
Abstract
Interest in continuous psychophysical approaches as a means of collecting data quickly under natural conditions is growing. Such approaches require stimuli to be changed randomly on a continuous basis so that participants can not guess future stimulus states. Participants are generally tasked with responding continuously using a continuum of response options. These features introduce variability in the data that is not present in traditional trial-based experiments. Given the unique weaknesses and strengths of continuous psychophysical approaches, we propose that they are well suited to quickly mapping out relationships between above-threshold stimulus variables such as the perceived direction of a moving target as a function of the direction of the background against which the target is moving. We show that modelling the participant in such a two-variable experiment using a novel “Bayesian Participant” model facilitates the conversion of the noisy continuous data into a less-noisy form that resembles data from an equivalent trial-based experiment. We also show that adaptation can result from longer-than-usual stimulus exposure times during continuous experiments, even to features that the participant is not aware of. Methods for mitigating the effects of adaptation are discussed.
Introduction
Trial-based methods have been a mainstay in psychophysics since its inception over 160 years ago (Prins et al., 2016; Wichmann et al., 2018). Recently, however, there has been a renewed interest in continuous psychophysical approaches that call for the sustained, active participation of the person taking part in the experiment (Ambrosi et al., 2022; Bonnen et al., 2015; Burge & Cormack, 2020; Grillini et al., 2021; Huk et al., 2018; Kuo et al., 2017; Lakshminarasimhan et al., 2020; Straub & Rothkopf, 2022).
This renewed interest is a result of various factors: the capacity for rapid response sampling by fast computers; the ability to adjust stimuli in real-time based on participant responses; the natural extension of research interests from highly controlled lab scenarios to naturalistic environments and behaviors; and advances in Virtual Reality and other immersive systems enabling realistic simulation of more natural environments. If proven reliable, continuous psychophysics approaches would offer several advantages. They would allow for the study of human perception and behavior under more natural conditions, would provide more engaging experimental experiences which would reduce effects associated with participant fatigue and distraction, and the data could be collected in a fraction of the time needed for trial-based methods (Huk et al., 2018).
An issue that needs to be addressed if continuous methods are to play a significant role in the field of psychophysics is data reliability. There are at least two extra sources of variability inherent to a continuous approach where stimuli are continually varied randomly and participants respond concurrently.
There is high uncertainty associated with the stimulus as it must be varied continuously and randomly in order to avoid guessing of future stimulus states. There is greater variability associated with the action system. Rather than the constrained number of response options intrinsic to trial-based experiments (often binary) and a generous amount of time to respond, participants are forced to respond quickly in a continuous experiment and there is a continuum of response options.
Is there a way to utilize the potential benefits of a continuous approach while addressing reliability concerns? Data reliability was bolstered in the case of trial-based approaches with the advent of signal detection theory (SDT, Green & Swets, 1966) because it provides a reliable means of accounting for, and making use of, the variability that is inherent in trial-based data. This is accomplished by explaining the source of that variability and how it relates to key internal states in the observer (Swets et al., 2001; Szalma and Hancock, 2015).
A continuous equivalent of SDT is needed that accounts for the variability in continuous experiments (see Straub & Rothkopf, 2022: for a discussion of the inability of SDT to model participants in continuous experiments). In the present paper, we discuss a novel model of a participant in a continuous experiment that accounts for the noise in the participant’s responses. We show how it can be used to produce data that is as low in unexplained variability as that obtained from a trial-based experiment.
Before presenting the model, it is important to define a realm in which continuous psychophysics could play a useful role, as that will determine the general shape of the appropriate model. Just like the earliest proposed continuous psychophysics method called the Method of Adjustment (Fechner, 1860), modern continuous methods are unlikely to be well-suited for determining precise detection thresholds and discrimination thresholds (or “just noticeable differences”) because of the variability inherent in these approaches (Blackwell, 1952; Farell & Pelli, 1999). Accordingly, recent continuous approaches have been employed successfully for studies that don’t involve determining thresholds. Examples include the estimation of sensory noise while a participant continuously tracks the position of a well-above-threshold Gaussian blob moving on a plane (Bonnen et al., 2015; Straub & Rothkopf, 2022), the measurement of internal noise while a participant tracks an object moving through three-dimensional (3D) space (Bonnen et al., 2017), the perceived motion of an object in 3D space as a function of the delay between left and right eye images (Burge & Cormack, 2020), the approximation of internal sensory and action noise while a participant corrects for random changes in the numerosity and area of a cloud of dots (Ambrosi et al., 2022) and tracing the temporal evolution of a contrast-induced speed bias (Patricio Décima et al., 2022).
A currently unexplored application for continuous psychophysics is the fast exploration of relationships between two above-threshold stimulus variables. In principle, a continuous method could be applied to quickly map the relationship for any study of the effect of one above-threshold variable on another in a psychophysical study. Examples include the effect of orientation of a high contrast surrounding grating on the perceived contrast of a central grating, the perceived tilt of a vertical bar as a function of the proximity of a pair of surrounding tilted bars, the effect of the position of a visual stimulus on the perceived location of an auditory stimulus, and perceived driving speed as a function of proximity to guard rails.
In this paper, we examine how the direction of a moving background affects the perceived direction of a moving target. It has long been known that when a target (moving or not) is placed against a background that moves, the target will perceptually inherit a motion vector opposite to that of the background (Duncker, 1929; Farrell-Whelan et al., 2012; Reinhardt-Rutland, 1988). The effect is referred to as Induced Motion. For example, when a red target circle moves vertically upwards on a computer screen against a background blue frame moving to the right, the target will appear to move upwards, as expected, but also to the left, in a direction opposite to the motion of the background.
In our example experiment, we continuously varied the direction of the background in a random manner so that participants could not guess what direction it would move in next, and asked participants to adjust the target so that it always appeared to move vertically. The difference between the actual target direction and its nominal perceived direction (vertical) was taken as the size of the induced motion effect for a given background direction (Falconbridge et al., 2022; Farrell-Whelan et al., 2012; Zivotofsky, 2004). Participants in the experiment thereby engaged in what may be termed a continuous-correction task. This is similar to a traditional above-threshold nulling task, but where an aspect of the stimulus that affects perception is continuously and randomly perturbed.
We now briefly introduce a Bayes-optimal model of an experimental participant which we call the Bayesian Participant (BP) model. The BP is assumed to have an internal generative model of the processes occurring in the outside world that produce the continuous stimuli experienced. The BP updates estimates of world states using two sources of information: Its own predictions about how the world will change, and new sensory data. The weight given to each is determined by the estimated variance within each information channel. The weights are Bayes-optimal.
The estimates of world states so produced are compared with states representing the participant’s goal and any discrepancies between the two drive participant action. In the case of our example experiment, the world variable of interest was the direction of motion of a target. The internal estimate of that direction corresponds with the perceived direction experienced by a participant. If this direction is left or right of vertical then an ideal correcting action is planned. Planned actions are those that are expected to produce perceptions that are more aligned with the goal based on the BP’s model of its own action system and how its actions change the world. The difference between the planned actions and the actual actions of a participant is attributed to additive noise in the action system.
This is one sense in which our BP model differs from a Kalman filter. Although they are similar in that both estimate hidden world states using a Bayesian inference framework, the BP model goes further by estimating appropriate actions for meeting a goal. We will see that another sense in which they differ is that the BP model assumes constant internal and external noise variance during experimental sessions.
A schematic representation of the BP in the above context is sketched in Figure 1. We outline the BP model in more detail in the next section and provide mathematical details in Appendix A.
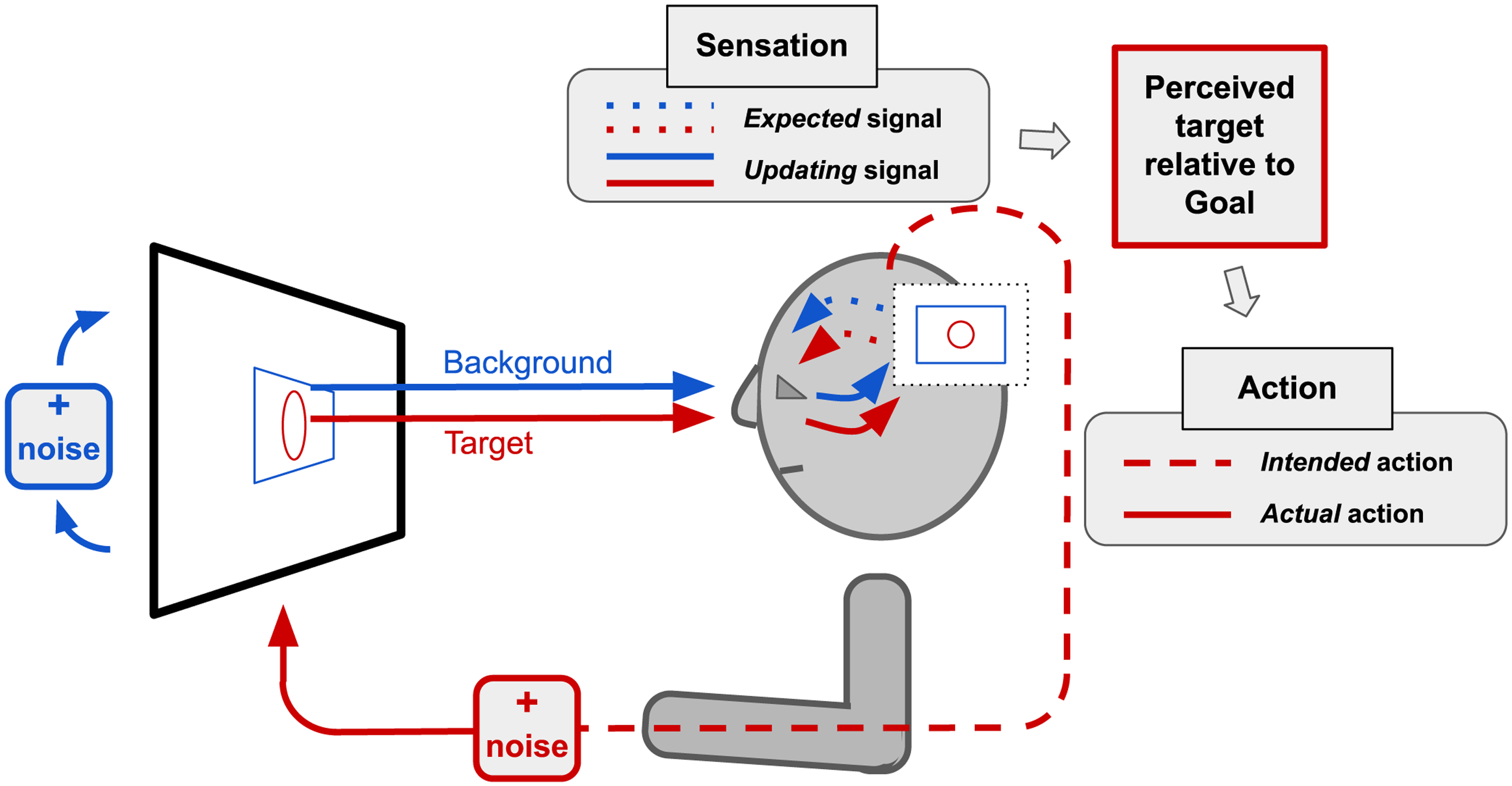
Schematic representation of our Bayesian Participant taking part in a continuous-correction experiment. The background (blue) direction is randomly perturbed (“+ noise”) at regular intervals and the target (red) direction is continuously adjusted by the participant in an effort to keep the perceived target direction close to a goal state. Estimates of world states (“Sensation”) and choices about how to correct the target (“Action”) are Bayes-optimal.
Our model has been designed to aid in the analysis of data from continuous experiments. The way it does so will now be described.
The first assumption for our data analysis approach is that the aim of a two-variable experiment to which our approach is applied is to probe the relationship between the dependent and independent variables. Recall that the dependent variable is the aspect of the stimulus that is altered by the computer, and the dependent variable is the aspect of the stimulus that is under the control of the participant. Updates to the second are made in response to the computer-driven adjustments to the first.
Such an experiment will produce data sets representing the dependent and independent variables, but the data will be corrupted by the extra sources of data variability outlined above.
Our second assumption is that there exists a mechanism in the brain of the participant that is the basis for the relationship between the dependent and independent data values. This mechanism can be thought of as a function; it takes current dependent and independent variable values and produces a “percept” for the dependent variable. In turn, this percept drives actions that determine future dependent values. We label this function
The differences between trial-based and continuous results lie in the sensory processes leading up to
Our BP model makes precise predictions about how the dependent and indpendent variables will be altered by a participant’s sensory system during a continuous experiment to produce inputs to
These new data sets are ideal because they are the values produced by a Bayes-optimal perception-action system. Our BP is similar to an ideal observer (Geisler, 2003), but with the addition of an “ideal” action system; one where the actions are optimal in a Bayesian sense. What we show below is that the ideal data sets produced using our BP model are similar to data sets from a more controlled trial-based experiment.
In the next section, we describe our BP model in enough detail that readers should be able to follow descriptions of its application in later sections. In the ‘Application of the BP Model to Induced Motion' section we detail our induced motion experiment and the application of the BP model to analyze the data from that experiment. In the ‘Comparing Results to Trial-Based Results' section we compare our results to those from an equivalent trial-based experiment conducted previously in our lab. The comparison is promising but it highlights a potential danger associated with continuous psychophysics approaches in general—the issue of adaptation. In our first experiment, participants were exposed to target motion for a prolonged period in one prevailing nonvertical direction. Even though the participants were unaware of this nonvertical component it appeared to cause adaptation in lower-level neurons which led to the participants adjusting the target more and more towards the prevailing nonvertical direction. Methods for controlling the impact of adaption are presented and shown to be effective. The paper closes with a short summary and discussion in the final section.
BP Model
The schematics in Figures 2 and 3 depict both a continuously varying stimulus and a BP responding to the changing stimulus in greater detail than does Figure 1. Figure 2 uses words to describe the stages, employing our experiment as an example, and Figure 3 contains the same stages represented in equation form. Arrows indicate loops and flows driving the stimulus and participant behavior.
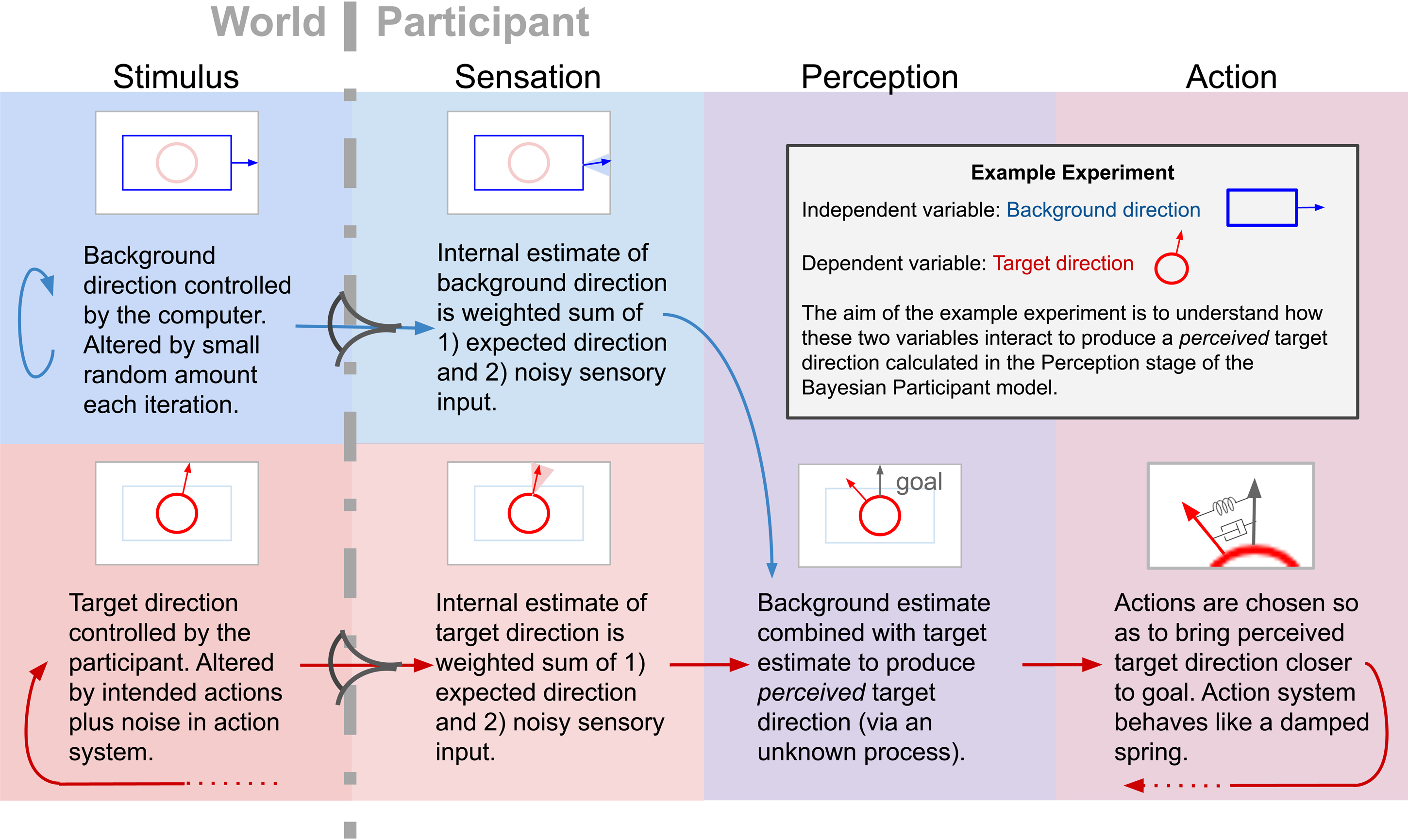
BP model in words. The background (blue) and target (red) update procedures are broken down into stages; changes to stimulus properties (World), the transduction of those properties into sensory states, the estimation of world stimulus properties based on sensations and an internal model of the external world (Sensation), the combining of background and target estimates to produce target perceptions (Perception) and the instigation of actions that drive target perceptions closer to goal states (Action).

BP model in equations. Here, the words in Figure 2 have been replaced with equations. These equations describe all changes that occur at each iteration, both in the world and in the BP. See the text for an explanation and Appendix A for a deeper mathematical discussion along with the derivation of these equations.
As shown in the figures, the BP may be broken down into three stages. We have labeled these stages Sensation, Perception, and Action but note that these are lose categorizations; used only for the purpose of stage separation. Each of these stages will be treated individually below after the stimulus generative process has been described.
Stimulus
The stimulus is composed of (at least) two parts one is controlled by the computer and the other is controlled by the participant. The variables representing the states of these components are labeled the “independent” and the “dependent” variables respectively. The word “dependent” is used because the perception of this variable is a function of the “independent” variable. The independent variable is labeled
The independent variable is randomly perturbed at each iteration; stepped by a small amount,
Sensation
In the first stage of the BP model, denoted “Sensation” in Figures 2 and 3, estimates of
The sensory expectations of the perceptual system are compared to the sensory data arriving from the world. The sensory data are labeled
The actual and expected sensory states are weighted by a weighting factor,
Perception
The estimates of world states are combined in the Perception stage of the model where a “percept” of the dependent variable is formed based on an interaction between the estimates of the dependent and independent variables. This interaction between the independent and dependent variables is not known and the experiment is designed to probe it. For example, in our experiment, we examine target direction perception as a function of the current background and target directions. The internal estimate of target direction is labeled
The interaction is described by the unknown function labeled
The entire data analysis is centered on this stage of the model. The aim is to determine
Action
The action system is based on the commonly used damped spring model of actions by human hands (André et al., 2014; Borst & Indugula, 2006; de Lussanet et al., 2002; Hollerbach, 1981; Speich et al., 2005). The function of the action system is to correct deviations of the perceived dependent variable from some goal state through the use of two forces. The first is a spring restoring force that “pulls” the perceived dependent variable towards the goal and the second is a damping force that slows movements to minimize overshooting.
The action system has two parameters: A spring constant
The actions are assumed to be driven by discrepancies between perceptions and goal states for the dependent variable. This shapes the experimental protocol. In our experiment, rather than have participants simply report the direction of the target stimulus under changing background conditions, they were instructed to adjust the target direction to meet a goal.
We propose that most phenomena involving relationships between two different stimulus properties can be studied using experiments where participants are tasked with adjusting some aspect of the stimulus to meet a goal. But, some phenomena may be more amenable to a tracking task where participants simply report the perceived state of some aspect of the stimulus. Reporting can take many forms, for example, pointing or moving a cursor on a screen to indicate the perceived position of some aspect of the stimulus. In Appendix D it is shown that our BP model can be adjusted slightly to be used in such experiments. This allows for target-tracking experiments like those used in most continuous psychophysics experiments to date (Ambrosi et al., 2022; Bonnen et al., 2015; Burge & Cormack, 2020; Kuo et al., 2017; Grillini et al., 2021; Huk et al., 2018; Lakshminarasimhan et al., 2020; Straub & Rothkopf, 2022).
Note that we have presented the action system independent of any Bayesian considerations. In Appendix C we show how the action system relates to Bayesian Decision Theory (BDT). Briefly, BDT assumes actions are chosen whose outcomes maximize utility. Utility is a measure of the worth of outcomes and takes energetic costs and the value of the outcomes into account (Körding & Wolpert, 2006). Using our experimental data we show that utility is approximately maximized by assuming the actions are a product of a damped-spring action system.
Application of the BP Model to Induced Motion
In this section, we show how the Bayesian Participant model can be applied to a continuous version of an induced motion experiment. The independent variable,

Screenshot of an example stimulus. The target consisted of 30 so-called “Gabor patches” arranged on a ring. Each stripy pattern within each stationary patch drifted in a manner consistent with the global target speed and direction. The remaining patches constituted the background. The patterns in these patches, likewise, drifted in a manner consistent with the global motion of the background. See example stimulus movie in Supplemental Materials 1.
The target consisted of 30 Gabor patches arranged in a circle centered on the middle of the display. Each Gabor remained in place but the pattern within drifted perpendicular to the orientation of its stripes at a speed that was consistent with the global velocity of the target object. The background consisted of the remaining 40 Gabors and the corresponding drift of each was consistent with the global background velocity.
Participants viewed this stimulus on a monitor and were asked to fixate as well as possible on the center of the display area while they continuously adjusted the target direction with a mouse to make it appear to move upwards. Fixating centrally is the best way to judge target direction as the nature of the stimulus calls for the integration of many differently oriented local patterns to get a sense of the global speed and direction of the target circle. This is because it is only possible to see a single component of the target motion by looking at a single Gabor patch, namely the component orthogonal to the Gabor’s stripes. This is because motion along the stripes is not visible as there is no texture to indicate such motion. One needs to integrate across at least two different component directions to get a sense of the 2D global target motion; the more such signals there are, the less noisy the global percept becomes. Global motion produced in this way is referred to as Global Gabor (Amano et al., 2009) or Dynamic Global Gabor motion (Rider et al., 2009).
The background elements also carried a global motion signal. The background direction underwent a random walk which affected the perceived target direction necessitating continuous corrections by the participant in order to keep the target perceptually moving vertically. Stimulus details are given in Appendix E.
The experiment described here is a continuous version of a trial-based experiment conducted previously in our lab (Falconbridge et al., 2022). The reasons for using a Global Gabor stimulus are presented in the original study. The data from the trial-based experiment, presented below as a comparison to our continuous experiment, took about
Training Session
A training session was employed in order to familiarize participants with their task and to tune the model to each participant. The training session involved a small 2D Gaussian luminance “blob” (a 2D Gaussian luminance profile) positioned on the outer rim of the circular stimulus area performing a random walk. The walk consisted of stepping
The goal of the participant was to direct the target’s motion towards the center of the blob. As we wanted our participants to get used to a moving background, during the training sessions we had each randomly oriented background Gabor element move at a random speed creating a sense of movement in the background but without any coherent global direction.
The target direction was varied by the participant using a mouse where rightward movement produced a clockwise change in direction and leftward movement an anticlockwise change. Training sessions lasted
Figure 5 shows the last
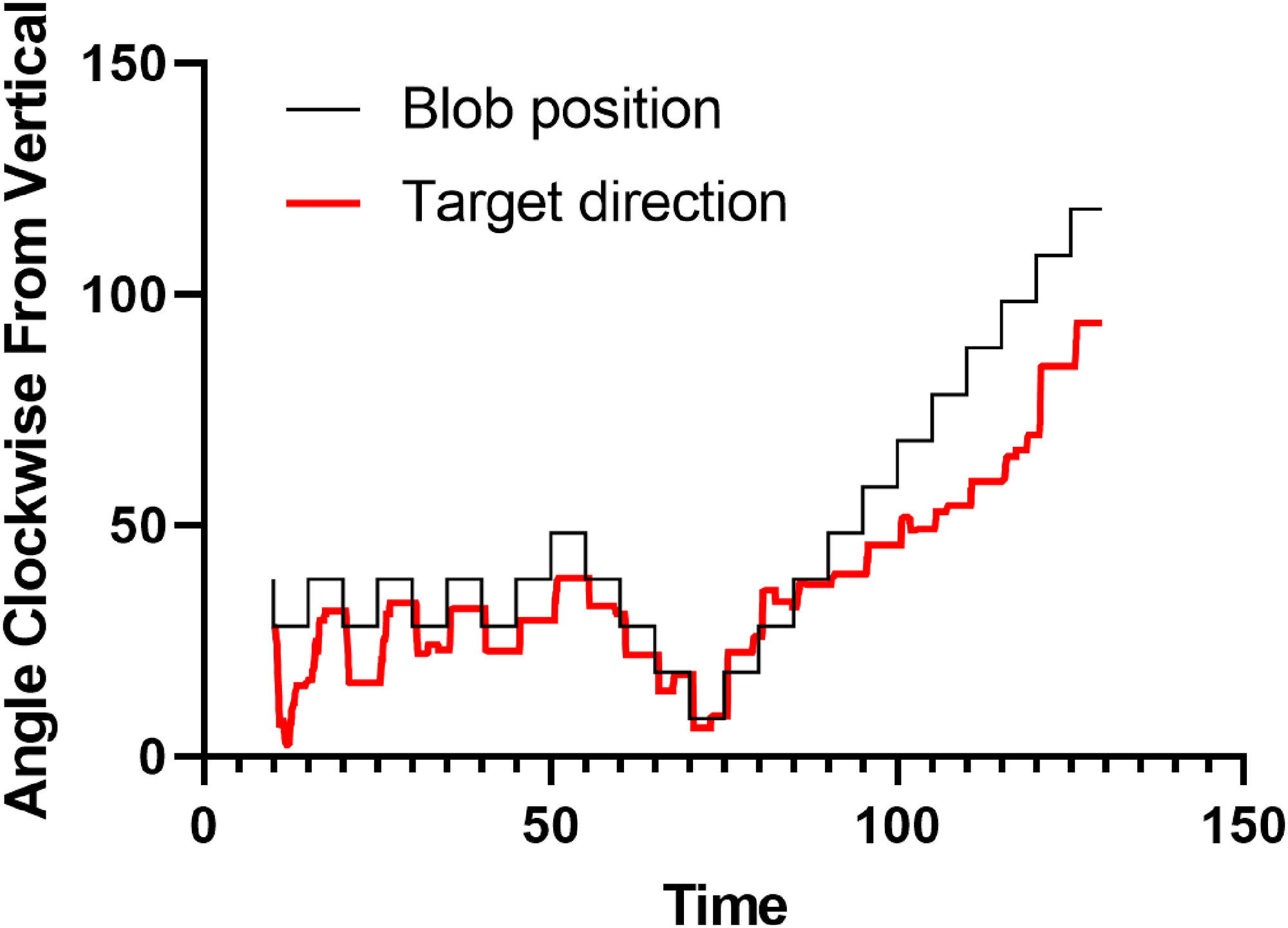
Example time series for blob angular position and target direction during a training session. The participant’s task was to adjust the target direction so that it appeared to move towards the blob which was positioned 17 degrees from fixation outside of the background display area. Participant ED.
As expected, the target data lags behind the blob data, the transitions lack the same square step profile as the blob steps, and the steps end on final values that are some distance from the actual blob values. The average time lag for a response was
To get a sense of how participants responded on average to a single blob step, the responses to each blob step were aligned, rectified to make all steps in the same direction for comparison, and averaged. Figure 6 shows individual rectified responses to steps, the average step response and the result of fitting the damped-spring model in the last panel of Figure 3 (equation A.13) to the average step response for two participants.
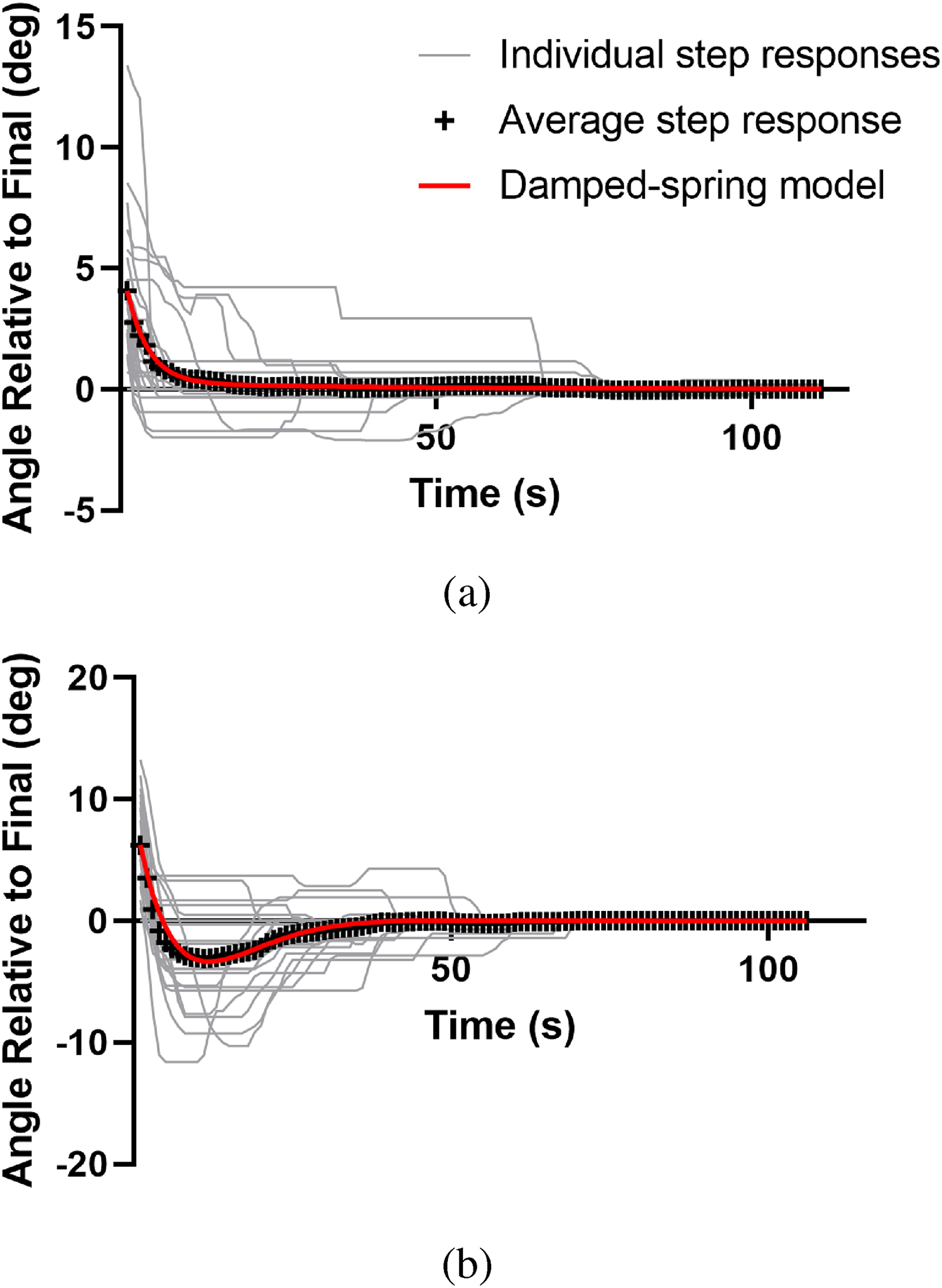
Rectified responses to steps for two participants. Top: Target direction values following the blob steps depicted in Figure 4 for participant ED. Individual responses to a blob step (light gray), the average response (+) and the damped spring model (red) are shown. Bottom: Equivalent step responses for participant MF for comparison. MF’s optimal spring model has a relatively lower damping constant leading to the overshooting seen in the figure.
The optimal spring constants for ED were
The MATLAB code used to analyze the training data is included in Supplemental Materials 3.
Experimental Session
The only differences between the experimental and training stimuli were that the Gaussian blob was not present for the experiment and the background elements drifted coherently to produce a sense of movement in a single direction, just as was done with the target. Target and background speeds were equal but directions were different. The background direction is the independent variable and was controlled by the computer while the target direction is the dependent variable and was controlled by the participant using a mouse as in the training session. Sessions lasted
Example raw time series for the target and background directions are shown for participant ED in Figure 7.

Example time series for background and target directions. The background direction (
Analysis
The relationship between
We denote the corrected data sets
We would expect to see a decreased variance in the

The new background time series is a smoother, lagged version of the original. The new target time series is predominantly an estimate of the intended damped spring-like component of the participant’s actions minus the estimated deviations of the perceived target direction from vertical. The intended component because the unintended action noise
For this particular data set the action noise variance (
In Figure 9 we plot in two ways raw

Raw
Comparing the raw The general trend in target direction as a function of background direction does not change appreciably as a result of analysis but does change significantly at a local level. For example, where it is impossible to trace target changes resulting from background changes in the raw data it is very clear in the processed data. In the processed data, fields of data points give way to distinct lines representing target values as a function of background values. For the background directions that occur more than once, the corresponding target directions are generally more similar after analysis. Analysis reveals a consistency in target direction choices for a given background direction that is not obvious in the raw data. The close-to-overlapping pairs of lines at the lower and upper ends of the curves for the final data are clear examples.
Consistent with the last point, the average of the standard deviations represented by the error bars in the bin plots on the bottom row of Figure 9 decreased from

The quality of data fit provides a measure of the strength of a systematic relationship between raw
This overall improvement was consistent for all data sets analyzed by us. For the participants ED, MF, and CB whose data is presented below, the average reduction in target standard deviation per bin was significant at
The MATLAB code used to analyze the experimental data is included in Supplemental Materials 2.
Comparing Results to Trial-Based Results
An important measure of any new method is how well its results compare to those from previous established methods. To that end, we compare the results of the continuous experiment just outlined to those from a trial-based version of the same experiment conducted in our lab. We present data from individuals who participated in both experiments.
The trial-based version of the experiment is described in (Falconbridge et al., 2022). For each session, a background motion direction was randomly selected from the set represented in Figure 10. For each trial, a target direction was selected and the resulting stimulus displayed for

Continuous compared with trial-based data.
The first thing to note is that the slopes are similar between experiment types for each individual in that the change in target direction for a given change in background direction is similar between experiment types. This aspect of the relationship was measured using the parameter
Unlike the slopes which are consistent for each individual, there is a clear difference between the average vertical offsets in Figure 9 for the two experiment types, particularly for participant CB. The offset is represented by parameter
The cause of the positive offset may have been adaptation. For the
All participants reported at the end of each session when all motion in the scene had ceased and the target and background elements remained on the screen for a second or so, that the target appeared to drift to the left (and downwards). This was noteworthy because, in accordance with the aim of the participant, the prevailing perception during the session was that the target was drifting vertically upwards, not to the right, so a motion after-effect that was leftward was not expected.
In terms of our BP model this indicates that adaptation was occurring at the “sensation” stage of (at least) the dependent variable processing stream where the actual motion of the target (which had a strong rightward component on average), not the perceived motion (which did not), is estimated by the brain. Adaptation at this level would result in progressively lower sensitivity to rightward target motion and, to compensate, one would expect participants to adjust the target in a more and more clockwise direction which would lead to the positive offset observed.
Note also that the reported leftward aftereffect was relative to the background. Although participants may have adapted to the rightward component of the background over time which would make the background less effective at repulsing target motions which, in turn, would potentially counteract adaptation to the target motion, this effect was not as strong as the target adaptation effect.
A Symmetric Version of the Continuous Experiment
In an attempt to avoid the target adaptation effect, we conducted a second experiment where the random direction walk of the background spanned a full 180∘ centered on vertical so that there was, on average, an equal amount of leftward and rightward motion for the background, and by extension, the target. In order to cover more ground without the background having to step faster we extended the data collection time from

Data from Rightward and Symmetric experiments compared along with a “De-adapted” version of the symmetric data.
Interestingly, the offset persisted in the symmetric version of the experiment. It dropped from an average value of
By the adaptation hypothesis, this would lead to an accumulated desensitization to rightward motion and thus a shifting of target directions more clockwise. When the background passes from positive to negative values the target values would be biased in a positive direction. The bias may slowly disappear during the second half of the experiment but the average target directions would be more clockwise than expected.
Only 3 of the 9 sessions happened to have almost exclusively leftward background motion in the first half and, consistent with our hypothesis, these produced the most negative offsets. The other two sessions had a mix in the first half and the resulting offsets were in the middle of the group. It should be possible to minimize these effects by a more deliberate selection of the set of background motions in the testing sequence.
Simple Adaptation Model
To test the adaptation hypothesis further we applied a very simple adaptation model to the symmetric data. The model asserts that the longer the exposure to a rightward (leftward) component of motion and the greater the magnitude of the rightward (leftward) component, the more the user adjusts the target to the right (left) in order to counteract a decreased sensitivity to rightward (leftward) motion. To that end, for each target data point like those shown in Figure 7, we subtracted a constant
The resulting data sets are represented in the right column of Figure 10 for participants ED and MF. The resulting average offset for the group was
As with our BP model, we ask whether the application of the adaptation model produces a more reliable relationship between the background and target data. For ED and MF it does, but for participant CB it does not. The data shown in the bottom left and middle plots for CB in Figure 11 suggests a clockwise bias in the perception of vertical. Accordingly, rather than optimizing the adaptation constant so that the regression line passed through the origin, we optimized for a positive
Note that the positive bias is not apparent in CB’s trial-based results in Figure 10 indicating that there was something about the stimulus, task, and/or other factors in the continuous experiments that evoked the bias. As the trial-based data was collected two years previously it is also possible that the bias developed via external factors over time.
As indicated by the curves and error bars in the last column of Figure 11, applying the adaptation model increased the reliability of the relationship between the target and the background data. The average
Note that average
General Discussion
We have demonstrated, using a continuous version of an induced motion experiment, that our BP model can be effectively applied to analyze data from continuous psychophysics experiments. It allows the conversion of noisy raw independent and dependent variable data sets into cleaner data sets that are comparable to those from traditional trial-based experiments. Table 1 lists the the “pros” and “cons” of our continuous approach compared with a traditional trial-based approach based on our direct experience with the two.
The advantages and disadvantages of our continuous approach compared to our trial-based approach.

In converting from the raw continuous data to our “ideal” data using our BP model, the amount of variance in the data significantly decreased and the relationship between the independent and dependent variables became significantly clearer bringing the data closer to that from a more controlled trial-based experiment. If target perception truly is a function the actual target and background motions, then there should be a consistent relationship between those three variables if noise sources can be removed. The application of a good model of noise sources inherent in the perceptual and action systems should reveal the consistent relationship whereas an incorrect model would further disguise the relationship.
There is decreased variability in the final data produced using our BP model as well as a more consistent relationship between perceived and actual target/background motions. This indicates that the principles upon which the BP analysis is based are a good approximation to the true perception and action principles active in real participants in a continuous experimental environment.
As technology improves, the possibility of collecting human behavioral data rapidly and under more naturalistic conditions becomes increasingly viable. In order to make use of such data, new models of the relationship between internal psychological states and outward stimuli and actions under continuous, dynamic experimental conditions need to be proposed and validated. Our BP model represents such an attempt.
It is a model, specifically, of a participant’s internal states and actions in the case of an above-threshold, continuous-correction two-variable experiment, where one variable is continuously adjusted by the participant in response to continuous changes in a second variable that influences the first. In Appendix D we show that it is also possible to apply the model to continuous tracking experiments involving two variables. We have argued that studies looking at relationships between two above-threshold variables are ideal places to apply a continuous approach.
The data analysis approach taken in our study was to take the dependent and independent data produced by the participant and computer respectively and to refine it. Refining equates to calculating the inputs and outputs of an imagined function
We have shown in the main text and Appendix A how the perceptual system that creates the inputs to
Adaptation Issue
Implementing our BP model with our induced motion continuous experiment revealed a potentially disruptive issue with the continuous psychophysics regime, namely the issue of adaptation. Stimulus exposure times in continuous experiments are generally much longer than they are for trial-based experiments and years of research have established that perceptual systems turn down the gain on representations of persistent stimuli (Webster 2015).
In our case, we had motion in a persistent direction which appeared to reduce sensitivity to motion in that direction leading to participants increasing the motion component in that direction. What our experiment also highlights is that the adapting component of the stimulus may not be registered consciously. Our participants behaved, in our first experiment, as if adapting to a persistent rightward component of target motion, but consciously they would have seen the target moving predominantly upwards, as their task was to keep perceived target direction vertical. Our model offers the explanation that the adaptation must have been occurring at a pre-perceptual stage of processing (sensation stage in Figure 3) where rightward target motion would have been registered.
We offer two approaches for dealing with adaptation in continuous experiments. The first is to alter the stimulus to avoid longer-than-needed periods of exposure to persistent stimulus attributes. This reduced adaptation effects in our case but it did not erase them completely. Our results suggest that a more deliberate selection of the independent variable random walk may further reduce adaptation effects.
The second approach is to remove adaptation effects from the data with the use of a simple adaptation model. We do this in the present paper by simply subtracting a small constant times the sum of the horizontal components of all previous dependent data points. We showed that the resulting data was improved by the addition of this analysis step indicating that our model reflected a process that was actually occurring. Evidence for the process is apparent by consistency in the data and the fact that the difference between the expected relationship between variables and the measured data decreases as a result of applying our adaptation model.
Our simple model of adaptation postulates that at any time, the decrease in sensitivity to rightward positive or negative target motion is simply a constant times the amount of rightward motion accumulated up until that moment i.e.
A given set of neurons may have adapted for a while, recovered, then adapted again as the target direction realigned with the cells’ preferred direction. Our analysis found that the accumulated effect was better modeled by a linear function than an exponential one. The average constant
Relationship to Other Continuous Psychophysics Approaches
Bonnen’s (2015) Kalman filtering approach and Straub’s (2022) Linear Quadratic Gaussian control approach to analyzing data from continuous experiments are closest to our approach. These studies are the only continuous psychophsyics studies among those cited in the Introduction where a dynamic model of a participant in a continuous environment is attempted. Bonnen’s is a model of just the perception side of the participant (using a Kalman filter approach) whereas Straub’s is composed of a Kalman filter which models perception and (various forms of) a Linear Quadratic Regulator which models the action system of the participant. Both models are designed to deal with data from single-variable continuous tracking experiments where participants are tasked with tracking just a single stimulus variable, for example, the position of the center of a random-walking Gaussian blob. In relation to our model, this represents a single-stage, single-variable model equivalent to just the two top left panels of Figure 3 in the case of Bonnen’s model and the two top left panels plus the bottom right panel in the case of Straub’s. In theory, it should be possible to extend these models to deal with two variables. In comparison to Straub’s, our model is much simpler in that it has fewer equations and parameters for the same aspects of the model which makes the modeling of more complex experiments more tractable. However, it also means that fewer internal states can be tracked.
As it is, our BP modeling approach represents a major step forward for continuous psychophysics as it offers a possible picture of the internal states of a participant in an above-threshold, two-variable continuous experiment and allows for the analysis of data from such experiments; both continuous correction and continuous tracking-type experiments. As argued above, quickly exploring the relationships between two above-threshold stimulus variables is an ideal application for continuous psychophysics.
Supplemental Material
sj-m-1-ipe-10.1177_20416695231214440 - Supplemental material for Continuous psychophysics for two-variable experiments; A new “Bayesian participant” approach
Supplemental material, sj-m-1-ipe-10.1177_20416695231214440 for Continuous psychophysics for two-variable experiments; A new “Bayesian participant” approach by Michael Falconbridge, Robert L. Stamps, Mark Edwards and David R. Badcock in i-Perception
Supplemental Material
sj-m-2-ipe-10.1177_20416695231214440 - Supplemental material for Continuous psychophysics for two-variable experiments; A new “Bayesian participant” approach
Supplemental material, sj-m-2-ipe-10.1177_20416695231214440 for Continuous psychophysics for two-variable experiments; A new “Bayesian participant” approach by Michael Falconbridge, Robert L. Stamps, Mark Edwards and David R. Badcock in i-Perception
Supplemental Material
Footnotes
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
Acknowledgments
RSL acknowledges support from the University of Manitoba.
Author Contribution(s)
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received the following financial support for the research, authorship and/or publication of this article: This work was supported by Australian Research Council grants DP160104211, DP190103474, and DP190103103 and by the University of Manitoba.
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.