
Abstract
Running is one of the most popular forms of physical activity. To date, no literature explores association between the features of the built environment and running. A limited amount of literature uses walkability as a proxy for runnability, thereby misjudging the differing goals of walking and running: leisure, sport or commute. We create a rough runnability index using an affordance-based framework as a conceptual and methodological attempt to quantify features of the built environment that facilitate or hinder running as a form of leisure or sport activity. Three indices are created in the City of Surrey, British Columbia, Canada using pixelated edges. We find that areas in the downtown core and near high traffic routes show low safety and general runnability, whereas areas near parks and in low traffic, residential areas show higher safety for runners. Representing runnability using pixelated edges allows for sub-block level analysis of runnability as experienced by runners.
Introduction
Various forms of physical activity can address a range of common physiological and psychological problems, such as cardiovascular disorders, metabolic issues, early death and poor mental health, and promote a sense of agency and control over one’s life and body (Brocherie et al., 2015; Macera et al., 2017; Major, 2001; Paffenbarger et al., 1993; Salvo et al., 2018; Short et al., 2014). Therefore, increasing people’s activity levels on a population level has the potential to result in great gains in health and wellbeing. The built environment may be one such intervention as studies on walkability show an association between features of the built environment and higher levels of walking for recreation and transportation (Arvidsson et al., 2012; Cerin et al., 2007; Owen et al., 2007; Saelens and Handy, 2008). However, research on the role of the built environment in facilitating physical activity has focused on pedestrians and cyclists, leaving a gap in the literature on how the built environment can facilitate running, an extremely popular form of activity (Strava, 2019) largely dependent on human-made infrastructure (Bodin and Hartig, 2003; Breuer et al., 2011; Cook et al., 2016; Deelen et al., 2019; Ettema, 2016). This gap has meant that runnability studies have relied on findings and methods from the walkability literature. However, the needs of these two groups – walkers and runners – are different and must accordingly be reflected in the variables used to measure runnability (Ettema, 2016). The Rough Runnability Index (RRI) proposed here demonstrates features of the built environment that provide affordances to runners. These features are different from the ones typically quantified in walkability indices thereby highlighting the different needs and objectives of walkers and runners. This paper outlines the creation of an unweighted runnability index for the purposes of studying features of the built environment specifically using an affordance-based framework.
Background
Runnability
Running is an alternate form of physical activity and one of the most frequently practiced sports (Breuer et al., 2011; Leslie et al., 2004; Strava, 2019). Runnability, much like walkability, can be understood as a quantification of the features of the built environment that facilitate movement of runners. No such definition has been offered before since limited literature exists on the association between the built environment and running (Deelen et al., 2019; Ettema, 2016). For this study, we specifically define runnability using an affordance-based framework that considers micro-scale and macro-scale modifiable features of the built environment that may be perceived by runners to facilitate their run.
To date, literature and urban planning policies focus on features of the built environment that facilitate and hinder walking for transportation and walking (Boarnet et al., 2011; Brownson et al., 2009; Handy et al., 2002). In fact, environments that are suitable for walkers and cyclists may not necessarily be suitable for runners since the ‘speed, intensity, spatial extent, and sensory experiences’ (Ettema, 2016: 1128) are unique to running. The built environment must accordingly be studied for the specific purpose of understanding how it facilitates and hinders running (Table 1).
The list of built environment features included in the three different rough runnability indices.
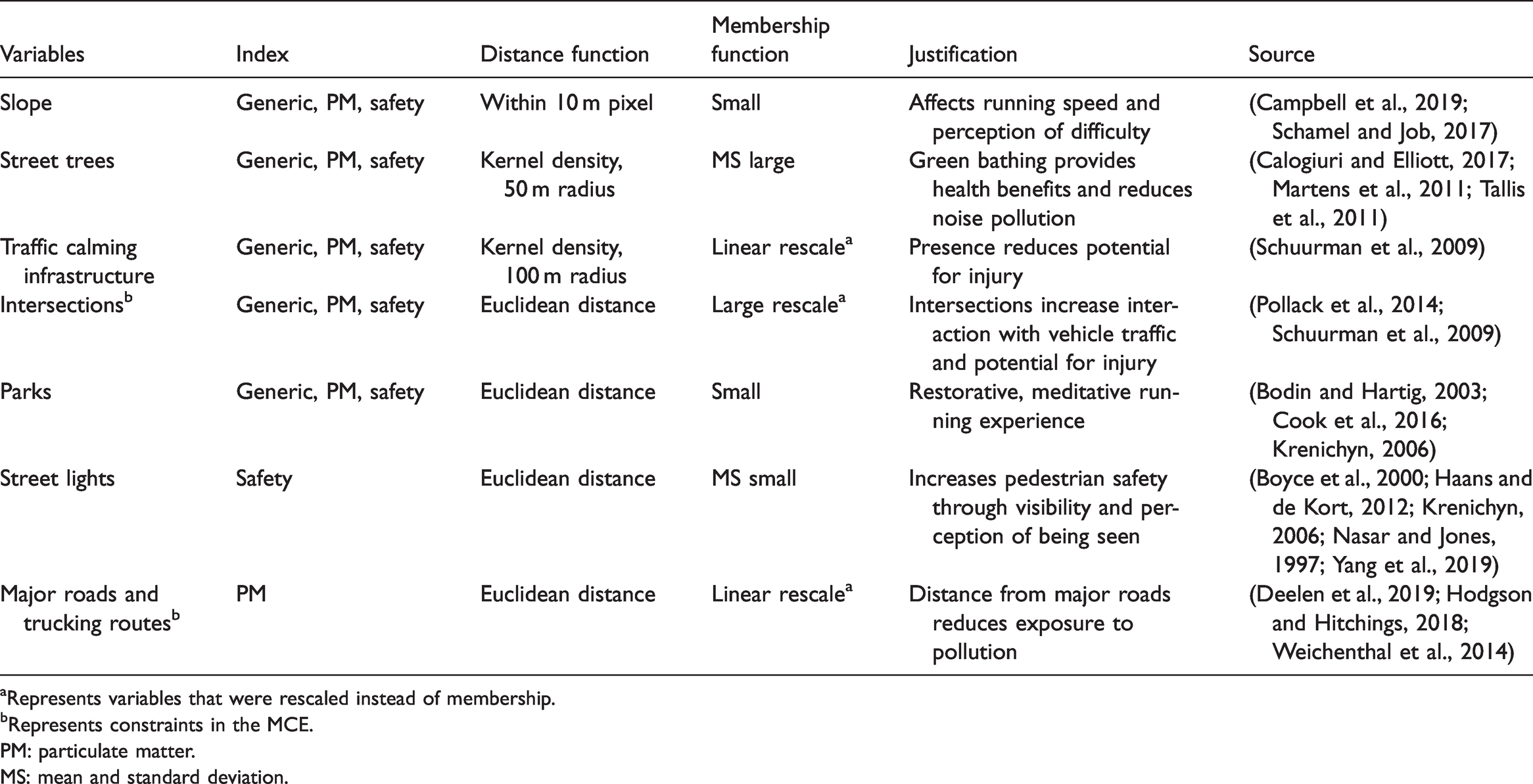
aRepresents variables that were rescaled instead of membership.
bRepresents constraints in the MCE.
PM: particulate matter.MS: mean and standard deviation.
There is an overwhelming consensus that environments away from traffic and deeper along park trails facilitate physical activity (Harte and Eifert, 1995; Martens et al., 2011; Voigt et al., 2014; Yfantidou and Anthopoulos, 2017). This may be because the continuous nature of running on trails, which helps conserve momentum and thus energy, is in contrast to the start-and-stop nature of negotiating busy streets and their intersections, and that pleasant environmental stimuli can mitigate psychological and physiological stress (Harte and Eifert, 1995; Krenichyn, 2006; Nixon, 2012). Moreover, there is an exponential decline in pollutants with increasing distance from the road (Carlisle and Sharp, 2001; Health Effects Institute, 2010). As runners focus on settling into a rhythm, perceptions of heat, humidity, pollen, smoke and fumes vary depending on physiology and previous running experience in other environments (Hodgson and Hitchings, 2018). This is why even though traffic calming infrastructure may increase pollution (Ghafghazi and Hatzopoulou, 2015), it may not be perceived because it increases perception of safety and separation from traffic (Schuurman et al., 2009).
Affordances
James Gibson, an ecological psychologist, coined the term ‘affordance’ to describe a complementary relationship between the animal, that which perceives the environment, and the environment, that which affords abilities to the animal (Gibson, 1979). Gibson meant this concept to describe the relationship between the natural environment and animals, but it can also be extended to the complementary relationship between the built environment and humans. Affordances are as much about the walkability, runnability or accessibility of the built environment as it is about the perception and spatial cognition of the human that encounters it. As Gibson says, ‘It is equally a fact of the environment and a fact of the observer’ (1979: 129).
How, then, can the concept of affordances help us quantify the extent to which the built environment can provide us with the ability to traverse it? To this Gibson would say, ‘An affordance cuts across the dichotomy of subjective-objective and help us to understand its inadequacies’ (1979: 129). We could interpret that to be a form of determinants, much like the early researchers of the relationship between the built environment and physical activity did; note the consistent usage of the term ‘determinants’ to describe the quantification of the built environment features that afford physical activity (Bauman et al., 2002; Pikora et al., 2003).
Pixelated edges
Indeed, GIScientists have applied the concept of affordances to research in wayfinding (Raubal, 2001), agent-based modelling (Turner and Penn, 2002) and even archaeological modelling (Gillings, 2012). However, this concept has not yet been applied to research on the relationship between built environment and physical activity. This paper argues that an affordance-based measure of the built environment would more appropriately account for the subjectivity that instructs the relationship between the social and the ecological. We use pixelated edges to represent the subjective and varied experience along sections of a single street segment within our model. The pixelated edge can be understood to be both the conceptual and visual representation of an affordance-based measure of the built environment.
To date, no literature has explored the visual representation of affordances, renouncing it as a theoretical concept that allows us to explain spatial cognition, and instead turning to questionnaires and surveys to qualitatively examine perception of space. Lars Marcus (2018) expanded on Gibson’s research, specifically exploring the importance of geometric representations to visualize and spatially evaluate affordances. Marcus argues that memory cannot be separated from perception since previous snippets of the perceived environment colour the current perception of the environment as humans move through a continuous space (2018: 7). Although this space has a non-changing environment, it is observed through the changing location of the observer, or runner in this case.
While both Gibson and Marcus move on to explore affordances as a continuous concept, the geometric representation Marcus proposes is axial lines which represent the longest line of sight from a point of observation (Turner and Penn, 2002; Turner et al., 2005). However, what Turner and Penn go on to find in their study is interesting as well: that the agent moves given the possibility of movement and they record this in a pixelated image of movement points (Turner and Penn, 2002: 480–481). This paper explores this geometric representation through the concept of a pixelated edge: a set of movement surfaces that are rasterized in order to show the individual movement points of observation and decision making when moving through space. This network of pixels is a network, not in a strictly topological sense, but in the sense of where humans find the possibility to move through a set of connected pixels. Pixelated edges move away from the aggregation of features that lead to misrepresentation of smaller areas within bigger areas.
Methods
The City of Surrey is a suburb of the City of Vancouver and resides within the Metro Vancouver region. On the south side of the Fraser River and adjacent to the US–Canada border, it is the second largest city in British Columbia by population and, due to its status as the fastest growing city in the province, the city is preparing to become the most populated in the region. A semi-urban area, Surrey is a mix of high-density urban living, suburban detached homes and rural agricultural land (Figure 1). We studied Surrey’s built environment since it best captures the range of features available in urban, suburban and semi-suburban areas that could best represent runnability in different contexts.
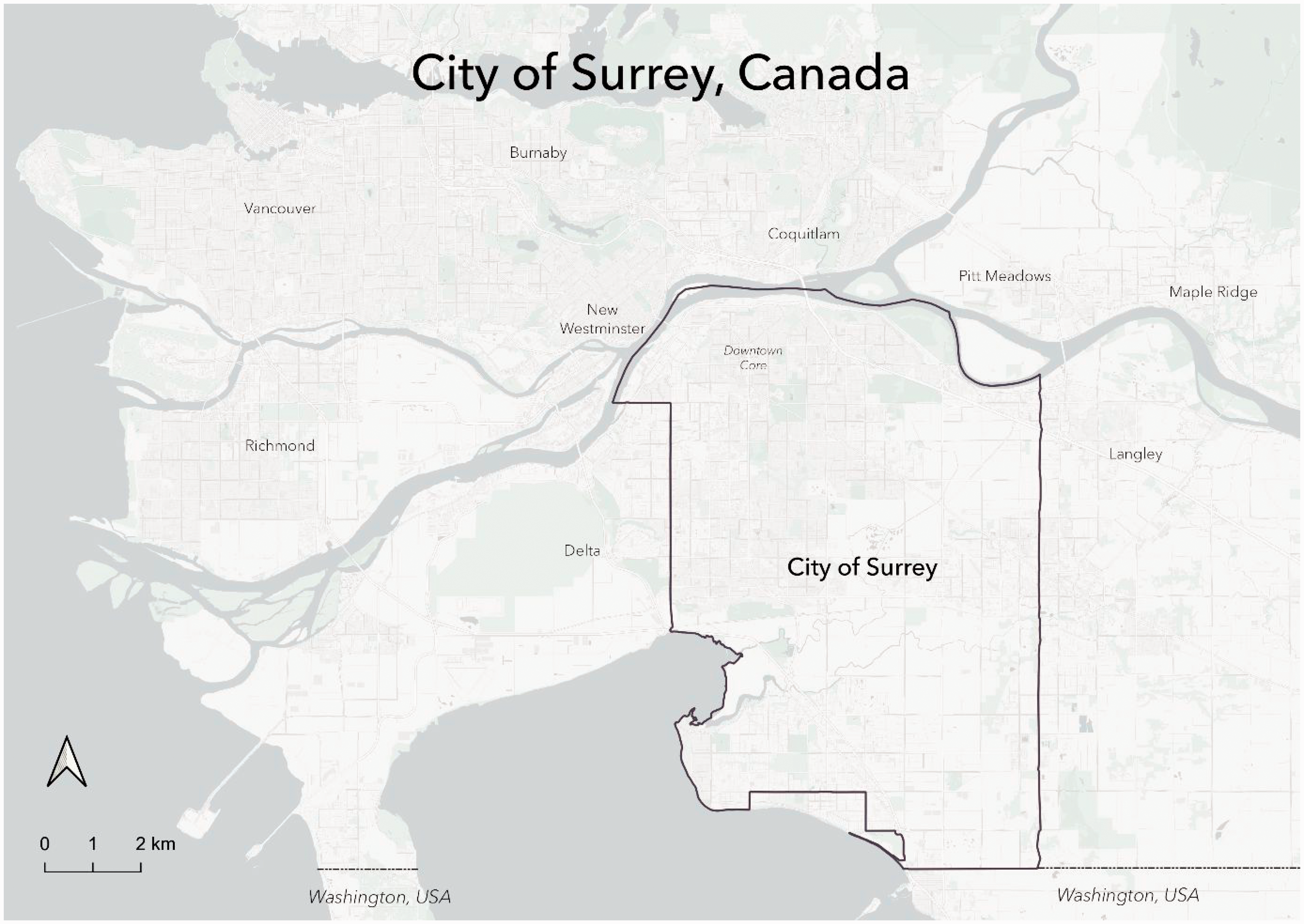
A suburb in the Metro Vancouver area, the City of Surrey is one of the fastest growing cities in Canada.
Variable selection and preparation
As we do not currently have a rich runnability literature that one may find for walkability indices, we relied on literature from a variety of disciplines that addresses elements of the built environment that could be found to influence runnability. We also included elements of walkability indices that may influence runnability. The built environment features selected for this analysis included sidewalk intersections, street trees, slope, traffic calming infrastructure, parks, street lights and major roads and trucking routes (Table 1). All data were collected from the City of Surrey Open Data Catalogue (Surrey, 2014). All analysis was conducted using ArcMap 10.7 and ArcGIS Pro 2.6.
Sidewalks were used as the network best representative of where runners would run as research has shown that the street network may not be representative of where people can walk (Ellis et al., 2016). This may be the same case as running since sidewalks reduce the chances of interaction with vehicular traffic by design. The sidewalk network acquired from the Surrey Open Data Catalogue was cleaned, joined to the trail network and rasterized to 10 m2 pixels. All other data were then clipped to this base dataset to create the visual and computational pixelated edge.
The traffic calming dataset represents speed humps, speed tables, raised intersections, raised crosswalks and traffic circles as point features. The density of these points within each 100 m2 was calculated using Kernel Density Estimation (KDE), which also allowed for the rasterization of the dataset (details can be found in the Supplementary Material). The resulting KDE dataset was then clipped to the sidewalk network for a more realistic calculation of the extent to which traffic calming affects runners along the sidewalk network. The same method of density estimation and rasterization was used for a tree dataset that represented all trees planted and maintained by the City of Surrey on public property. However, the KDE was calculated using a search radius of 50 m2 since the presence of trees on streets in general and the high level of detail in the dataset allowed for a more precise density estimation of the effects of tree bathing on runners in the sidewalk network.
Proximity to parks and street lights along the sidewalk network was calculated using the Euclidean Distance tool which, although it was calculated in Euclidean terms, was clipped to the sidewalk network again for a more realistic estimation of the proximity for a runner along a street network. Sidewalk intersections included intersections between street sidewalks and trails that are widely used by runners. Both sidewalk and trail datasets were merged first, and then intersections were calculated and rasterized using the Euclidean Distance tool that represented proximity to intersections along the sidewalk network.
Slope was calculated using a LIDAR dataset from the City of Surrey’s Open Data Catalogue (Surrey, 2014) and then joined with the sidewalk network. The slope dataset was further cleaned so that slope values from 0 to 50 along the sidewalk network were included in the analysis. Major roads and trucking routes were two separate datasets used to represent distance from pollution. The distance from both was calculated using Euclidean Distance and then extracted using 300-meter buffers (Table 1).
Creation of the RRI
The proximity to intersections, parks, street lights and major roads and trucking routes was calculated using the Euclidean Distance tool since rasters do not maintain network topology. Euclidean Distance from major roads and trucking routes were used as a proxy of particulate matter. Once all the variables were cleaned and prepared, they were standardized using the Fuzzy Membership function or the Rescale by Function tool. The different functions that are used for each variable are listed in Table 1 and were used based on the suitable values of each variable to be included in the final index. The membership functions provide high membership to those with either large or small values (e.g. slope, parks) or based on the mean and standard deviation of the distribution (e.g. street trees, street lights). The rescaling function is used to rescale suitability values at various numeric scales to comparable values from 0 to 1.
We used a Multi-Criteria Evaluation (MCE) model to overlay the variables into a single index. MCE models allow the criteria to be weighted and/or ordered for future adjustments to the index (Greene et al., 2011). Traditional MCE models require raster data which were helpful since we rasterized all our data into pixelated edges. The MCE models for the runnability index would include variables that are considered factors that contribute to high runnability index scores, and constraints that contribute to low runnability index scores. Proximity to trees, traffic calming infrastructure, parks and street lights are factors, while proximity to intersections, major roads and trucking routes are constraints. Lower slope values are also considered a factor in the index (details can be found in the Supplementary Material).
Finally, three indices were created: a generic index considering standard features of the built environment, a safety index that also includes density of street lights and a pollution (particulate matter or PM) index that considers proximity to major roads and trucking routes in the MCE calculations (Table 1). The MCE for each index was left unweighted since we did not have data on runner preferences. This was done with the purpose to solely explore how features of the built environment can be quantified and measured so that future data on runners can be utilized to validate and adapt this index to their study area contexts.
Results
The generic runnability index (Figure 2) shows higher values deeper into the centre of parks (e.g. Green Timbers Park) or urban forests (i.e. South Surrey Urban Forest) or in highly gridded sidewalk networks (i.e. Surrey–Langley border). On the other hand, lower values are more consistent with longer blocks, such as some blocks in the Downtown Core and along Fraser Highway. The Industrial Area, having a lower density of traffic calming, street trees and parks, shows lower runnability values overall. Since the variables that compose the generic runnability index are not weighted, each variable has an equal chance of affecting the final runnability score. This is most apparent in the generic index scores for the South Surrey Urban Forest which shows medium runnability values along a highly dense network of trails that has several trees and at a distance from street intersections but may not be near traffic calming infrastructure.
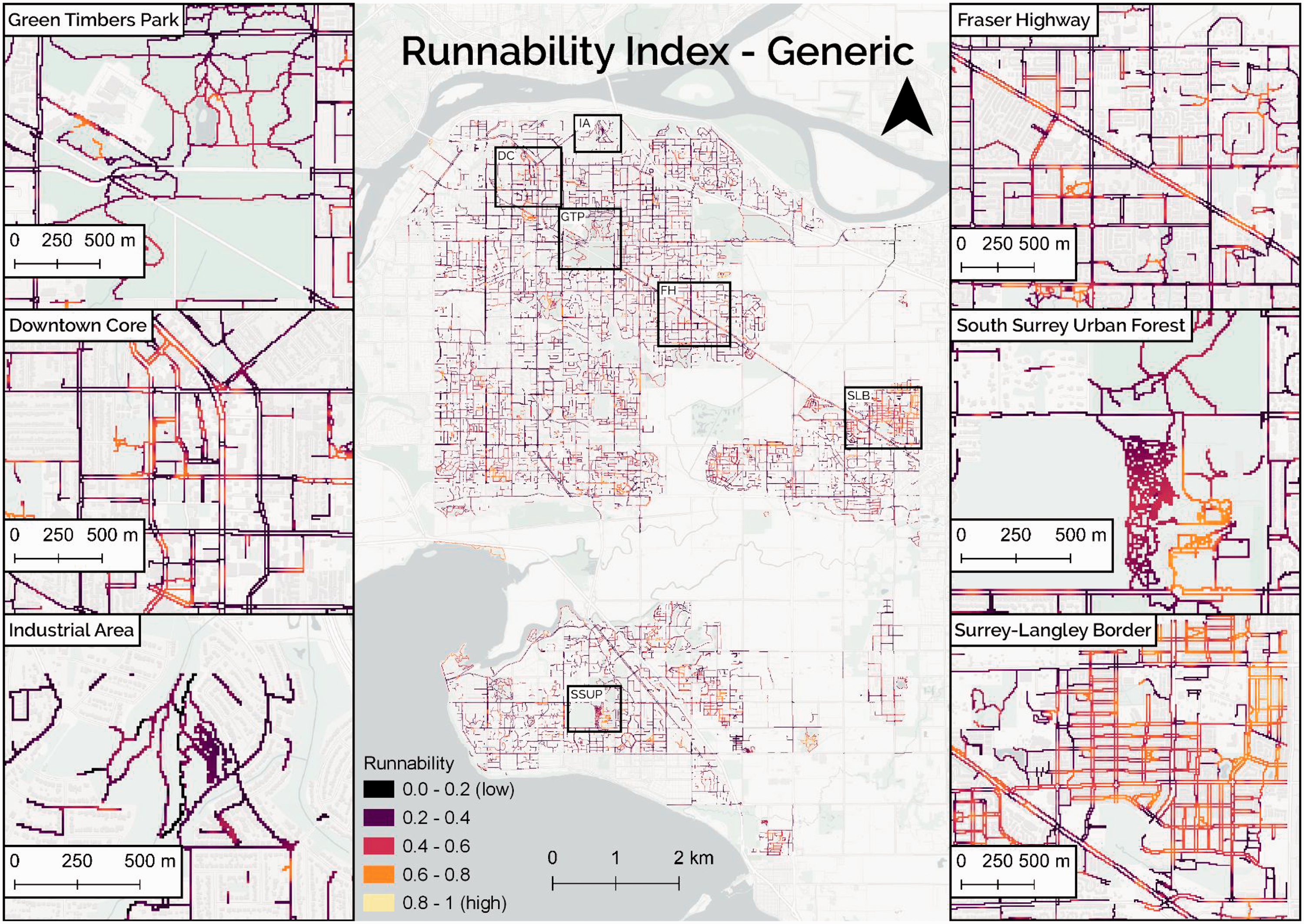
The generic runnability index is a composite measure of slope, density of street trees and traffic calming infrastructure, and distance from intersections and parks. The inset maps show the variation in runnability in urban and suburban areas where the insets are referred to in the main map by their initials (e.g. Green Timbers Park as GTP).
The PM runnability index (Figure 3) again shows higher values deeper into parks and urban forests where runners are farther away from potential sources of traffic pollution. This is also apparent in the highly gridded residential area at the Surrey–Langley border. However, the Downtown Core and areas around Fraser Highway have lower values because they have or are considered major roads, respectively. The Industrial Area does not show lower scores of runnability as expected, instead representing medium-high scores of runnability.
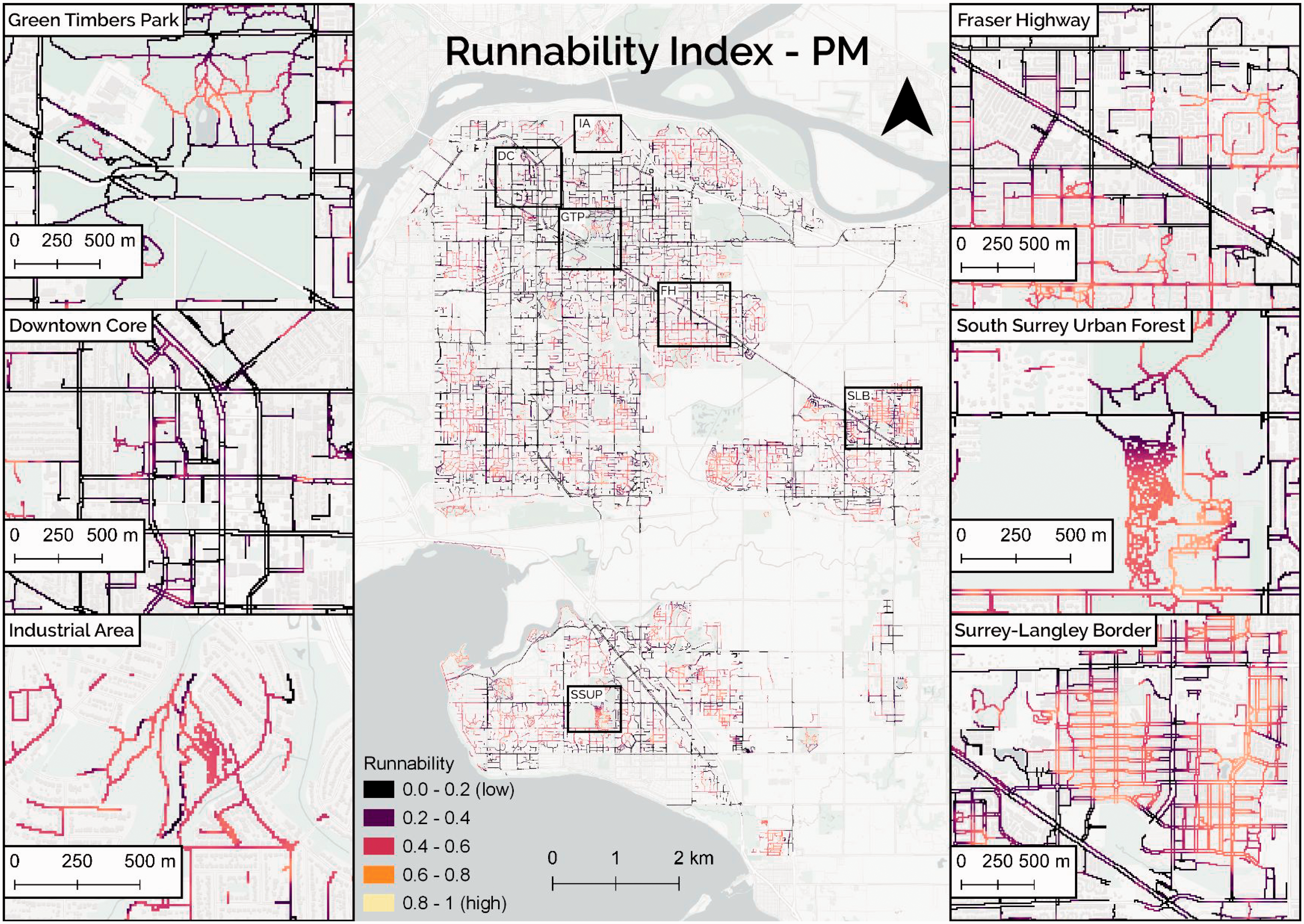
The pollution (PM) runnability index is a composite measure of slope, density of street trees and traffic calming infrastructure, and distance from intersections, parks and major roads and trucking routes. This index builds on the generic index by including the distance from major roads and trucking routes as a proxy for distance from potential sources of pollution that runners may perceive as a deterrent to running.
The safety runnability index (Figure 4) shows almost an inverse of runnability scores compared to the PM runnability index (Figure 3) for some areas. For example, Green Timbers Park, the Downtown Core, the Industrial Area and the South Surrey Urban Forest all show inverse scores of runnability compared to their scores in the PM runnability index. This is likely because the safety index accounts for the presence of street lights rather than proximity to major roads and trucking routes. In this sense, parks, urban forests and industrial areas would have a lower density of lighting compared to major streets, such as those in the residential area of the Surrey-Langley border, Fraser Highway and the Downtown Core.
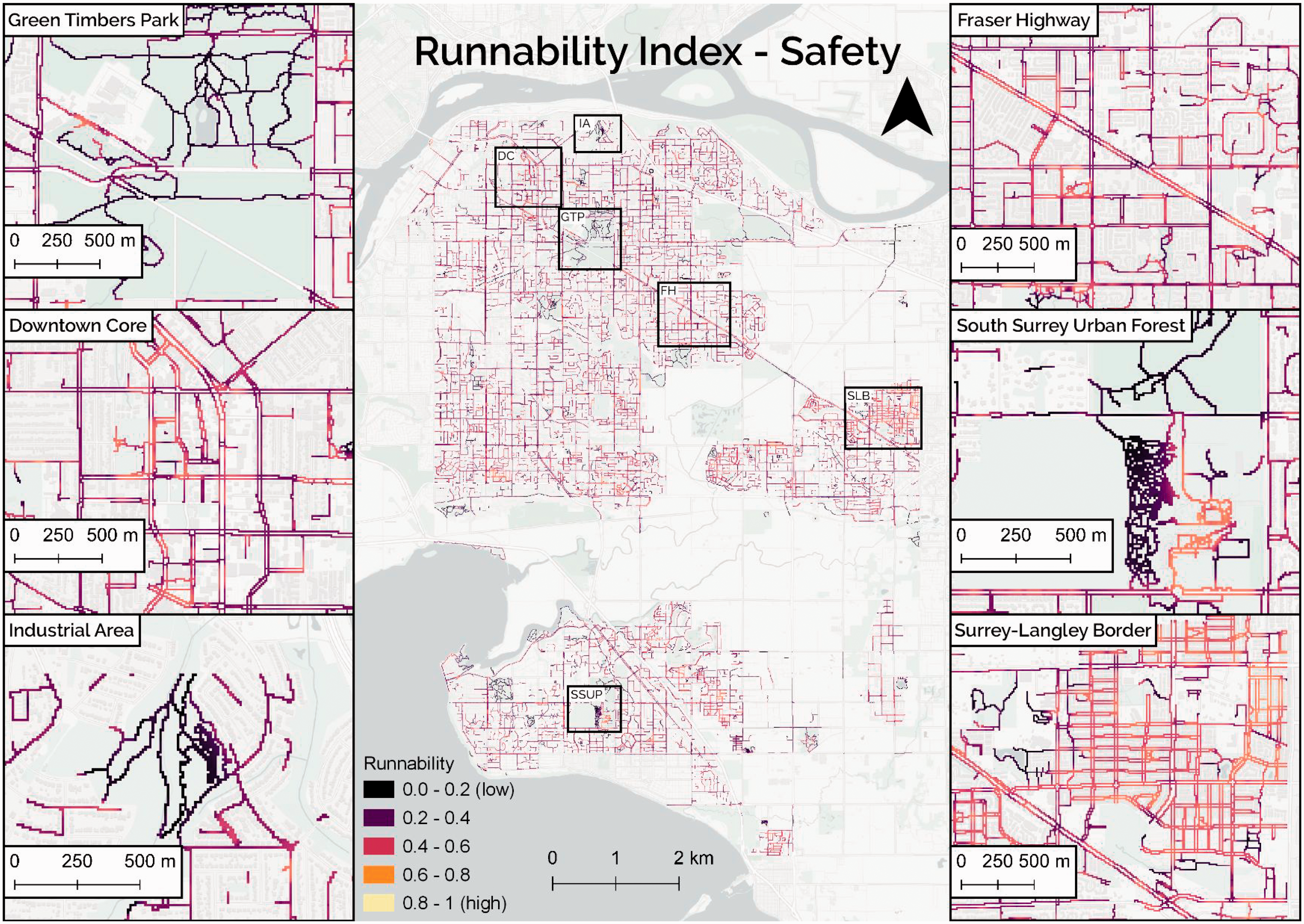
The safety runnability index is a composite measure of slope, density of street trees and traffic calming infrastructure, and distance from intersections, parks, and street lights. This index builds on the generic index by including the presence of street lights that may create a perception of safety for demographically vulnerable runners after dusk.
The three indices were converted into vector points and averaged to show how these pixelated values would aggregate to 1 km2 hexagons. These were then standardized by the length of the sidewalk within each hexagon. Figure 5 compares the standardized average runnability scores between the three indices. The Surrey–Langley border area and the South Surrey Urban Forest consistently shows high runnability scores across all three indices. There are some areas that show continuity in runnability scores between the generic index and the safety index and other areas that show continuity in runnability scores between the generic index and the PM index. An interactive map of all three indices represented as pixelated edges can be found on ArcGIS Online.
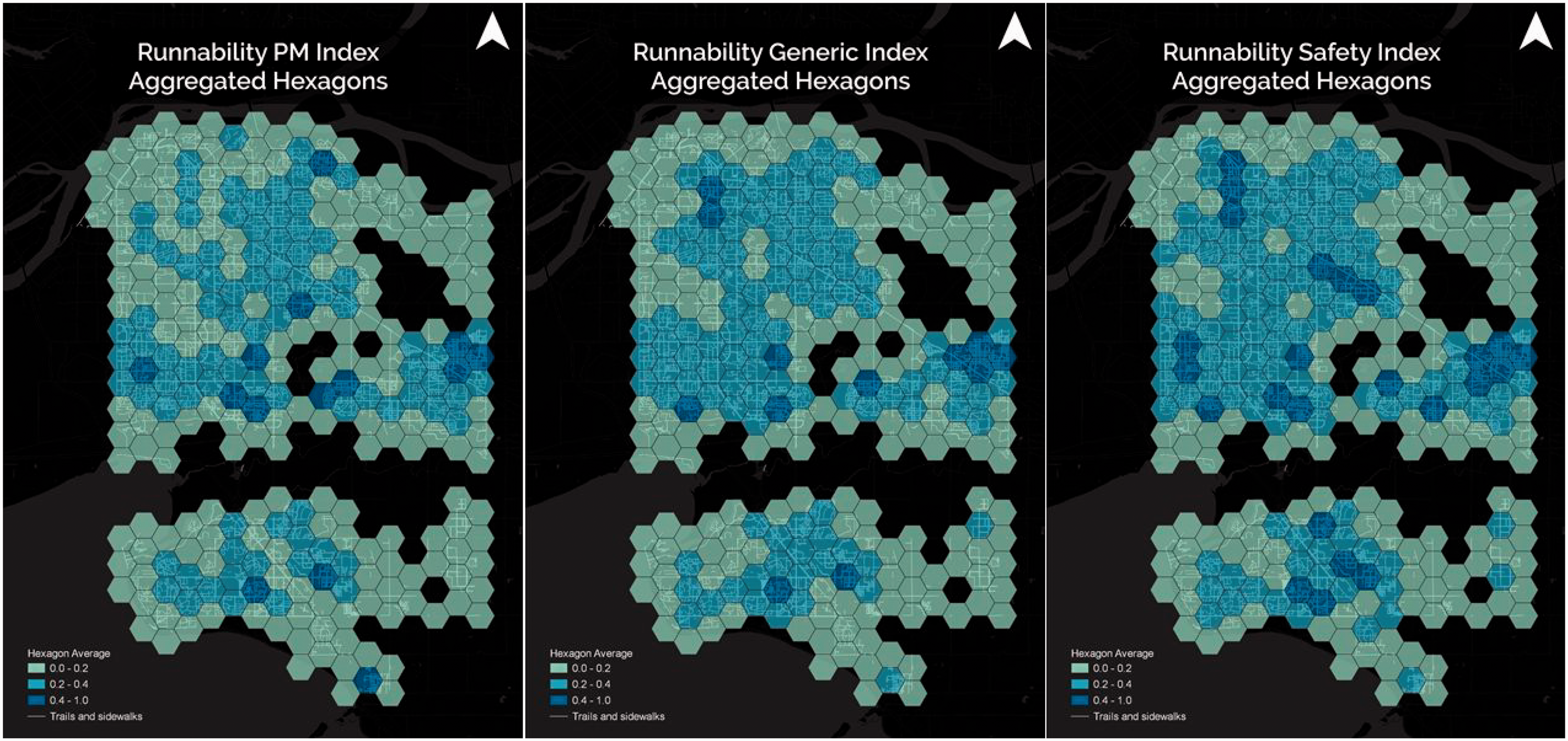
The three pixelated indices were converted into vector points representing 10 m2 pixels each. They were then averaged for each hexagon and standardized by the total sidewalk length within each hexagon. Each hexagon represents 1 km2. An average of 0 indicates low average runnability while 1 indicates high average runnability.
Discussion
This study provides the first runnability index to explore the affordances of the built environment for runners. One could make the argument that walkability indices for recreational walking are a sufficient proxy for runnability since both activities demand similar aesthetics and interactions from the built environment (Ettema, 2016). However, this research and the few supporting papers in the literature suggest that runnability and walkability are simply not congruent (Breuer et al., 2011; Bodin and Hartig, 2003; Ettema, 2016). Walkability tends to measure the ability to move on foot in the urban environment for the purposes of commuting, errand-running and moderate physical activity. However, runnability measures the affordance of the environment to support more sustained and vigorous physical activity of the sort recommended for health outcomes (Lee et al., 2014; Leslie et al., 2004). Runnability does not link points of interest in the urban environment, but rather seeks to find routes that minimize interaction with traffic and maximize healing experiences with nature.
To this extent, vector representations of the street network are only able to consider features at the block scale. By rasterizing the built environment, this study measures the effect of micro-scale built environment features at the sub-block scale. This is especially useful in suburban areas with high block length variation, such as Surrey, where we can avoid aggregating features to the block scale which reduces the resolution and accuracy of representing built environment affordances as experienced by runners. Rasterization also allows flexibility in highlighting specific features relevant to runners such as presence of street lights at night to increase perception of safety. By measuring distance on a continuous scale (i.e. increasing distance from a street light) rather than an absolute scale (i.e. buffer of 500 metres), raster analysis allows to show variation in minor variation in areas between street lights where the light may not reach.
Indeed, there has been little opportunity for affordance-based analysis in vector-based network analysis. Affordance is the perceived quality of an object or surfaces (Gibson, 1979). To this extent, Couclelis argues that vector representations have no room for the dynamism and flexibility required and created by spatial cognition: ‘it does not abide by the Boolean either-or’s of theory, methodology, or technique’ (sic) (1992: 71). While some may argue that only vectors truly maintain the topological relationship in networks, rasters, as Couclelis (1992) asserts, are simply the topological corollary of vectors and that it is elementary to compare the contribution of each to representing the world as it would be perceived. Instead, just as Gibson organizes the world of affordances, we represent a perceived surface or field that consists of detached objects that humans relate to (Gibson, 1979; Smith and Mark, 2003).
The hexagon aggregations of runnability provide a novel way of representing the larger scale cumulative rather than census tracts, neighbourhoods or postal codes typically used in health research. Although hexagons are a homogenization that may not hold true for the entire area, we are able to reduce any misrepresentation by standardizing cumulative runnability scores by total sidewalk length within each hexagon. Hexagons are also able to reduce edge effects that plague network and non-network based analyses of built environments in health research (Gil, 2017).
Walkability indices used as proxies for runnability might offer insight into the affordances of the built environment for those who run to commute because of their focus on street connectivity. However, not all runners run to commute; in fact, most runners do not (Strava, 2019). The RRI addresses the affordances of the built environment for those running leisurely or for sport and provides limited insight into affordances for run commuters. The index is also rough since it is not weighted and remains a conceptual and methodological attempt to quantify the built environment for runnability. Future runnability indices should select and weight variables after input from professional runners and academics. The indices would also benefit from sensitivity analysis and validation using mobility data.
Conclusion
Runnability is an important metric that can visualize the relationship between the built environment and physical activity. An affordance-based framework sheds light on the mutual relationship of features that are built for certain activities, how they are perceived and ultimately used by runners for their purposes. This index provides insight into areas that are runnable in a semi-suburban landscape that can be further weighted to highlight the importance of certain features against others; future research will build on this ability of the MCE model to weight and/or order criteria. This is a conceptual and methodological foray to better understand a different and previously under-studied form of everyday fitness. Runnability, as presented here, is the basis for future, more detailed and possibly more computationally complex measures of the affordances of the built environment for running.
Supplemental Material
sj-pdf-1-epb-10.1177_23998083211003886 - Supplemental material for Creation of a rough runnability index using an affordance-based framework
Supplemental material, sj-pdf-1-epb-10.1177_23998083211003886 for Creation of a rough runnability index using an affordance-based framework by Aateka Shashank, Nadine Schuurman, Russell Copley and Scott Lear in Environment and Planning B: Urban Analytics and City Science
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material is available online for this article.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.