
Abstract
Drones are commonly used for civil applications and are accessible to those with limited piloting skills in several scenarios. However, the deployment of a fleet in the context of scientific research can lead to complex situations that require an important preparation in terms of logistics, permission to fly from authorities, and coordination during the flights. This paper is a field report of the flight campaign held at the Barbados Island as part of the NEPHELAE project. The main objectives were to fly into trade wind cumulus clouds to understand the microphysical processes involved in their evolution, as well as to provide a proof of concept of sensor-based adaptive navigation patterns to optimize the data collection. After introducing the flight strategy and context of operation, the main challenges and the solutions to address them will be presented, to conclude with the evaluation of some technical evolution developed from these experiments.
Introduction
Drones are commonly used for many civil applications and the procedures to operate them have evolved during the past decade to make them accessible to those with limited piloting skills in myriad scenarios. However, the deployment of a fleet in the context of scientific research can lead to complex situations that require an important preparation in terms of logistics, permit to fly from authorities and coordination during the flights. This paper is a field report of the flight campaign held end of January 2020 at the Barbados Island as part of the NEPHELAE project.
The context and main goal of the project are detailed in the next section. After presenting some of the preparation and logistic constraints, the overall flight strategy, its challenges and the solutions to address them will be presented. To conclude a summary of the flights will be provided with the evaluation of some technical evolution developed from these experiments.
Context
The purpose of the NEPHELAE project is to develop and deploy a fleet of autonomous drones to collect data within and around cumulus clouds. The final objective for the atmospheric scientists at the Centre National de Recherches Mètèrologiques (CNRM) that are leading the project is to better understand the mixing processes during the evolution of these clouds. The main region of interest for these observations is the border of the cloud that needs to be sampled at the frontier between the open air and the water-saturated region. Several publications have already described the flight patterns specifically designed for this task1,2 and showed the advantage of these strategies in cloud exploration in a simulated cumulus field.3,4
As a summary, the general idea is to use the real-time data from the on-board sensors to decide whether or not the plane is inside the cloud or not. Based on this decision and the general flight strategy (border exploration, border+center exploration, …) a sequence of arcs and straight lines is performed. Figure 1 presents the area of interest and some of the possible flight patterns.

Cloud interest zones (illustration and design by Sarah Gluschitz).
The key element of this project is the operation of several drones at the same time with several objectives: increase the spatial and temporal sampling resolution by deploying a network of sensors, extend the observational footprint of the in-situ observations using advanced mapping techniques, and perform synchronized measurements of the same volume at different locations to estimate the transport of water and heat inside and surrounding the cloud.
Finding the right location to carry out the flights is already a challenge. The target clouds are trade wind cumuli, which means that the flights will be over the sea and in the tropics. The prevailing winds average 8 m/s and it is required to follow the same cloud as long as possible (the life-time of a cloud is around 20 to 30 minutes), it means that the flight area has to be large enough, and the flight ceiling at least 1500 to 2000 meters above sea level (ASL). Several places have been considered, and visited by a team member prior to the mission, depending of their weather, accessibility, local regulation, etc.
We finally had the opportunity to participate to an international flight campaign, called EUREC4A,5,6 at the beginning of 2020 on the island of Barbados. This campaign already involved boats, piloted planes and two other types of drones. It is important to note that UAV flights are strictly forbidden by Barbados authorities, except where specifically allowed in the context of this scientific mission, as long as the drones have permit to fly from authorities from their own country. Since the selected location for drones was the same for all teams, the airspace had to be shared.
The next sections details the flight operation and the required preparation and logistics for a long mission abroad.
Preparation and logistics
The selection of the flight location was complex as several factors had to be considered. The first constraint was to be located on the east coast as the prevailing wind is blowing west from the ocean and the goal is to catch the clouds before they reach the island. The international airport is located at the south end of the island, which means that our flight area should be north to avoid conflicts with the planes during their initial climb. Finally, for fixed-wing operations the field should be flat, far enough from populated area and void of surrounding obstacles. None of the three possible spots perfectly matched all the criteria, but the one called Morgan Lewis (see Figure 2) was the best option with a long field well-oriented toward the sea and with few obstacles, except for hills on the side and a downward slope that made the automatic landing impossible. The landings were finally all performed by the safety pilot.

Map of Barbados Island with flight location at Morgan Lewis, Barbados Cloud Observatory (BCO) and Bridgetown Airport (BGI).
A total of 10 people (researchers, engineers, PhD students) took part of the mission for a duration between 1 week to almost 4 weeks. The planes, ground equipment and computers, scientific sensors and batteries were sent two months in advance by ship. Containers served as the base station for operation and storage as seen in the Figure 3.

View of the temporary operation center and storage.
Flight operation strategy
The flight operation strategy has been defined during the preparation time before the mission to take into account the needs and the maturity of the technology being deployed. The details of the overall software architecture and the algorithms can be found in 1 . As a summary, during a typical flight five operators were working together each with a specific role:
- The atmospheric scientist is monitoring the real time sensor values collected by the UAVs. When he estimates that a UAV is crossing a cloud worth sampling, he requests to deploy a specific pattern to the mapmaker operator. He is also in charge of the regional weather forecast and near real-time satellite images to determine if clouds are coming within the next hour. - The mapmaker operator is checking the real-time mapping process based on Gaussian Process Regression. Once he receives new instruction from the atmospheric scientist, he creates a new mission element with the desired parameters. - The UAV operator is controlling the flights from the Ground Control Station (GCS). In particular, he is in charge of take-off, landing and waiting procedures, as well as the general safety of the flights. - The flight director is the coordinator of the three other operators. He is checking the created mission and will decide if they should be accepted or rejected. He is also in charge of the coordination with the other teams sharing the airspace and is the point of contact for the local Air Traffic Control. - The safety pilot is outside with the remote control and is handling the planes. He can take back the control when flying in line-of-sight and is piloting for the very last part of the landing.
Figure 4 shows the operation center with a display for the atmospheric scientist to confirm cloud detection (left), the operator in charge of the real-time mapping system (center), and the UAV operator (right). The safety pilot remained outside during take-off and landing operation, and the flight director stands behind the other operators to have a global view of the flight operations.

Operation center with from the left: atmospheric data and mapping display, map operator and UAV operator.
The role of the safety pilot is always to guarantee the safety of the operations during critical phases (take-off and landing, flight near populated area, …). When dealing with several aircraft, the problem is even more complex. The pre-campaign configuration of the Paparazzi UAV is that each drone has a dedicated pilot and remote control receiver (RC). However, considering the initial goal of the project to have up to 4 or 5 UAVs at the same time, it was not a viable option as the number of qualified safety pilots would not have been sufficient. In addition, previous experiences have shown that the risk of mixing the RC transmitters is real and has lead to catastrophic situations. The solution that has been selected for this project was to use a single safety pilot with only one controller. All planes were bonded to the same RC and a special software tool was developed for the UAV operator to select which plane is being controlled at a particular time. This does not go without risks – if a plane is selected in the wrong mode, it might enter to a safety mode and go back home. To reduce this risk, the RC selector was also checking the status of the autopilot (flight and RC mode) to decide if the selection of a particular UAV is valid or not.
Deployment and practical constraints
Airframe and ground equipment
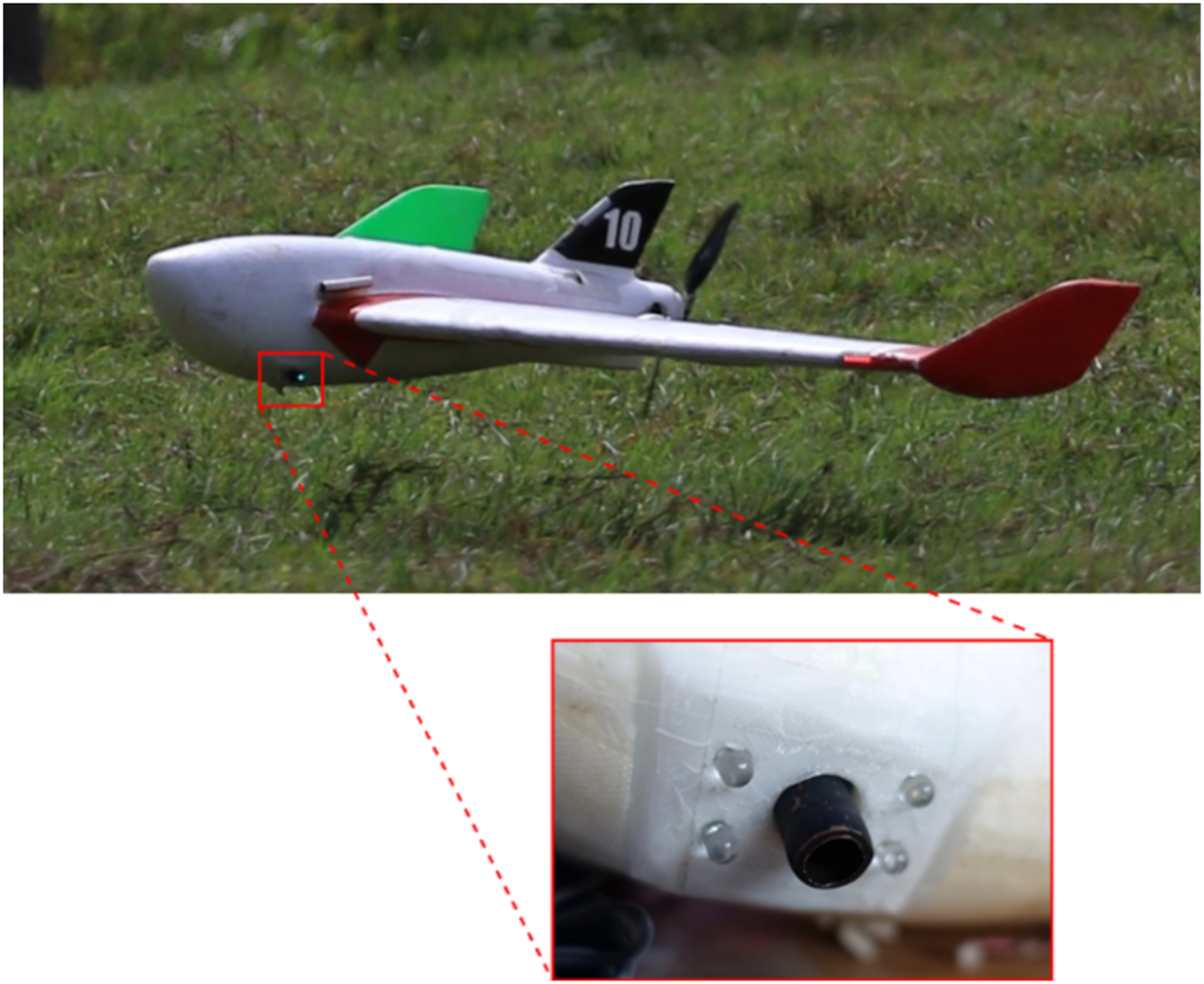
The requirements for the plane to be used for the NEPHELAE project were particularly hard to meet. A prototype of custom aircraft had been designed, 7 conforming to the requirements in terms of flight performances (flight speed and time, altitude and range, payload capacity). However, the result of the high-performance design was a UAV that was too fragile and complex to operate in a scientific field experiment, without proper facilities for maintenance and repairs. The decision was finally made to used commercial foam airframe, called X6, modified to integrate the scientific payload as seen in Figure 5. They have been used in previous missions8,9,10 and proven to be robust and easy to repair.
The main impact was a limited flight time of 1 hour (plus 10 minutes for margins) instead of more than 2 hours for the custom design.
The post-campaign analysis and further flight testing have shown that it was a good decision to give the priority to the robustness of the aircraft as the repeated landings and occasional mishaps would have put the 3D-printed high-performance planes beyond repair. The flight time was indeed a limitation but was still compatible with the allowed airspace dimensions. A better integration of the batteries, sensors, flight controller, optimized flight performance (cruise airspeed, climb rates, etc,) would have allowed to increase this flight time to 1.5 hours. In addition, a cloud-targeting system would also reduce the time required to intercept a cloud – allowing more time for the scientific part of the mission.
In total, 4 planes were available, but only 3 flew, with at most 2 planes at the same time. This was much less than the initial plan, involving up to 4 or 5 planes. Several reasons can be found. One was that the time to operate the drones on the ground, with a bungee launch is quite long, as well as the time to reach the altitude and position to start tracking the clouds. Using more than 2 planes would have resulted in a very short time of effective simultaneous cloud exploration. One of the main issues was that the automatic, or at least assisted, task allocation algorithm had not been sufficiently developed prior to the experiment in Barbados. Priority had been given to the real-time cartography and adaptive flight patterns. As a result, the burden for conflict avoidance and synchronization was left on the shoulder of the UAV operator, in addition to the usual flight parameter monitoring. Conducting the ensemble of the missions requires training and experienced UAV operators in conjunction with a safety pilot, especially for the take-off and landing phases of the mission.
Concerning communications, the 2.4 GHz long range modems P2400 from Microhard have been tested and proven themselves to be reliable, with a constant data flow up to 14 km from the base station (equipped with a directed antenna and set to the maximum power).
Flight plan
The flight space has been organized as shown in Figure 6. The red trapezoidal zone is the allowed flight area, defined with the Barbadian Civil Aviation Authorities. This flight zone is trapezoidal to account for variability in the prevailing wind, and also inhibits the UAV from exiting the flight zone in case of a Return to HOME procedure. The flight ceiling was limited to 1000 m ASL because our airspace was below the approach zone for the international airport (BGI). On several occasions, a 2000 m ASL ceiling was requested on a per-use basis and only in the afternoon. The maximum allowed distance from the GCS (pink arc) is 15 km.

Flight zones: limit of the allowed area (red), normal operation area (green), shared airspace with another team (orange).
The Green area (Figure 6) is the normal operation area inside which adaptive navigation patterns were used based on the ground operator’s instructions. If a plane deviated from this area while tracking a cloud, it was automatically assigned to a standby safe position close to the sea shore. Finally, the orange rectangle represents the flight airspace used by a team from the University of Colorado to fly a small drone below the cloud base. 11
Since we are flying inside clouds, therefore above cloud base, it is possible to fly together, but with great care. In general, this space was avoided when the two teams were operating simultaneously. Another large drone (4 m wing span, 25 kg; BOREAL SAS, Toulouse, France) was operated from the same field for long distance missions. All operations with light drones where forbidden during takeoff and landing of this drone.
Figure 7 presents the steps in a typical flight:
Step E1 Take off, initial climb and waiting on a circle. Step E2 Go to a climb point above the sea and reach the final altitude, defined by the altitude of cloud base and the objectives of the flight. Cloud base had been determined prior to the mission using real-time observations from remote sensing instruments at the Barbados Cloud Observatory (BCO). Flight altitudes were at least 100 m above cloud base. Step E3 Reaching the eastern end of the flight zone at final altitude. During this time, the cloud sensor offset is computed from background noise outside of clouds. When reaching the search zone, the planes are performing hippodromes (10 to 14 km from the GCS) perpendicular to the prevailing wind until a cloud is detected or mission is aborted. Step E4 When a cloud is detected, the adaptive flight patterns are activated to track the cloud and achieve the required measurements. Step EF The final step is the descent to waiting circle and landing under the supervision of the safety pilot.
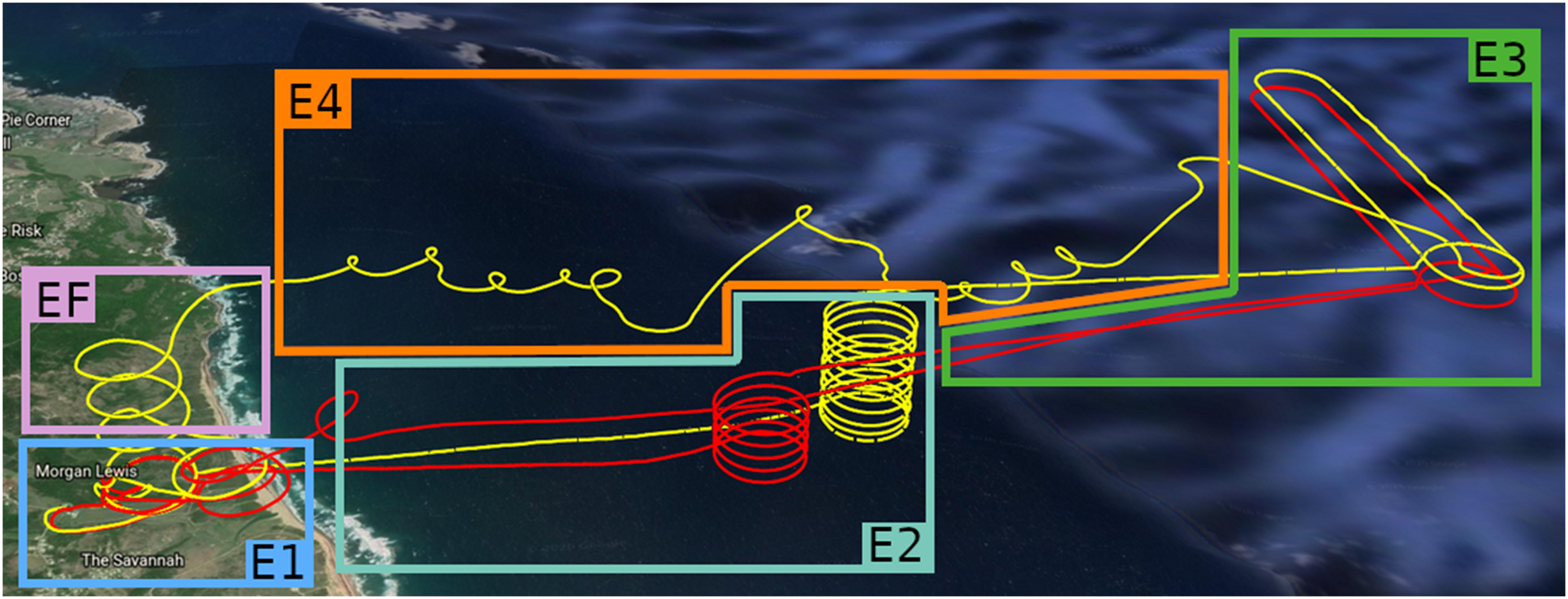
The different steps during a typical mission.
In this example (Figure 7), two planes have been deployed at the same time, at two different altitudes (50 meters of vertical separation). Only the yellow plane was able to catch and track a cloud. The second plane was too far to join the first one and went back home directly. While only one UAV tracked the cloud during this mission, there were two missions during which both UAVs tracked the same cloud simultaneously.
Improvements and corrections
Despite several preparation flights before the actual campaign, it was not possible to anticipate all the possible issues. Ideally, the entire system including the sensors, adaptive sampling strategies and mapping software would have been tested in marine clouds near the coast of France prior to deployment in Barbados; however, delays in the fabrication and instrumentation of the UAVs, as well as necessary changes in the adaptive sampling strategy and difficulties in securing an authorized airspace rendered a complete demonstration of the system prior to the experiment impossible. Consequently, several modifications to the setup in the field were needed to improve the safety and efficiency of the flight.
One of the unforeseen issues to solve concerned the real-time interpretation of the data from the cloud sensor. While the cloud sensor had been used in prior field experiments, 8 it had not been possible to test the sensor in conjunction with the adaptive sampling strategy prior to the experiment in Barbados. For example, the signal is sensitive to the input voltage, which also varied with the throttle commanded by the autopilot – the inline voltage regulators were insufficient for this application of the cloud sensor and hardware modifications were not technically possible. During the turns, the autopilot increased the throttle to maintain the prescribed altitude and created artificial peaks in the cloud sensor. It was anticipated that both a hysteresis filter and low-pass filter would be needed to correctly detect the cloud edge. However, the correlation with motor power consumption made the sensor more challenging to use during the adaptive sampling phase of the mission. Correction factors proportional to the battery voltage have then been added during the mission. Several calibration flights were needed to achieve a proper calibration, delaying the schedule for scientific operations.
Another issue not previously anticipated was the location of the cloud sensor, which initially pointed horizontally out the side of the fuselage. During previous experiments, anomalies related to direct sunlight on the cloud sensor could easily be removed in post-processing. However, during the flight campaign in Barbados, direct sunlight on the cloud sensor also interfered with the adaptive sampling. Fortunately, the foam structure allowed to move the sensor to look 45 degrees down as seen in Figure 5 and no further issues were reported.
In addition, several flights have been interrupted or even resulted in a mishap due to bad GPS reception. To mitigate this issue, the GPS receiver was moved outside of the fuselage on an metallic sheet connected to the battery ground wire. Tape was used to protect the electronic from humidity and water droplets while sampling inside the clouds.
Finally, the transition from the open ocean to the hilly terrain generated turbulent structures that caused the UAVs to stall during landing procedures. After around a dozen flights, we settled on a landing corridor that seems to generate less turbulence and increased the airspeed to penetrate the areas that were turbulent. The safety pilots also initiated the landing procedures prior to turning for the final approach.
Summary and improvements for future operations
Flights summary
Table 1 presents a summary of the flights during the Barbados campaign. Each ‘flight‘ refers to a complete operation involving one or more drones at the same time. The only attempt to fly with three drones was aborted due to the unsafe behaviour of one of the planes.
Summary table of the flights during the experimental Barbados flight campaign.

The first remark is that the number of calibration/validation flights comprised nearly half of the total number of flights. As stated previously, complete testing of the system including the sensors, adaptive sampling strategies and mapping software in real clouds could not be done before the experiment, and a number of issues had to be addressed once operations began in the field.
The second point is that only 18 flights were able to track a cloud for more than 5 minutes. As there were no dedicated cloud targeting systems implemented during this campaign, the UAVs orbited in a hippodrome pattern perpendicular to the prevailing wind up to 10 km from the GCS until intercepting a cloud by chance and start the tracking. Fortunately, the altitude of cloud base was well identified using remote sensing information from BCO. Nonetheless, a special device, called AllSky, with two cameras a few hundreds of meters apart could have provided the initial position of the clouds 12 allowing multiple UAVs to immediately intercept the cloud and start the scientific mission.
Some flights have also aborted after loosing the track of the cloud as the environment is very dynamic at the border of the cloud. When trying to turn back inside the cloud, if the shape is too different from the previous turn, the plane may continue on its circle without reentering the cloud again.
Out of the 18 usable flights, 6 were used to process meaningful data to build diagrams about the exchange of heat and water between the cloud and the surrounding atmosphere. This includes a flight with 2 drones tracking the same cloud with the adaptive patterns designed for the project. Given that cloud cover is usually less than 10 percent, the fact that we could track any clouds at all is quite an accomplishment.
Lessons learned and possible improvements
The NEPHELAE flight campaign was ultimately a success as we managed to deploy several drones, with novel adaptive flight patterns to autonomously track clouds for the first time and gather scientific data, which are being exploited to improve the understanding of entrainment mixing and cloud evolution. However, several points could be improved and lessons learned form the difficulties faced during the project.
The first one is that the robustness of the plane and the possibility to repair in the field is extremely important, even more than adhering to flight performance objectives. In the case of optimizing the airframe design for NEPHELAE, accounting for desirable conditions in term of flight time, airspeed and payload capacity, led to an interesting prototype, but unable to operate in field campaign conditions. An other aspect of the robustness is the quality of the electronic boards integration, both for payload and autopilot, which is particularly important when conducting a field experiment where the salt from the sea spray corrodes electrical components. The malfunctions with the GPS receivers and some issues with the cloud sensor were related to insufficient voltage regulation, corrosion or damaged cabling.
The second issue to mention is the robustness of the autonomous navigation patterns, which should be able to recover and continue the adaptive sampling after losing track of a cloud. This issue has been addressed after the campaign and validated with hybrid flights (real planes flying in simulated clouds) at the Centre de Recherches Atmosphèriques (Lannemezan, France). After running the planes in different scenarios, they were able to relocate the border and continue the exploration.
In one occasion, the use of the RC switching mechanism to fly multiple aircraft from the same transmitter almost led to a mishap, because the UAV operator selected a plane already flying in autonomous navigation while the safety pilot RC was on manual position. Fortunately, the plane was in line-of-sight of the safety pilot who managed to stabilize the flight before switching the UAV back to autonomous flight. Since the GCS tool for plane selection does not have direct feedback from the RC (except through the status of the plane), the only way to prevent a repeat of this situation is by ensuring proper dialog between the UAV operator and safety pilot to assess the currently selected mode on the RC before switching.
As discussed earlier, a dedicated cloud targeting system would have reduced the time needed to intercept the clouds and begin the scientific part of the mission. An integrated cloud targeting would guide the UAVs automatically and could have been accomplished with onboard cameras or by deploying a ground-based system such as the AllSky system.
Finally, the last point that needs improvement is the automatic task allocation in order to deploy a larger fleet. The workload on the different operators is already high and several tasks should be automated. This includes improvements to take-off procedures, assistance for collision avoidance and the possibility to assign high level goals to the fleet, leading to less manipulation by the UAV operator and safety pilot.
Conclusion
Within the NEPHELAE project, an atmospheric science driven study, a dedicated architecture has been developed to operated multiple drones during an international field campaign to follow the evolution of clouds. In addition to the usual technical challenges to fly beyond visual line-of-sight up to 14 km from the GCS and at relatively high altitude, many operational constraints had to be addressed. The overall campaign was a success considering the number of flights, and the value of scientific results that have been extracted from them. Nonetheless, several difficulties were encountered during the mission and the lessons learned will be considered for future projects. Notably, some key elements of the original architecture could not be developed in time, particularly, task planning and a cloud targeting system, which are the main focus of future work. Preliminary scientific results can be found in 4 .
Footnotes
Acknowledgements
Observation data were collected at the Pyrenean Platform for Observation of the Atmosphere P2OA (![]() ). The authors also acknowledge the Centre de Recherches Atmosphèriques (CRA) for their assistance and allowing access to their facilities and meteorological data for the flight tests during the NEPHELAE project.
). The authors also acknowledge the Centre de Recherches Atmosphèriques (CRA) for their assistance and allowing access to their facilities and meteorological data for the flight tests during the NEPHELAE project.
Funding
This research was supported by Agence Nationale de la Recherche (Project-ANR-17-CE01-0003), Aerospace Valley, Mètèo-France and Règion Occitanie. P2OA facilities and staff are funded and supported by the University Paul Sabatier, Toulouse, France, and CNRS (Centre National de la Rechercher Scientifique).