
Abstract
Introduction
Actimetry is increasingly used to measure physical activity (PA) for manual wheelchair (MWC) users. However, conversion of raw data into interpretable PA outcomes remains imprecise, and the differentiation between propulsion and non-propulsion is challenging. Using a previously developed algorithm, the objectives of this study were to: (1) measure the accuracy of total distance collected, and (2) validate the algorithm’s accuracy in differentiating between self-propulsion and non-propulsion.
Methods
Experimental study consisting of two data collection sessions. Actimetry data (Actigraph GT3X+) were collected indoors (controlled conditions) during 100 repetitions (n = 40 MWC propulsion, n = 60 pushing the MWC) over three distances (10, 50 and 100 m). Actimetry data were also collected outdoors (uncontrolled condition) during self-propulsion over 1000 m (10 repetitions). Descriptive statistics (mean and standard deviation) with confidence intervals and accuracy measures (percentage of true value) were conducted for each trial.
Results
The algorithm measured total distance covered indoors with an excellent accuracy (98.9% to 99.8%). It differentiated between self-propulsion and non-propulsion with an accuracy between 96.2% and 99.2% under controlled condition, and between 91.3% and 100.0% under uncontrolled condition.
Conclusions
The algorithm tested allowed precise measurement of total distance covered, as well as an excellent discrimination between self-propulsion and non-propulsion.
Preprint
Gagnon R, Best KL and Routhier F. Validation of an innovative two-part algorithm for detecting self-propulsion in manual wheelchair users. medRxiv 2024: 2024.2011.2014.24313548. DOI: 10.1101/2024.11.14.24313548.
Introduction
Physical activity (PA) guidelines recommend at least 150 min of moderate to vigorous PA per week to maintain good health. 1 Although this recommendation applies to people who use manual wheelchairs (MWC), barriers such as time and energy, physical health, accessibility of sports facilities, and transportation restrict attainment of this goal2,3; currently, more than 70% of MWC users do not meet PA guidelines. 4 Furthermore, the variability of health conditions and disabilities among people who use MWC makes the development of a single PA measure very complex. 5 While more and more technologies are being developed to measure PA levels in ambulatory populations (e.g., cellphone applications, smartwatches), their adaptation to the reality of MWC use is still in its early stages. 6 However, recent studies report that the use of accelerometers could be a promising avenue for measuring PA, including energy expenditure, 7 in MWC users. 8
Accelerometers are discrete devices that accurately characterize movement,9,10 making them a method of choice for objectively and validly measuring PA levels and intensity. Given they are small and lightweight, wearing them does not impede body movements. 11 Accelerometers offer many benefits in ambulatory populations, including monitoring of PA and related goals, increased motivation to perform PA, and built-in feedback.12–14 They also enable PA to be measured more easily and effectively in uncontrolled environments. 15 For all these reasons, recent years have seen the development and adaptation of several types of accelerometers for measuring PA in MWC users, such as SenseWear, 16 ReSense, 17 Apple Watch, 18 activPAL, 19 PAMS20,21 or Actiwatch. 22
The most widely used accelerometer remains the actigraph, such as the Actigraph GT3X+, given its validity, reliability, comfort and ability to measure energy expenditure and different types of PA.7,11,23–25 Actigraphs can be attached to the wheel or worn on the arm to collect tri-axial data during the wheel revolutions, 26 absolute angle and duration of movement, which can be transformed into objective measures of mobility (i.e., total distance travelled, number of bouts, speed and duration of movement).5,7,9 Actigraphs can also provide estimates of PA frequency, intensity and duration of an activity. 6 However, the ability to distinguish between MWC propulsion and non-propulsion (i.e., being pushed by someone else), and deciphering erroneous movements with actigraphs remains challenging.8,27 A recent study by Bourassa et al., quantified intensity of various controlled activities using activity counts per second obtained from an actigraph worn on the arm, suggesting cut-points for low and moderate activities. 7 The authors suggested the need for further precision of actigraphy-predicted PA intensity, and noted the activity counts generated during writing and reading activities. Furthermore, actigraph validation to date has oftentimes been conducted in relatively controlled environments that are not representative of everyday life (e.g., laboratory setting, hard wooden surface such as a gymnasium).7,10,28,29 Moreover, the algorithms used to convert raw actimetry data into PA measurements are: (1) often unable to derive a distance traveled or a speed, 11 (2) have poor validity for measuring erroneous gestures, small-amplitude movements or speeds, 28 (3) are not very or not at all transparent,11,28–31 or (4) are unable to differentiate between self-propulsion and passive pushing of the MWC.9,11,19,22,28
In an attempt to address these challenges, our team has developed a custom algorithm using two actigraphs (i.e., worn on the MWC rear wheel and upper arm) for calculating total distance travelled in a MWC, as well as discriminating between propulsion and non-propulsion. Using this algorithm, the objectives of this study were to: (1) measure the accuracy of total distance collected in a controlled setting (indoors), and (2) validate the algorithm’s accuracy in differentiating between self-propulsion and non-propulsion in controlled (indoors) and uncontrolled settings (outdoors).
Methods
Study design
This study aimed at validating an algorithm for quantifying MWC use activity levels and overall mobility. 32 Data collection was completed during two, 1.5 h sessions at a university campus and affiliated research centre. The Centre Intégré Universitaire de Santé et de Services Sociaux de la Capitale-Nationale Research Ethics Board in rehabilitation and social integration waived the ethical approval requirement for this study given its focus on algorithms and not on human participants (#2025-32390).
Data collection
Actigraph GT3X-BT characteristics. 33

The Actigraph was worn on the upper arm (and not on the wrist as normally used for walkers) to prevent interference with the natural movement of MWC propulsion and since the measurement accuracy is almost identical between the two locations. 34 Data was transferred onto a computer using the Actilife software (ActiGraph, 2023) 35 and was processed using the algorithm. The MWC used during the two data collections was a Quickie GPV. 36
Indoor controlled setting
The first data collection took place in an underground tunnel at a university campus by an undergrad student. Actigraph data was collected over short (10 m) and medium (50 and 100 m) distances in two phases (self-propulsion and pushing the MWC). First, while sitting in the MWC, the undergrad student propelled the MWC over each distance (i.e., 10, 50 and 100 m) using two arms (n = 40 repetitions). Actigraphs were worn on the upper arm and on one rear wheel of the MWC. Second, the student pushed the MWC over the same distances (n = 60 repetitions per distance), and an actigraph was placed only on the rear wheel of the MWC. This second step was designed to calibrate the portion of the algorithm processing the movement of the MWC’s rear wheel.
DBV50 Core measuring wheel encoder characteristics. 38
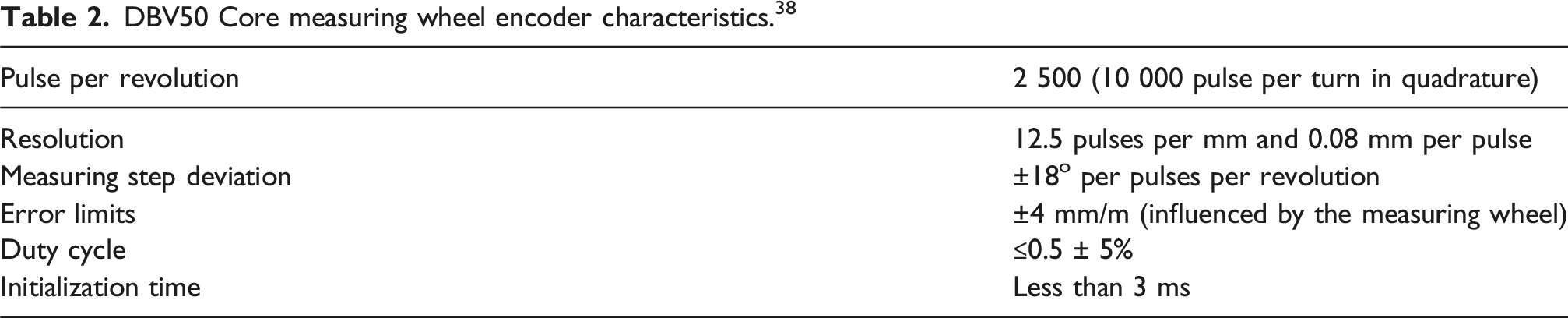
The wheel encoder was used as a standard measurement over all distances to calibrate the algorithm. The USB interface used was a PhidgetEncoder HighSpeed. 39 This interface was used to keep track of MWC movement.
Outdoor uncontrolled setting
Ten members of the research team participated in the second data collection (one 1000-m data collection per team member). To be part of the validation process, team members had to have had some experience in the use of a MWC before and to be able to propel themselves over 1000 m. Data collection took place on a winding bicycle path with a few slopes and varying terrain (e.g., grass, pavement). To measure arm and MWC movement in a real-life context with the actigraphs, team members self-propelled a MWC at a self-selected pace over 1000 m. Two actigraphs were worn, one on the upper arm and one on the rear wheel of the MWC. The high-resolution wheel encoder could not be used as a standard measurement for the second data collection due to the irregular and rough surface of the path (i.e., the vibration created by the surface caused the measured distance to vary too much). Therefore, a trundle wheel similar to the Lufkin 12” Professional Metric Measuring Wheel 40 was used. This measurement tool was chosen because of its low measurement error, 41 and its widespread use in clinical practice and in the actimetry literature.
Data processing
Raw data were processed using a custom algorithm (MATLAB 2019b, MathWorks)
42
with two distinct portions: (1) analyze the distance traveled by the rear wheel of the MWC (wheelchair activity algorithm) and (2) differentiate between self-propulsion in the MWC and the MWC being pushed (autonomous propulsion detection algorithm) (Figure 1). Detail of the algorithm for calculating the distance traveled by the MWC and the presence of propulsion.
The two portions of the algorithm required the following information to analyze data correctly: (1) the wheelchair wheel diameter, (2) the sampling frequency, and (3) the three acceleration vectors from the actigraph (X, Y and Z) (Figure 1). To be considered as motion, the signal analyzed in the two portions of the algorithm passed through a series of filters acting on the frequency domain. Acceleration peaks that were too far apart or too close together were removed to retain only those representing continuous motion that can be achieved by a person propelling themself in a MWC.
Autonomous propulsion detection algorithm
Once the high-frequency noise was removed from the acceleration data, MATLAB’s Peaks (pks) function was used to extract a vector containing the value of all acceleration peaks measured by the arm actigraph (Figure 1). The following equation was used:
Next, the dynamic threshold used in this portion of the algorithm was obtained by calculating the acceleration peaks’ mean and standard deviation. A sliding window corresponding to twice the sampling frequency (sampling frequency: 30 Hz) was used to calculate the dynamic means and standard deviations of all included acceleration peaks. Means of the dynamic means and standard deviations were calculated once all dynamic means and standard deviations were computed using the sliding window. The resulting mean and standard deviation were used to calculate the propulsion detection algorithm threshold using the following formula: threshold = meanPeaks + 0.5 * standardDevPeaks (Figure 1). All acceleration peaks below the calculated threshold were then removed by the algorithm. A series of two conditions were subsequently applied to all remaining acceleration peaks to ensure that their amplitude was within the expected values (Figure 1). If a peak failed to meet the first condition, it was rejected and did not pass to the second, until all peaks were passed through the two conditions (Figure 1). Finally, following these steps, the algorithm calculated the windows or moments during which the arm wearing the actigraph was at rest and/or moving (Figure 1).
Integration of the two portions of the algorithm
To facilitate synchronization of data from both portions of the algorithm, it was assumed that the two actigraphs used for all data collections (arm and wheelchair wheel actigraphs) were started simultaneously and then installed for data collection. Once the total distance traveled (i.e., distance traveled via self-propulsion and non-propulsion) was calculated using the wheelchair activity algorithm, an optional function was called to remove from the total distance traveled the distance traveled during moments/windows in which the arm was motionless (calculated via the autonomous propulsion detection algorithm), thus enabling calculation of the distance traveled solely via self-propulsion. If nothing was specified, the algorithm calculated the total distance traveled by the rear wheel regardless of how the distance was traveled. If necessary, the algorithm divided the analysis output in 24-h windows as the code was written with long data collection sessions in mind (i.e., to facilitate data collection in real-world settings). Figures 2 and 3 show examples of raw and processed data from both portions of the algorithm during a long data collection period (6 and 12 h), and Figures 4 and 5 provide a more detailed view of how the algorithm processes data (i.e., timeframe of a few seconds). Raw and processed data for a long data collection period – Wheelchair activity algorithm. Raw and processed data for a long data collection period – Autonomous propulsion detection algorithm. Detailed view of the algorithm’s raw and processed data - Wheelchair activity algorithm. Detailed view of the algorithm’s raw and processed data - Autonomous propulsion detection algorithm.



The MATLAB programming required for the wheelchair activity algorithm and the filters were based on the work of Sonenblum et al. 43 The minimal wheel movement to consider a movement as a bout (0.72 m) came from the work of Tolerico et al. who demonstrated that the average minimal speed of movement of MWC users with various health conditions in the home was 0.72 m/s. 5 All the parameters, conditions, and filters of the autonomous propulsion detection algorithm were developed by our research team based on the work of Gu et al. 44 and Pham et al. 45 on a population of walkers. More specifically, these studies informed the concepts of similarity (i.e., acceleration peaks cannot vary by more than 2.5 G to be considered similar) and periodicity (i.e., acceleration peaks must occur within an interval between 0.3 and 12 s). The parameters initially introduced in these two studies (similarity: 5G, periodicity: 0.3 to 1 s) were adapted to reflect the fact that wheelchair travel is generally lengthier (hence the increase in periodicity) and involves less acceleration (hence the reduction in the similarity threshold) than steps taken by walkers.
Data analysis
All acceleration data (i.e., for 10, 50, 100, and 1000 m) were processed using the algorithm presented earlier and are presented as distances traveled in meters. Since our sample size was small (n = 100 for all distances except the 1000 m where n = 10), we bootstrapped (n = 1000) data obtained from the algorithm for each of the measured distances to obtain robust descriptive statistics (mean, standard deviation, 95% confidence interval) for each distance assessed. 46 Accuracy measures (percentage of true value) were also conducted for each trial. All statistical analyses were performed using Excel (Microsoft 365, 2011) and SPSS statistical software (Version 25; IBM, Armonk, NY, USA).
Results
Distance measured using the wheel and arm actigraphs when propelling and obtained using the algorithm.

m: meters, %: percentage.
The distance measurements obtained at the rear wheel are lower than the reference distance for the 10-m propulsion trials, whereas they are higher for the 50-m and 100-m propulsion trials. Furthermore, although the observed and calculated confidence intervals oscillate close to the reference values, they do not contain any of the expected distance values (10, 50 and 100 m). The same applies to distance measurements derived via the arm’s actigraph. The observed and calculated confidence intervals of the 10- and 50-m tests are close to, but do not overlap, the reference distance. The two confidence intervals for the 100-m tests nevertheless include the reference value. Despite the variability observed in the confidence intervals, the observed accuracy remains over 96%, for both arm and rear wheel actigraphs’ measurements.
Distance measured using the wheel actigraph when pushed and obtained using the algorithm.

m: meters, %: percentage.
Although the mean of the 10-m trials is slightly less than 10 m, the 95% confidence interval of the sample and that obtained from the Bootstrap analyses include the target measurement. Conversely, the mean distances calculated by the algorithm for the 50- and 100-m trials are higher than the reference distances and are not included in either the samples’ confidence intervals or those obtained by bootstrapping. Nevertheless, the accuracy of the algorithm remains close to 100% for all trial types.
Total distance travelled while self-propelling over one km in uncontrolled conditions and self-propulsion distance calculated by the algorithm.

m: meters, %: percentage.
The self-propulsion distance data calculated with the algorithm are very close to the expected values, except in the case of False Positive 2 and Team member 6, where a larger difference was observed. Despite this variability, the accuracy of the algorithm remains over 91%, with several distance measurements approaching an accuracy of 100% (mean: 97.96%).
Discussion
Using a publicly available software (MATLAB), we previously developed an algorithm for measuring total distance covered in a MWC and differentiating between MWC self-propulsion and being pushed by another person. The algorithm was designed to derive a range of activity data, such as total distance travelled, average and maximum speeds, and number of bouts, while offering the possibility of separating the output into 24-h windows to facilitate the interpretation of data collected over long periods. These measures are important, as MWC users who cover more distance daily tend to be more active and at higher intensity.5,47 A more systematic measurement of PA metrics such as total distance travelled could help objectify activity patterns performed by MWC users, whether during the practice of sports or as part of activities of daily living. Moreover, the measurement of such PA metrics is all the more important as greater daily distance travelled is associated with better functional outcomes, 48 lower depression scores and greater life satisfaction. 49 The results of our study demonstrated that the developed algorithm offered excellent accuracy, ranging from 96.2% to 99.8% for controlled indoor movement measurements, and close to 98% in an uncontrolled outdoor condition. As MWC users are at greater risk of developing various comorbidities given their generally greater physical inactivity, 50 data collection using actigraphs has the potential to provide important objective clinical data when planning interventions to increase their PA practice. 27 Greater use of actimetry data could also motivate MWC users to engage in more PA, enable them to monitor their health goals more closely, and democratize access to their PA data. 27 Actimetry could also offer MWC users living in remote locations the possibility of having easier access to evidence-based health interventions. 50
Several other authors, such as Popp et al. 17 and Callupe Luna et al. 51 have also worked on algorithms to discriminate between propulsion and non-propulsion in the context of MWC use. Although they reported similar accuracy (93% and 94%, respectively), this was achieved using four sensors (Popp et al.) and an invasive measurement system (Callupe Luna et al.), which had the potential to impede and even modify the natural propulsive motion of using a MWC. 52 The validation trials of their algorithms were also carried out in controlled environments. Our study addressed these limitations, in that our algorithm enabled precise measurement using just two sensors. We also carried out trials in an uncontrolled environment to test the algorithm in real-life conditions. The many trials and algorithm iterations carried out to date have shown that the parameters used to define the similarity and periodicity conditions, the dynamic threshold and the windows of arm motion appear to be the most informative in distinguishing non-propulsion from self-propulsion. However, further tests will be needed to refine these parameters, given the small variability in the current algorithm’s accuracy under uncontrolled conditions.
More recently the emergence of algorithms based on deep machine learning to categorize movements performed while using a MWC have been documented. Unlike other algorithms, these automatically generate the most optimal parameters for processing actimetry data. 53 Although promising levels of accuracy have been obtained in these studies (Van Der Slikke et al.: 83-89%, 54 Fortune et al.: 88-100%, 55 Garcia-Masso et al.: 61-94%, 56 Hiremath et al.: 93-94%, 16 De Vries et al.: >98% 53 ), much research remains to democratize the use of this technology. Indeed, some of the data collections were carried out using proprietary applications (e.g., cellphone-based apps) or measurement monitors. Some of these studies also have been carried out in highly controlled laboratory conditions with highly trained MWC users, and thus might not be fully representative of real-world settings or of novice and inexperienced users. Moreover, one of these studies used a large number of accelerometers (four), 56 which could hinder natural MWC propulsion movement. The integration of deep machine learning into our algorithm could be of future interest to optimize the selection of parameters to be considered when sorting actimetry data. Nevertheless, we believe that our algorithm in its present form makes a contribution to the actimetry literature, in that it uses data from readily available and affordable accelerometers (Actigraph GT3X-BT) and has excellent accuracy in controlled and uncontrolled conditions.
The validation tests carried out in this study were performed by able-bodied team members who had no self-reported disability and who had various levels of MWC experience. While these preliminary tests were important to ensure the algorithm’s reliability, subsequent validation tests should include both inexperienced and experienced MWC users, as they may have developed variable MWC propulsion techniques. 27 Similarly, it will be important to test the algorithm on populations with a diversity of health conditions to ensure generalizability. 8 Our research team is in fact already working on validating this algorithm in MWC users presenting a variety of neurological conditions. Moreover, the present algorithm has been tested with actigraphs placed on the wheel of the wheelchair and on the upper limb of the non-dominant arm. This configuration may not be suitable for all MWC propulsion patterns, such as one foot and one arm or two feet. Further studies will be needed to adapt the data collection method to the reality of users propelling themselves without their upper limbs.27,54,57
This study has some limitations. First, the data for the 10-, 50- and 100-m trials were collected in succession, such that the trials started with 10-m trials, followed by 50- and then 100-m. In this way, participants may have experienced a learning effect throughout data collection. Moreover, this method is not representative of everyday movements, where wheelchair bouts are unpredicted in duration and length. In future validation, it will be important to alternate the distance of bouts and to validate algorithm accuracy during spontaneous MWC activity. Furthermore, the same MWC was used for all trials, therefore not representative of variable MWC size, weight and configuration. Subsequent studies should include various types of MWC, such as sports MWC, to ensure validity and reliability of the algorithm. Although the cycling path (outdoor uncontrolled setting) had small declines allowing for some coasting, we did not specifically validate the algorithm for this type of displacement in the MWC. Finally, the accuracy of the algorithm has still to be tested when performing activities of daily living that might resemble a propulsive movement (e.g. reading, opening a door). However, the present study remained important, in that it ensured that the algorithm really measured what it was supposed to measure (validity). Despite these limitations, this study has several strengths that are worth mentioning. The parameters used to create the conversion algorithm, and the functioning of the algorithm itself, are transparently reported. Distance data collected during all the trials were compared with distance measurements obtained using recognized standard measurements. The accuracy of the algorithm was also evaluated both under controlled laboratory conditions and in an uncontrolled environment more representative of everyday activities. Finally, the current algorithm can be used to calculate the total distance travelled in a MWC, the total distance travelled using self-propulsion, and several other parameters of MWC activity (i.e., number of bouts, average bout length, average and maximum speed).
Conclusion
The present work represents a further step towards a better understanding and characterization of the PA performed by MWC users. Our algorithm was able to derive measures of total distance travelled, as well as distance travelled solely by self-propulsion. It proved accurate over a variety of distances (i.e., 10, 50, 100 and 1000 m), both in controlled and uncontrolled conditions, supporting its use in future studies. Further studies will be needed, however, to validate the algorithm in the context of spontaneous movements, which are more representative of everyday life. It will also be important to ensure that the algorithm remains valid for MWC users presenting a variety of health conditions and propulsion patterns. Better-quality PA measures have the potential to enhance the tailoring of clinical interventions recommended to MWC users.
Footnotes
Acknowledgements
The Authors would like to thank the following persons for their contributions: all members of the research team who contributed to manual wheelchair data collection, and Alexandre Desgagné-Lebeuf, Valérie Moisan, and Jean Leblond for their contribution to data collection and analysis.
Ethical considerations
The Research Ethics Board in rehabilitation and social integration of the Centre Intégré Universitaire de Santé et de Services Sociaux de la Capitale-Nationale waived the need for ethics approval for the collection, analysis and publication of data collected as part of this study (#2025-32390).
Author contributions
Conceptualization: KLB, FR; Funding acquisition: KLB, FR; Methodology: KLB, FR; Project administration: KLB, FR; Investigation: KLB, FR; Formal analysis: RG, BAVA; Visualization: RG; Writing (original draft): RG; Writing (review & editing): RG, KLB, BAVA, FR.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
All data produced in the present study are available upon reasonable request to the authors.