
Abstract
This article explores how generation and transmission expansion plans (GTEPs) vary and become better suited for the accessibility of smart grid technology (SGT), essentially comprising load shifting, environmental assets and cost rebates. Demand response (DR) resources in smart grids have emerged in debates on GTEP, especially with respect to compromising system security. The planned model is designed as an innovative GTEP solution with DR resources that minimize cost by decreasing the peak load of the basic plan. A chaotic grasshopper optimization algorithm (CGOA) is used to optimize the results of the proposed GTEP model.
Keywords
Introduction
GEP and TEP support for smart grid technology
The traditional generation and transmission expansion plan (GTEP) concerns are to develop grid position, size, and the extent to which GTEP technologies are achieved in a planning period to support forecasted future load demand. Conversely, in the instance of smart grids, the accessible smart grid technology (SGT) affects or will impact GTEP issues. Ordinarily, the impacts of SGTs, for the most part include dropping peak loads and operational costs to enhance investment efficiency and environmental benefits. With the objective of attaining technological improvement of novel GTEP systems, the planning and arrangement of the models are examined, which comprises different advances, elements, and necessities. An SG generally conjures thoughts of a kind of technology used by the public to convey electricity transmission services through present power systems by PC-based methods of long-range organization and automation. The number of operations that may be employed on an smart grid (SG) before the information transportation infrastructure is organized is increasing as quickly as modern groups build and generate them. The benefits of SGT include enhanced cyber security, the organization of sources of electrical energy such as solar alongside wind power and electric vehicles (EVs) associated with a smart grid.
A novel multi-objective, multistage, and multi-area model used for long-distance extension planning, layered on coordinated GTEPs incorporating consistent power mounting, is given in the study by Unsihuay-Vila et al. 1 Synchronized wind–thermal planning for managing hourly wind generation issues are granted by Kamalinia and Shahidehpour. 2 The incorporation of renewable energy assets into an electric utility’s generation expansion plan (GEP) has been examined at different penetration levels and is described in the study by Karunanithi et al. 3 The optimization and efficient linearization technique proposed by Aghaei et al. 4 using mixed-integer linear programming, which is required to adjust the nonlinear prosody toward a reliable set of linear terminology. A novel type of network planning is the advanced generation automatic meter reading system for which the protocols and topology optimization of array formation are presented in the study by Li et al. 5 Two-level unit commitments influencing a system facing large uncertainties in an adaptable robust optimization situation are described in the study by Wei et al. 6 The idea of suggesting feasible SG at different altitudes in power systems present in India has implied that a highly developed computerization system must also be present in the study by Bala et al. 7 The significance of information gap decision theory (IGDT) to support the division network controllers in selecting and delivering assets used for gathering the demand of their consumers is shown to be easily reached and is granted in the study by Soroudi et al. 8,9 Two-stage stochastic programming through a fixed plan of action to explain the multistage expansion issue is presented in Alvarez Lopez et al. 10 An inaccurate fuzzy-stochastic energy model is matured 11 for planning, environmental management, and energy system management under several uncertainties. An interval parameter min–max regret programming (IMRP) technique is urbanized in the study by Dong et al. 12 to maintain power association framework planning under uncertainty. As seen from pilot projects and demand response (DR) programs, energy, capacity, and additional benefits are described in the study by Rahimi and Ipakchi. 13 DR is a strategy utilized by electric utilities to lessen or exchange energy usage during peak hours of the day, although the demand for electrical energy is low during off-peak demand periods. The main advantage of DR resources is to decrease the load demand during peak periods or to shift demand to off-peak times. DR covers approving consumers toward select ancillary loads that can be turned off by virtue of the consumers or by the utility provider at peak times. This ancillary load approval is a predetermined arrangement among the service provider or an intermediate firm such as an aggregator that works with the customer by virtue of a definite load and price situation for specific time periods. As power plants and the transmission framework are planned to cater to the most extreme potential demand, diminishing peak demand through spreading it out during other times of the day enables utilities to reduce total operating costs and moderate potential grid decay alongside installation costs. Comprehensive evaluation of GTEP problems from various aspects and perspectives is explained in the study by Hemmati et al., 14 whereas the study by Tekiner-Mogulkoc et al. 15 inspects how the electric power system GEP develops the opportunity presented by SGT. New uncertainty management structures for optimal GEP integration in the designs of robust single-stage and two-stage optimization problems are offered in the study by Dehghan et al. 16 A multi-objective TEP demonstrated the foundation shared between cost and risk is portrayed in the study by Qiu et al. 17 Dong Han 18 determined the robust evaluation structure for the significance of SGT in GEP through enforced uncertainties. A low-voltage direct current (DC) microgrid, which uses computerized control system techniques, an orderly coordination control stratagem considering optimization of a hybrid energy storage system (HESS) was studied by Yuvaraja and Ramya. 19 According to bidirectional ability, wind application has variable acceleration, which connects a large quantity of wind ability bearing system with a doubly fed induction generator (DFIG) fed by a two-stage cast converter (TSMC) system. The accentuation action of TSMC and arithmetic standard for DFIG are presented in the study by Yuvaraja and Ramya. 20 Modeling and field-oriented control of permanent magnet synchronous machines, with a focus on their applications in the variable speed domain in photovoltaic sources, are presented in Yuvaraja and Gopinath Mani. 21 A novel sag and peak detector by means of a delta square operation for a single phase is suggested by Yuvaraja and Ramya. 22 A dynamic method of utilizing the maximum energy from solar power generation to charge a battery by means of a maximum power point tracker with the new controlling parameter for improved stability in the power system network is established in the study by Yuvaraja and Ramya. 23 The key literature and proposed chaotic grasshopper optimization algorithm (CGOA) are presented in Table 1. In this article, the planned approach can offer the best resolution wherever there is no surplus generation capacity for a few applications of SGT. The rest of this article is arranged as follows. The problem formulation of GEP with SGT is indicated in the “Problem Formulation” section.
Key literature and the proposed approach.

RO: robust optimization; MOEA: multi-objective evolutionary algorithm; CPLEX: software tool; MCS: monte carlo simulation; MESEDES: multi criteria sustainable energy developing system; IFS: inexact fuzzy stochastic programming; SGT: smart grid technology; CGOA: chaotic grasshopper optimization algorithm; DR: demand response; IGDT: information gap decision theory; IMRP: interval parameter min–max regret programming.
The process for solving GEP via CGOA is examined in the “Implementation of CGOA for GTEP with smart grid technology” section. The applications of the CGOA to GEP with SGT for the test system and the complete numerical solutions are discussed in the “Results and Discussion” section, and conclusions are presented in the “Conclusions” section.
Problem formulation
Objective function of GEP with DR
The purpose of the accessibility optimization problem is to coordinate the total cost comprising investment costs, reliability costs, operation and maintenance costs, generation costs, and environmental costs. The GEP issue of SGT corresponds to ascertaining optimal decision vectors over a planning horizon and is defined as follows:


where



Considering the impact of DR, the supplementary generation capacity in the planning horizon can be diminished because of its commitment, thus the cost of generation can be changed from equation (4) to equation (5).

where pt represents generation capacity from the DR resources, ht represents revenue and btj denotes existing generating unit capacity (MW).


where the reliability cost (outage cost) is calculated using equation (7). lol t stands for loss of load at time period t and Clol t represents the cost for loss of load. By minimizing the outage cost that maximizes the reliability of the system.
Objective function of TEP with DR
The objective function is the summation of DR costs, investment costs, and operating costs. The line investment cost Cij is the length of every transmission line.

where

where fi,t is the operating cost; C DR is the demand response cost; b 1i , b 2i , and b 3i are generator cost coefficients at i; Pgi is the real power demand; and Qgi is the reactive power demand.


Implementation of CGOA for GTEP with SGT
In the standard GOA, linear decrements are not necessary, but in the CGOA, chaotically differing variables C 1 and C 2 may be more favorable for the search, which may also allow the method to converge on the optimum value rapidly. The main problem GOA suffers from is the global confluence speed; hence, it easily falls into local optima, which causes low accuracy. Therefore, chaotic methods simulating GOA are used for validation and to address this problem. The CGOA is very capable, the results still stray from each other until the last part of the search, and the parameters of the CGOA are taken from reference. 24 The most important parameters of CGOA are C 1 and C 2, which are responsible for the convergence of grasshoppers to the target greater than the course of iterations. The parameter C 1 balances exploration and exploitation of the population, whereas C 2 reduces the attraction zone, comfort zone, and repulsion zone among grasshoppers. The values of those parameters are crucial in determining the convergence speed and how to renew the location of the grasshoppers in the CGOA. Although the CGOA is especially powerful, the results are still inconsistent with each other in the last part of the search. In CGOA, those parameters are set to 1 in the primary stage of the optimization process to highlight their exploratory nature. 25 Finally, the values are linearly reduced from 1 to 0.00001 to support exploitation. The combination of the parameters (C 1 and C 2) shows that the subsequent explanation may help reveal how the projected chaotic algorithms are theoretically efficient.
The chaotic C
1 assists the GOA in renewing the positions of grasshoppers chaotically, which improves exploration. The chaotic C
2 allows the GOA to change the attraction zone, comfort zone, and repulsion zone to improve the GOA because there might be dissimilar values for the C
2 parameter. Different chaotic maps for C
1 and C
2 offer dissimilar exploration and exploitation arrangements for the GOA. As chaotic maps explain chaotic behavior, a generation of the GOA might emphasize either exploration or exploitation. Chaotic parameters provide exits for the GOA if there should be an occurrence of local optima setup issues. In the case of finding a hopeful area of search space, those chaotic parameters assist GOA in chaotically developing the neighborhood.
The parameter C 1 is accountable for reducing the movement of grasshoppers that are approximately at the target, which means that C 1 basically balances the exploration–exploitation of the intact horde at the goal. In an unexpected way, the parameter C 2 directly decreases the search space available to manage the grasshoppers to find the optimal solution. A related point to consider is that the adaptable parameter C 1 adds to the decrease in repulsion or attraction power between grasshoppers corresponding to the number of iterations, although C 2 diminishes the hunt analysis by focusing on the target as the number of iterations increases. To balance the exploration with exploitation, C 1 is diminished relative to C 2 to increase the number of iterations. Correspondingly, the normal values of C 2 are decreased to limit the comfort zone with respect to the increase in the iteration count. Both parameters (C 1 and C 2) are considered as a single parameter and are modified using equation (9); K represents the maximum number of iterations.

The flowchart for the implementation of CGOA for GTEP with DR technology is shown in Figure 1.
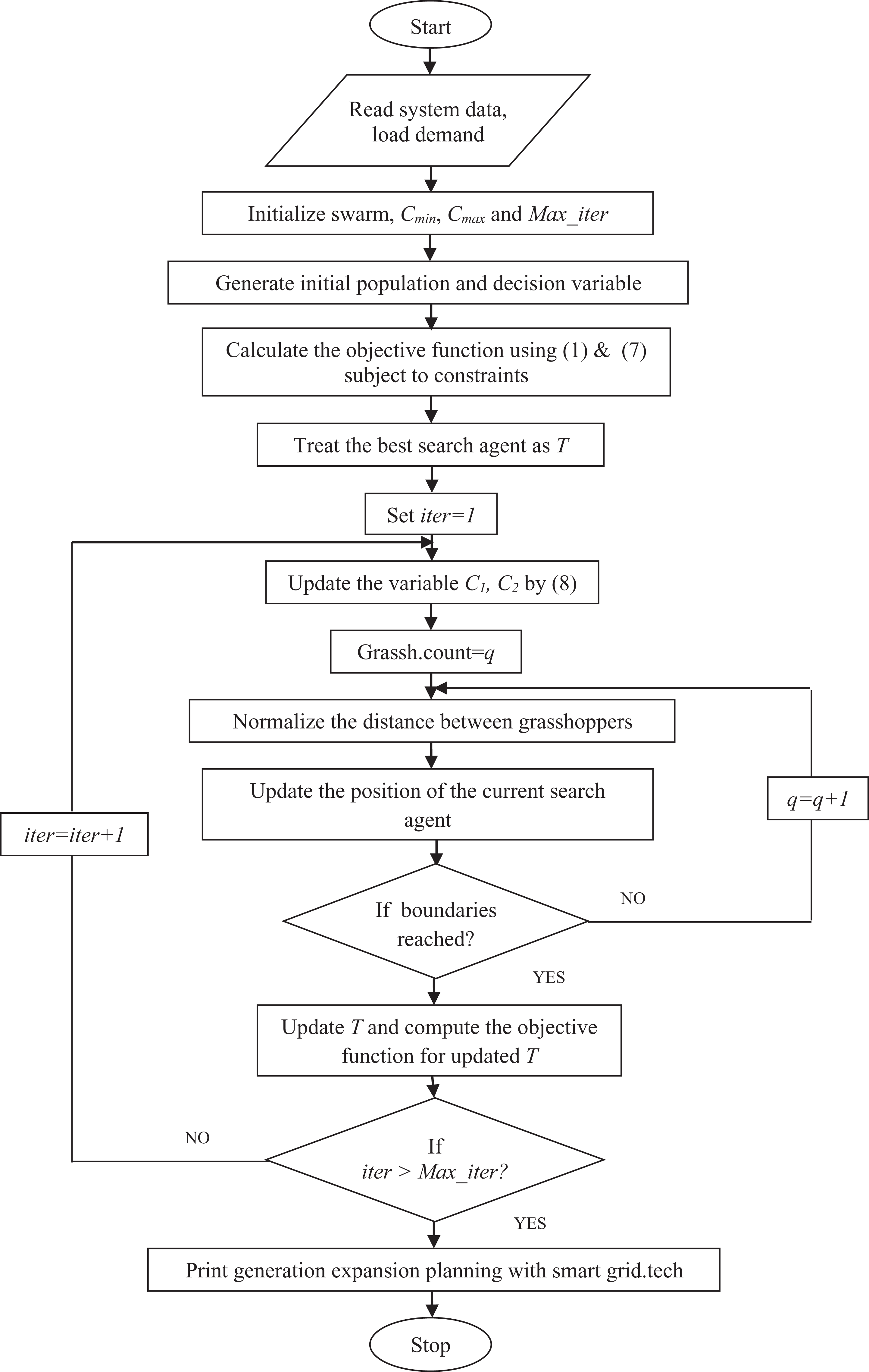
Flowchart for GTEP with smart grid technology using CGOA. GTEP: generation and transmission expansion plan; CGOA: chaotic grasshopper optimization algorithm.
Results and discussion
GEP and TEP with the DR simulation process ran for a 7-year planning period. The test system comprises 32 generating units, including coal (steam), oil (steam), combined cycle gas turbine (CCGT), nuclear, and oil (combustion turbine) in the existing network. The data on existing and candidate generation units are taken from the literature.
18
The total equipped generation capacity demand is more noteworthy than the yearly peak load and the load loss under unwavering reliability conditions. Here, we presume that the peak load in the essential part of the year is 2900 MW and that the annual demand will be expanded to 6% via the technique of urbanization, $10,000USD/MW is the unmet cost and the steady discount rate is 0.05. The IEEE 24-bus RTS framework is connected to the test TEP model; 3090 MW is the peak load, and 4900 MW is set as the total generation capacity. DR resources are arranged at each bus, and the FORs are 0.01. The transmission system should be stretched out for the ensuing 5 years, and the annual growth rate is set at 5%. The new power line capacity is 120 MVA, and the transmission line investment cost is $50 M/100 km. All the transmission losses are ignored, and DC power flow analysis is assumed. MATLAB 7.9 software on a PC with a 2.20-GHz Intel core i3 CPU and 2 GB of RAM is utilized to run the test systems. To scrutinize the suitability of the developed software tool, the following contextual case studies are performed. Case 1: GEP without DR Case 2: GEP with DR Case 3: TEP without DR Case 4: TEP with DR
Numerical results
The outcomes of weekly peak load reduction tests for cases 1 and 2 using CGOA are shown in Figure 2. The peak demands are 7452 MW and 7168 MW for cases 1 and 2, respectively. Compared with case 1, the planned model can achieve a higher peak load reduction because it organizes the optimal DR solution while obtaining the optimal operation and investment plans. In particular, our CGOA is also a useful tool, helping system operators make decisions on when and how many DR resources should be utilized. The incorporation of DR is of significance as far as guaranteeing the safe, economical, and reliable conditions of a power system with power dispersion. In addition, Figure 2 demonstrates the weekly peak load assessment results from GEP with and without DR separately.
Weekly peak load reduction for cases 1 and 2 using CGOA. CGOA: chaotic grasshopper optimization algorithm.
Table 2 presents that the GT with lesser economic costs will be preferred over the planning period if the decision-maker is concerned with attaining lower cost arrangement. In addition, the eco-friendly GT will face larger deliberation on the lower emission scheduling plan when only the unsure load demand is measured and the overall system cost, together with the utility operational and investment costs in case 1 is $10,020 million USD. Seeing the impact of the uncertain SGT on the projected GEP, the best possible robust extension policy is presented in Table 3. Through the deliberation on preserving financial costs in the scheduling, various CCGT generation units are adapted in the investment arrangement. The outcomes in Table 3 indicate the total system cost of case 2 with respect to the dubious SGT is approximately $8262 M, which suggests that the SGT has to accumulate investments for generation capacity. Figure 3 shows the total cost comparison between GEP without DR and with DR resources using CGOA. As shown in Figure 3, the entire cost for case 2 is much lower than that of case 1.
Optimal GEP for case 1 using CGOA.

CCGT: combined cycle gas turbine; CCS: carbon capture and storage; CGOA: chaotic grasshopper optimization algorithm.
Optimal GEP for case 2 using CGOA.

CCGT: combined cycle gas turbine; CCS: carbon capture and storage; CGOA: chaotic grasshopper optimization algorithm.

Total cost for cases 1 and 2 using CGOA. CGOA: chaotic grasshopper optimization algorithm.
The comparison results suggest that our model is more financially effective than the other tested models. Additionally, from the comparison among Tables 2 and 3, the total additional capacities in case 2 are lower than those in case 1 for all years of the planning period. The outcomes in Table 3 point out that CCGT is the best performer in the planning horizon, because the price of CCGT is lower than the other models. Furthermore, in the last part of the planning period, the oil investments, however small relative to the CCGTs, are making strides.
Wind and CCS from eco-friendly technologies are additionally included in the plan. In the low-carbon technology case 1, for example, substantial CCS and wind are added when compared to adopted generation technologies, so the eco-friendly impact is tinted.
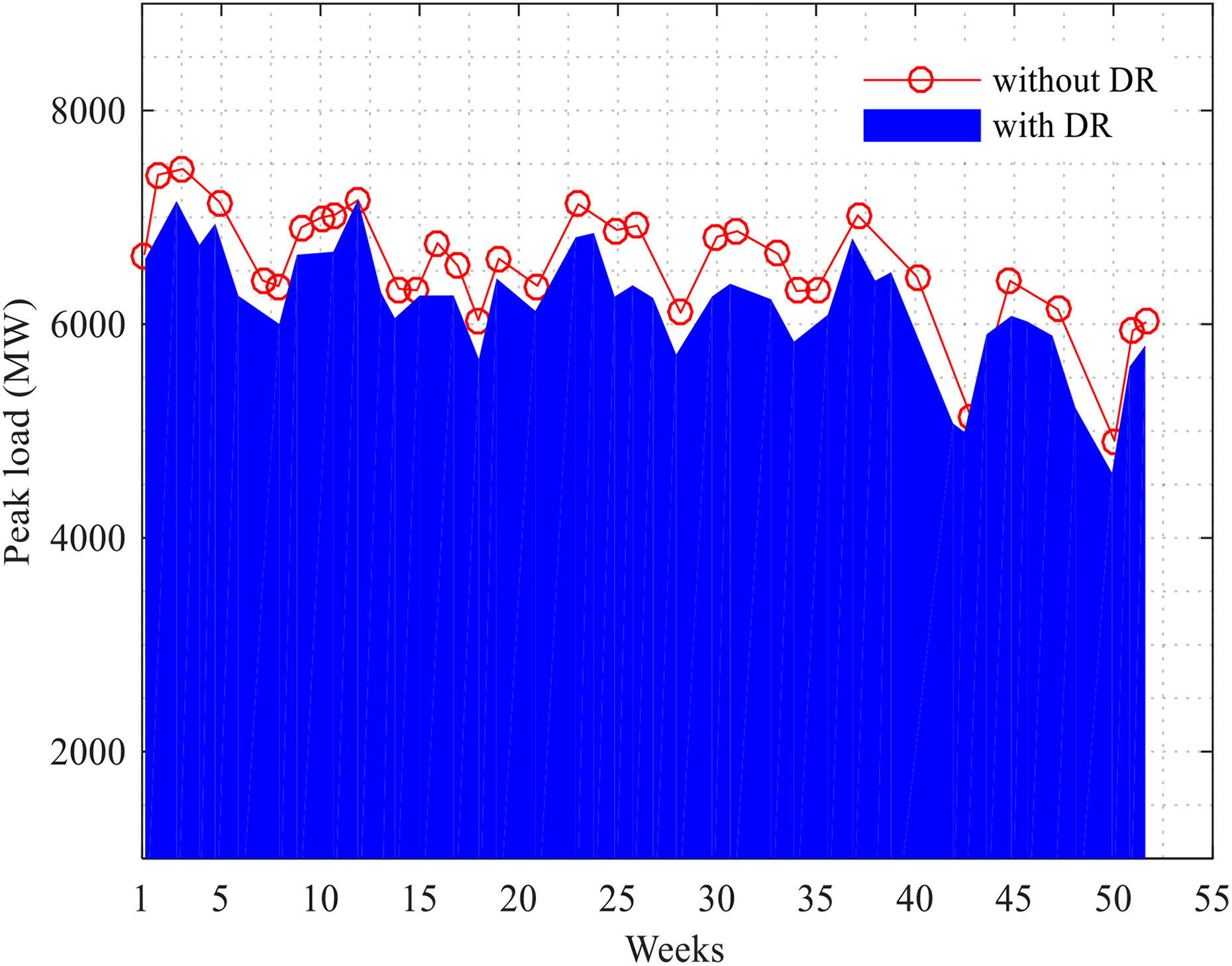
The results of additional transmission lines for the two cases are given in Table 4. As observed, in case 3, the numbers of newly included transmission lines are lower when contrasted with case 4, due to the network transmission capability prerequisites to be improved and additional transmission lines are required at components where the meshed networks are weedy. Similarly, this demonstrates that, notwithstanding shaving the peak demand, the decreasing cost of transmission network expansion has a positive impact on the network sufficiency, as shown in Figure 4.
Optimal TEP for cases 3 and 4 using CGOA.
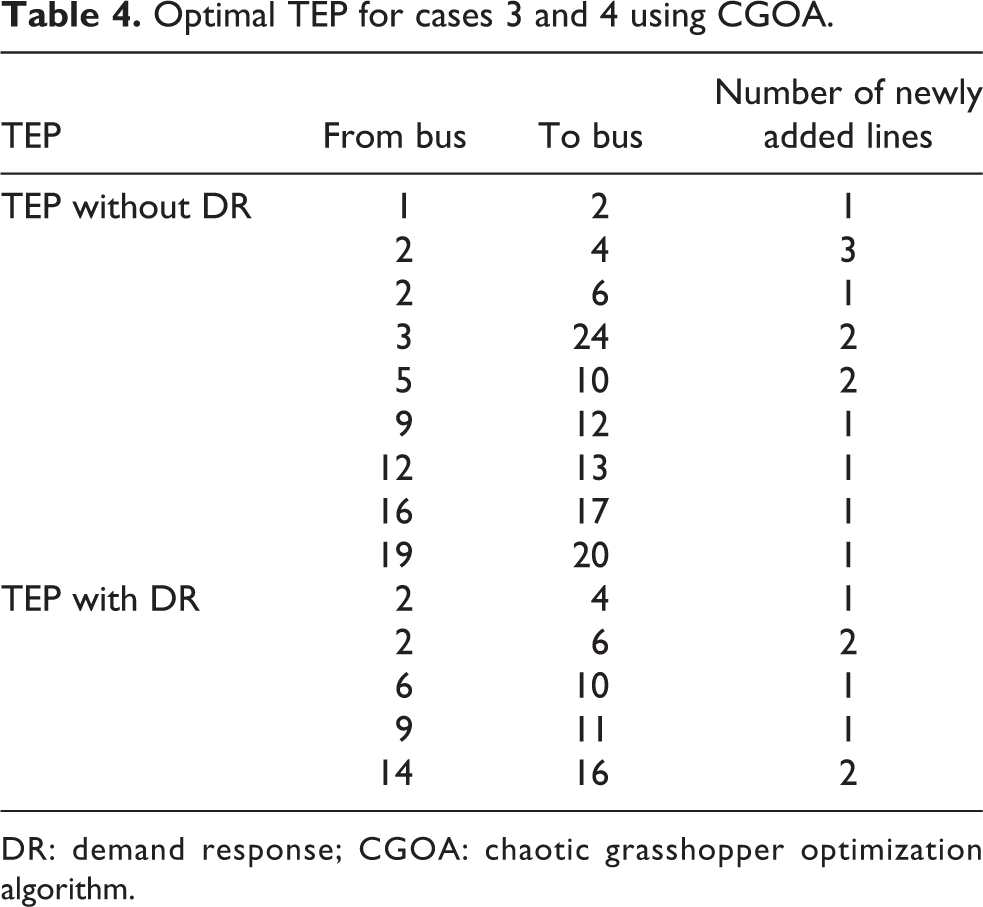
DR: demand response; CGOA: chaotic grasshopper optimization algorithm.

Weekly peak load reduction for cases 3 and 4 using CGOA. CGOA: chaotic grasshopper optimization algorithm.
The results of the weekly peak load reduction in cases 3 and 4 are shown in Figure 4. The proposed TEP model can achieve peak load decreases since it sorts out the optimal DR solution while obtaining the optimal investment and operation plans. Accordingly, our method can competently defer network expansion and decrease the system OC, thus improving the network efficiency. Moreover, as represented in Table 5, under the load conditions determined by cases 3 and 4 ($3510.71 M for case 3 contrasted and $2392.12 M for case 4), and fewer transmission lines are built in case 4. This proves that in addition to shaving peak demand, as shown in Figure 4, DR has a positive impact on the network capability, thus diminishing the cost of network expansion. In addition, load reductions throughout optimal DR solutions at every bus in cases 3 and 4 are shown in Figure 5. Our method can identify that the projected model can attain superior load reductions, mostly at heavy load buses such as bus 15 or bus 18. Thus, our model can effectively defer network expansion and improve the efficiency of the network.
Total cost of TEP for cases 3 and 4.
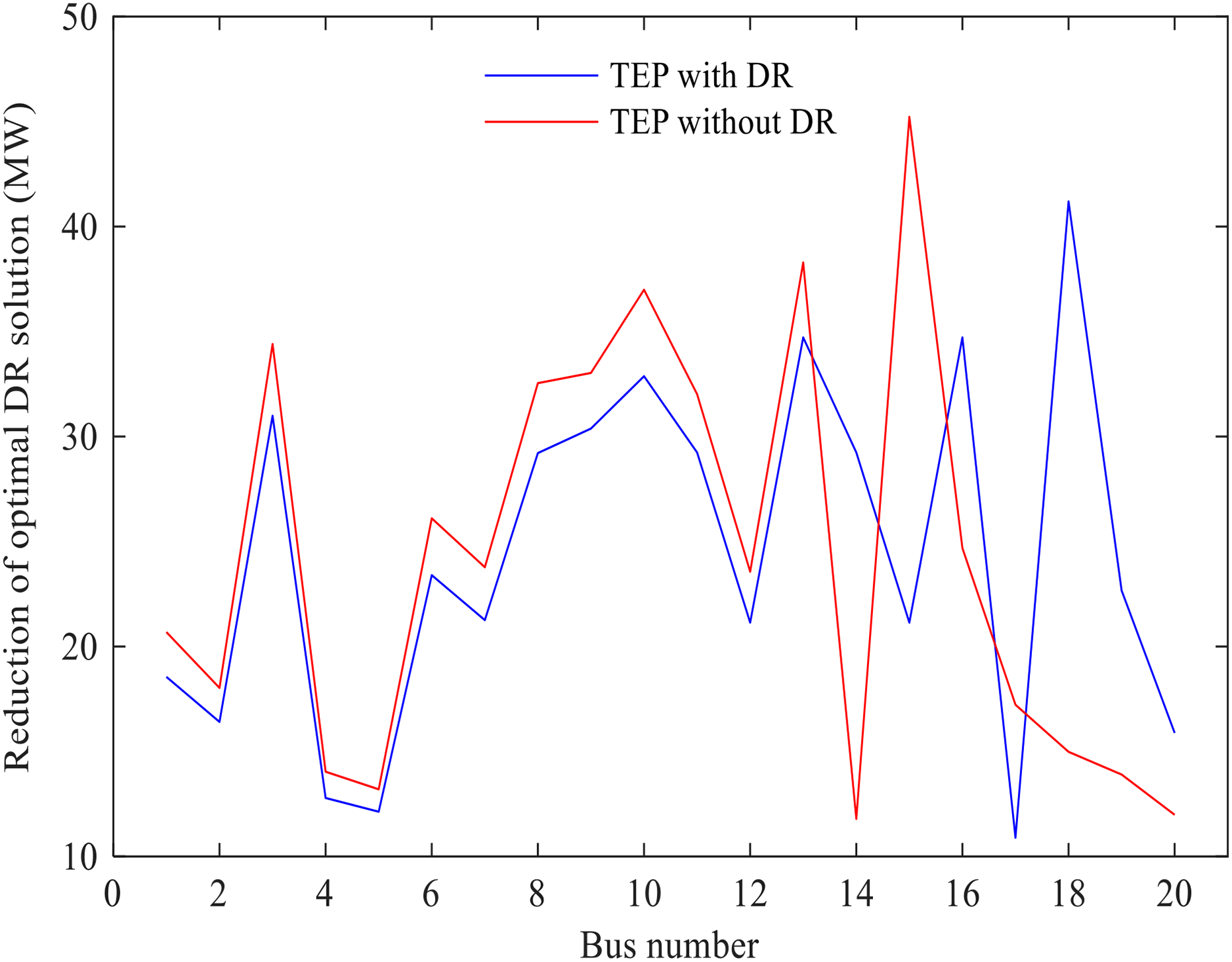
Load reduction through DR at each bus for cases 3 and 4 using CGOA. CGOA: chaotic grasshopper optimization algorithm; DR: demand response.
Conclusions
This article examines how the GTEP investment plan is modified while taking into consideration the incorporation of SGT in the planning horizon. The most optimal investment planning and decision-making can be executed via the organizer with respect to lowering cost, reaching emission goals and being subjected to additional constraints, in which the motivation behind innovation choices is practical. CGOA is established and utilized to obtain the most optimal possible solution for the GTEP model. The statistical consequences delineate how to pick generation and transmission technologies while exploring low emission and cost plans. Relating to the demonstrated outcomes, our model can considerably lower the total cost. Additionally, the proposed model can offer system operators and network organizers with reports favorable to the variability of hazards in planning and in finding the most proficient method to utilize DR assets to support system goals.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.