
Abstract
The main factors affecting the displacement of micro-motion platform during the grinding process are spindle speed, cutting force, and piezoelectric ceramic input voltage model. This article, using the orthogonal test method, found a set of machining parameters which lead to less displacement deviation between practical test and theoretic analysis. First of all, single-factor experiments were carried out to study how spindle speed, cutting force, and piezoelectric ceramic input voltage model affect the experimental results, and then the orthogonal test was conducted. The experimental datum shows that voltage model was the most influential factor, followed by spindle speed and cutting force. The optimum combination of grinding parameters was obtained as spindle speed of 800 r/min, cutting force of 18 N, and voltage model radius of 12 µm. At this time, the average unit error of displacement of micro-motion platform was 9.13%.
Keywords
Introduction
With the development of science and technology, many products require higher machining accuracy, better surface quality, and longer service life. With the emergence of various of hard-to-cut materials, new difficulties appear in machining. The traditional processing method is difficult to meet the processing requirements. Compared with traditional cutting methods, vibration cutting has many advantages due to its special characteristics. Vibration-assisted cutting is a processing technology which combined vibration-assisted machining and cutting processes. Vibration cutting can effectively reduce cutting force, stress value, and cutting temperature, which is conducive to extending tool life and improving machining accuracy. 1 At present, two-dimensional piezoelectric drive is an effective way to realize two-dimensional vibration-aided machining. The micro-motion platform based on piezoelectric ceramics is a kind of micro-/nanomotion platform with piezoelectric ceramic stack as driving component and flexible hinge 2 –4 as guiding mechanism. It overcomes the disadvantages of mechanical, hydraulic, and pneumatic actuators, such as large inertia, slow response, and high-power consumption. It also has the characteristics of high speed and high positioning accuracy.
In recent years, the micro-motion platform driven by piezoelectric has been studied at home and abroad. Qing Yao et al. of the University of Illinois at Urbana Champaign 5 have developed a two-dimensional parallel micro-motion platform driven by piezoelectric ceramic stack. The parallel four-link flexible hinge is used as the elastic support and motion guiding mechanism. The micro-motion platform has an effective working range of 87 × 87 µm2, and two optical fiber sensors are added to the system to establish a closed-loop control system. The positioning accuracy of the ring is 20 nm. Sebastian Polit et al. of the United States 6 have designed a high-bandwidth piezoelectric-driven parallel motion nano-positioning platform. Through kinematic and dynamic analysis, it is shown that the mechanical structure of the platform achieves high bandwidth and good linearity and realizes the decoupling motion in the XY direction. In the two-dimensional micro-motion platform proposed by Yangmin Li et al. of the University of Macau, 7 the displacement amplification mechanism is used to make the stroke reach 117 µm, and the positioning accuracy is higher than 2 nm. Chen Qi of Changchun Institute of Optics, Chinese Academy of Sciences, 8 developed a two-dimensional micro-motion platform using aerostatic guideway to drive the worktable. At the same time, the piezoelectric ceramic micro-displacement mechanism and friction drive were combined to make the micro-motion platform travel 220 mm in the X direction, 300 mm in the Y direction, and 5 nm in the Z direction. Luo H et al. of Qingdao University of Technology, China, 9 investigated the effects of the cutting and vibration parameters on cutting force, surface roughness, and form accuracy in machining 7075-T651 aluminum alloy under an unidirectional ultrasonic vibration cutting condition, the results showed when the cutting tool speed and feed rate increased, the cutting force and cutting temperature of the ultrasonic vibrations increased in the X- and Y-directions.
In this article, a micro-motion platform composed of a piezoelectric ceramic stack, and a flexible hinge was used to provide micro-vibration in the direction of tool diameter for the end rotating grinding tool system with radial auxiliary vibration. Piezoelectric actuator has the advantages of high resolution, fast response frequency, and high output force. In the experimental process, spindle speed, grinding force, and piezoelectric ceramic input voltage model have a certain impact on the displacement of the micro-motion platform during grinding. In this article, the orthogonal test method is used to obtain the effect of the parameters on the displacement of the micro-motion platform. Some valuable articles in this aspect are referred for studying optimization test method. Kara F et al. of Technology Faculty, Düzce University, 10,11 studied a type of optimization method. Through surface roughness predicting by experiments of the DCTT-36 sample and results analysis, they found that artificial neural network was better than multiple regression method.
Mechanical structure
The experimental system is shown in Figure 1. The experimental system consists of a three-dimensional motion platform, a machining tool system, a micro-motion platform, a piezoelectric ceramic controller, an electric control box, and a set of displacement detection device. When the experimental platform is working, the industrial computer controls the piezoelectric ceramic controller (MDT693B of THORLABS, Newtown, New Jersey, USA) to output two voltage paths for two piezoelectric ceramic stacks through the control software. The piezoelectric ceramic stack outputs displacement while inputting voltage. The displacement output of the working platform in a certain direction is measured by a contact digital sensor (GT2-P12KF of Keyence Corporation, Osaka, Japan) with a measuring resolution of 0.1 µm. The type of piezoelectric ceramic stack is PK4GYP1, and the ceramic stack is made by THORLABS.
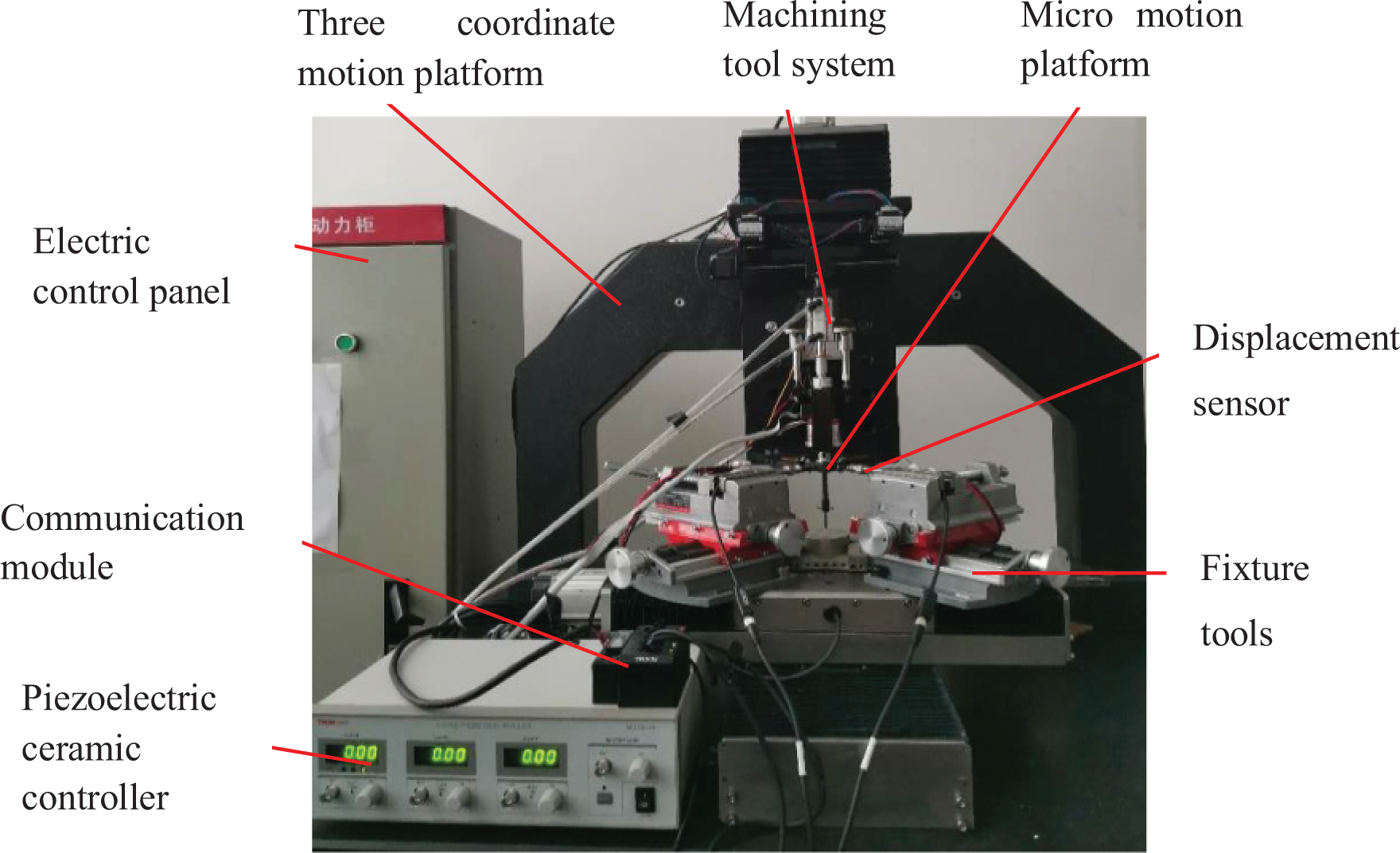
Experimental equipment diagram.
Experimental design and results analysis
Experimental design
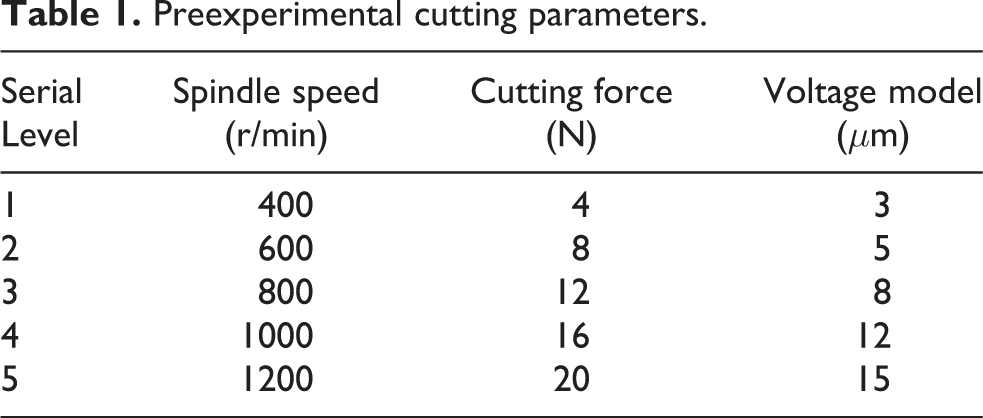
This article has designed five theoretical circle models, radius of them is r = 3 µm, r = 5 µm, r = 8 µm, r = 12 µm, and r = 15 µm, respectively. According to the voltage displacement conversion theory obtained in our previous studies, five input voltage models of piezoelectric ceramics were obtained. The five voltage models were represented by theoretical circle radius. The cutting parameters of the preexperiment are shown in Table 1. The selection criteria of preexperiment parameters are shown in Table 2. The evaluation index of the preexperiment is the average unit error of the vibration area relative to the radius of the theoretical model circle. Figure 2 shows the average unit errors under single-factor experiment. From Figure 2, when parameters of the voltage model are changed, spindle speed and cutting force are both set to constant value 0. The experimental result was expressed by the average unit error of the circular radius relative to the theoretical model. As the same, when spindle speed increases from 400 r/min to 800 r/min, the average unit error decreases gradually, but when spindle speed increases from 800 r/min to 1000 r/min, the average unit error increases rapidly. As for cutting force, when it changes from 8 N to 16 N, the average unit error decreases gradually, whereas when it changes from 16 N to 20 N, the error climbs again. The radius of voltage model increases from 3 µm to 8 µm, the average error decreases gradually, when the radius increases from 8 µm to 15 µm, the error arises slowly. Through the analysis of the experimental results, obviously a single factor has a strong impact on the displacement of the micro-motion platform.

Variation of average unit error. (a) Under variable spindle speed, (b) under variable cutting force, and (c) under variable input voltage for two piezoelectric ceramic stacks.
Preexperimental cutting parameters.
Combination of experimental factors in preexperiment.

The orthogonal experiment was designed to study how the parameter combination of spindle speed, cutting force, and voltage model affects the displacement of micro-motion platform. In order to explore the weight of the influencing factors and find the best processing parameters, the orthogonal test table of
Independent variables in orthogonal experiment.

Experimental results
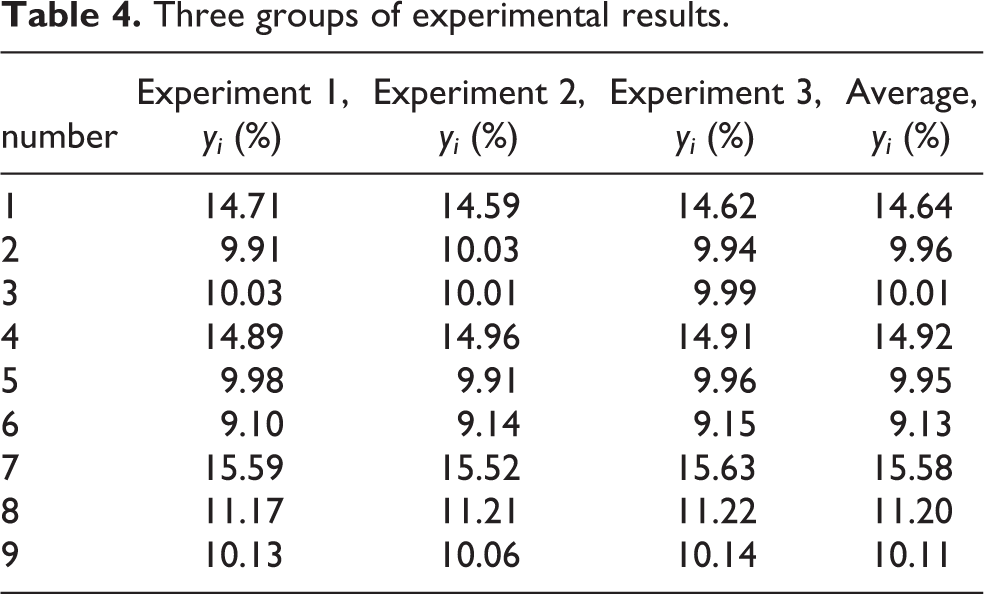
Figure 3(a) to (c) shows the experimental results of the three groups, each group has three experimental curves and a theoretical curve. In order to avoid accidental test results, each of the nine groups of tests was done three times, and the results of each test were recorded and averaged. The evaluation index of the orthogonal test is the average unit error of the vibration area measured by the experiment relative to the radius direction of the theoretical model circle, expressed as yi
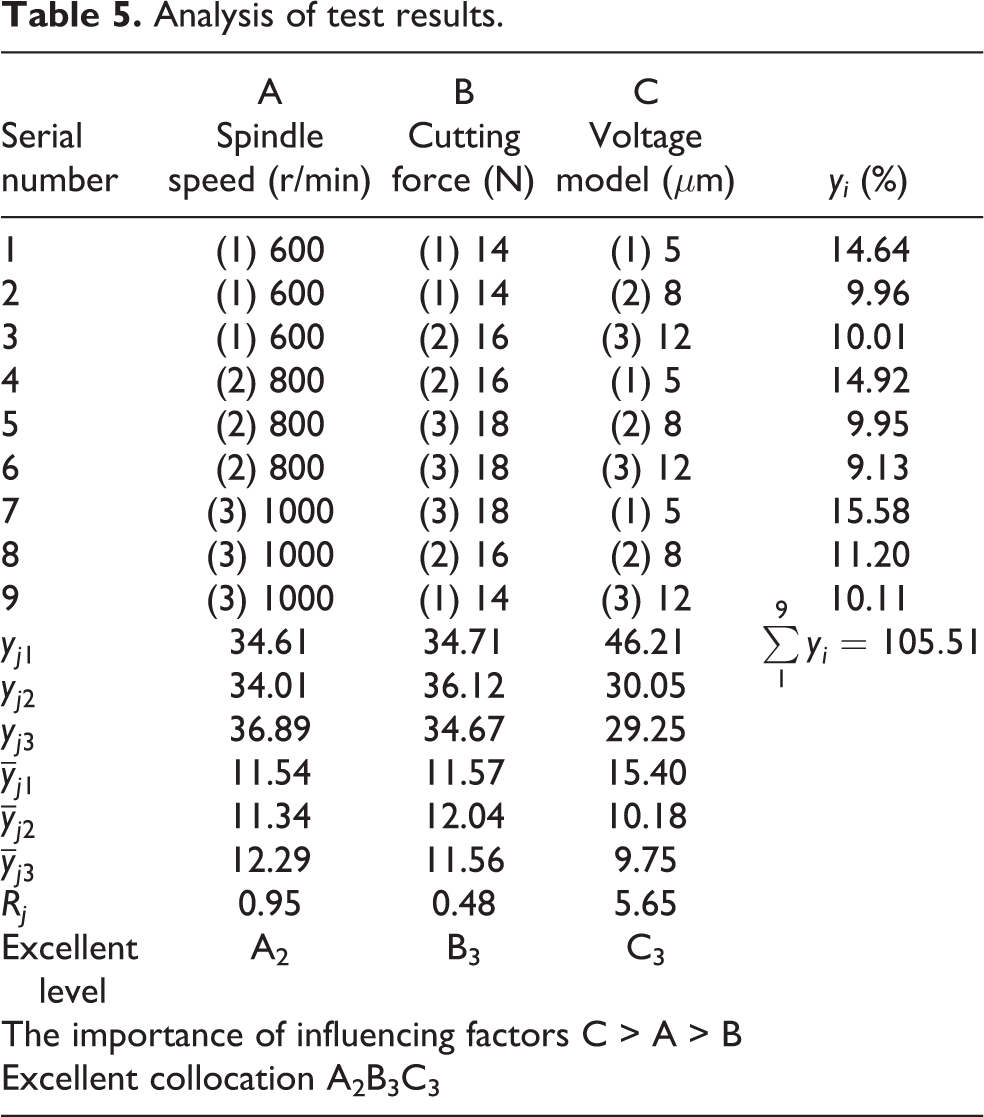
. The results are shown in Table 4. The average value of the obtained experimental results was brought into the orthogonal test table, as shown in Table 5. Rj
is the difference between the maximum value and the minimum value in the same column

Comparison between experiment and theoretical model. (a) Test 1, test 4, and test 7 with the theoretical model (r = 5 µm), (b) test 2, test 5, and test 8 with the theoretical model (r = 8 µm), and (c) test 3, test 6, and test 9 with the theoretical model (r = 12 µm).
Three groups of experimental results.
Analysis of test results.
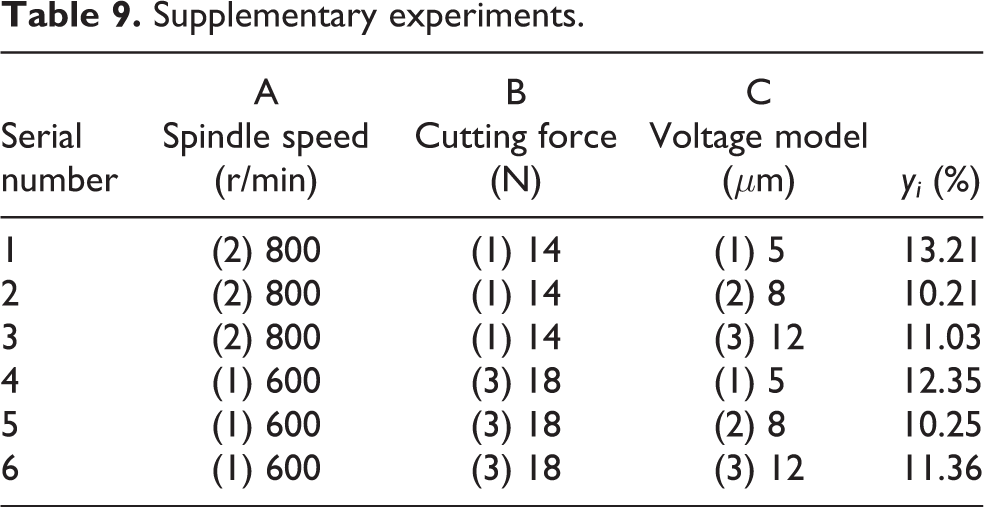
According to the preexperiment results, the factors caused the minimum average unit error of micro-motion platform vibration are listed as spindle speed of 800 r/min, cutting force of 16 N, and voltage model of 8 µm, which is not consistent with the result of orthogonal test. The reason for the phenomena is coupling interaction among three factors. The data analysis is shown in Tables 6 to 8. As shown in Table 6, there are no experimental results at A2B1 and A1B3 because the orthogonal test designed in this article did not involve the combination of A2B1 and A1B3. Now two kinds of combined input and three kinds of voltage model experiments have been added. The experimental results are shown in Table 9, and the average unit errors are greater than 9.54, so the optimized combination of spindle speed and cutting force is A2B3. It can be seen from Tables 7 and 8 that the optimal combination of spindle speed and voltage model interaction is A2C3. When cutting force and voltage model interact, the optimal combination is B3C3. According to the above experimental results, it is consistent with the optimum combination A2B3C3 obtained by orthogonal experiment. Three additional experiments were conducted with A2B3C3 parameter combination, the experimental results are shown in Table 10. It can be seen that the experimental results are similar to test 6 in the orthogonal test and are smaller than the other groups of experimental results in the orthogonal test. Therefore, it can be proved that the design of orthogonal experiment in this article is feasible.
Interaction between spindle speed and cutting force.

Interaction between spindle speed and voltage model.

Interaction between cutting force and voltage model.

Supplementary experiments.
Supplementary experiment of optimal combination.

Conclusion
This article studied the influence of spindle speed, cutting force, and voltage model on the displacement of the micro platform during the grinding process, and how does the displacement of the micro-motion platform change when a single parameter is changed. Through the analysis of orthogonal test results, it was concluded that when the average unit error was taken as the evaluation index, voltage model was the most important factor, followed by spindle speed and cutting force. The optimum combination of grinding parameters obtained was listed as spindle speed of 800 r/min, cutting force of 18 N, and voltage model radius of 12 µm. At this time, the average unit error of displacement of micro-motion platform was 9.13%.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (grant no. 51775237), Key R&D Projects of the Ministry of Science and Technology of China (grant nos 2018YFB1107600 and 2017YFA0701200), Key Scientific Research Project of Jilin Provincial Department of Education (grant no. JJKH20200972KJ).