Building on the analysis of Bonanno G. Artificial Intelligence 339 we introduce a simple modal logic containing three modal operators: a unimodal belief operator , a bimodal conditional operator > and the unimodal global operator . For each AGM axiom for belief revision, we provide a corresponding modal axiom. The correspondence is as follows: each AGM axiom is characterized by a property of the Kripke–Lewis frames considered in Bonanno G. Artificial Intelligence 339 and, in turn, that property characterizes the corresponding modal axiom.
The notions of belief and of belief revision have been studied extensively in the literature, although following different approaches.
Starting with Hintikka’s (Hintikka, 1962) seminal contribution, the notion of belief has been studied mainly within the context of modal logic. On the syntactic side a belief operator is introduced, with the intended interpretation of as ‘‘the agent believes .’’ Properties of beliefs are then expressed by means of axioms, such as the positive introspection axiom , which says that if the agent believes then she believes that she believes . On the semantic side Kripke structures (Kripke, 1963) are used, consisting of a set of states together with a binary relation on , with the interpretation of as ‘‘at state the individual considers state doxastically possible.’’ The connection between syntax and semantics is then obtained by means of a valuation which associates with every atomic sentence the set of states where is true. The pair is called a frame and the addition of a valuation to a frame yields a model. Rules are given for determining the truth of an arbitrary formula at every state of a model; in particular, the formula is true at state if and only if is true at every state such that . A property of the accessibility relation is said to correspond to an axiom if every instance of the axiom is true at every state of every model based on a frame that satisfies the property and vice versa. For example, the positive introspection axiom corresponds to transitivity of the relation .
On the other hand, the theory of belief revision, known as the AGM theory due to the seminal work of Alchourrón et al. (1985), has followed a different path. In this literature initial beliefs are modeled as a set of formulas in a propositional (modal-free) language and belief revision is modeled as a function that takes as input a Boolean formula (thought of as new information) and gives as output a new set of formulas interpreted as the revised beliefs. Properties of belief revision are expressed as properties of this function.
Several attempts have been made to bring the theory of belief revision within the umbrella of modal logic. Various modal languages have been proposed: some making use of conditionals (Boutilier, 1994; Giordano et al., 1998, 2001, 2005; Günther & Sisti, 2022), some employing belief, information and branching-time operators (Bonanno, 2007, 2012), some based on a revision operator and either a plausibility operator (Segerberg, 1998) or a conditional operator (Fuhrmann, 1991), some making use of knowledge, plausibility and time operators (Friedman & Halpern, 1997). Although all these papers aimed at formulating modal languages that captured the principles of AGM belief revision, none of them established a clear correspondence between the AGM axioms and modal axioms.
In this paper we provide a more systematic and principled integration of AGM belief revision into the apparatus of modal logic, thus unifying the theories of belief and belief revision under a common approach. We make use of the semantics introduced in Bonanno (2025)—based on frames consisting of a set of states, a Kripke belief relation and a Lewis selection function—to establish a precise correspondence between each AGM axiom and a modal axiom in a logic that contains three modal operators: a unimodal belief operator , a bimodal conditional operator > and the unimodal global operator . The interpretation of is ‘‘the agent believes ,’’ the interpretation of is ‘‘if is (or were) the case then is (or would be) the case’’ and the interpretation of is ‘‘ is necessarily true.’’ Adding a valuation to a frame yields a model. Given a model and a state , we identify the initial belief set with the set of formulas that are believed at state (i.e., ) and we identify the revised belief set (prompted by the input represented by formula ) as the set of formulas that are the consequent of conditionals that (1) are believed at state and (2) have as antecedent (i.e., ). For each AGM axiom we provide a corresponding property of the Kripke–Lewis frames and identify an axiom in the modal language that, in turn, corresponds to that property, thereby providing a translation of each AGM axiom for belief revision into an axiom in the modal language.
The next section briefly reviews the AGM axioms for belief revision and the semantics put forward in Bonanno (2025), while Section 3 introduces the modal logic and provides axioms in that logic that correspond to the semantic properties that characterize the AGM axioms. Section 4 concludes. The longer proofs are relegated to the Appendix.
AGM Axioms and Their Semantic Characterization
We consider a propositional logic based on a countable set At of atomic formulas. We denote by the set of Boolean formulas constructed from At as follows: and if then and belong to . Define , , and in terms of and in the usual way (e.g. is a shorthand for ).
Given a subset of , its deductive closure is defined as follows: if and only if there exist (with ) such that is a tautology. A set is consistent if ; it is deductively closed if . Given a set and a formula , the expansion of by , denoted by , is defined as follows: .
Let be a consistent and deductively closed set representing the agent’s initial beliefs and let be a set of formulas representing possible informational inputs. A belief change function based on and is a function ( denotes the set of subsets of ) that associates with every formula a set , interpreted as the change in prompted by the input . We follow the common practice of writing instead of which has the advantage of making it clear that the belief change function refers to a given, fixed, . If then is called a partial belief change function, while if then is called a full-domain belief change function.
Let be a partial belief change function (thus ) and a full-domain belief change function. We say that is an extension of if coincides with on the domain of , that is, if, for every , .
AGM Axioms
The following postulates for belief revision were proposed by Alchourrón, Gärdenfors and Makinson in Alchourrón et al. (1985) and are known as the AGM axioms.
A belief revision function, based on the consistent and deductively closed set (representing the initial beliefs), is a full domain belief change function that satisfies the following axioms: ,
.
.
.
.
.
.
is interpreted as the revised belief set in response to the input represented by formula . For a discussion of the above axioms see, for example, Fermé and Hansson (2018) and Gärdenfors (1988).
Kripke–Lewis Semantics
A Kripke–Lewis frame is a triple where
is a set of states; subsets of are called events.
is a binary belief relation on which is serial: , such that ( is an alternative notation for ). We denote by the set of states that are reachable from by : . is interpreted as the set of states that initially the agent considers doxastically possible at state .
is a selection function that associates with every state-event pair (with ) a set of states . is interpreted as the set of states that are closest (or most similar) to , conditional on event .
We require seriality of the belief relation because it ensures that the initial beliefs at state , represented by the non-empty set , are consistent, as assumed in the AGM approach. Similarly, the requirement that is defined only if ensures that the informational input is consistent (the reaction to inconsistent information is discussed in Section 3). Note the absence, in Definition 2.3, of the extra properties imposed on the selection function in Bonanno (2025), namely,
(Identity).
(Normality).
if then (Weak Centering).
The reason why we do not impose any properties on the selection function is that we want to highlight the role of each property in the characterization of the AGM axioms. For example, Identity (localized to ) plays a role in the characterization of but not in the characterization of the other axioms, Normality (localized to ) is used to characterize axiom but not the other axioms,2 and a weaker form of Weak Centering is used in the characterization of axiom .
Adding a valuation to a frame yields a model. Thus a model is a tuple where is a frame and is a valuation that assigns to every atomic formula the set of states where is true.
Given a model define truth of a Boolean formula at a state in model , denoted by , as follows:
if then if and only if ,
if and only if ,
if and only if or (or both).
We denote by the truth set of formula in model :
Given a model and a state , let ; thus a Boolean formula belongs to if and only if at state the agent believes , in the sense that is true at every state that the agent considers doxastically possible at state . We identify with the agent’s initial beliefs at state. It is shown in Bonanno (2025) that the set so defined is deductively closed and consistent (recall the assumption that the belief relation is serial).
Next, given a model and a state , let 3 and define the following partial belief change function based on :
Given the customary interpretation of selection functions in terms of conditionals, (RI) can be interpreted as stating that if and only if at state the agent believes that ‘‘if is (were) the case then is (would be) the case.’’4 This interpretation will be made explicit in the modal logic considered in Section 3. In what follows, when stating an axiom for a belief change function, we implicitly assume that it applies to every formula in its domain. For example, the axiom asserts that, for all in the domain of , .
An axiom for belief change functions is valid on a frame if, for every model based on that frame and for every state in that model, the partial belief change function defined by (RI) satisfies the axiom. An axiom is valid on a set of frames if it is valid on every frame .
Frame Correspondence
A stronger notion than validity is that of frame correspondence. The following definition mimics the notion of frame correspondence in modal logic.
We say that an axiom of belief change functions is characterized by, or corresponds to, or characterizes, a property of frames if the following is true:
axiom is valid on the class of frames that satisfy property , and
if a frame does not satisfy property then axiom is not valid on that frame, that is, there is a model based on that frame and a state in that model where the partial belief change function defined by (RI) violates axiom .
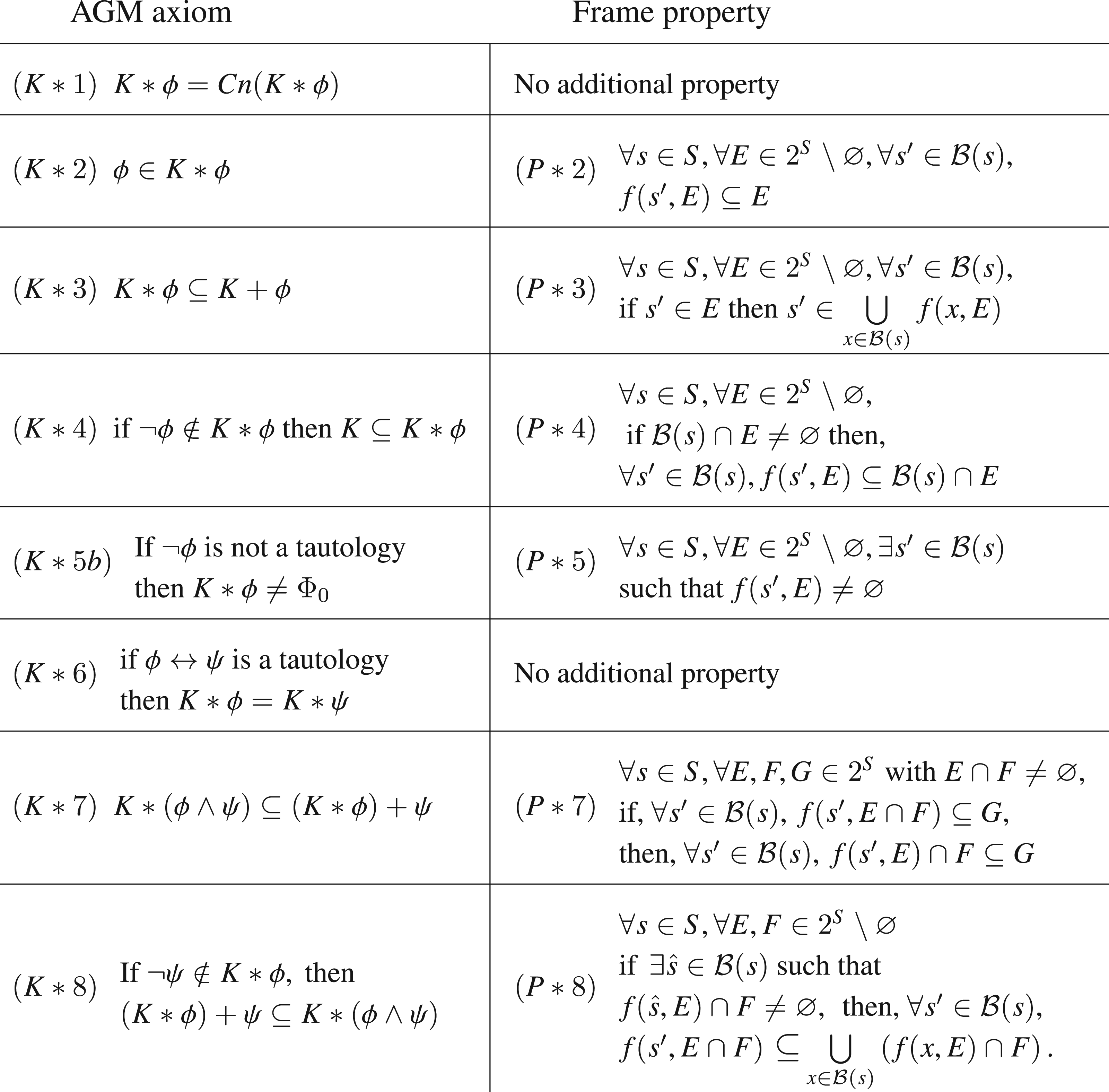
The table in Figure 1 shows, for every AGM axiom, the characterizing property of frames.5 The reason for the absence of axiom from the table is explained in the next section.
Semantic Characterization of the AGM Axioms.
The characterization for and is proved in Propositions 9, 3 and 10, respectively, in Bonanno (2025). For the remaining AGM axioms we note the following.
Validity of on all frames is a consequence of Part (B) of Lemma 1 in Bonanno (2025).
Sufficiency for is proved in Item 2 of Proposition 1 in Bonanno (2025). For necessity, consider a frame that violates Property , that is, there exist , and such that . Construct a model where, for some atomic sentence , . Then, since and , , yielding a violation of .
The proof for is as follows.
(A) Sufficiency. Consider a model based on a frame that satisfies Property . Let be such that and let and be such that , that is, for every , , so that . Fix an arbitrary . If (i.e., ) then . If , then by Property , and hence ; thus . It follows that and thus (since, by Lemma 2 in Bonanno (2025), is deductively closed) .
(B) Necessity. Consider a frame that violates , that is, there exist , and such that (thus ) and . Construct a model based on this frame where, for some atomic sentences and , and . Then, for every , so that . Since and , from which it follows (since ) that and thus . Hence, since but , .
For axiom the proof is as follows.
Sufficiency. Consider a model based on a frame that satisfies Property . Let be such that and fix an arbitrary . By there exists an such that . Let be an atomic sentence . Then . Hence, since , so that .
Necessity. Consider a frame that violates , that is, there exist and such that, , . Construct a model based on this frame where, for some atomic sentence , . Fix an arbitrary . Then, , , so that, by , . Thus .
Validity of on all frames is a consequence of the fact that if is a tautology, then, in every model, .
In Bonanno (2025) it is shown that the class of frames that satisfy the properties listed in Figure 1 characterizes the set of AGM belief revision functions in the following sense (for simplicity we omit the subscript that refers to a given model, for example, we write instead of ):
For every model based on a frame in and for every state in that model, the partial belief change function (based on and ) defined by (RI) can be extended to a full-domain belief revision function that satisfies the AGM axioms -.
Let be a consistent and deductively closed set and let be a belief revision function based on that satisfies the AGM axioms. Then there exists a frame in , a model based on that frame and a state in that model such that (a) and (b) the partial belief change function (based on and ) defined by (RI) is such that for every consistent formula .
A Modal Logic for Belief Revision
We now introduce a simple language with three modal operators: a unimodal belief operator , a bimodal conditional operator > and the unimodal global operator . The interpretation of is ‘‘the agent believes ,’’ the interpretation of is ‘‘if is (or were) the case then is (or would be) the case’’ and the interpretation of is ‘‘ is necessarily true.’’
The set of formulas in the language is defined as follows. The reasons why we consider a restricted language are discussed in Section 4.
Let be the set of Boolean formulas defined in Section 2.
Finally, let be the set of Boolean combinations of formulas in .
Kripke–Lewis Semantics
As semantics for this modal logic we take the Kripke–Lewis frames of Definition 2.3. A model based on a frame is obtained, as before, by adding a valuation . The following definition expands Definition 2.4 by adding validation rules for formulas of the form , and .
Truth of a formula at state in model (denoted by ) is defined as follows:
if then if and only if .
For , if and only if .
For , if and only if or (or both).
For , if and only if, , (thus if and only if, for some , ).
The definition of validity is as in the previous section.
A formula is valid on a frame if, for every model based on that frame and for every state in that model, . A formula is valid on a set of frames if it is valid on every frame .
Frame Correspondence
A formula is characterized by, or corresponds to, or characterizes, a property of frames if the following is true:
is valid on the class of frames that satisfy property , and
if a frame does not satisfy property then is not valid on that frame.
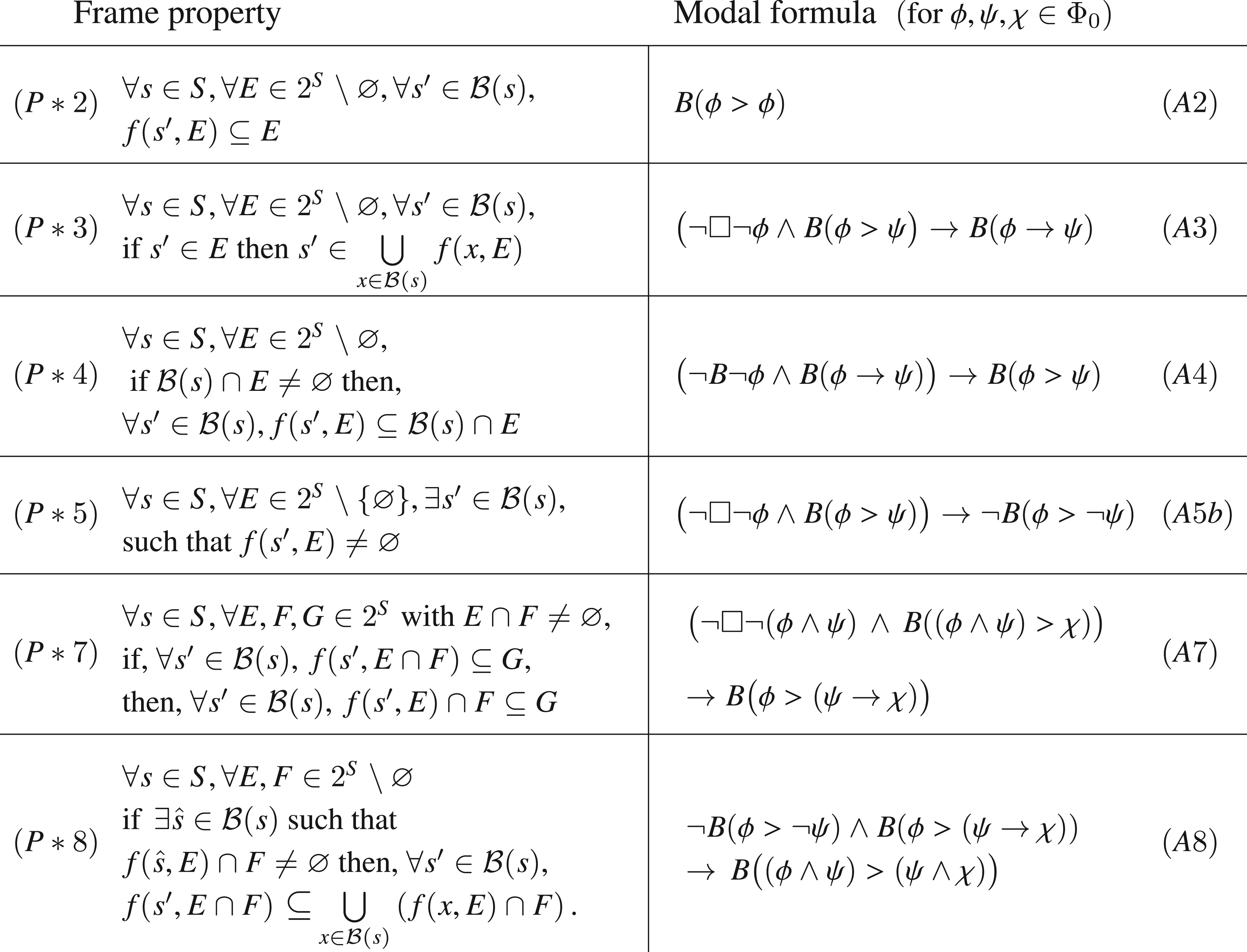
The table in Figure 2 shows, for every property of frames considered in Figure 1, the modal formula that corresponds to it. The proofs of the characterizations results are given in the Appendix.
Modal Characterization of the Frame Properties of Figure 1.
Putting together Figures 1 and 2, we have a modal-logic characterization of AGM axioms , , , , and . For instance, the modal axiom corresponds to AGM axiom () in the following sense: is characterized by frame Property which, in turn, characterizes ; in other words, can be viewed as a ‘‘translation’’ into our modal logic of AGM axiom .
To complete the analysis we need to account for AGM axioms , and .
The modal counterpart of () can be taken to be the following axiom: for ,
which is valid on all the frames considered in this paper.10
axiom (if is a contradiction, then ) can be captured in our logic by the following rule of inference: if is a tautology (a theorem of propositional calculus) then is a theorem.
AGM axiom (if is a tautology then ) can be captured in our logic by the following rule of inference: if is a tautology then is a theorem (for ), which is clearly validity preserving in every model, since if is a tautology then .
In Axioms and the clause in the antecedent ensures that, on the semantic side, , so that is defined; similarly for in Axiom .
While the comparison of properties and is not straightforward, a comparison of the corresponding Axioms and makes it very clear that the two are closely related. First of all, note that can be equivalently written as (to obtain the original formulation, first replace by and then replace by and note that is tautologically equivalent to ). Comparing and ,
we see that the antecedent is the same in both while in the consequent has ’’ (the material conditional) while has ’’ (the counterfactual conditional).
A similar comparison and shows that they are closely related. Note that can be equivalently written as
(to obtain the original formulation, first replace by and then replace by ). Next observe that (1) is tautologically equivalent to , so that is equivalent to , and (2) is tautologically equivalent to , so that is equivalent to ; thus, (2) can be written as shown below:
The difference between and is that the first two instances of the material conditional ’’ in the antecedent of are replaced by the counterfactual conditional ’>’ in ,11 and in the consequent in ir replaced by in .
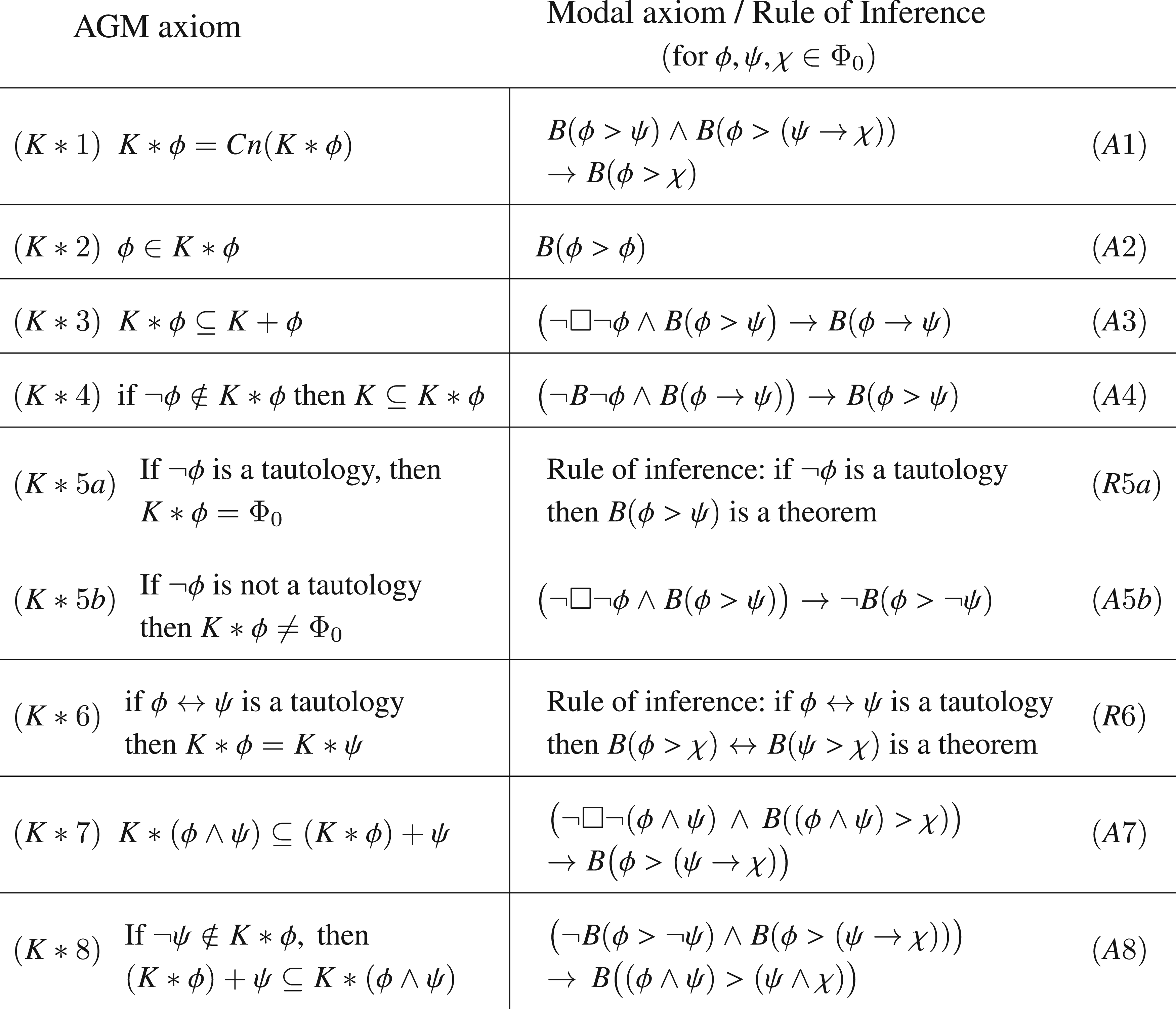
The table in Figure 3 synthesizes Figures 1 and 2 by showing the correspondence between each AGM axiom and its modal counterpart.
The Correspondence Between AGM Axioms and their Modal Counterparts.
Conclusion
The modal language considered in Section 3 is a restricted one which allows for nesting of some modal operators (e.g., formulas such as ) but not others (see Footnotes 5, 6 and 7). The purpose of this paper was to identify the smallest language that ‘‘does the job,’’ that is, that allows one to translate the AGM axioms into modal axioms. Furthermore, the simple language affords easier tractability and interpretability. We leave to future research the investigation of extensions of the language that allow for more nesting of the operators, for example, formulas such as or , which might be appropriate for modeling iterated belief revision (Darwiche & Pearl, 1997; Peppas, 2014), or formulas such as the strict conditional or or . Such a richer language would allow one to model belief introspection and higher-order doxastic reasoning as well as, perhaps, iterated belief revision.
As noted in the Introduction, one benefit of recasting the AGM theory of belief revision in the language of modal logic is that both belief and belief revision can then by analyzed within the same framework. Furthermore, the language of modal logic affords greater expressiveness: for example, it allows one to express introspective properties of belief, which cannot be done in the AGM approach. It also allows one to distinguish between different kinds of conditional beliefs such as ‘‘I believe that if were the case then would be the case’’ () and ”if were the case then I would believe ” () and ”if I were to believe then I would believe ” (). Leitgeb (Leitgeb, 2007) suggests that in the AGM approach ought to be understood in terms of the conditional , while we provided a translation of the AGM axioms in terms of the conditional . Presumably, the three types of conditional beliefs express different concepts and obey different principles; modal logic allows one to analyze such differences.
In this paper we have focused on AGM belief revision, but—as shown in Bonanno (2023) and Bonanno (2025)—the Kripke–Lewis semantics can be used also to provide a characterization of AGM belief contraction (Gärdenfors, 1988) and of Katsuno–Mendelzon belief update (Katsuno & Mendelzon, 1991). Extending the results of this paper to contraction and update is left to future research.
A connection between conditional logic and AGM belief revision has been pointed out in several contributions, in particular (Giordano et al., 1998, 2001, 2005; Günther & Sisti, 2022). Although there are some similarities between our approach and those contributions, there are also some important differences. For a detailed discussion see Bonanno (2025).
Footnotes
ORCID iD
Giacomo Bonanno
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Conflicting Interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Notes
Appendix
References
1.
AlchourrónC.GärdenforsP.MakinsonD. (1985). On the logic of theory change: Partial meet contraction and revision functions. The Journal of Symbolic Logic, 50, 510–530.
2.
BonannoG. (2007). Axiomatic characterization of the AGM theory of belief revision in a temporal logic. Artificial Intelligence, 171(2-3), 144–160. https://doi.org/10.1016/j.artint.2006.12.001
3.
BonannoG. (2012). Belief change in branching time: AGM-consistency and iterated revision. Journal of Philosophical Logic, 41, 201–236. https://doi.org/10.1007/s10992-011-9202-6
4.
BonannoG. (2023). Characterization of AGM belief contraction in terms of conditionals. In R. Verbrugge (Ed.), Proceedings nineteenth conference on theoretical aspects of rationality and knowledge, Oxford, United Kingdom, 28-30th June 2023, Electronic Proceedings in Theoretical Computer Science, (Vol. 379, pp. 142–156). Open Publishing Association. https://doi.org/10.4204/EPTCS.379.13
DarwicheA.PearlJ. (1997). On the logic of iterated belief revision. Artificial Intelligence, 89, 1–29.
8.
FerméE.HanssonS. O. (2018). Belief Change: Introduction and Overview. Springer.
9.
FriedmanN.HalpernJ. (1997). Modeling belief in dynamic systems. Part I: Foundations. Artificial Intelligence, 95, 257–316.
10.
FuhrmannA. (1991). On the modal logic of theory change. In A. Fuhrmann & M. Morreau (Eds.), The logic of theory change (pp. 259–281). Berlin/Heidelberg: Springer.
11.
GärdenforsP. (1988). Knowledge in Flux: Modeling the Dynamics of Epistemic States. MIT Press.
12.
GiordanoL.GliozziV.OlivettiN. (1998). A conditional logic for belief revision. In J. Dix, L. F. N. del Cerro, & U. Furbach (Eds.), Logics in artificial intelligence (pp. 294–308). Berlin/Heidelberg: Springer. https://link.springer.com/chapter/10.1007/3-540-49545-2_20
13.
GiordanoL.GliozziV.OlivettiN. (2001). Belief revision and the Ramsey test: A solution. In F. Esposito (Ed.), AI*IA 2001: Advances in artificial intelligence (pp. 165–175). Berlin, Heidelberg: Springer. https://doi.org/10.2307/2185133
14.
GiordanoL.GliozziV.OlivettiN. (2005). Weak AGM postulates and strong Ramsey test: A logical formalization. Artificial Intelligence, 168, 1–37.
HintikkaJ. (1962). Knowledge and Belief: An Introduction to the Logic of the Two Notions. Cornell: Cornell University Press.
17.
KatsunoH.MendelzonA. O. (1991). On the difference between updating a knowledge base and revising it. In Proceedings of the second international conference on principles of knowledge representation and reasoning, KR’91, (pp. 387–394). San Francisco: Morgan Kaufmann Publishers Inc.
18.
KripkeS. (1963). A semantical analysis of modal logic I: Normal propositional calculi. Zeitschrift für Mathematische Logik und Grundlagen der Mathematik, 9, 67–96.
19.
LeitgebH. (2007). Belief in conditionals vs. conditional beliefs. Topoi, 26, 115–132.
PeppasP. (2014). A panorama of iterated revision. In S. O. Hansson (Ed.), David Makinson on classical methods for non-classical problems. Outstanding contributions to logic (Vol. 3, pp. 699–710). Dordrecht: Springer. https://link.springer.com/chapter/10.1007/978-94-007-7759-0_5
22.
SegerbergK. (1998). Irrevocable belief revision in dynamic doxastic logic. Notre Dame Journal of Formal Logic, 39(3), 287–306.