
Abstract
Simulating microgrids that incorporate electric vehicles and photovoltaic solar energy, along with their penetration levels, is a complex task that requires considering realistic grid parameters. This study presents an integrated simulation method using Python and OpenDSS, enabling researchers to analyze factors such as load curves, communication links, electric vehicle demand, photovoltaic generation, electric vehicle penetration levels, and connection event probability curves. Additionally, the software includes smoothing algorithms for solar radiation to mitigate voltage fluctuations. The simulation tool also allows for the evaluation of communication delays between the system aggregator and charging stations when modifying the charging setpoint at customer connection bars. The results indicate that communication delays significantly impact voltage stability at consumer connection points. Smoothing algorithms, such as the Savitzky-Golay filter, reduce voltage fluctuations by up to 8% in high PV penetration scenarios. Moreover, PV penetration levels around 0.6 were found to create the highest transformer loads, highlighting the need for adaptive control strategies. Voltage deviations at customer loads ranged from +1.5% to −3.2% depending on the delay time and PV penetration.
Introduction
Modern electric power networks are encountering new challenges with the integration of electric vehicles (EVs) and distributed generation (DG), reshaping conventional paradigms in energy distribution and management. The growing penetration of these technologies requires advanced analytical tools that can model their impact accurately, considering realistic grid conditions, communication infrastructures, and dynamic interactions between system components.
To effectively evaluate the influence of EVs and photovoltaic (PV) generation on the grid, it is crucial to employ simulation platforms that not only represent electrical characteristics but also incorporate user behavior and real-world operational constraints. However, traditional simulation software often lacks the capability to integrate additional parameters that reflect the complexity of modern distribution networks. Furthermore, most existing tools are designed for medium- and high-voltage networks, limiting their applicability for studying the effects of DG and EV penetration at the low-voltage level, where most residential and small commercial consumers are connected (Arritt and Dugan, 2011).
Given the increasing relevance of decentralized energy resources, there is a growing need for simulation platforms that explicitly model the low-voltage distribution network, particularly at the consumer connection point. Accurate modeling at this level is essential for optimizing EV charging strategies, mitigating voltage fluctuations due to intermittent PV generation, and ensuring grid stability in the face of rapidly evolving energy consumption patterns. Future developments in simulation tools should aim to bridge this gap by incorporating comprehensive low-voltage models, enabling more precise assessments of grid performance and supporting the design of resilient, smart distribution systems.
Likewise, the widespread adoption of EVs and their integration into the distribution grid must be modeled with high precision, as EV charging represents a significant and variable load that directly impacts grid stability. Unlike traditional residential or commercial loads, EV demand is inherently unpredictable, as it depends on user behavior, mobility patterns, charging demands, and even external factors such as electricity prices and weather conditions. This variability makes it essential to develop robust simulation methodologies capable of capturing these dynamic behaviors.
To address this challenge, specialized simulators have been developed over the past decade, particularly for analyzing DGS and EV interactions. Many of these tools are open-source, enabling seamless integration with existing simulation platforms and extending their functionality. For example, studies such as (Gonzalez et al., 2016; Valverde et al., 2017) have combined geographic information systems (GIS) with OpenDSS, an open-source software widely used for distribution grid analysis, to enhance spatial modeling and improve the accuracy of EV load forecasting.
Additionally, efforts have been made to develop tools that generate realistic EV mobility patterns over time. In (Gaete-Morales et al., 2021), a simulation framework is designed to create time series that describe EV movement and charging behavior, incorporating key factors such as regenerative braking effects and the availability of charging infrastructure. These enhancements enable more accurate predictions of charging demand and its impact on grid operations.
Similarly, in the context of distributed generation, open-source software packages have played a critical role in expanding the capabilities of traditional simulation models. For instance, in (Theodoro et al., 2018), researchers propose a co-simulation approach for distribution grids with high PV penetration, focusing on analyzing processing times and grid response to varying generation levels. These advancements highlight the importance of integrating diverse simulation tools to study the complex interactions between EVs, renewable generation, and grid stability.
Another challenge associated with integrating renewable energy into the grid is the high variability of solar and wind resources. To address this, studies have been conducted to control EV charging with the objective of mitigating frequency and voltage fluctuations caused by this variability (Ali et al., 2019), assessing grid impact (Jones et al., 2021), and suppressing PV output fluctuations (Yukita et al., 2019).
EV charging control can be implemented in both centralized and decentralized approaches (Faddel et al., 2018). For instance, in (Kikusato et al., 2019), a structure is proposed for utilizing PV systems and managing EV charging through integrated home control systems, enabling energy transfer from EVs to the grid. Additionally, charging control strategies and algorithms must account for variations in photovoltaic generation (Ma et al., 2019). Depending on whether the power interaction is unidirectional (V1G) or bidirectional (V2G) (Alsharif et al., 2021), EVs can also serve as storage systems to support the grid during contingencies. In such cases, the idle time—when the vehicle is connected but not actively charging—is typically used to discharge energy back into the grid without significantly affecting the battery's state of charge (SOC) (Lucas et al., 2019).
The simulation of DGS and EV charging control enables the analysis of the network's response to variations in the charging setpoint. However, current simulation platforms lack specific modules to configure this behavior, making a comprehensive solution necessary.
Recent research has explored the impact of EV and PV penetration using a variety of co-simulation approaches. For instance (Baringo et al., 2021) implemented a real-time OPAL-RT and Simulink-based co-simulation framework, focusing on EV load forecasting but without accounting for latency or communication delays. Similarly (Awosusi et al., 2022) developed a detailed Modelica-based platform to simulate decentralized storage and PV dynamics but lacked integration with control algorithms under stochastic conditions. In contrast, our proposed tool bridges the gap between control responsiveness and physical grid behavior by explicitly modeling latency through a communication layer and allowing scenario-specific customizations via a user interface.
By combining Python with OpenDSS, our work provides a more open and extensible alternative, tailored for low-voltage analysis and control experiments under realistic constraints. Building upon these studies, our work introduces a co-simulation environment that integrates Python and OpenDSS, offering a flexible and extensible platform to analyze the effects of latency and charge control in low-voltage grids with high PV penetration. This approach allows for the assessment of communication delays and their impact on voltage stability, providing valuable insights for the development of adaptive control strategies in modern power systems.
This paper proposes a co-simulation environment that integrates various simulation parameters for DGS with high PV and EV penetration, considering real operational scenarios. Specifically, it accounts for communication delays between the aggregator responsible for EV load control and charging stations. The software developed in this article is the result of the research carried out in the doctoral thesis “Design, validation and implementation of algorithms and communication and control architectures for the integration of solar photovoltaic energy and electric mobility in microgrids” at the University of Valladolid (Davila-Sacoto, 2025). The simulation is conducted using OpenDSS and Python, managed through a web interface, and is available for download at https://github.com/davilamds/EVPVSimulation.
While many existing simulation studies address the integration of EVs and PV systems in distribution networks, few explicitly model the effects of communication latency between aggregators and EV charging points. Most prior platforms also lack real-time configurability and user control over key parameters such as delay, load profile variability, and stochastic EV connection patterns. The novelty of this work lies in the development of an open-source co-simulation platform that combines Python and OpenDSS through a customizable web interface, allowing users to evaluate voltage stability under latency-constrained control scenarios. By addressing the overlooked impact of setpoint delay on low-voltage performance, and integrating smoothing algorithms for control signals, this study fills an important gap in the simulation and planning of smart grid operations with high DER penetration.
The rest of this paper is organized as follows: Section “Design of an integrated simulation platform with Python and OpenDSS” describes the design and implementation of the co-simulation platform. Section “Simulation of electric vehicle charging and penetration of photovoltaic generation” presents the simulation setup and results. Section “Conclusions” discusses key findings and implications. Finally, Section “Future work” concludes the paper and outlines future work.
Design of an integrated simulation platform with Python and OpenDSS
The simulation was developed using a Python-based front end that interfaces with OpenDSS through a co-simulation loop. Load curves were generated using probabilistic models derived from typical residential demand profiles, incorporating weekday/weekend and hourly variability. EV connection events were defined through stochastic distributions based on user-defined probability density functions.
Communication latency was modeled as a configurable time delay between the command issued by the aggregator and its application at the EV charger, simulating real-world delays in signal propagation and processing. The charging control strategy implemented a rolling setpoint system adjusted each simulation step. In scenarios where smoothing was enabled, a Savitzky-Golay filter was applied to avoid abrupt load shifts and voltage oscillations.
Although direct experimental validation was not feasible due to the lack of field data, the simulation outputs — including voltage profiles, power flows, and transformer loading — were compared against benchmark behaviors documented in OpenDSS reference studies. The system exhibited consistent dynamic responses under increasing DER penetration, supporting the internal consistency of the models.
To ensure that the simulation system operates with realistic parameters, an aggregator system is implemented as the primary control entity for managing EV charging within the electrical grid. The aggregator plays a crucial role in balancing energy demand and supply by coordinating charging activities based on real-time grid conditions. It establishes direct communication with the distribution system operator (DSO), which oversees the operation of photovoltaic (PV) generation systems and residential loads, ensuring an efficient and stable energy distribution process.
In many electricity market models, aggregators manage EV charging by adjusting loads according to fluctuations in energy prices, dynamically responding to grid demand and cost variations (Das et al., 2020). However, in the proposed approach, the aggregator takes a more advanced role by modifying the EV charging setpoint using both V1G and V2G charging strategies. This allows for enhanced energy flexibility, as EVs can not only draw power from the grid but also inject stored energy back into it when necessary.
Furthermore, the control mechanism incorporates a predictive element based on solar radiation levels, ensuring that charging decisions are aligned with PV generation patterns. By leveraging solar availability data, the aggregator can optimize charging schedules to minimize grid stress, reduce reliance on non-renewable energy sources, and enhance overall system efficiency. As illustrated in Figure 1, this integration of solar-based control signals enhances the synchronization between EV charging demand and renewable energy production, making the grid more adaptive and resilient in the face of fluctuating generation levels.
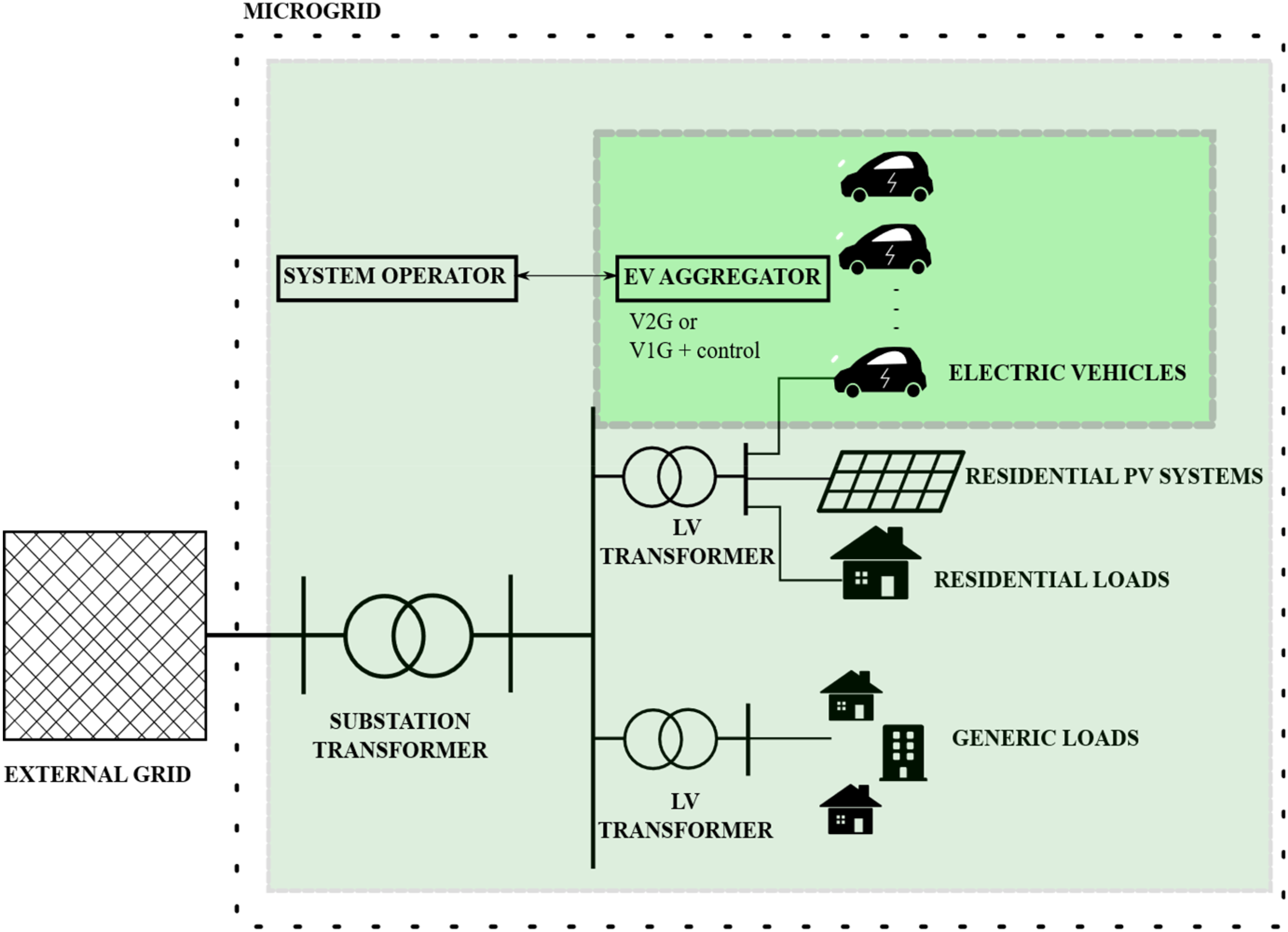
Control areas used in the simulation platform (Davila-Sacoto, 2025).
Figure 1 shows the single-line diagram used in the co-simulation platform. The diagram represents an external medium-voltage grid supplying power to a primary substation. From this substation, power is delivered to an EV aggregator, which is responsible for managing charging strategies across a group of EVs. Two separate low-voltage transformers connect the substation to different types of consumer loads: one serving residential consumers with high variability and potential PV integration, and another serving generic aggregated loads. This setup allows the simulation to represent heterogeneous consumption patterns and assess the impact of load balancing and voltage fluctuations. The EV aggregator receives control signals from the simulation platform, which include delay modeling and setpoint smoothing algorithms, and transmits these to the residential EV chargers. This structure mirrors the topology of many urban and semi-urban low-voltage grids and provides a realistic testbed for evaluating smart charging coordination under latency constraints.
The co-simulation platform is designed with a high degree of flexibility, allowing end users to adjust key parameters to conduct detailed analyses of PV and EV system penetration. One of the primary focuses of the platform is the ability to assess the impact of communication delays, a factor that plays a critical role in real-time grid management and stability. By modifying these parameters, users can simulate different grid scenarios and evaluate how varying levels of PV and EV integration affect voltage stability, power flows, and overall system performance. Figure 2 provides a visual representation of the adjustable parameters available within the software.

User configurable parameters implemented in the proposed simulation platform.
To enhance usability and adaptability, the platform incorporates a modular design where users can fine-tune multiple system variables. This includes adjusting penetration levels of PV systems and EVs, enabling or disabling specific system components for initial analysis, and modifying communication-related settings such as transmission, queuing, and processing delays. These customizations allow for a more accurate representation of real-world operating conditions, enabling researchers and grid operators to test various scenarios before implementing changes in actual distribution networks (see Figure 2).
Additionally, the ability to modify operational settings makes the platform an effective tool for evaluating different energy management strategies, demand response techniques, and the interaction between distributed energy resources and grid stability. Future enhancements could incorporate real-time data feeds, AI-driven optimization algorithms, and cloud-based simulations to further refine its predictive capabilities and make it a more powerful tool for modern grid analysis and planning.
Figure 2 illustrates the main parameters that users can configure within the simulation platform. These include EV and PV penetration levels, communication delay times, charging strategies, and the selection of load profiles based on weekday or weekend patterns. Each parameter plays a critical role in shaping the behavior of the simulated grid. For example, increasing EV penetration raises total load demand and may trigger voltage drops or overloads under certain delay conditions. Adjusting PV penetration allows for analyzing the system's capacity to handle intermittent generation. Varying delay times reveals the system's responsiveness and stability under different communication constraints. By providing users with control over these variables, the platform enables targeted experimentation — such as evaluating demand response strategies, optimizing EV charging windows, and testing resilience under high DER variability. This modularity makes the simulation tool valuable for researchers, planners, and utility engineers interested in stress-testing different smart grid scenarios before real-world implementation.
The co-simulation process integrates two powerful tools: OpenDSS and Python, each playing a distinct yet complementary role in simulating the behavior of modern electrical distribution networks. OpenDSS serves as the core engine for electrical system analysis, handling critical calculations such as power flow distribution and bus voltage variations. Meanwhile, Python functions as the orchestrator, dynamically managing key system parameters, including PV generation levels, residential load profiles, and the connection and disconnection patterns of EVs (see Figure 3).

Co-simulation platform using Python and OpenDSS (Davila-Sacoto, 2025) (a) main variables (b) flowchart.
The control mechanism operates iteratively at each simulation time step, ensuring real-time responsiveness to changing grid conditions. Python retrieves user-defined parameters from an interactive HTML interface, processes them, and seamlessly transmits the necessary commands to OpenDSS. This modular approach enhances the flexibility of the simulation, allowing users to modify grid conditions on the fly and observe the effects of various scenarios with minimal computational overhead.
By leveraging this co-simulation framework, researchers and grid operators can explore a wide range of case studies, such as evaluating the impact of increased EV penetration on voltage stability, analyzing PV system variability under different weather conditions, or testing different demand response strategies. Future improvements to the system could include real-time data integration, AI-driven predictive modeling, and cloud-based simulations to further enhance accuracy, scalability, and decision-making capabilities for smart grid management.
Distribution grid modeling in OpenDSS
In the simulation framework, key elements such as PV systems and EVs are integrated across all system buses, ensuring comprehensive modeling of their interactions with the grid. These components can be selectively enabled or disabled within the Python script, allowing users to customize the simulation to reflect different operational scenarios and penetration levels (see Figure 4(b)). This flexibility enables researchers and grid operators to analyze a wide range of conditions, from low-penetration cases with minimal impact on grid stability to high-penetration scenarios that test the resilience of the distribution network.

Microgrid definition in OpenDSS a) Redirection of libraries b) Definition of PV and EV systems c) configurable parameters by the user in the HTML interface.
To further enhance user control and adaptability, the platform includes an intuitive HTML-based interface that facilitates configuration of essential simulation parameters. Through this interface, users can select the appropriate OpenDSS master file, ensuring compatibility with different network topologies and case studies. Additionally, the simulation duration can be adjusted to represent various time frames, from short-term operational assessments to long-term planning studies.
Another critical feature is the ability to define the number of Monte Carlo simulations, which allows for probabilistic analysis of grid behavior under varying conditions. This approach is particularly useful for assessing the uncertainty associated with EV charging patterns, PV generation fluctuations, and other stochastic variables.
Furthermore, the interface enables users to specify whether the simulation corresponds to a weekday or a weekend. This distinction is essential, as EV connection and charging behaviors tend to differ significantly based on daily routines and mobility patterns. By incorporating these behavioral variations into the model, the simulation provides a more accurate representation of real-world grid dynamics (see Figure 4(c)).
Electric Vehicles, charging control and communication
In the co-simulation framework, EVs are represented as bidirectional energy storage systems within OpenDSS, allowing for both energy consumption and injection back into the grid through V2G functionality. This modeling approach enables a more realistic simulation of EV interactions with the power distribution network, considering V1G and V2G exchange scenarios.
Python acts as the central controller, dynamically managing key variables such as EV penetration levels and connection events. By continuously adjusting these parameters based on predefined scenarios or real-time inputs, Python ensures that the simulation accurately reflects the stochastic nature of EV behavior, including charging patterns, mobility trends, and grid impact.
The penetration level of EVs can be customized via an intuitive HTML interface, allowing users to simulate different degrees of EV adoption and their corresponding effects on grid stability. EV penetration is quantified as the ratio between the total charging power of all connected EVs within the system and the total power demand of residential loads (Eq. 1). This metric provides insight into how increasing EV adoption affects power flow dynamics, voltage stability, and transformer loading within the distribution network.

To accurately model EV connection events within the distribution network, a binomial probability curve is employed. This curve is designed based on real-world charging system behavior (Quiros-Tortos et al., 2018), ensuring that the simulation reflects typical user charging patterns, including random fluctuations in EV plug-in and unplugging times. The probability distribution accounts for factors such as commuting schedules, charging habits, and grid demand fluctuations, providing a realistic representation of EV penetration at different times of the day.
Users have the flexibility to either generate this probability curve automatically using preconfigured statistical models or manually define custom connection profiles through the HTML interface (see Figure 5). This adaptability allows researchers and grid operators to simulate a wide range of scenarios, from typical residential charging patterns to high-demand commercial fleet charging operations.

User configurable parameters for electric vehicles (Davila-Sacoto, 2025).
Moreover, the simulation also considers the inherent delay in EV load command execution. As described in (Dávila-Sacoto et al., 2020), when a charging setpoint is modified by the aggregator or control system, a response delay occurs before the EV charging power adjusts accordingly. This delay can stem from various factors, including communication latency between the aggregator and charging stations, processing times within the EV's battery management system, and inherent response times of the power electronics controlling the charge. By incorporating both connection probability curves and charging delay times, the simulation platform provides a comprehensive tool for studying the dynamic interaction between EVs and the power grid.
Figure 5 presents the user-modifiable parameters specifically related to electric vehicle modeling within the simulation platform. These include EV penetration level, connection probability distributions, and delay times for implementing control signals. The flexibility to adjust these parameters empowers researchers to explore various research questions. For example, by increasing EV penetration, one can investigate at what threshold voltage instability begins to emerge. Modifying connection probability profiles allows for testing behavioral hypotheses based on time-of-day or weekday/weekend usage trends. Adjusting communication delays simulates different network qualities, enabling the analysis of how latency degrades the effectiveness of smart charging coordination. These capabilities support experimentation with a wide range of scenarios, facilitating the design and evaluation of robust control strategies tailored to different grid configurations and EV adoption scenarios.
EV charging control is implemented similarly to the approach described in (Dávila-Sacoto et al., 2020), where it is demonstrated that applying a smoothing filter to photovoltaic resource variations—using a Tustin transform on the charging setpoint—can help mitigate voltage fluctuations at customer connection points.
In this case, a control algorithm based on a Savitzky-Golay filter is utilized (see Figure 6). This filter processes the charging power setpoint applied to the EVs in the system, aligning with the connection event probability curve. By dynamically adjusting the EV charging power in response to fluctuations in the PV resource, the system reduces the overall impact on bus voltages.
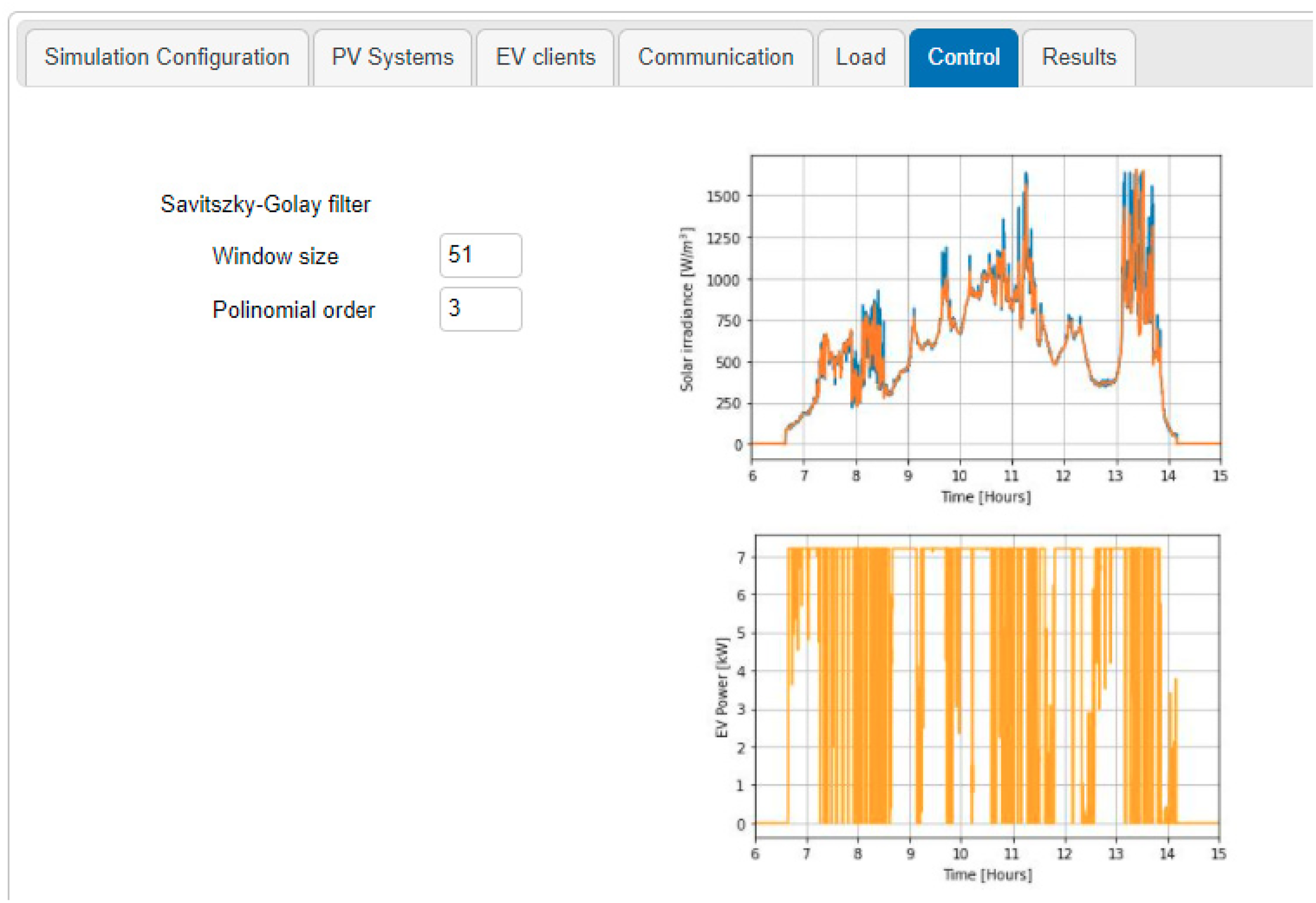
User configurable parameters for charging control (Davila-Sacoto, 2025).
The application of such smoothing algorithms is particularly crucial in networks with high PV penetration, as these systems exhibit very low inertia (Khazaei et al., 2020), making them more susceptible to rapid voltage variations and instability. By integrating adaptive control mechanisms, the system enhances grid stability and ensures more efficient coordination between EV charging and renewable energy generation.
Additionally, the co-simulation platform enables the calculation and application of communication time delays between the EV charging system aggregator and the charging stations. This parameter is typically overlooked in DGS simulations involving EVs due to the minimal delays in modern communication equipment. However, in electrical grids with high PV penetration, where rapid variations in solar radiation occur due to significant cloud cover, the system must be capable of responding to these fluctuations within very short timeframes. The HTML interface allows users to compute transmission, propagation, queuing, and processing delays based on the number of communication nodes present in the system (see Figure 7). These delays are particularly relevant in networks with high EV penetration that span large geographical areas, as they can lead to increased processing and queuing times, potentially affecting grid stability and response efficiency.

User configurable parameters for communication delays (Davila-Sacoto, 2025).
Photovoltaic systems
In the case of PV generation systems, the HTML interface allows the user to configure the degree of penetration, and define specific operating curves such as irradiation, efficiency, and temperature (see Figure 8).

User configurable parameters for photovoltaic systems (Davila-Sacoto, 2025).
Residential loads
Finally, the load profile of the residential loads connected to the distribution system can be modified on the HTML interface (see Figure 9). The curve is defined in per unit values.

User configurable parameters for residential loads (Davila-Sacoto, 2025).
Simulation of electric vehicle charging and penetration of photovoltaic generation
The system was tested using the IEEE European LV Test Feeder (see Figure 10). The system has PV generation systems and EVs at all the load buses.

Simulated distribution system (Davila-Sacoto, 2025).
The IEEE European Low Voltage Test Feeder was selected for this study due to its detailed modeling of urban residential networks typically found in Europe. Unlike other IEEE benchmark systems, this feeder includes a three-phase low-voltage topology with unbalanced loads, varying line lengths, and multiple connection points suitable for integrating distributed energy resources (DERs) such as EVs and PV systems. Its realistic representation of low-voltage conditions makes it particularly well-suited for analyzing voltage fluctuations, control delays, and local generation impacts. Furthermore, the feeder has been widely used in recent literature as a reference for co-simulation validation in smart grid research.
Using the co-simulation platform, various tests were conducted primarily to analyze bus voltage behavior under different communication delay times and penetration levels of EVs and PV systems. Given that different EV manufacturers exhibit variations in response times when updating charging setpoints (Dávila-Sacoto et al., 2020), simulations were performed using multiple delay values, along with the application of the Savitzky-Golay filter (see Figure 11).

Voltage in the “LOAD10” connection bar for different EV charging setpoint delay times (Davila-Sacoto, 2025) (a) 24-h voltage (b) Average voltage and different delay times.
The results indicate that as the delay in updating the EV charging power increases, the voltage levels at customer connection points fluctuate accordingly. Specifically, shorter delays tend to result in higher bus voltages, while longer delays lead to lower voltage levels. This behavior highlights the importance of precise and timely EV load control in maintaining grid stability, especially in networks with high renewable energy penetration. The findings also suggest that optimizing communication response times and applying suitable filtering techniques can significantly mitigate voltage fluctuations, improving overall grid performance and resilience. LOAD10 was selected as it is one of the most sensitive nodes under these operating conditions.
When analyzing the SOC of an EV connected to the grid, it is observed that the implementation of charging control results in a slight increase in the time required for the vehicle to reach a specific SOC level (see Figure 12). This delay is primarily influenced by the adjustments made to the charging power setpoint in response to grid conditions. An important aspect that requires further investigation is battery degradation, as repeated fluctuations in charging rates could impact on the long-term health of EV batteries. This factor will be explored in future research to assess the trade-off between grid stability and battery longevity.

Power and state of charge of an electric vehicle connected to load 10 when applying charging control (Davila-Sacoto, 2025).
Additionally, variations in the charging power setpoint must account for both the vehicle's inherent response time and the communication delays between the aggregator and the charging stations. Optimizing these parameters will be essential for ensuring efficient energy management while minimizing adverse effects on EV battery performance and grid stability.
When analyzing the impact of different PV penetration levels on EV charging behavior under charge control algorithms, significant variations in both power and voltage are observed. Figure 13 illustrates these variations across different penetration levels, highlighting the complex relationship between PV generation and grid stability.

Different levels of photovoltaic generation penetration (a) LOAD10 voltage (b) power of the feeder transformer (Davila-Sacoto, 2025).
Figure 13(a) reveals an interesting voltage behavior: at a penetration level of 0.6, the lowest voltage among all scenarios is recorded. However, at penetration levels of 0.1, 0.3, and 0.9, voltage levels in the load bar are notably higher. This suggests that intermediate penetration levels may introduce voltage instability due to fluctuations in supply and demand balance.
Additionally, Figure 13(b) displays the power behavior at the substation transformer, where a similar pattern is observed. A PV penetration level of 0.6 leads to a higher transformer power load compared to other penetration scenarios. This indicates that, under certain conditions, the interaction between PV generation and EV charging control can increase transformer stress, potentially affecting overall grid performance.
These findings emphasize the importance of carefully designing charge control strategies that dynamically adapt to PV penetration levels to mitigate voltage fluctuations and optimize transformer utilization. Future studies should explore adaptive algorithms that balance energy distribution while minimizing negative impacts on grid components.
To evaluate the robustness of the results, a sensitivity analysis was conducted by varying the key simulation parameters: communication delay time, PV penetration level, and EV penetration level. The results confirm that even small variations in these parameters can significantly influence voltage stability and transformer loading. For instance, increasing the communication delay from 100 ms to 500 ms led to a voltage drop of approximately 1.4% at critical nodes such as LOAD10. Similarly, varying PV penetration from 0.3 to 0.6 caused a shift in transformer load by up to 12%, demonstrating the nonlinear impact of renewable generation on grid dynamics. Furthermore, when EV penetration was increased beyond 50%, voltage fluctuation became more sensitive to changes in the charging setpoint, especially under high PV scenarios. These findings highlight the importance of considering latency and renewable penetration thresholds when designing control strategies. They also confirm the validity of using smoothing algorithms to mitigate voltage variations, as their effect remains consistent across different scenarios (see Figure 14).

Sensitivity of LOAD10 voltage to PV penetration and communication delay.
The effect of latency and charging control was quantified by tracking voltage deviations at LOAD10 under multiple delay and PV penetration scenarios. It was observed that increasing communication delay from 100 ms to 500 ms led to voltage drops of up to 3.2%. These deviations, although within operational limits, demonstrate the importance of real-time control, especially in high PV penetration cases where inertia is low. Furthermore, the application of smoothing algorithms reduced peak-to-peak voltage fluctuation by approximately 8%, highlighting their effectiveness in stabilizing grid performance under dynamic conditions.
Conclusions
The simulation of electrical grids with high PV penetration, incorporating EVs along with user connection profiles and residential loads, presents a significant challenge in microgrid research. To address this, it is essential to develop tools capable of integrating all key system components and their interactions. In this context, this paper introduces a co-simulation tool designed to incorporate realistic parameters of an electrical distribution grid, providing a comprehensive framework for evaluating the impact of PV generation and EV integration.
One critical aspect of intelligent EV charging control is the consideration of communication delays and the vehicle's response time when adjusting the charging setpoint. The study demonstrates that variations in delay times significantly influence voltage levels at load buses, highlighting the need for precise timing management to ensure grid stability.
The adoption of open-source platforms such as OpenDSS and Python for distribution system simulation offers several advantages. These tools allow the incorporation of additional parameters beyond those typically considered in traditional simulation software, enabling a more detailed analysis of real-world operating conditions. Furthermore, their flexibility supports seamless integration with other tools to model realistic load behaviors, vehicle charging patterns, microgenerator operations, and aggregator functions.
Additionally, this open-source approach facilitates rapid testing of different aggregator models, making it easier for researchers and engineers to conduct proof-of-concept evaluations and case studies. By streamlining the simulation process, it significantly reduces the time and effort required to analyze grid performance, optimize EV charging strategies, and assess the effects of high PV penetration on the distribution network. Future developments could further enhance these capabilities by integrating machine learning algorithms and real-time data analytics to improve predictive modeling and grid management.
The findings of this study have several practical implications for the design and operation of modern power distribution systems. First, the simulation results highlight the critical impact of communication latency on voltage stability, especially in networks with high EV and PV penetration. This underlines the importance of integrating low-latency communication protocols and responsive control algorithms in future smart grid infrastructures. Second, the observed effectiveness of smoothing algorithms suggests that grid operators can mitigate voltage fluctuations using relatively simple filtering strategies, even without extensive hardware upgrades. Finally, the modular and customizable nature of the proposed simulation platform allows system planners to evaluate different control strategies, test new technologies, and optimize energy management policies before implementation in real distribution networks.
Compared to traditional simulation platforms that focus solely on electrical behavior, such as standalone OpenDSS or MATLAB-based tools, the proposed co-simulation environment introduces several key enhancements. First, it integrates communication delay modeling, allowing researchers to evaluate the impact of latency on distributed energy resource coordination — a feature typically absent in other platforms. Second, the platform's modular structure and user-friendly HTML interface enable real-time customization of simulation parameters without the need for programming expertise, which lowers the entry barrier for system planners and non-specialist users. Third, it enables the study of combined phenomena, such as the interaction between EV charging behavior and PV intermittency, under dynamic and probabilistic conditions. These features open the door to more complex research questions, such as the trade-offs between latency and voltage stability, the effectiveness of smoothing algorithms under real-time constraints, and the comparative impact of EV penetration levels on different feeder topologies.
Future work
While this study focused primarily on the effects of EV charging latency and load control under high PV penetration, several other factors that can influence grid stability were not explicitly addressed. These include the topological characteristics of the distribution grid (e.g., radial vs. meshed configurations), stochastic load variability, and the presence of other distributed energy resources such as stationary batteries or wind generation systems. Incorporating these elements into future versions of the simulation platform will provide a more comprehensive understanding of the grid's dynamic response under increasingly complex operating conditions.
The current study explores key scenarios based on typical PV and EV penetration levels and a probabilistic user connection model. However, the range of simulations is limited, and the results may not fully capture the variability observed in real-world conditions. Future extensions of the simulation platform will include broader scenario modeling, such as varying EV charging patterns (e.g., fast charging vs. overnight charging), diverse residential and commercial load profiles, and weather-based irradiance patterns to simulate seasonal and daily solar generation variability. These enhancements will support a more comprehensive evaluation of smart grid control strategies.
A current limitation of the study is the absence of validation using measured data from real power distribution systems. While the IEEE European LV Test Feeder offers a reliable and widely accepted benchmark for low-voltage grid simulations, future work will focus on validating the simulation results against actual field measurements or laboratory testbeds. This will help confirm the accuracy of voltage response, EV load impact, and the effectiveness of control strategies under real-world conditions. Additionally, hardware-in-the-loop implementations and integration with SCADA test environments are being considered to extend the platform's applicability and reliability.
In this study, the analysis of communication latency has focused on its influence on voltage behavior at the low-voltage level, particularly in the context of setpoint propagation for EV charging. However, we acknowledge that latency can also impact other aspects of grid stability. For instance, in isolated microgrid scenarios or systems with high DER autonomy, delayed control actions may contribute to frequency deviations. Additionally, latency can cause localized congestion in distribution lines if load adjustments are not coordinated in time. While these aspects were beyond the scope of the current platform, we identify them as important research directions for future work. Incorporating frequency-response coupling and power flow congestion analysis will be valuable extensions to enhance the platform's realism and applicability.
Footnotes
Acknowledgment
The authors thank Universidad de Cuenca for easing access to the facilities of the Microgrid Laboratory of the Centro Científico Tecnológico y de Investigación Balzay (CCTI-B), for allowing the use of its equipment, and for authorizing its staff the provision of technical support necessary to carry out the experiments described in this article.
ORCID iDs
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.