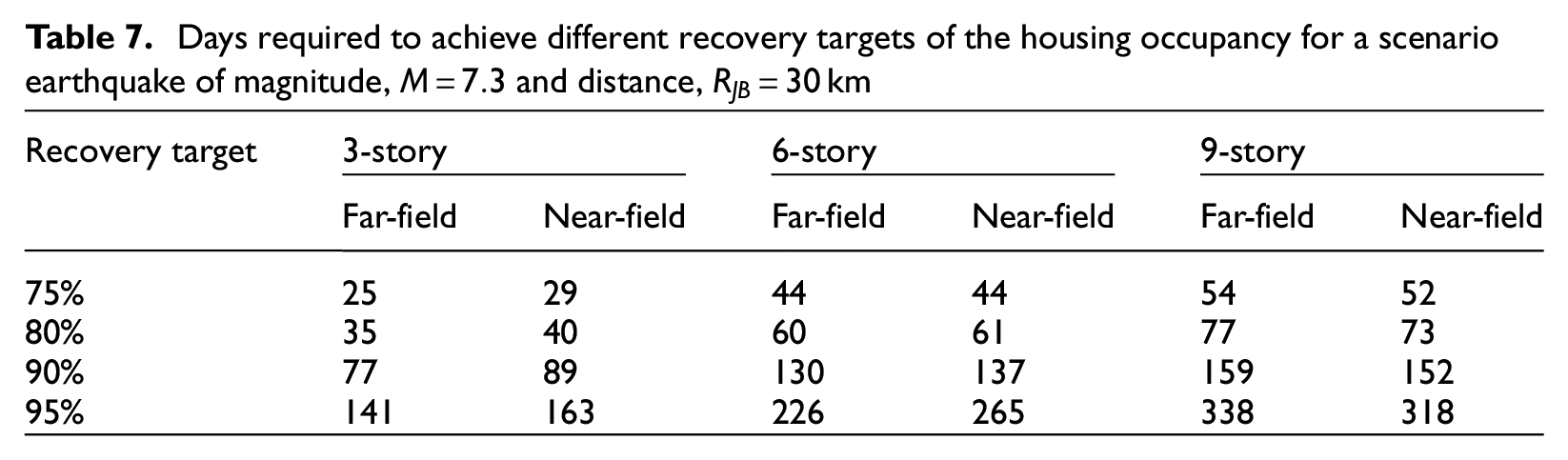
The recovery of a system represents its performance at a specified point in time, whereas its resilience represents the accumulated loss of performance over the time horizon. Table 7 shows the number of days required to meet different recovery targets. It is noted that for the scenario earthquake of 7.3 magnitude at a distance of 30 km, 90% of recovery in the housing capacity is attained within 3–5 months by all buildings. However, as noted earlier, it takes much longer (6 months to 1 year) for the building to achieve similar levels of resiliency.
Days required to achieve different recovery targets of the housing occupancy for a scenario earthquake of magnitude,
Comparison with field observations
In this section, we compare the analytically obtained repair time with the empirical field observations. Although the database used for the comparison is taken from American buildings, they provide insight into the estimated and observed repair times. For two major earthquakes on the North American pacific coast, 6.9 magnitude Loma Prieta (1989) and 6.7 magnitude Northridge (1994), extensive reconnaissance studies have been undertaken to assess economic losses and building damages (Eguchi et al., 1998; Kroll et al., 1991). However, limited empirical data on the recovery time and functionality restoration exist in the literature. Comerio and Blecher (2010) examined 4937 buildings tagged with red and yellow after the two earthquakes for their repair and re-occupancy time. The mean time to occupancy for multi-family buildings (considered suitable for comparison with 3- to 9-story buildings considered in the present study) after the Loma Prieta (1989) earthquake in Hollister, at
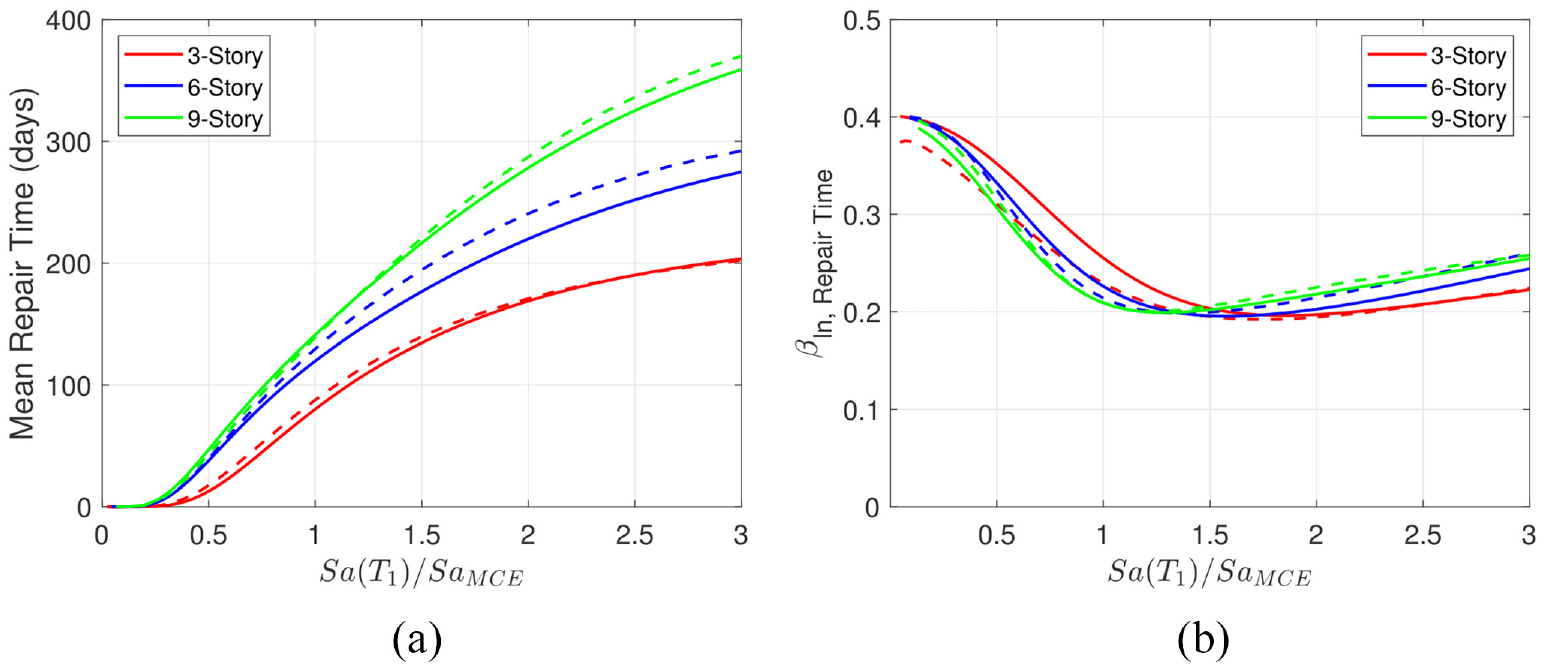
(a) Mean repair time as a function of normalized intensity measure for each building assessed for FF (far-field) and NF (near-field) ground motion suite, (b) logarithmic uncertainty in the repair time. Solid and dashed lines correspond to the mean and uncertainty assessed using FF and NF ground motions, respectively.
Summary and conclusion
Seismic design standards and the research community are gradually moving toward a performance-based design. Such methodology allows the design of buildings to meet specified levels of decision variables such as collapse, injury, dollar loss, or casualty. However, the variation of system performance (such as occupancy or functionality loss) over time in the aftermath of an event remains unknown. Various stakeholder groups like governments, housing communities, and owners can benefit from the information on the recovery and resilience of buildings to choose suitable design goals.
The present study evaluated the seismic resilience of ductile RC moment frame buildings conforming to Canadian seismic design and detailing standards (CSA A23:3, 2014; NBCC, 2015). Different resilience metrics for robustness, rapidity, and resilience are examined against a disruptive event. These metrics capture system’s reliability, speed of recovery, and socioeconomic impacts, respectively. Three representative buildings of 3-, 6-, and 9-stories in height are selected to assess the baseline resilience of code-conforming RC moment frames. Housing occupancy as a fraction of pre-earthquake occupancy has been considered as the system performance metric. Nonlinear time-history analyses are performed by subjecting buildings to two ground motion sets. Due to proximity to the active faults, NF effects are captured using the NF ground motion set. Damage states are defined for each event branch depending on the need for different activities such as inspection, detailed assessment, mobilization for construction, occupancy restoration, functionality restoration, and replacement. The distributions of normalized housing occupancy for each damage state as a time function are developed.
An earthquake of magnitude 7.3 in the Strait of Georgia at a distance of 30 km from the site is simulated to assess the recovery trajectory of buildings. The study uses the event tree approach to present the mean recovery path of the normalized housing occupancy following the simulated earthquake event. Large levels of uncertainty in the resilience metric exist even for a fixed magnitude–distance tuple. This uncertainty has been propagated from the hazard to the building fragility to the lead times for various recovery activities using Monte Carlo simulations. The resulting mean recovery path of each building represents the probabilistic trajectory of the housing occupancy in the scenario earthquake. Finally, the time required to achieve different recovery targets is estimated.
The following main conclusions are drawn from the study:
The mean repair time required to complete inspection, assessment, and mobilization for construction, for a 3-story RC moment frame building is lower than that for 6- and 9-story buildings. However, for an MCE-level event, the mean repair time of 3–4 months is comparable for all three buildings.
The effect of NF ground motion is pronounced in the low-rise buildings compared with taller buildings. The probability of irreparable damage conditional on an MCE-level event for the 3-story building is 3.9% for the FF ground motion set, whereas it increases to 7.7% for the NF ground motion set.
The normalized housing occupancy for different damage states as a function of time is developed for all buildings. These results, along with a suitable ground motion model, can be used to obtain a recovery trajectory for any scenario earthquake.
In the aftermath of a scenario earthquake of 7.3 magnitude at 30 km distance from the example site, the 3-story building is found to be ~ 65% robust, whereas taller buildings are ~ 50% robust.
For the scenario earthquake, 90% of housing recovery is attained within 3–5 months by all buildings, with taller buildings recovering slower than shorter ones. However, it takes much longer (6 months to a year) for system resilience to achieve similar levels across the time horizon.
Field observations from two similar earthquakes on the North American pacific coast, Loma Prieta (1989) and Northridge (1994), indicate that the recovery time for the special RC moment frame considered in the present study is lower than empirically observed data from these well-recorded past earthquakes.
Socioeconomic factors, including the location of the building, can affect different lead times significantly. In the aftermath of an earthquake, an imbalance in demand-supply for construction-related activities can decelerate the recovery. On the contrary, government intervention can alleviate some of the burdens. Appropriate adjustments for such factors can be made by amplifying or reducing the lead times based on real-life evidence. The present study made several assumptions to obtain a benchmark resilience of representative ductile RC moment frame buildings conforming to Canadian codes. Resilience assessment can be further improved by accurate assessment of the damage states and lead time distributions. At the same time, due to the large inherent uncertainty in the ground motion, building behavior, and repair activities, while releasing these assumptions will result in a fine-grained resilience estimate, it is not anticipated to deviate largely from the current estimate. In addition, the validity of assumptions is tested by comparing the obtained mean repair time estimates from field observations.
Findings from the present study can be extended to estimate the demand for temporary shelters and disaster relief activities. The derived housing recovery function can further be integrated to estimate the overall loss in terms of person-days. Following the approach in the present study, robustness and resilience targets can be specified for the design of the new buildings or rehabilitation of the old ones. As also proposed in the literature (Ademovic and Ibrahimbegovic, 2020; Cimellaro, 2013; Fung et al., 2022), this shift from performance-based design to resilience-based design rooted in social metrics like occupancy, downtime, and so on, will equip decision-makers and communities to understand their risk better and eventually become more resilient.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the British Columbia Forestry Innovation Investment’s (FII) Wood First Program, Natural Science Engineering Research Council of Canada (NSERC) Alliance, and NSERC Discovery Grant (RGPIN-2019-05013).