
Abstract
Systematic and reproducible analyses of walkability and bikeability are crucial for efficient and effective interventions to promote active mobility. Previous methods for segment-based walkability and bikeability are limited in applicability due to high data requirements, a constrained set of aspects considered, or are not openly available and adjustable. The lack of transparency, limited reproducibility, and the high effort required to re-implement customized and extended variants of such methods inhibit wider application and retard knowledge gain. The open source software NetAScore aims to fill this gap. It is based on open and widely available data, provides default mode profiles for modeling utilitarian bikeability and walkability, and is designed for customization. General applicability and suitability of the software and its underlying models were shown in two evaluation studies. Source code and documentation are available on GitHub and via doi.org/10.5281/zenodo.7695369.
Introduction
Provision of adequate infrastructure is a prerequisite to facilitate and promote active mobility. Despite the increasing necessity to shift towards sustainable modes of transport, resources for implementing interventions are limited. Consequently, methods for analysis, monitoring and planning support should aim at improving efficiency while ensuring effectiveness of interventions. They should be applicable in a spatially inclusive and comprehensive way, without the need for time-consuming manual field work. While various approaches to capture bikeability and walkability have been proposed, including area-based and accessibility assessments (see Castañon and Ribeiro, 2021; Hasan et al., 2021; Kellstedt et al., 2021), we focus on the elementary, fine-grained level of road segment suitability. However, availability of data-driven models that assess infrastructure suitability for walking and cycling on segment scale is limited. For bikeability, besides others, methods such as LTS (Mekuria et al., 2012), BLOS (Highway Capacity Manual, 2010), or BikeScore (Redfin Corporation) were proposed. The methods by Bartzokas-Tsiompras et al. (2023); Koo et al. (2022) and Guzman et al. (2022) are examples for walkability assessments on segment scale. Detailed reviews are available for walkability (Hasan et al., 2021) and bikeability (Castañon and Ribeiro, 2021; Kellstedt et al., 2021). Still, present models bear limitations that restrain wider application: They either regard a minimum subset of indicators (e.g., Sorton and Walsh, 1994), depend on very specific and scarce input data (e.g., Highway Capacity Manual, 2010), require substantial manual effort (e.g., Hagen and Rynning, 2021), or are closed-source (e.g., Redfin Corporation, n.d). Especially the lack of transparency, limited adjustability of model parameters, and missing options to extend and further customize the models are barriers. Future research is required to address the individual and purpose-specific characteristics of bikeability and walkability to support inclusivity of our transport system. Therefore, openness, adjustability, and extendibility of models are crucial.
With this paper, we introduce NetAScore, an open source software for automated computation of segment-scale bikeability and walkability from open and widely available data sets. It targets several limitations of previous methods, supporting advances in open science within the domains of Urban Analytics, City Science, and Mobility. Results can inform assessment approaches that include accessibility or area-based metrics. By utilizing configuration files, general settings as well as model parameters can be customized, documented and shared. The software design also allows for individual extensions—that is, adding specific data sets and further indicators.
Method
NetAScore uses data from OpenStreetMap by default but allows for additional data sets to be added if available. The model derives indicators (such as cycling infrastructure, speed limit, and greenness) from input data which are then combined into a joint suitability index per road segment. In standard configuration it computes an index for bikeability following Werner et al. (2024a) and for walkability based on Stutz et al. (2024). The foundational concept of an indicator-based assessment goes back to Loidl and Zagel (2014). The software is implemented in Python and relies on PostgreSQL for storing and processing (spatial) data. A Docker image is available that includes all required components. In the following subsections we describe data, workflow and implementation in more detail. For more information regarding the bikeability and walkability assessment methodology as well as indicator selection and default model parameters please refer to the respective papers: Werner et al. (2024a) for bikeability, and Stutz et al. (2024) for walkability.
Data
NetAScore relies on a spatial graph representation of the transport network as essential input. It consists of nodes representing intersections, and edges which model the road segments linking intersections. Both are georeferenced to enable spatial operations. Using additional data layers, the software enriches the graph with information on spatial context. The present version of NetAScore uses edges of the graph as reference unit for assessment and index computation. The edges of the input network are expected to bear attributes that describe the type of infrastructure and its characteristics including access restrictions per mode.
The default, widely available, and most comprehensive data source for NetAScore is OpenStreetMap. Besides providing the graph representation of the transport network including geometric and descriptive edge attributes, it contains additional data layers such as building footprints, green space, and water bodies. The software is designed for extendibility to further network data sets. For use within Austria we implemented support for the Austrian authoritative road data set GIP. 1
For network graphs that do not contain elevation per node (e.g., OpenStreetMap), NetAScore derives it from a digital elevation model (DEM) as optional input. We recommend the use of terrain models with a spatial resolution of 10 m or finer.
Data providing information on the spatial context of each network edge, such as green space, water bodies, building footprints, pedestrian crossings, facilities, and (traffic) noise polygons can optionally be added. All of these except traffic noise are extracted from OpenStreetMap by default. However, custom data sets can be specified as input if needed. Further data layers may be added through extensions to the source code.
Workflow
The workflow consists of 5 main steps which are shown in Figure 1. Workflow overview.
First, network data is imported from local files or by querying OpenStreetMap data using the Overpass Turbo API. 2 If available and desired, optional data layers such as DEM and noise polygons are imported.
In the second step the network is preprocessed. The actions taken depend on the type of input dataset. For OpenStreetMap relevant features and attributes that represent the road network are retrieved followed by topological cleaning. During cleaning, intersections are corrected based on spatial proximity and attribute coherence of adjacent edges (i.e., overlapping intersections are merged). Input edges are split at intersections if needed to form a routable graph (while considering tunnels, bridges, and stacked layers) and dangling indoor links (e.g., partially mapped paths within buildings) are removed.
Indicators derived from input data.
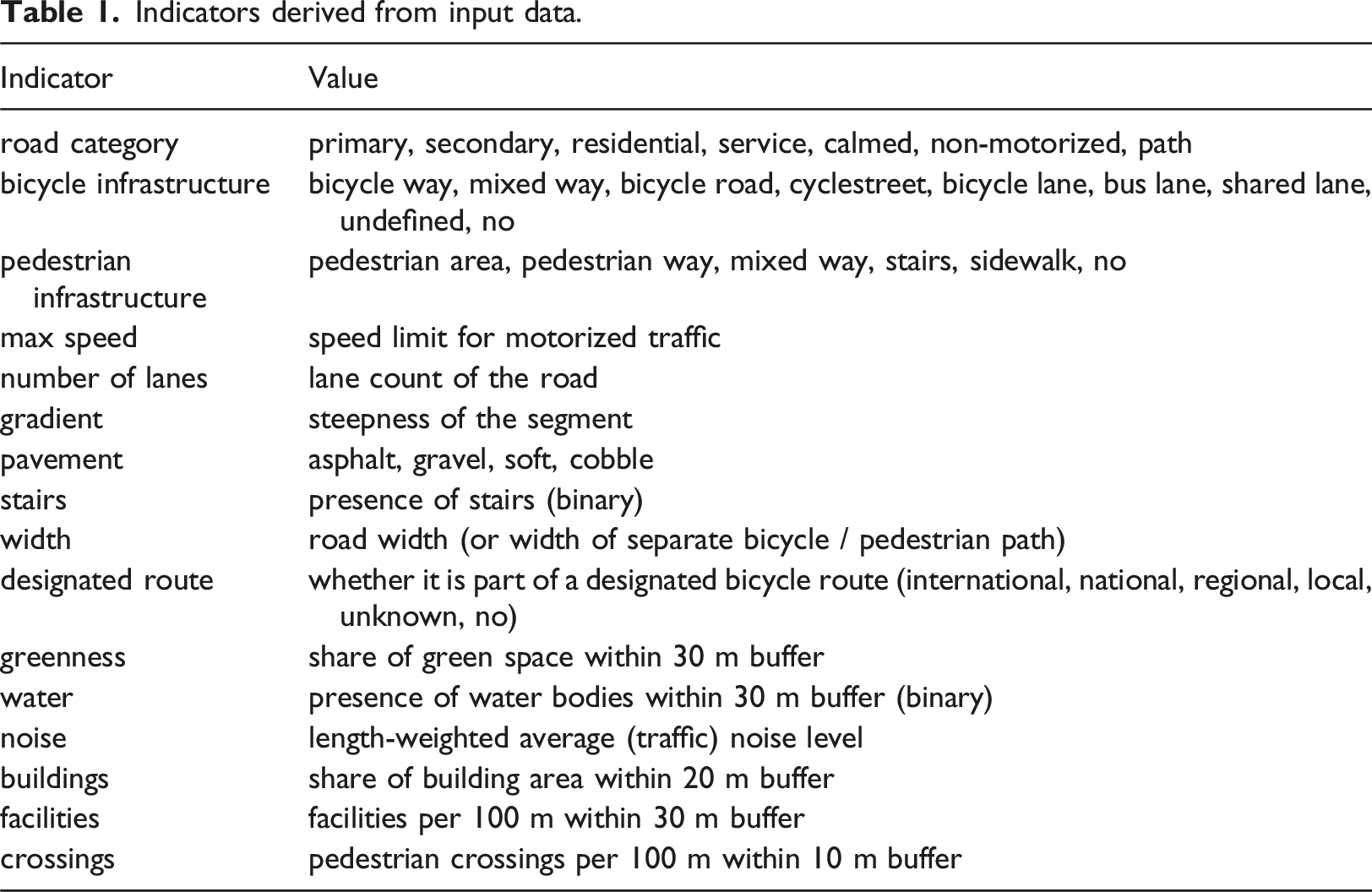
Index computation for each mode takes place in the next step. For this, raw numerical and categorical indicator values are first mapped to numerical values within the continuous unit interval [0.1]. These values represent the anticipated suitability associated with specific values of a single indicator, where 0.0 refers to unsuitable and 1.0 to very suitable infrastructure. Numerical indicator values are then combined into a joint, continuous suitability index per mode, computed as a weighted average. Unavailable indicators are omitted. The parametrization (i.e., default weights) is detailed on in the respective papers for walkability (Stutz et al., 2024) and bikeability (Werner et al., 2024a). To give a brief example, the bikeability index attributes the highest weight to road category, followed by the type of available bicycle infrastructure. Speed limit, gradient, road surface, and designated routes have equal contribution. For handling specific indicator combinations differently (i.e., to overwrite index values or indicator weights based on certain value combinations), custom value overrides can be defined. An exemplary override is defined for steep gravel sections as outlined in the definition of the bikeability model in Werner et al. (2024a). Resulting index values are continuous, ranging from 0.0 (lowest suitability) to 1.0 (highest suitability). As the step of index computation contains the core model logic, it is essential that all of its parameters can be customized as outlined in the Parametrization section.
The last step of the workflow it to export the assessed network including the computed index values and indicators.
Parametrization
A key feature of NetAScore is its flexible parametrization. Besides enabling workflow settings to be stored and documented for better reproducibility, the focus lies on the definition of model parameters. All weights and numerical indicator value mappings are defined at one place, forming the reproducible, transparent, and sharable definition of mode profiles. Two default mode profiles are currently included in NetAScore: a parameter set for bikeability in
Implementation
The implementation of NetAScore is based on Python for workflow automation. It relies on a PostgreSQL database with the PostGIS extension for data storage and for (spatial) operations to compute indicators and the compound indices. Figure 2 provides an overview of the software architecture. To streamline the setup and use of NetAScore, we provide a containerized version as Docker image. With a docker compose configuration available, the full setup including a PostgreSQL database can be obtained and executed with one single command. System overview.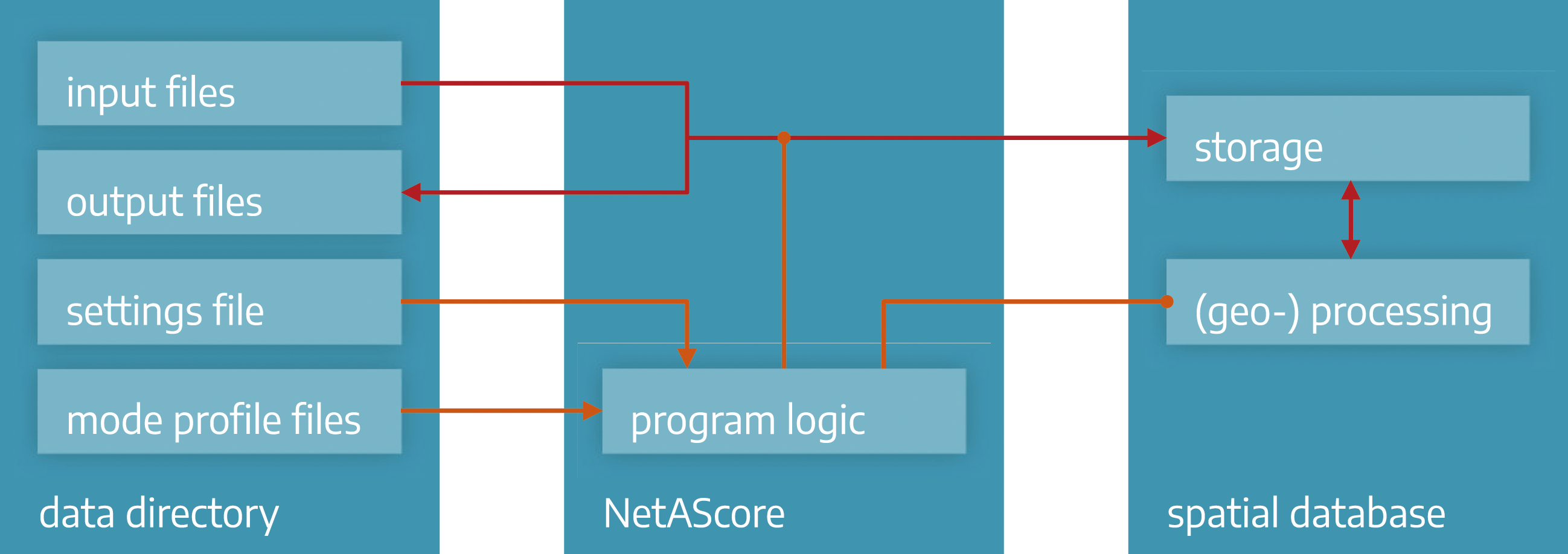
The software design and processing sequence follow the steps outlined in the Workflow section, with the import step subdivided into network (OSM), and optional file imports. All input and output files of NetAScore are stored in a
For ease of use, NetAScore can generate basic results for bikeability and walkability for city-scale areas of interest based on a place name as the only input. OpenStreetMap data is then queried using Overpass Turbo. However, elevation and consequently gradient will not be computed in such cases due to missing DEM input. GeoTIFF-based DEMs can manually be added and referenced in the settings file to enable gradient computation. The same applies to input data sets for optional data layers provided in GeoPackage format.
When working with a large area of interest (e.g., country-scale), OpenStreetMap data should be manually downloaded before in form of preprocessed subsets in OSM PBF or XML format, for example, from Geofabrik. 3 This file can then be set as input in the settings file.
As NetAScore uses spatial operations for joining data layers, coordinate reference systems (CRS) need to be properly set in input files and defined in the settings file. If running the software based on OSM queries, it determines the appropriate UTM zone from the centroid of the given area of interest. All reprojections necessary are then handled by the automated workflow. In the current version (v1.1.0), only metric CRS are supported and will yield proper results.
Workflow outputs are stored in a single GeoPackage file that contains the layers edge and node. Due to topological correction and preparation of a routable graph, the OSM id is not unique for edges. Therefore, edge_id is added as primary key. Column names with suffixes _ft and _tf refer to forward and backward direction along an edge. Computed index values are stored in index_name_ft and index_name_tf. The column index_name_robustness provides the sum of weights for all indicators that were available for the given edge. If activated in the settings file, index_name_explanation contains information on the influence of individual indicators.
More details, including a full list of dependencies, available settings, command line options, and a quick start guide are provided at github.com/plus-mobilitylab/netascore.
Applicability and examples
Applicability of the NetAScore software and general suitability of the default models for bikeability and walkability were shown by Werner et al. (2024a) and Stutz et al. (2024). The walkability and bikeability indices were also successfully used as impedance in routing applications, which form the core of pedestrian and bicycle flow models (Kaziyeva et al., 2021, 2023). Figure 3 presents exemplary results for segment-based bikeability and walkability processed with v1.1.0 (Werner et al., 2024b). NetAScore output files for several areas of interest are provided online (Werner, 2024). Exemplary results for bikeability and walkability (Salzburg, Austria).
Discussion and conclusions
The NetAScore software implements an automated workflow for assessing infrastructure suitability for active mobility on segment level. It provides default mode profiles for bikeability and walkability which were tested through evaluation studies. Core features encompass the flexibility, reproducibility, adaptability, and extensibility of the software which fill major gaps identified by Kellstedt et al. (2021). The use of OpenStreetMap data enables transferability of the method to various areas of interest. All of these features are important to allow for customized definitions of suitability which may depend on location, trip purpose, and individual requirements—for example, of most vulnerable road users. The software also sets a conceptual and technological foundation for interdisciplinary research to advance models, which was identified as important future direction by Hasan et al. (2021). We therefore encourage experimentation with different definitions of bikeability and walkability to represent more diverse perceptions of infrastructure suitability. This can contribute to achieving a more inclusive transport infrastructure. In contrast to previous approaches, NetAScore focuses on openness, transparency, and reproducibility combined with the use of open and widely available data. It creates the foundation for sharing customized and purpose-specific definitions of bikeability that can benefit the whole community in active mobility research.
Due to the lack of appropriate data, the software currently does not assess intersections. As these can be important for assessing overall route suitability, future research, and implementation should focus on filling this gap. For many practical applications the segment-based indices should be input to advanced assessment methods that consider network connectivity and accessibility.
Despite current limitations, researchers, planners, and the general public can benefit from the use of NetAScore through streamlining processes and providing well-targeted interventions that can better address inclusivity.
Supplemental Material
Supplemental Material - NetAScore: An open and extendible software for segment-scale bikeability and walkability
Supplemental Material for NetAScore: An open and extendible software for segment-scale bikeability and walkability by Christian Werner, Robin Wendel, Dana Kaziyeva, Petra Stutz, Lucas van der Meer, Lea Effertz, Bernhard Zagel, and Martin Loidl in Environment and Planning B: Urban Analytics and City Science
Footnotes
Acknowledgments
We thank everyone who provided feedback, tested applications that utilize outputs of NetAScore and who contributed to the development of NetAScore. Special thanks to all participants of our evaluation studies for walkability and bikeability.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by TraffiCon GmbH and Triply GmbH through contracted research and development. Furthermore, funding of the following recent research projects supported the development of bikeability and walkability concepts as well as code development: SINUS (BMK, FFG No. 874070), POSITIM (BMK, FFG No. 873353) and On-Demand II (BMK and BMAW, FFG No. 880996).
Correction (November 2024):
The article has been updated with the funding statement since its original publication. See correction notice for more details.
Data availability statement
The latest version of the NetAScore software, its source code, as well as full documentation are available on GitHub and via doi.org/10.5281/zenodo.7695369. Exemplary data sets are available via ![]()
Supplemental Material
Supplemental material for this article is available online.
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.