
Abstract
The shape and distribution of the most integrated streets, collectively called the integration core, is critical to the characterization of local and global street network types in the space syntax literature. The description of the shape, position, and distribution of integration cores relative to the underlying street networks, however, has remained largely intuitive. We propose analytic and algorithmic definitions of integration core types. We then study empirical and experimental superblock designs with rectangular boundaries, as a particular kind of urban spatial syntax. The analysis leads to a clear understanding of the different ways in which the local street network, internal to the superblock, is structured and interfaced with the perimeter. When used as part of an automated sorting and query process applied to a universe of experimentally generated designs, our definitions and algorithms provide new insights about the interplay between the local generators of street network differentiation and the emergent syntactic structures of the superblock as a whole.
Introduction: Integration cores
In the field of space syntax, the set of streets that have the highest syntactic integration (equivalent to network closeness centrality) in a street network is referred to as the integration core (Hillier & Hanson, 1984: p. 115). The distribution of the integration core over a street system is systematically related to the distribution of movement and the land uses that are sensitive to movement (Chiaradia et al., 2012; Hillier, 1996, 1997; Hillier et al., 1993; Ozbil et al., 2011; Peponis et al., 1989; Scoppa & Peponis, 2015). The most integrated spaces are where people can expect to find other people, goods, services, or information, essentially acting as “an encounter interface and a search interface” (Peponis et al., 1989).
The study of integration cores, at various scales, has addressed their overall shape and distribution relative to the underlying urban systems, as well as the effects of such distribution. It has brought a better understanding of a variety of phenomena ranging from the distribution and interrelationships of vibrant urban centers, local or global, within larger metropolitan areas, to the distribution of pedestrian movement within local urban areas, or the patterns of vandalism, decay and avoidance associated with individual housing estates (Hillier, 1988, 1999; Hillier et al., 1987). However, with the exception of the definition and quantification of the strength and the spread of the integration cores proposed by Peponis et al. (1989), descriptions have largely been intuitive, as exemplified by Hillier (1988)’s account below:
The integration core is probably the most important deep structure of the town plan. Its structure will vary from one type of town to another, but can usually be described as some part of the deformed wheel core (which we therefore believe to be fundamental). For example, we find covering cores (hubs and spokes without the rim), centralized cores (hub only), peripheral cores (rim only), penetrating cores (one spoke and part of the rim), linear cores (one series of lines), and so on. Cores of any of these morphological types can then be localized in one part of the plan or globalized in the plan as a whole; shallow or deep in the plan; fragmented or unified, and so on. (p. 69)
Such accounts, while insightful, are not devoid of interpretative ambiguity since the same integration core can be perceived and interpreted differently. What complicates the matter further is the fact that the definition of integration cores is subject to explicit but arbitrary conventions. An integration core is typically identified by selecting the 10% (or 5% for large cities) most integrated lines in an axial map (Hillier et al., 1983). Since these percentages are not informed by the overall distribution of the integration values in a street system, their indiscriminate use to define the “deep structure” of towns is questionable.
We propose a new parametric definition of integration cores and core types and introduce algorithms that identify them. Using experimental and empirical examples, we show that the definitions and algorithms allow us to distinguish different types of integration cores and different ways that the same type of integration core can be realized. The same definitions and algorithms can also be used to automatically sort universes of designs. Thus, when combined with a rule-based design generation process, they provide new insights on the interplay between local generators of street network differentiation and the emergent syntactic structures. By enabling the dialog between three kinds of algorithms—generative, analytical, and query algorithms—this study complements and extends previous work on syntactic typologies (Feng & Peponis, 2020).
A reformulation of integration cores and their types
A parametric definition of integration cores
To identify the integration core, we first measure the syntactic integration of each line segment by calculating the length-weighted average of directional distance (DDL) from the segment to all the other segments in the network (Feng & Zhang, 2019; Peponis et al., 2008). Directional distance is measured in terms of direction changes, as is the case with ‘syntactic depth’ in traditional axial analysis, where to move from one axial line to another is, by definition, to change direction. However, DDL is based upon a parametric threshold of the minimum angle required for the identification of direction changes; small path rotation angles can thus be ignored.
We then group the line segments into continuity lines. A continuity line, as similarly defined by Figueiredo and Amorim (2005), contains one or more street centerline segments that collectively delineate a maximally extended path along which no direction changes are involved. The threshold angle to determine whether there is a direction change in transitioning from one street segment to another is set at 20°. Each continuity line also has a DDL value, calculated by taking the length-weighted mean of the DDL values of the line segments it comprises. We define the integration core by selecting the continuity lines whose DDL values are at least a certain number (denoted as β) of standard deviations below the mean DDL of the whole street network.
This definition has two advantages: first, the integration core is parametrically defined with respect to the overall distribution of values; second, it explicitly promotes the longest integrated streets into the integration core. This is consistent with the way in which Hillier (2002) defined the primary street grid, or supergrid, as the longest lines that link up to connect an urban system.
Algorithmic definitions of types of integration cores
We study the types of integration cores in the context of superblock design. We define a superblock as a rectangular urban area bounded by arterials and main streets, with sides varying between 600 m (close to ½ mile) and 1600 m (1 mile). Superblocks are important organizing units of urbanism. The internal street network of a superblock can take many different forms (Peponis et al., 2015, 2016, 2017). When superblocks are juxtaposed with each other to create a larger urban system, the integration core of the whole system will most likely comprise the arterials and main streets that contain the superblocks. This is graphically shown in Figure 1, which is extracted from the Phoenix Metropolitan Area in the USA. Accordingly, on the assumption that the global integration core will run along the edges of the superblocks, the integration core of the street network internal to the superblock is essentially the interface between local and global scales of integration. One can rightfully object that when superblocks are linked into systems, as in Figure 1, the total street network influences the integration core within each superblock. Our approach, which treats each superblock independently of others, is indeed a simplification. In addition to helping to keep the argument simple and the demonstrations easier to follow, however, our simplification has two further merits: first, it focuses attention on the local relationships that are likely to be familiar to superblock inhabitants; second, it focuses attention to urban structure at the operational scale of most development and design decisions in contexts where superblocks prevail. The street network of nine superblocks in Phoenix, Arizona, with the pattern of centrality (as measured by DDL) highlighted. The color spectrum from red through orange and yellow to green and blue corresponds to the range from high integration (low DDL) to low integration (high DDL). The center of the area is located at 33°31′39.882″ N, 112°4′41.142″ W. The lines comprising the integration core are shown with a heavier line weight—see below for exact definition of integration core as the spaces whose DDL is at least half a standard deviation below the mean.
Presence of hubs, foci, rims, and spines in each type of integration cores.

The algorithm we developed to identify the type of the integration core in a superblock design involve the following steps. 1. Run DDL analysis for each street centerline segment and get the mean and standard deviation of all the DDL values, denoted as D̅ and S
d
, respectively. 2. Group the street centerline segments into a set of continuity lines, denoted as 3. Select the continuity lines in 4. Count the number of spines (i.e., N
s
) and the number of rims (i.e., N
r
) in ℂ. 5. If N
s
> 0, then check if there are any intersections between the spines. Based on how far away the intersection is from the geometric center of the superblock, determine whether it should be counted as a “focus” or a “hub.” Count the total number of foci (i.e., N
f
) and the total number of hubs (i.e., N
h
). 6. Return the type of the integration core based on the following rules: (a) If Nh > 0, then it is a radial-type integration core. (b) If Ns > 0 and Nf = 0, then it is a spine-type integration core. (c) If Ns = 0 and N
r
> 0, then it is a rim-type integration core.
 . Compute DDL for each continuity line.
. Compute DDL for each continuity line. whose DDL ≤ D̅ - β × S
d
. Those continuity lines comprise a new set ℂ, which represents the integration core. (β, as mentioned, is the parameter used in defining how different the integration core should be from the rest of the system.)
whose DDL ≤ D̅ - β × S
d
. Those continuity lines comprise a new set ℂ, which represents the integration core. (β, as mentioned, is the parameter used in defining how different the integration core should be from the rest of the system.)
Note that the “deformed wheel-like” integration cores frequently discussed in the space syntax literature can be treated as special cases of the radial-type integration cores comprising one or more rims (i.e., N
r
> 0). In the context of a superblock design with a rectangular boundary, we can define a full-deformed-wheel-type integration core to be a radial-type integration core with four rims (i.e., N
r
= 4). Figure 2 shows the schematic expressions of the different types of integration cores (with all possible non-equivalent arrangements included, assuming that there can be at most two intersecting spines—be they horizontal, vertical, or diagonal). Schematic expressions of the different types of integration cores. In every row, the number of continuity lines lying on the boundary of the superblock (as part of the integration core) gradually increases from left to right.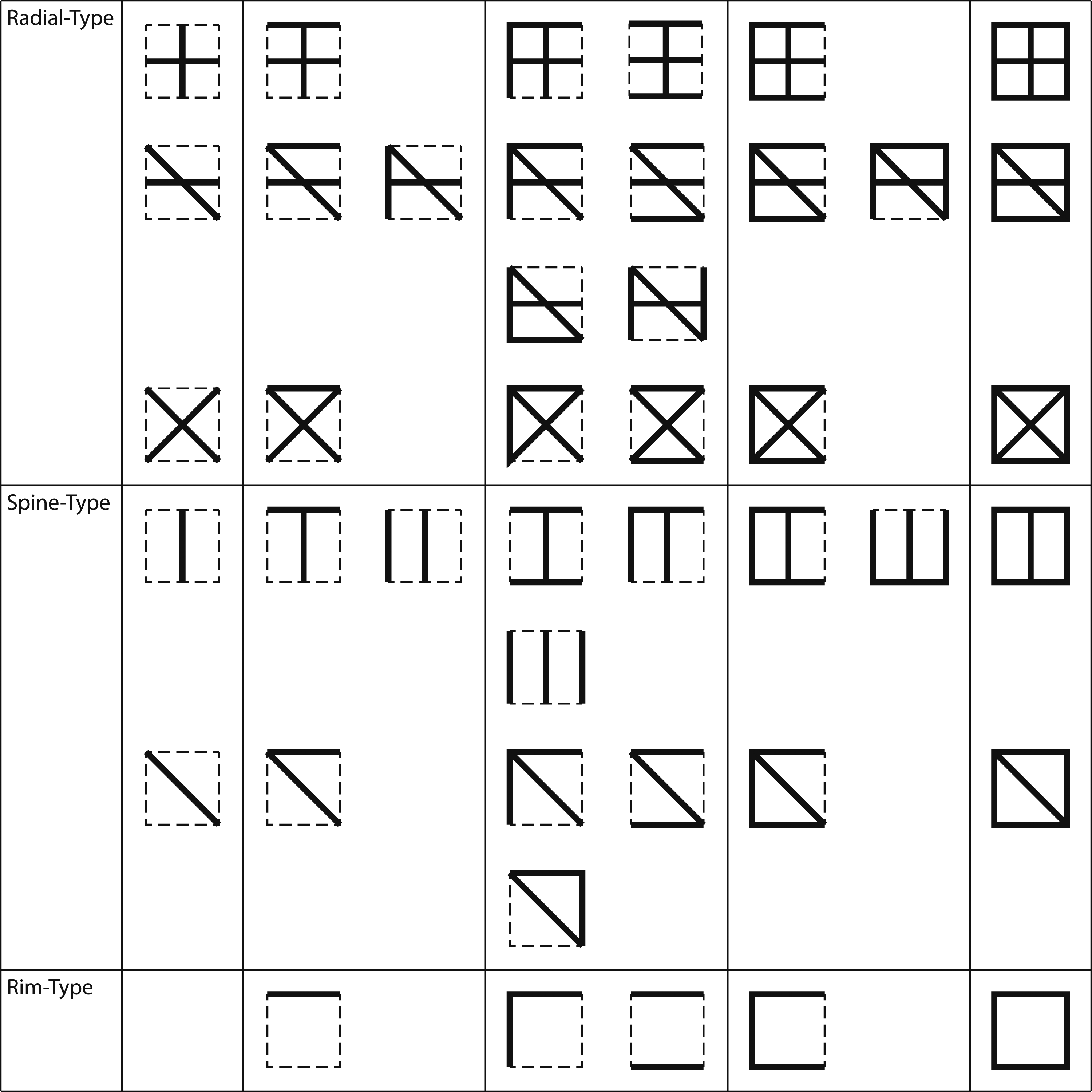
The generation of experimental street network designs
As a test, we applied the algorithmic definitions of the types of integration cores on 5400 experimental street network designs. To generate the designs, a 9 × 9 square grid—which is syntactically neutral or undifferentiated—was taken as a starting point. The grid was represented as a graph, with vertices, edges, and cells. An edge is a straight street centerline segment. Whenever two or more edges meet, there is a vertex. Dangling edges that represent cul-de-sacs also have vertices located at their dead-ends. A cell, representing an urban block, is the polygonal area bounded by a chain of edges. Based on the street graph representation, we deformed the original square grid by repeatedly applying one of the eight syntactic operators shown in Figure 3 on random parts of the grid. Syntactic operators applied to simple square grids in order to generate a variety of designs.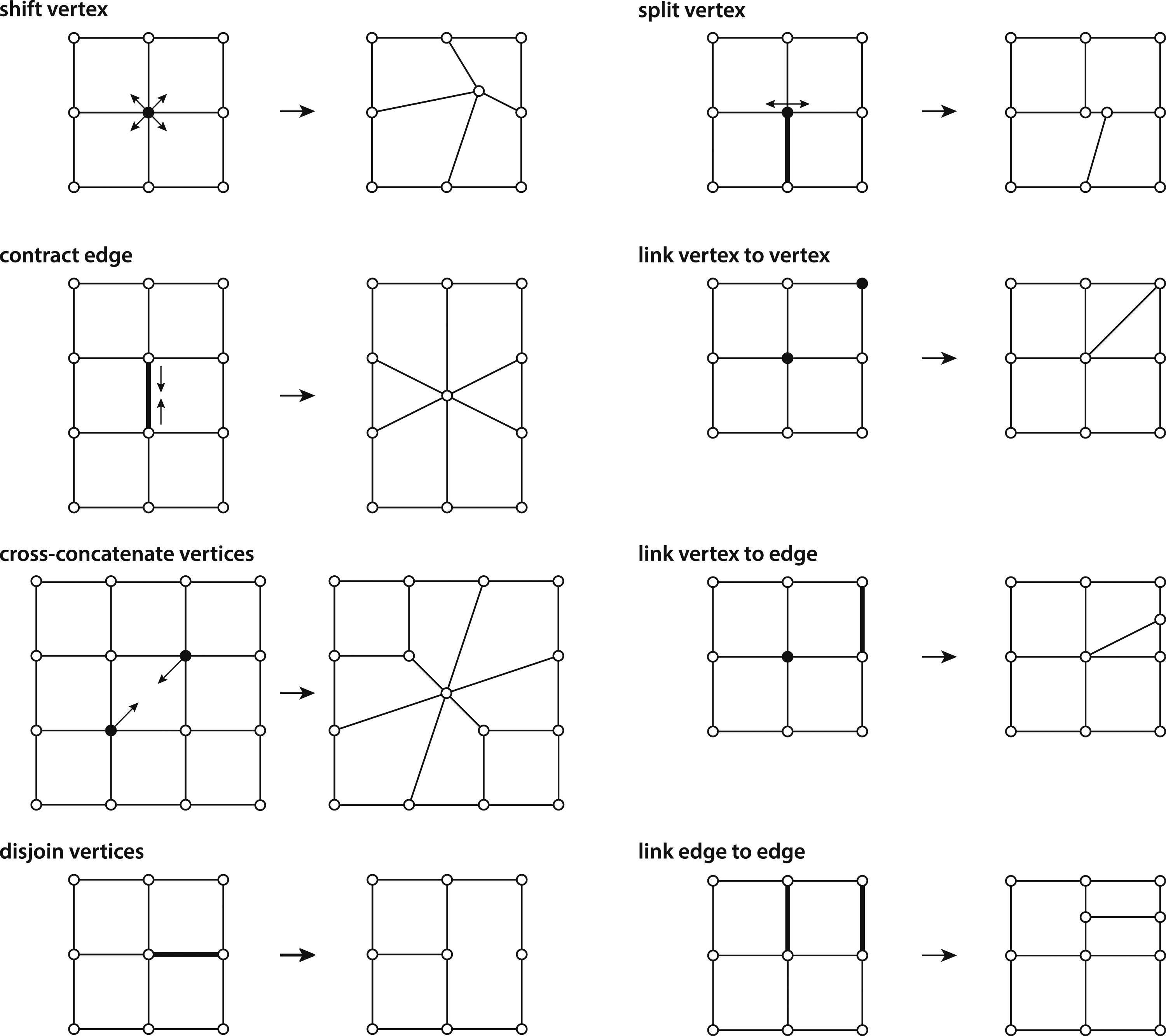
Eight groups of 600 designs, corresponding to the eight syntactic operators, were generated. An additional group of 600 designs was added by randomly applying the operators of disjoining vertices, linking edge to edge, shifting vertex, splitting vertex, and cross-concatenating vertices. We will refer to each of the first eight groups of designs by the name of the syntactic operator used. The additional group will be called mixed.
Emergence of different types of integration cores
The algorithmic definitions of integration core and its types were applied to the experimental universe of street network designs. Below, we review results concerning the proportion of street length that lies on the integration core, which we call ‘relativized size’ and the proportion of the various types of integration cores associated with the various syntactic operators. The relativized size of the integration core is a robust indicator of the degree of differentiation of the local main streets from local ordinary streets. The greater the proportion of the street network that lies on the core, the less the main streets stand out from the rest of the fabric. We will come back to this later. The proportion of core types associated with each generator is an indicator of the degree to which we can predict syntactic structure from generative operators.
The size of the integration core
The street length covered by the integration core depends on the total street length in the design, the overall distribution of integration values, and the parameter β. To facilitate comparison between designs of various sizes, the relativized integration core size is calculated by dividing the total length of the continuity lines that comprise the integration core (without double counting any overlapped portions of continuity lines) by the total street length present in the design.
Obviously, the relativized size of the integration core increases as β decreases (i.e., as the criterion of what makes up an integration core is gradually relaxed). The trajectories of such growth, however, are different (Figure 4(a)). The designs generated by the linking operations exhibit a “step-like” growth pattern: when β is close to one, the size of the core is either zero or extremely small because hardly any line meets the criteria to be counted as part of an integration core; as β decreases and approaches 0.6 or so, there comes a sudden, dramatic growth of the core, which tends to cover almost the entire network; then the growth rate sharply declines. Trends regarding the relativized size of the integration core and the formation of different types of cores as the parameter β decreases. (a) Line graph showing the change in the median relativized integration core size as β decreases. (b) Line graph showing the change in the number of designs that have a radial-type integration core as β decreases. (c) Line graph showing the change in the number of designs that have a spine-type integration core as β decreases. (d) Line graph showing the change in the number of designs that have a rim-type integration core as β decreases.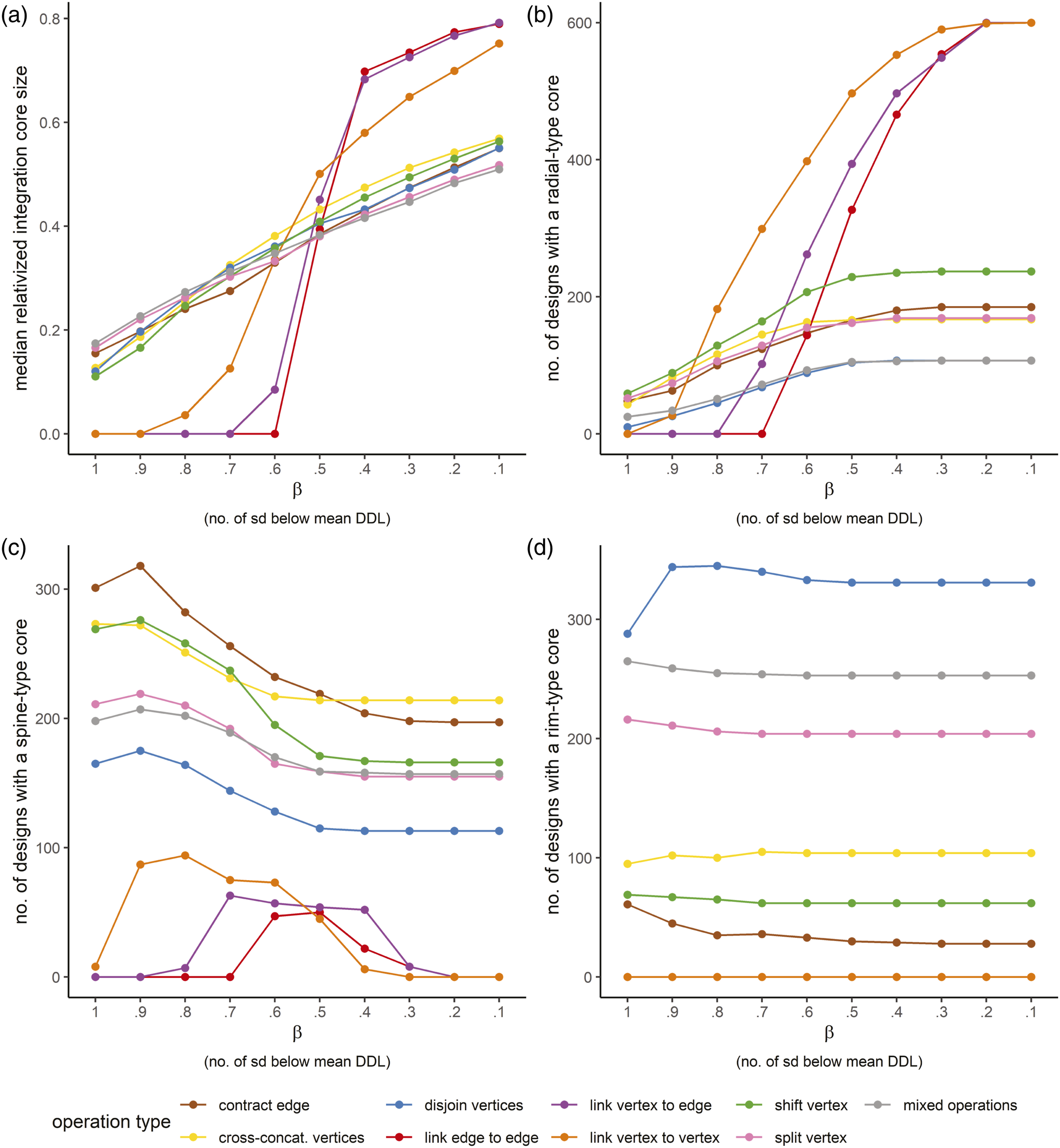
The “step-like” growth pattern reflects how the DDL values are distributed in a design generated by the linking operations: there is usually a cluster of low DDL values assigned to the main, traversing streets and another cluster of DDL values assigned to the local, infill streets nested inside the square blocks. The two clusters of values are very different from each other. But within each cluster, the values are very similar. Therefore, depending on the value of β, the many traversing streets are either missed out or captured altogether as part of the integration core. This is an important characteristic of a “two-level” street system.
By contrast, the designs generated by the other syntactic operators generally exhibit a “ramp-like” growth pattern as β is decreased, which suggests that for those designs the DDL values are more continuously differentiated along the full spectrum of values.
The types of integration cores among each group of designs
With β fixed (meaning that the integration core is defined according to exactly the same criterion), the frequency of designs with a specific type of integration core differs for the different groups of designs. Also, as β deceases from 1 to 0.1, the frequency of designs with a specific type of integration core follows different trajectories for the different design groups (Figure 4). Examples of experimental designs with the different types of integration cores are shown in Figure 5. Examples of conceptual street network designs with different types of integration cores (with the integration core defined as the set of continuity lines whose DDL is at least 0.5 standard deviations below the mean DDL of the design). One example is drawn from each group of designs to show each type of integration cores, arranged in the following order: (first row from left to right) contract edge, cross-concatenate vertices, disjoin vertices, shift vertex, split vertex, (second row from left to right) mixed operation, link edge to edge, link vertex to edge, link vertex to vertex. Note that among the designs generated by the three linking operations, we found none with rim-type integration cores.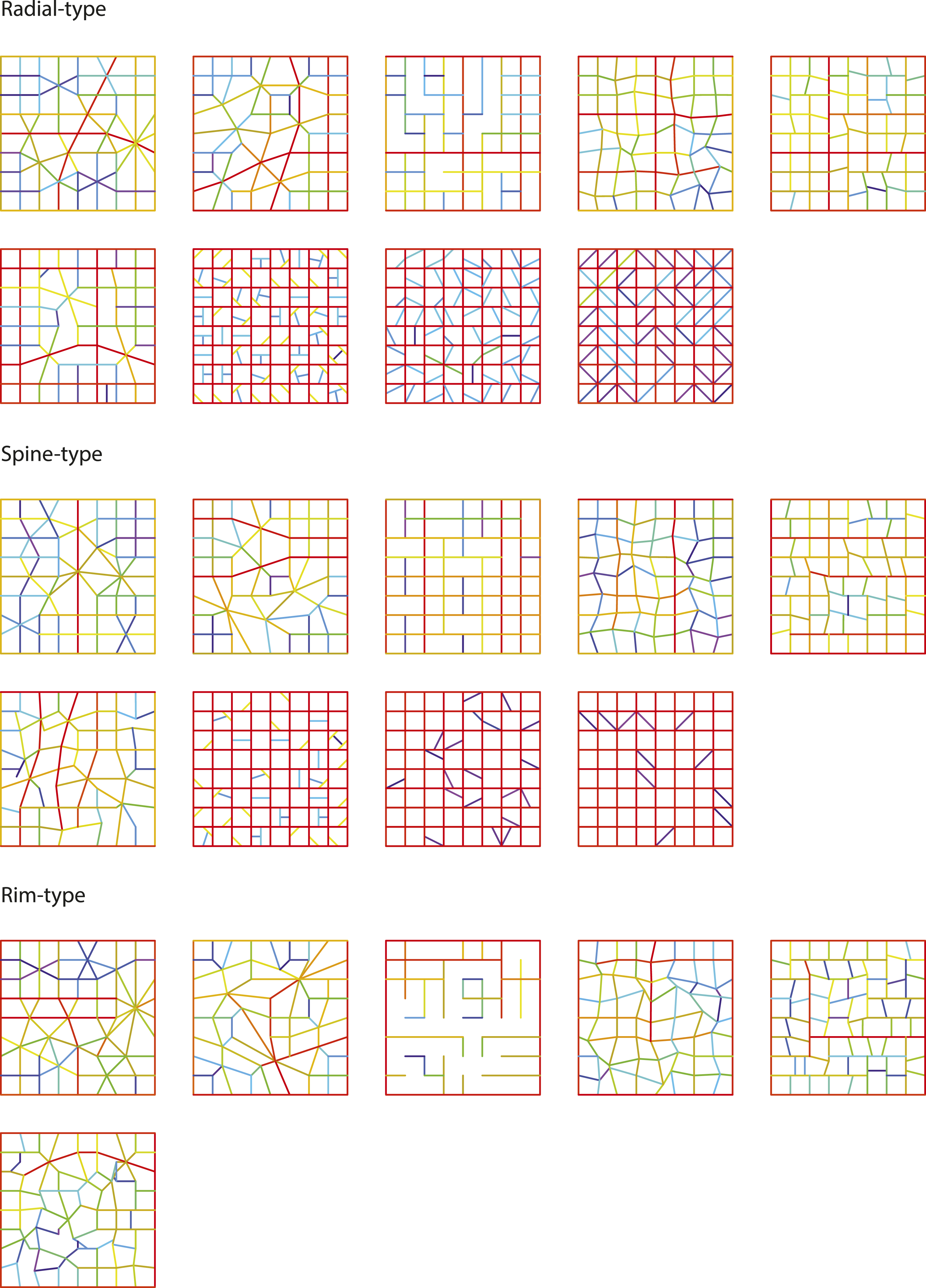
The frequency of designs with radial-type integration cores in each group. For the groups of designs generated by the linking operations, as β decreases, the frequency of designs with radial-type integration cores follows steep trajectories—the frequency is zero when β = 1, then, soon after β decreases to 0.8 or so, it starts to increase rapidly, eventually reaching 600 (meaning that all the designs in each of those groups have a radial-type integration core) when β decreases to 0.1. The steep trajectories reflect the polarization of DDL values. By contrast, the trajectories exhibited by the other groups of designs suggest a much gentler increase in the frequency of radial-type integration cores as β decreases, and they stabilized after β is decreased to 0.5 or so. The group of designs generated by disjoining vertices consistently had the fewest designs with radial-type integration cores (Figure 4(b)).
The frequency of designs with spine-type integration cores in each group. For the groups of designs generated by the linking operations, as β decreases, the frequency of designs with spine-type integration cores increases at first, then stabilizes for a short while, and finally drops to zero. The trajectories can, again, be explained by the polarization of DDL values and the pattern of traversing streets: when β is near 1, hardly anything meets the strict criterion to be counted as part of the integration core, therefore there is little chance of forming spines; as β decreases, some traversing streets become included in the integration core, leading to the initial increase in the frequency of spine-type integration cores; after β decreases to 0.3, however, many traversing streets are included in the integration core, reducing the chances of a spine-type core instead of a radial-type core. By contrast, for the other groups of designs, the frequency slightly increases at first, then gradually decreases, and eventually stabilizes at a moderate level (Figure 4(c)).
The frequency of designs with rim-type integration cores in each group. Among the groups of designs generated by the linking operations, none has a rim-type integration core because of the highly integrated internal structure formed by the main grid. For the other groups of designs, the frequency of rim-type integration cores does not change much as β decreases from 1 to 0.1—the trajectories all seem flat. The group generated by disjoining vertices consistently has the most designs with rim-type integration cores (Figure 4(d)).
The different potentials of forming the different types of integration cores
Our analysis shows that while the type of syntactic operator used to generate the designs does not necessarily determine the type of integration core, it affects the probability of designs with specific types of integration cores, across a range of β values. An important deciding factor is whether the syntactic operator tends to either preserve or form new traversing streets in the street network. For example, the operator of disjoining vertices tends to disrupt the existing traversing streets inside the superblock, which increases the probability of forming rim-type integration cores. On the contrary, the operator of linking edge to edge only creates local infill streets and never alters the existing traversing streets. Therefore, when applied on a square grid, it never produces designs with rim-type integration cores.
The significant margin of independence of the type of deformation of a regular street grid, relative to the type of the emerging integration core, suggests that the syntactic structure as expressed by the shape of the integration core has to be treated as a design evaluation criterion in its own right.
Application to empirical examples
The algorithmic definitions of integration cores and types are also applied to empirical examples of superblocks, including the design of an exemplary “neighborhood unit” by Perry and Whitten in 1929, the design of Sector 19 of Chandigarh by Le Corbusier and his team in the 1950s, the design of Sector G-7 of Islamabad by Doxiadis in the 1960s, a superblock in the central district of Beijing, a superblock in Nagoya, Japan, and three superblocks from the US—located in Chicago, Los Angeles, and Phoenix, respectively (Figure 6). The side lengths of those superblocks range from slightly below half a mile to just over one mile. The internal street networks are different, in terms of density, linearity, and continuity. The internal street networks of eight superblocks, with the patterns of centrality (as measured by DDL) highlighted. The color spectrum from red through orange and yellow to green and blue corresponds to the range from high integration (low DDL) to low integration (high DDL). The lines comprising the integration core (defined by setting β to 0.5) are shown with a heavier line weight.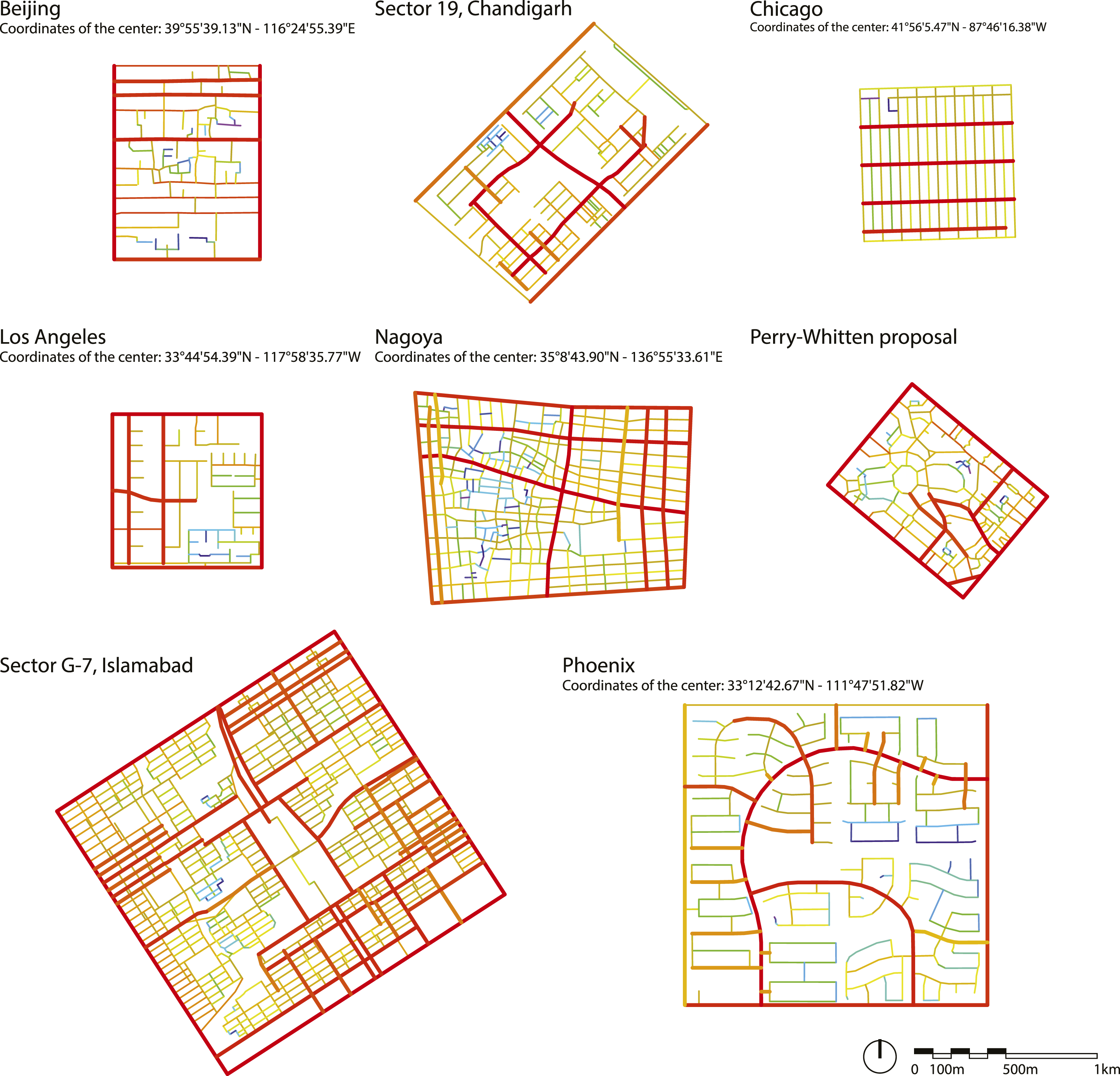
As with the experimental designs, we observe both the “ramp-like” and the “step-like” growth trajectories regarding the integration core size as β decreases (Figure 7). The “step-like” growth trajectory suggests that a large proportion of the street network is integrated at an above-average level but largely undifferentiated within itself. This is the case for the superblocks from Beijing and Chicago because of the presence of many traversing streets that are syntactically undifferentiated. Line graph showing the change in the relativized integration core size for each of the eight superblocks as β decreases. The vertical dashed line picks up β = 0.5, the value of β used to produce the integration core for Figure 6.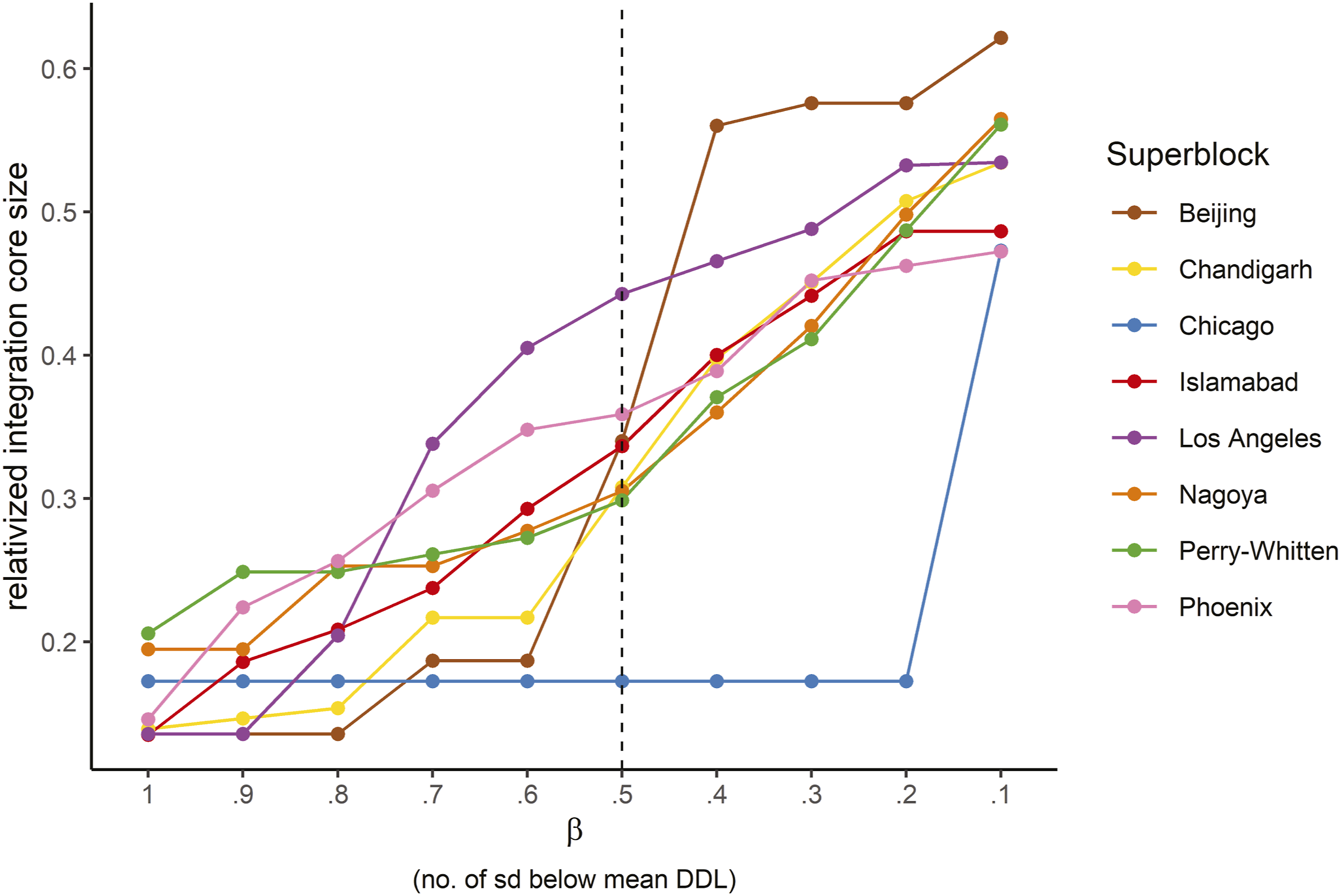
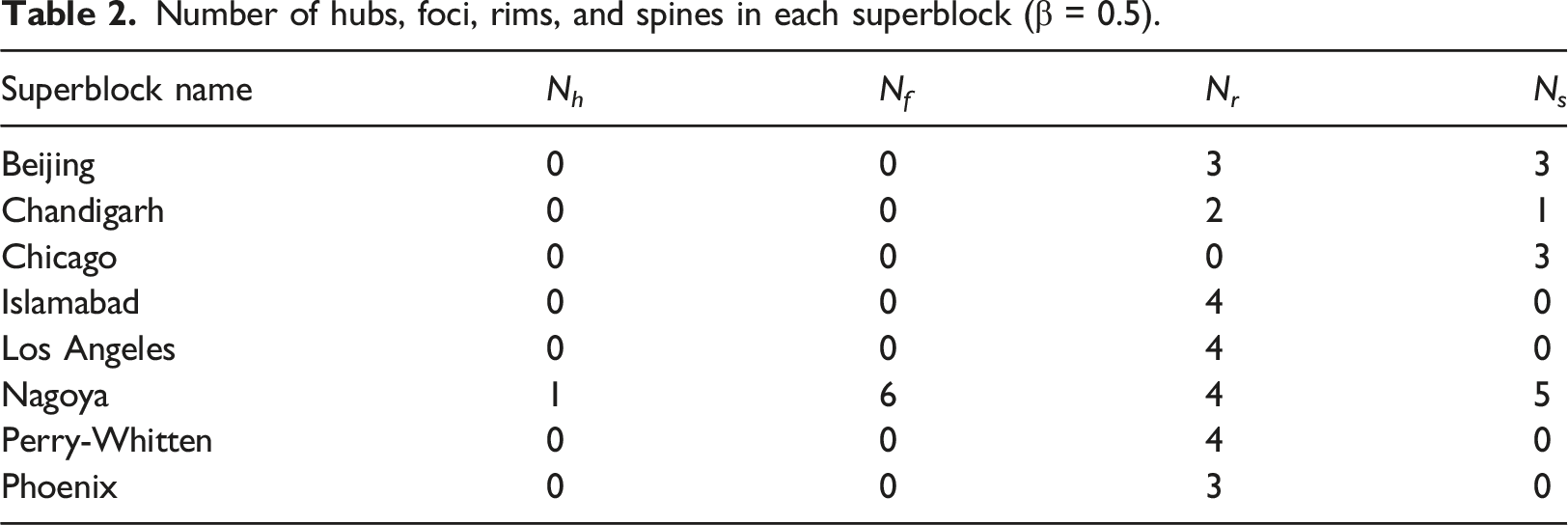
Number of hubs, foci, rims, and spines in each superblock (β = 0.5).
The algorithm-based classification generally speaks to our intuition. For example, the spine-type integration core identified in the superblock from Beijing foregrounds the east-west running traversal streets or alleyways (called hutong in Chinese), reflecting a key organizing principle of the traditional urban fabric. Likewise, it is no surprise to see Perry and Whitten’s design and Doxiadis’s design have rim-type integration cores because they are intended to function as relatively self-contained units which do not encourage through-movement. The rim-type integration core present in the superblock from Los Angeles, on the other hand, reflects a development pattern of cul-de-sacs and disjoint enclaves.
Discussion
A methodological framework to define and explore new types of designs
The concept of type is central to architecture as a profession and as a discipline. As Moneo (1978) pointed out, Architecture “is not only described by types, it is also produced through them” (p. 23). When it comes to urban street networks, we can distinguish types based on the form of the associated integration cores. Accordingly, we offered rigorous, algorithm-based definitions of integration cores and types. These were applied to both experimental designs and empirical examples and allowed the identification of designs with integration cores of specified properties.
The query algorithms can be further refined as needed. For example, among the experimental designs with full-deformed-wheel-type integration cores, we can further distinguish between those whose integration core is small and clearly identifiable and those whose integration core is large and pervasive. We can do so by measuring the clarity of the integration core by the ratio between the theoretical minimum size of a full-deformed-wheel-type integration core for a ½ mile by ½ mile square superblock and the observed size (Figure 8). Designs with full-deformed-wheel-type integration cores (with the integration core defined as the set of continuity lines whose DDL is at least 0.5 standard deviations below the mean DDL of the design). The integration cores of high clarity are shown along the columns on the left; the ones of low clarity are shown along the columns on the right. Different rows of designs are generated by different syntactic operators, in the following order (from top to bottom): contract edge, cross-concatenate vertices, disjoin vertices, shift vertex, split vertex, mixed operation.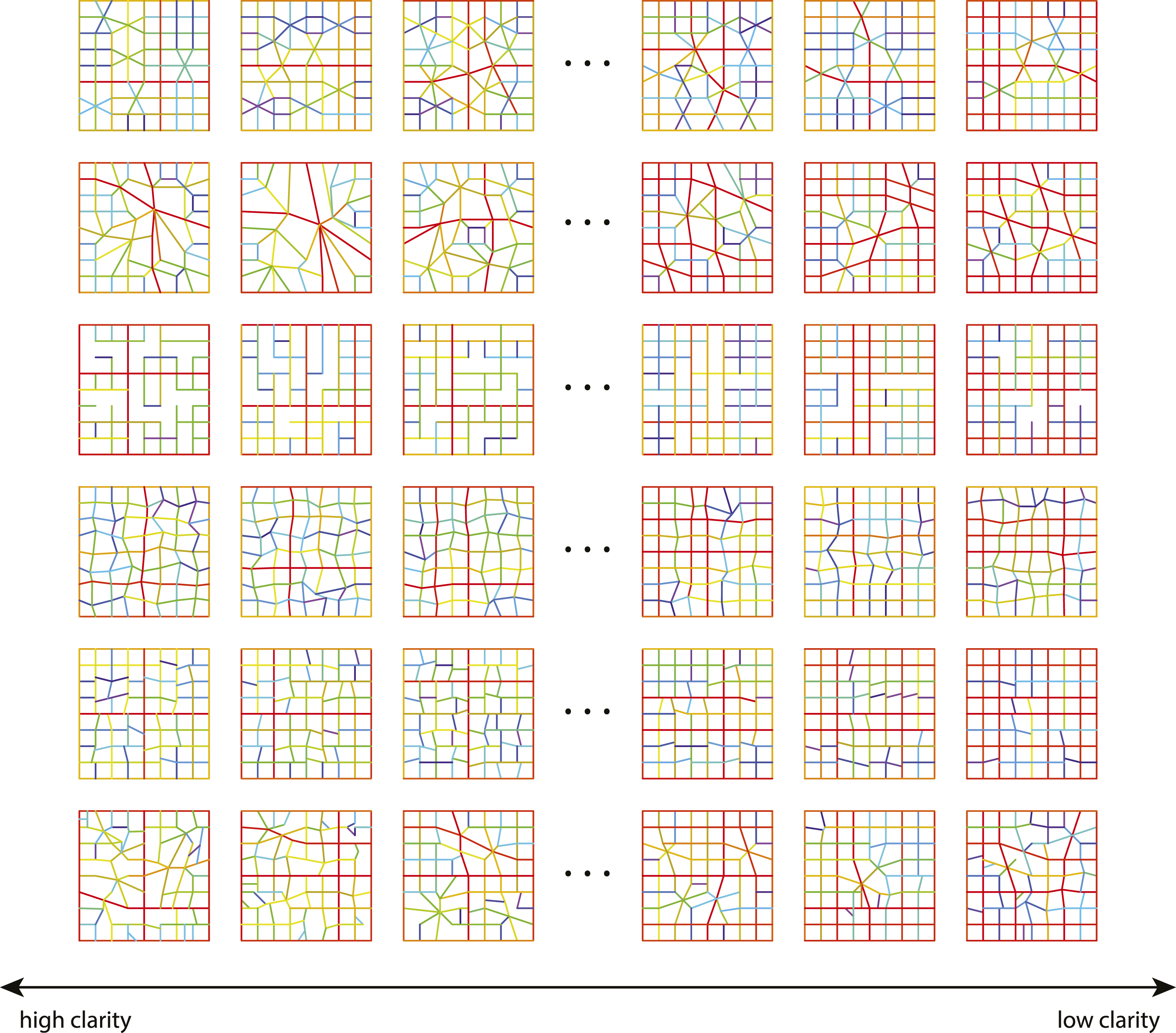
The different ways to achieve the same type of integration cores: Description retrieval
Experimental designs were classified by the type of the syntactic operator used in the generative process, and by the type of the integration core emerging after the query process. Discriminating between the types of designs according to a query process is essentially equivalent to what Hillier and Hanson (1984) called “description retrieval.” As they pointed out, locally ruled processes can give rise to a global order that is knowable and retrievable by reflection, and the description-retrieval mechanism is important for reproducing the same global order without going through the same local processes (Hillier & Hanson, 1984). Our study suggests that there is no guarantee that by adopting a particular production rule we are bound to arrive at a specific global order. Constant reflection on, and evaluation of, the emergent syntactic structure at the global scale is necessary.
Core types and design choices
Rim integration cores do not encourage movement towards the center of the superblock. They imply the relative isolation of the internal street network from the surrounding supergrid. Spine cores imply the presence of at least one local main street that is connected to the global supergrid. Radial cores, and particularly deformed wheel cores, imply a smooth interface between the global supergrid and the local street network, inviting movement and exploration throughout the superblock. Modeling the interrelationship between the local integration cores of the street networks inside superblocks and the global core of areas comprising many superblocks is outside the scope of the paper. It is intuitively obvious, however, that spine and radial local cores will feature as inward extensions of the global core, while rim cores will simply reinforce it. In one case, the interface between local and global cores links the internal street system to the supergrid; in the other case, it separates it.
This is why core typology informs design choices. Our examination of the experiment design universe, however, shows that there is some added complexity regarding the relationship between integration analysis and design evaluation. We end by pointing this out in detail, through simple hypothetical examples.
Just as the repetitive application of the same kind of local design move does not necessarily lead to designs with the same kind of global syntactic structure, designs with the same type of integration cores can be realized in various ways. For example, the schematic superblock designs shown in Figure 9 all have deformed-wheel-type integration cores. Their internal street layouts, however, can lead to different types of urban development and give different experiences. The first design, with cul-de-sacs hanging on the bounding streets, forms an environment of enclaves. The second design substitutes local discontinuous loops for the cul-de-sacs, maintaining the separation of local parts. In the third design, the loops are linked to form a ring street; this leads to the experience of a periodic switch between local streets and main streets as one walks along. In the fourth design, there are burgeoning local street networks inside the original quarters, but these are not directly connected across quarters. The fifth design is dense and highly connected, with the hierarchy of circulation flow moderated by the variable curvature of streets. The sixth design incorporates a variety of streets differing in both length and connectivity and thus tends to create a rich set of spatial conditions which would allow for diverse scales and types of development. It serves as an example of street network that is dense, continuous, and continuously differentiated. Formal definitions of integration cores and their types can serve as a solid basis for such comparisons between different design strategies and different design aims. Schematic superblock designs that can give rise to a full-deformed-wheel-type integration core. The integration cores are drawn with thicker lines.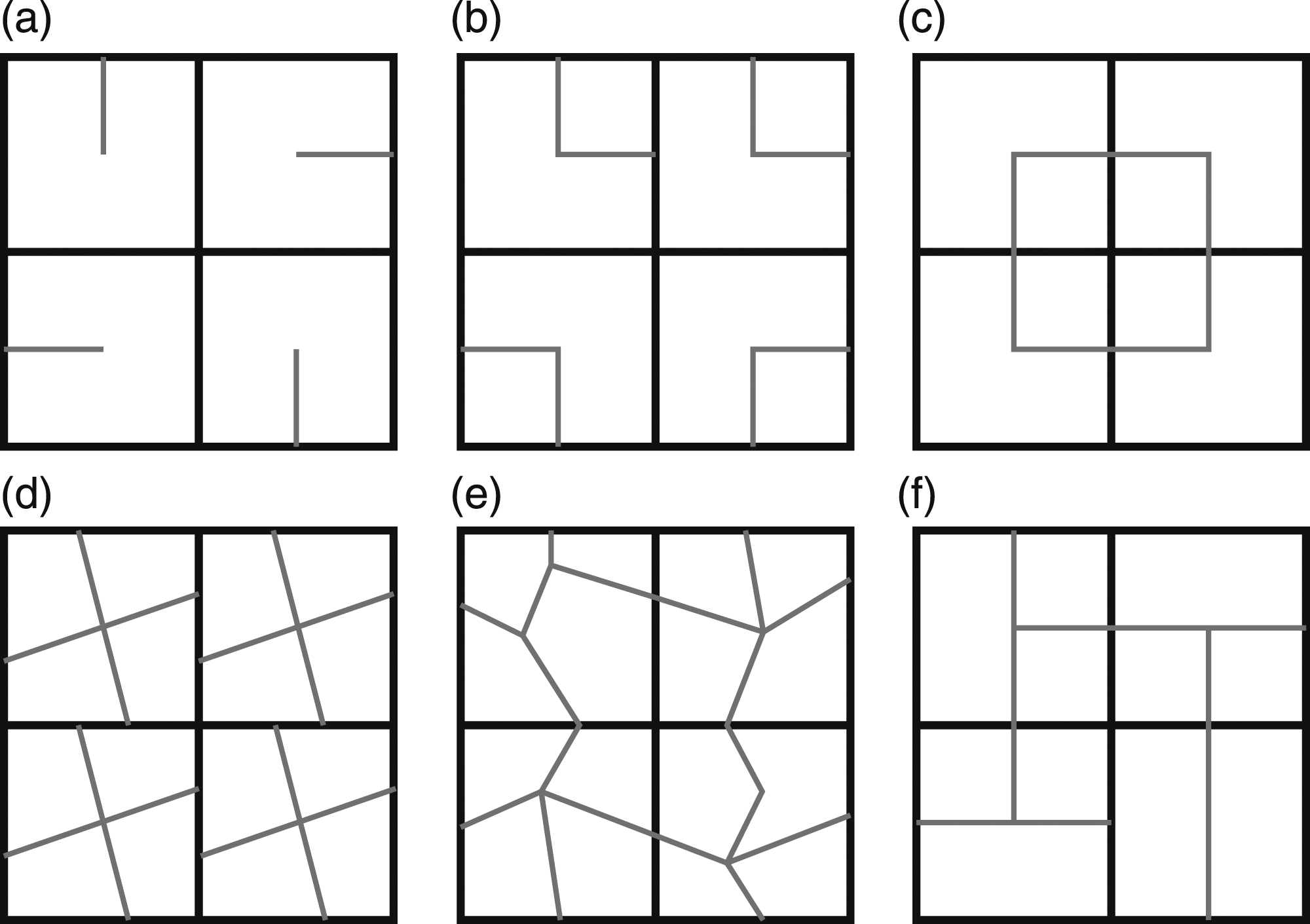
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.