
Abstract
Self-controlled movement is often thought to attenuate tactile perception, yet in some contexts, agency can enhance sensory performance. This study examines how interstimulus spatial separation and task difficulty modulate the effects of movement agency on vibrotactile frequency discrimination. Participants judged which of two vibrations, delivered at two separate workspace locations encountered sequentially during lateral translation, was higher in frequency, either through self-controlled or externally guided translation of a haptic device. Discrimination accuracy improved at larger distances, with significantly lower performance at the shortest separation across all groups. Self-controlled movement enhanced accuracy in both easy and difficult tasks, but impaired performance under intermediate difficulty at large separations. These findings challenge simple models of sensory suppression and highlight how spatial configuration, motor control, and task demands jointly shape tactile decisions.
Keywords
How to cite this article
Ziat, M., James, J., Hua, J., Burgan, T., Mohamed, M., & Raisamo, R. (2026). When does movement help touch? Interstimulus separation and task difficulty in vibrotactile frequency discrimination. i–Perception, 17(1), 1–13. https://doi.org/10.1177/20416695261416355
Introduction
Our ability to perceive tactile stimuli is fundamentally shaped by how we move through and interact with our environment. Two separable mechanisms predict opposite outcomes. Predictive attenuation down-weights the sensory consequences of voluntary actions: motor commands generate an efference copy that suppresses reafferent input, a principle observed across vision (Cavanaugh et al., 2016; Kim et al., 2015), audition (Miller et al., 2021; Sato, 2022; Whitford et al., 2017), and touch (Blakemore et al., 1998; VanDoorn et al., 2005). By contrast, tactile gating refers to movement-related reductions in tactile sensitivity that can occur during limb motion and can be shaped by descending motor signals and predictive mechanisms, in addition to other sensorimotor factors (Williams and Chapman, 2002; Ziat et al., 2010). At the same time, agency—the ability to initiate and control movement—can facilitate perception by aligning attention, timing, and proprioception with task demands, and by supporting active sampling the environment (Symmons, 2004).
These mechanisms rarely operate in isolation. Attenuation and gating can be modulated by task goals, effector role, friction, and stimulus predictability: suppression weakens on a grasping index finger, with low-friction objects, or when object properties are unpredictable, and it relaxes when texture information must be extracted (Colino et al., 2017; Juravle et al., 2013; Voudouris et al., 2019; Voudouris and Fiehler, 2022). In some contexts, action predictions can even up-weight expected tactile input (Thomas et al., 2022). This literature suggests that whether movement helps or hurts touch should depend on the structure of the perceptual problem.
Here we ask when movement helps vibrotactile frequency discrimination by manipulating two structural factors while the same fingertip receives the vibrations: (i) interstimulus spatial separation (ISSS) refers to the lateral traversal distance (20–140 mm) in the device workspace between the onsets of two vibrotactile events and (ii) task difficulty via the frequency step (
Participants judged which of two spatially separated vibrations was higher in frequency while keeping the index fingertip on a flat-topped pin array. The arm/hand translated the device laterally between activation zones; vibrotactile events were delivered only upon zone entry (no vibrations between events). Movement type varied by who initiated translation: self-controlled (participant) or externally guided (experimenter). This design equates proprioceptive engagement but isolates motor initiation/prediction.
We test the null hypothesis (
By jointly varying ISSS and
Related Work
A fundamental distinction in sensory neuroscience lies between reafferent and exafferent input. Reafference refers to sensory signals generated by one’s own movements (self-generated), while exafference stems from externally caused stimuli. The brain uses an internal efference copy—a prediction of the sensory consequences of motor commands—to distinguish between the two (Bridgeman, 2007; Latash, 2021). When a match is detected between predicted and actual input, sensory responses are attenuated. This mechanism is thought to suppress redundant reafferent signals and enhance sensitivity to unexpected events (Brooks and Cullen, 2019).
This principle has been demonstrated in multiple sensory modalities. In touch, self-produced tactile stimuli are perceived as less intense than identical externally guided ones—a phenomenon often attributed to forward model suppression (Fuehrer et al., 2022). VanDoorn et al. (2005) found that a cold stimulus moved by participants themselves across their own skin was rated as significantly less cold than when moved by an experimenter. Similarly, self-generated tickling is notoriously ineffective due to the brain’s ability to predict and cancel the sensation (Blakemore et al., 1998).
However, attenuation is not the only possible outcome of self-generated movement. In tasks involving haptic exploration or discrimination, agency can enhance perception. For instance, Symmons (2004) showed that participants were better at identifying complex 3D shapes when they moved their hand freely compared to when movement was constrained. Ziat et al. (2010) similarly reported that while self-controlled motion could dampen the perceived displacement of a stimulus, this suppression occurred selectively—particularly for small lateral displacements—suggesting that predictive mechanisms and active sampling can jointly influence perception. More recently, Moscatelli et al. (2019) provided a tactile analog of the Aubert–Fleischl illusion. In their study, participants judged the speed of a moving surface either by holding their hand still and letting the surface move (tactile slip), or by tracking the surface with guided arm movement (kinesthesia). Speed judgments based on tactile input alone were systematically overestimated compared to those derived from kinesthetic cues, suggesting that tactile slip is perceived as more intense or vivid than self-motion.
Kilteni and Ehrsson (2022) formalized the distinction between predictive attenuation and tactile gating. Their work showed that predicted self-generated touches are perceived as less intense (attenuation), while movement—regardless of agency—can reduce tactile sensitivity (gating). Crucially, they demonstrated that these effects are dissociable and reflect different neural mechanisms. This distinction is particularly relevant to our study, in which participants received external tactile stimuli on a moving effector under either self- or externally controlled motion.
Other evidence reveals that the magnitude of tactile suppression adapts to the role of the effector and the task context. Suppression is strong on a moving forearm yet weaker or absent on a grasping index finger that must maintain contact for control (Colino et al., 2017). It diminishes when handling slippery, low-friction objects, particularly without vision, and when object properties are unpredictable rather than predictable (Voudouris et al., 2019; Voudouris and Fiehler, 2022). During texture discrimination, gating decreases alongside improved perceptual performance (Juravle et al., 2013). Collectively, these results support adaptive control accounts in which forward models flexibly adjust feedback gains according to task demands and environmental uncertainty (Franklin et al., 2012).
Conversely, under some conditions predicted tactile input can be amplified rather than attenuated. When a static receiving finger is touched while another finger initiates the action, expected touches are perceived as more intense than unexpected ones, consistent with precision-weighted prediction that up-regulates expected evidence (Thomas et al., 2022). This inversion underscores that prediction need not entail suppression; it can also enhance the reliability of anticipated sensory events.
Together, these findings establish that self-generated movement exerts context-dependent effects on tactile perception. The present experiment extends this work by systematically varying both spatial configuration and frequency discriminability under controlled kinematics. By contrasting self-controlled and externally guided translation of the same effector, we test whether the balance between suppression and facilitation depends on interstimulus spatial separation and task difficulty.
Methods
Participants
Forty healthy adult students (17 female, 23 male, Age
Apparatus and Stimuli
PinArray
The PinArray is a custom-built vibrotactile device (Ziat et al., 2025), featuring twelve flat-topped pins arranged in a
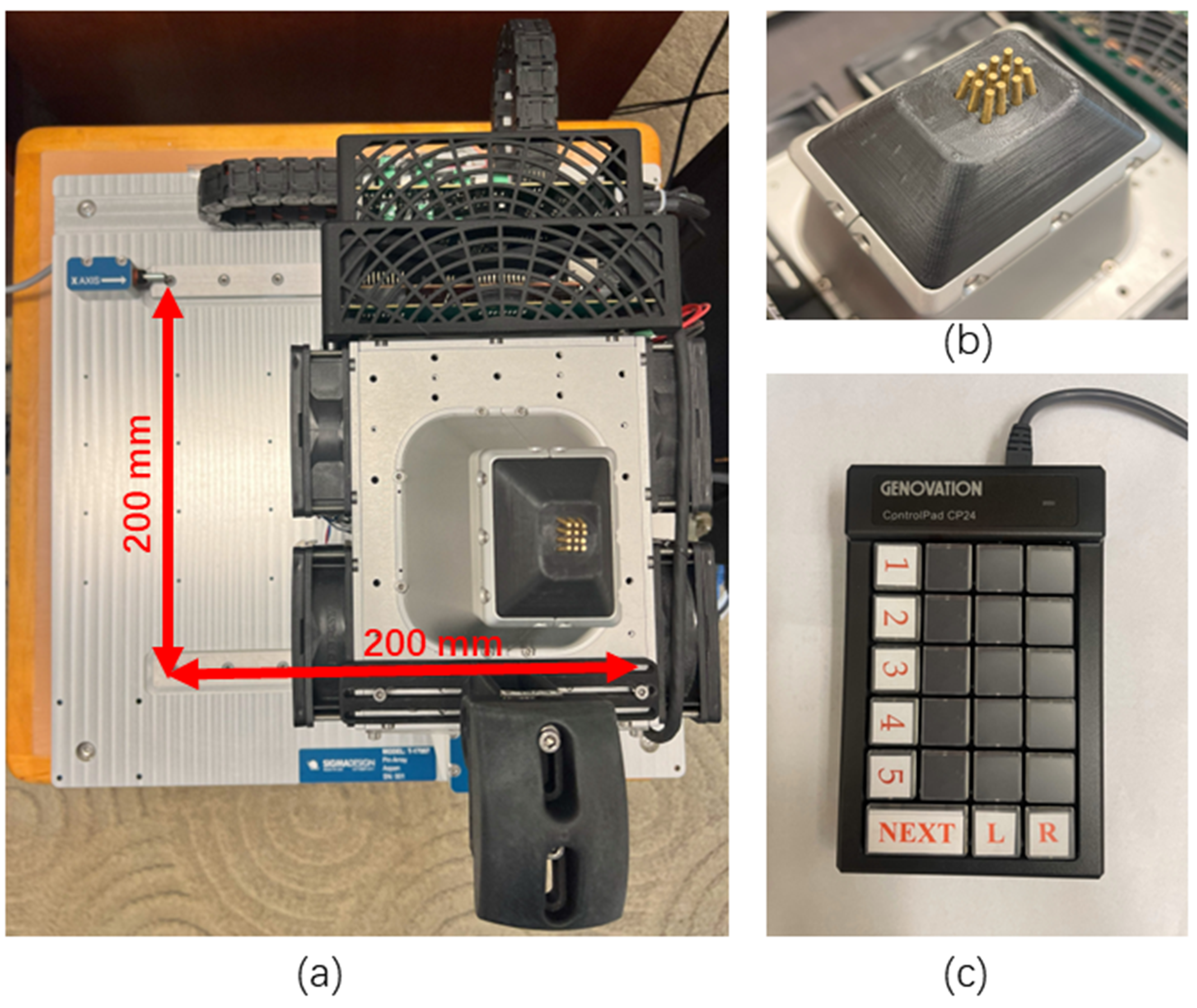
Setup. (a) Top view of the PinArray showing the workspace. (b) A close-up on the

The medial-lateral axis is divided into ten 20 mm zones. This example illustrates two frequencies—LF and HF—positioned at (a) D20—with the first stimulus appearing at zone 5 and the second stimulus appearing at zone 7, with one zone in between resulting in an ISSS of 20 mm; (b) D60—first at zone 4 and second stimulus at zone 8, with three zones in between for an ISSS of 60 mm; (c) D100—first at zone 3 and second stimulus at zone 9, with five zones in between for an ISSS of 100 mm; (d) D140—first at zone 2 and second stimulus at zone 10, with seven zones in between for an ISSS of 140 mm. LF = low frequency; HF = high frequency; ISSS = interstimulus spatial separation.
Vibrotactile Events
For the purposes of the experiment, vibrotactile feedback was delivered only when the device entered a predefined activation zone; the pins remained inactive during movement between zones. Each trial consisted of two vibrations—a low frequency (LF) and a high frequency (HF)—presented at two distinct activation zones along the medial-lateral axis. Because vibrotactile events were triggered by position (zone entry), movement kinematics determine the temporal spacing between the two stimuli and the dwell time of each event (if stimulation persists within a zone).
ISSS
ISSS was defined as the edge-to-edge gap between the two activation zones (each 20 mm wide). Because vibrations were triggered on zone entry, the onset-to-onset traversal distance between the two events was, therefore, (
Frequency Sets
Participants were assigned to one of four groups (G1–G4), each defined by a standard stimulus (SS) and four comparison stimuli (CS) that varied in frequency step size (Table 1). This manipulation varied discrimination difficulty, with larger frequency differences generally yielding easier judgments.
Vibrotactile frequency sets assigned to each participant group per frequency step.

Note: For every group (G) a single standard stimulus (SS)—in bold—was compared to four comparison frequencies, resulting in four pairs (P1–P4).
Procedure
Upon arrival, participants were seated at the apparatus, fitted with noise-canceling headphones playing pink noise, and placed their index fingertip lightly on the flat-topped pins. A handrest supported the wrist for comfort. The task was to judge which of the two vibrations had the higher frequency (left vs. right) by entering the responses on a handheld keypad using left/right keys. Participants were instructed to translate the array at a constant speed throughout. Before testing, participants completed a brief practice phase to familiarize themselves with the sensations and task, receiving correctness feedback. In the testing phase, no feedback was provided.
Participants encountered the two vibrotactile stimuli sequentially as the device was translated laterally using two movement types: self-controlled and externally guided (Figure 3). In self-controlled blocks, participants displaced the device laterally; in externally guided blocks, the experimenter displaced the device while participants maintained fingertip contact so that the stimulated effector moved with the device in both conditions. The starting movement type was counterbalanced across participants. Within every Distance

The two movement conditions: Self-controlled movement and externally guided movement.
In both movement types, the effector was in motion and received tactile stimulation during displacement. Note that the externally guided condition here is not passive touch: in classic passive-touch paradigms the surface moves under a static finger (tangential slip). In our task, the hand–device assembly translates as a unit, the finger stays seated on the pins, and only discrete vibrotactile events occur upon entering activation zones.
Each trial began with the array at a left home location. The next trial was initiated by the participant pressing “Next” on the display, which served as the visual cue to begin. This cue ensured that trial onset was always triggered by the participant in both movement types. In self-controlled blocks, participants began moving the device immediately after pressing “Next.” In externally guided blocks, the experimenter received a simultaneous auditory signal through a headset and began moving the device at that moment. Two activation zones were selected based on the ISSS. Upon entry into the first activation zone, the first vibration (LF or HF) was delivered; upon entry into the second activation zone, the other vibration was delivered. Pins were inactive during translation between zones. No feedback about speed or stimulus location was provided during testing.
Participants completed 192 trials: each of the 32 conditions (4 distances
Results: Discrimination Accuracy and Completion Time
We analyzed discrimination accuracy, defined as the percentage of correct trials in identifying the side (left vs. right) that contained the higher-frequency vibration. We also analyzed completion time, defined as the interval from the participant’s “Click Next” input to their response on the keypad, capturing the full duration of the trial from initiation to decision.
A three-way repeated-measures ANOVA was conducted separately for each experimental group, with movement type (self-controlled vs. externally guided), frequency pair (P1–P4), and ISSS (D20, D60, D100, and D140) as within-subject factors. Discrimination accuracy across the four groups is summarized in Figure 4, while Figure 5 presents the corresponding completion times. In addition, correlation analyses were performed to examine the relationship between accuracy and completion time. Only significant findings are reported below.

Discrimination accuracy for the four groups: Group 1: Distance per movement type, Group 2: Distance per frequency pair, Group 3: Distance per movement type, and Group 4: Frequency pair per distance, including a bar plot for movement type. Error bars represent 95% confidence intervals. The dashed lines represent the baseline (static) performance.

Completion time for the four groups per distance. Error bars represent 95% confidence intervals.
Static Baseline Condition
To contextualize performance under movement, we collected a separate no-movement baseline in an independent sample (
Group 1: 50 Hz Step
There were significant main effects of distance,
ANOVA on completion time shows a significant difference between the four distance conditions,
Group 2: 25 Hz Step
The effect of spatial distance was significant,
Completion time was affected by the distance,
Group 3: 12.5 Hz Step
A significant main effect of distance was found,
Group 4: 6.25 Hz Step
There were significant main effects of frequency pair,
Results: Correlation Analyses
To explore potential links between completion time and discrimination accuracy, Pearson correlations were computed separately for each condition (32 per group). Across the four groups, six conditions showed significant negative correlations between completion time and accuracy (
Significant correlations between completion time and discrimination accuracy.

Discussion
Across all participant groups, tactile frequency discrimination accuracy was significantly affected by ISSS, movement type, and frequency pair. In general, performance improved at greater ISSSs, with the shortest distance (20 mm) consistently produced lower accuracy overall; in some cases this was more pronounced in the externally guided condition under small
The baseline (stationary effector, two sequential vibrations at one site) provides a useful anchor for interpreting movement effects. Movement generally depressed performance at short separations but converged toward baseline as separation increased. For example, in Groups 1 and 2 both self-movement and external movement matched or exceeded baseline. By contrast, in Group 3, both movement types remained below baseline. In Group 4, where baseline accuracy was comparatively low (
Completion time generally mirrored accuracy: shorter response times were observed at larger ISSSs in Groups 1 and 2, and in a subset of conditions, faster responses were significantly correlated with higher accuracy. This pattern suggests that perceptual clarity facilitated both decisiveness and performance. When the signal was strong—due to larger frequency steps or greater ISSS—participants may have reached a decision quickly because the task felt more obvious. In contrast, longer response times may reflect hesitation or uncertainty, possibly due to more ambiguous sensory input. This interpretation is consistent with previous research showing that people take longer to decide when perceptual evidence is weak or unclear (Gold and Shadlen, 2007; Ratcliff and McKoon, 2008). However, because this relationship did not appear in every condition, response time should not be viewed as a universal predictor of accuracy. Instead, it may serve as a useful behavioral indicator of perceptual clarity only in specific situations where stimulus differences are more easily detected. Viewed through a precision-weighting lens, stronger cutaneous evidence (larger separations or larger frequency steps) increases sensory precision and reduces the need to rely on noisy predictions, thereby accelerating decisions; when evidence is weaker, decision times lengthen as accumulation proceeds under lower effective precision (Ernst and Banks, 2002; Weiss, 2003).
The pattern of results complicates any binary distinction between suppression and enhancement in self-controlled touch. While prior work has described attenuation as a signature of efference-based prediction (Blakemore et al., 1998; VanDoorn et al., 2005), our findings suggest that its effects on perception depend on both agency and the demands of the task—specifically, how different the frequencies are and how far apart the stimuli are placed. For example, participants in Group 1 (large frequency steps) and Group 4 (small frequency steps) performed better during self-controlled movement. This suggests that agency can help perception when the task is either very easy or quite ambiguous. In the former case, predictions may help stabilize the experience; in the latter, active control may help participants stay more focused on the timing and location of the stimuli. But in intermediate conditions—such as Group 3 at 140 mm separation—this benefit disappears. Under intermediate
While the present findings offer insight into how agency and ISSS shape tactile discrimination, several limitations constrain their interpretation. First, our task involved fixed stimulus pairs, which allowed us to assess accuracy but not to estimate perceptual thresholds. Future work could adopt adaptive psychophysical methods—such as staircase procedures or method of constant stimuli—to estimate just-noticeable differences (JNDs) or points of subjective equality (PSEs). Second, our study was not designed to disentangle perceptual accuracy from decision strategies or biases—factors that may interact with both agency and spatial context. Third, a concrete next step is to formalize these effects in a Bayesian/precision-weighting framework (Ernst and Banks, 2002; Freeman et al., 2010; Weiss, 2003) with three key latent quantities: (i) cutaneous evidence precision for frequency, (ii) predictive (proprioceptive/timing) precision, and (iii) a gating-noise term that can scale with speed/acceleration or traversal length. Such a model predicts the observed sign flip when predictive precision drops below sensory precision during long traversals with subtle
Conclusion
Our results demonstrate that the effects of self-controlled movement on tactile frequency discrimination are not uniformly suppressive or facilitative, but depend critically on spatial context and task demands. While agency can support perception under certain conditions—particularly when stimuli are clearly distinguishable or spatially ambiguous—it may impair performance when motor-related prediction suppresses tactile input or introduces temporal masking during movement. These findings underscore the importance of considering both motor control and spatial configuration in studies of tactile perception, and highlight the value of moving beyond binary frameworks of suppression versus enhancement. By revealing the conditional nature of sensorimotor integration, this study lays the groundwork for future research that combines behavioral experiments with computational modeling to better understand how movement, prediction, and perception interact.
Footnotes
Author Contribution(s)
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by NSF-PAC (grant no. 2216763).
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.