
Abstract
Adaptive kayaking devices currently limit biomechanical fidelity, constraining range of motion and introducing unnatural dynamic profiles that impair user performance. This study proposes a four-bar linkage mechanism that replicates the natural semi-ellipsoidal and multi-phase forward stroke, grounded in biomechanics research and motion capture data. The stroke path was benchmarked against a standard derived from a prior kayak stroke analysis and refined using data characterizing movement across three spatial axes. A representative stroke profile was developed and implemented in a computer-aided design environment, with design optimization performed using engineering simulation tools. Two adaptive linkage models—one for high-performance use and one for recreational users—were validated by comparing their motion paths to the target profile. The high-performance model achieved a deviation of 22.0 mm; the recreational model achieved 79.7 mm. In contrast, a widely used commercial mount showed a deviation of 272.7 mm. This conceptual redesign addresses known biomechanical limitations, offering a scalable assistive solution with translational potential in rehabilitation and adaptive recreation.
Keywords
Introduction
In the United States, approximately 12.1% of individuals live with a significant mobility impairment that interferes with activities of daily living and recreational participation. 1 Beyond physical barriers, over 70% of this population experiences emotional stress and social isolation, underscoring the psychosocial impact of reduced mobility. 2 Adaptive sports, such as kayaking, have emerged as effective interventions that foster both physiological conditioning and community integration.3–5 For individuals with limited motor function, these activities offer opportunities to restore agency, build strength, and enhance quality of life.
However, the effectiveness of adaptive sports participation hinges on the availability and quality of assistive devices. In kayaking, commercial paddle mount systems often prioritize stability over biomechanical realism. For example, the Gamut Paddle Holder (Angle Oar LLC, Yuba City, CA) stabilizes the paddle using a ball-and-socket joint that restricts motion to rotational degrees of freedom (Figure 1). This produces a “teeter-totter” dynamic, in which the paddle pivots vertically but lacks forward translation—a pattern that diverges sharply from the natural stroke.
6
The angle oar gamut paddle holder, a commercially available adaptive kayaking device. The paddle is mounted via a central ball-and-socket joint that enables rotational movement, but limits forward stroke translation, resulting in restricted sagittal plane motion.
Biomechanically, the forward kayaking stroke is a complex, multi-phase movement consisting of distinct catch, pull, exit, and recovery phases. This motion occurs along a semi-ellipsoidal trajectory involving coordinated movement in the mediolateral (y), superior-inferior (z), and anterior-posterior (x) axes.7,8 When users are forced to operate within restricted degrees of freedom, stroke fidelity declines, resulting in mechanical inefficiency, increased energy expenditure, and in some cases, user frustration or device abandonment.
Other commercial mounts, including the Pivot Paddle and Adapt2It, offer minimal assistive pivoting or static support, but these designs similarly fail to enable a forward stroke path that emulates the biomechanical norms observed in trained athletes. 9 These devices are frequently one-size-fits-all solutions that do not scale to user skill levels, strength, or rehabilitation goals, limiting their utility across a diverse user population.
This study proposes a novel conceptual redesign to address these deficiencies. A four-bar linkage mechanism was developed to replicate the semi-ellipsoidal stroke path of kayaking based on biomechanical benchmarks and motion capture validation. The mechanism is designed to support both high-performance and recreational users through scalable crank configurations. Unlike current mounts that merely support static paddle orientation, this linkage enables guided dynamic movement, thereby restoring biomechanical realism and potentially reducing user fatigue. The development and testing of two distinct models—one targeting full stroke replication, the other prioritizing accessibility—aims to improve inclusivity and adaptability in assistive kayak systems.
Materials and methods
The foundational biomechanics for the paddle stroke path were drawn from the work of López and Serna, 6 who quantitatively analyzed forward kayak strokes performed by reference athletes. Their study identified a semi-ellipsoidal trajectory involving coordinated, multi-phase movement across mediolateral (y), anterior-posterior (x), and superior-inferior (z) planes—characterizing the biomechanical standard for effective propulsion. This literature-defined optimal stroke profile served as the target benchmark for this study.
To validate and translate this benchmark into an assistive device framework, Walck et al.
7
conducted a motion capture study using a 21-year-old trained kayaker. Reflective markers were placed on the paddle tips, and 15 stroke trials were collected in a 3D kinematic space. The midpoint between the paddle endpoints was calculated for each frame to establish a single centerpoint trajectory. This trajectory was interpolated into a 22-point Standard Stroke Profile (SSP), with motion bounds of 768 mm along the y-axis (mediolateral), 502 mm along the x-axis (anterior-posterior), and 473 mm along the z-axis (superior-inferior). The SSP was then used as the design target within SolidWorks to guide mechanical linkage modeling (Figure 2). Forward stroke profile of the paddle center point. (Left) Full 3D semi-ellipsoidal path; (Right) sagittal plane view showing the characteristic elliptical arc across the anterior-posterior and superior-inferior axes.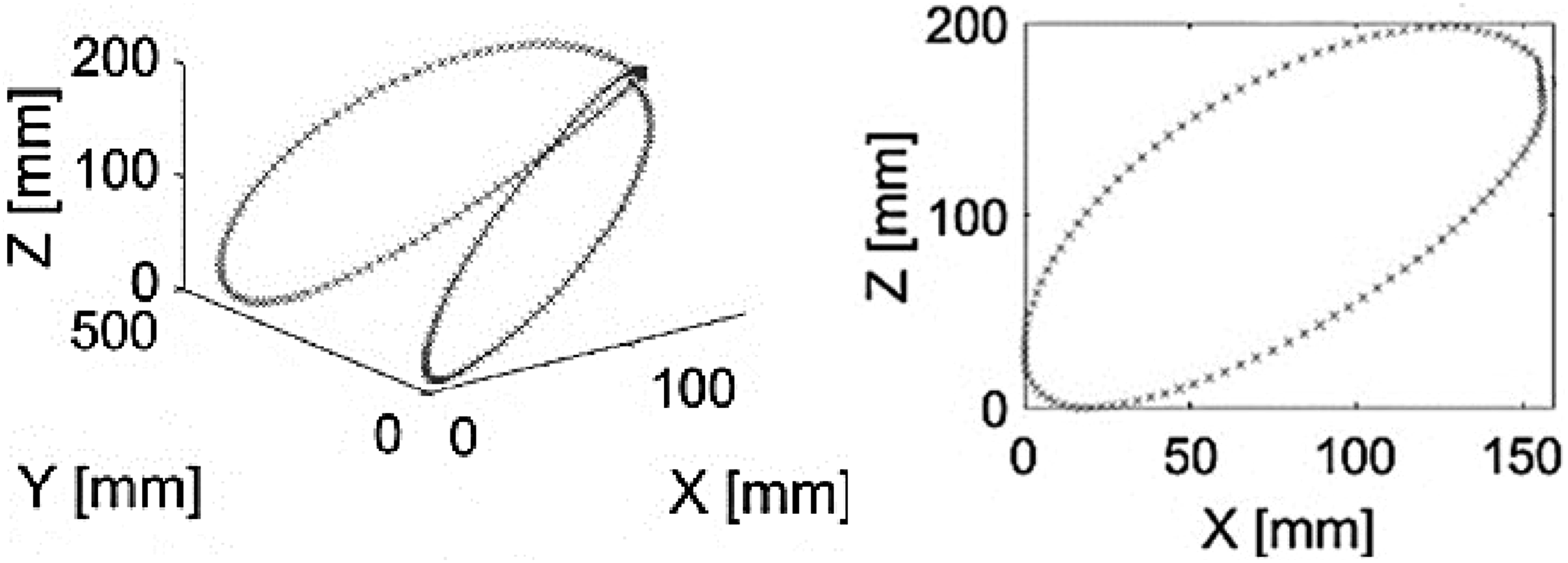
A four-bar linkage mechanism was developed to replicate the sagittal plane projection of the SSP (Figure 3)
11
. This mechanical system included a crank, rocker, coupler, and two grounded base points (P and R). The linkage geometry was defined using the following parameters: • Triangle links: α, β, γ (points A, B, C) • Link lengths: crank (k), rocker (Γ) • Ground spacing: horizontal (u), vertical (v) • Rotation angles: crank θ ∈ [0, 360°]; rocker φ ∈ [φ_min, φ_max] Parametric schematic of the four-bar linkage mechanism, including crank (k), rocker (Γ), coupler triangle (α, β, γ), and grounded base points (P, R). Angular relationships (θ, ϕ) and spatial constraints (u, v) are illustrated
11
.

The Grashof condition
8
was satisfied to ensure the crank could rotate continuously with respect to the grounded links:


To maintain ergonomic compliance, all link lengths were constrained to a maximum of 31.3 inches (0.795 m), consistent with the minimum sitting eye height outlined in the Allsteel Ergonomics Reference Guide. 9
The MATLAB Optimization Toolbox (v2023) was used to perform multi-objective optimization of the linkage design. A set of nonlinear equations (3)–(12) was used to map the output trajectory of the linkage coupler point to the SSP path. Optimization minimized the maximum deviation between the 22-point modeled path and the SSP reference. Kinematic Equations:










Two scaled linkage designs were developed to accommodate different user needs (Figure 4): • Elite linkage: Configured with a full-length crank arm, this design was optimized to replicate the entire SSP with minimal deviation. It targets athletes or users engaged in high-performance paddling. • Leisure linkage: The crank length was reduced by 60% to minimize required input force. This design maintains the same coupler path shape as the elite model but allows for a more relaxed and accessible ROM, suitable for recreational and therapeutic contexts. SolidWorks renderings of the elite (left) and leisure (right) adaptive kayak linkage models. Differences in crank and rocker configuration illustrate the accommodation of variable ROM and force requirements.

Both linkage configurations were tested by simulating the full stroke path and calculating Root Mean Squared Error (RMSE) against the SSP trajectory
Results and discussion
Root Mean Squared Error (RMSE) values were computed between the modeled coupler path and the 22-point Standard Stroke Profile (SSP) for each design configuration. RMSE was used to quantify deviation between the ideal biomechanical motion and the mechanical linkage output, with lower values indicating better stroke fidelity.
The elite linkage closely matched the SSP with an RMSE of 22.0 mm, demonstrating high biomechanical fidelity and suitability for high-performance paddling applications. The leisure linkage, tailored for recreational or therapeutic use, achieved an RMSE of 79.7 mm. This moderate deviation reflects a trade-off between biomechanical accuracy and reduced user effort, achieved through crank length scaling. In contrast, the commercially available Angle Oar Gamut Paddle Holder yielded an RMSE of 272.7 mm indicating significant deviation from the optimal stroke profile (Figure 5). Table 1 summarizes the RMSE values and comparative performance of each configuration. Comparison of modeled stroke trajectories in the sagittal plane. The Elite linkage closely tracks the SSP. The Leisure model retains the shape with scaled amplitude. The Gamut Paddle Holder shows significant deviation from the ideal path
11
. RMSE comparison of linkage designs and commercial paddle mount to the SSP.

These findings suggest that both conceptual linkage designs substantially improve alignment with the natural paddle trajectory over existing commercial alternatives. The elite model provides a high-fidelity replication suitable for advanced rehabilitation or athletic training contexts, while the leisure model emphasizes ease of use for lower-strength or entry-level users.
Importantly, this study addresses a translational gap in adaptive paddling technologies. Current devices prioritize paddle stabilization but often neglect to replicate the kinematic fidelity of the natural stroke, which is critical for improving movement efficiency and reducing user fatigue. 10 By restoring biomechanical realism through a mechanical linkage, this design offers a more physiologically and ergonomically appropriate solution for users with mobility impairments.
Moreover, this modular approach allows customization of ROM and force requirements without compromising the fundamental motion path. This could support wider implementation in adaptive recreation programs and rehabilitation clinics, particularly when combined with sensor-based feedback or actuation mechanisms.
Future development will include user trials, fatigue analysis, and potential integration with electromyographic (EMG) input to assess muscular engagement and clinical outcomes.
Conclusion
This study presents a biomechanically grounded conceptual redesign of adaptive kayak mounts to address a persistent limitation in current assistive devices: restricted ROM and deviation from natural stroke kinematics. By implementing a four-bar linkage mechanism tailored to replicate the multi-phase, semi-ellipsoidal stroke observed in trained paddlers, the proposed designs achieved substantially lower RMSE values compared to commercial alternatives.
The elite linkage model demonstrated the capacity to closely follow the Standard Stroke Profile (22.0 mm RMSE), making it suitable for performance-oriented rehabilitation or advanced adaptive sport training. Meanwhile, the leisure model achieved a balance between mechanical fidelity and accessibility (79.7 mm RMSE), supporting inclusive participation in recreational settings.
This conceptual framework moves beyond stabilization to prioritize motion replication, a critical distinction for reducing fatigue and enhancing neuromotor engagement. In doing so, it responds to a broader translational challenge: how to engineer devices that adapt to user movement rather than constrain it. The modularity of the design allows adaptation to individual strength levels and goals, with future integration potential for actuation or biofeedback systems.
Ultimately, this study contributes to the growing field of rehabilitation engineering by demonstrating how a mechanical solution, grounded in motion capture and biomechanical optimization, can restore functional motion patterns in users with mobility impairments. Continued development and clinical testing will be essential to refine the design and validate its impact on physical performance, user satisfaction, and long-term use.
Footnotes
Acknowledgments
Special appreciation goes Dr Charles Reinholtz, Dutch Holland, & Embry-Riddle’s senior capstone design staff for their time and valuable contributions.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Mechanical Engineering Department, Embry-Riddle Aeronautical University.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.