
Abstract
Micro air vehicles with transitioning flight capabilities, or simply hybrid micro air vehicles, combine the beneficial features of fixed-wing configurations, in terms of endurance, with vertical take-off and landing capabilities of rotorcrafts to perform five different flight phases during typical missions, such as vertical takeoff, transitioning flight, forward flight, hovering and vertical landing. This promising micro air vehicle class has a wider flight envelope than conventional micro air vehicles, which implies new challenges for both control community and aerodynamic designers. One of the major challenges of hybrid micro air vehicles is the fast variation of aerodynamic forces and moments during the transition flight phase which is difficult to model accurately. To overcome this problem, we propose a flight control architecture that estimates and counteracts in real-time these fast dynamics with an intelligent feedback controller. The proposed flight controller is designed to stabilize the hybrid micro air vehicle attitude as well as its velocity and position during all flight phases. By using model-free control algorithms, the proposed flight control architecture bypasses the need for a precise hybrid micro air vehicle model that is costly and time consuming to obtain. A comprehensive set of flight simulations covering the entire flight envelope of tailsitter micro air vehicles is presented. Finally, real-world flight tests were conducted to compare the model-free control performance to that of the Incremental Nonlinear Dynamic Inversion controller, which has been applied to a variety of aircraft providing effective flight performances.
Keywords
Introduction
Micro air vehicles (MAVs) with transitioning flight capabilities, or simply hybrid MAVs, operate over a wide flight envelope including different flight phases, such as vertical take-off, efficient forward flight, transitioning flights, hovering and vertical landing, see Figure 1. While this complete flight envelope enlarges the application range of MAVs, new aerodynamics optimization approaches must be developed to improve the MAV flight performance, considering the aerodynamics challenges of each flight domain. Furthermore, the autopilot system must ensure the stability and the tracking of trajectories for all these flight domains which results in a higher degree of challenge and complexity also for the guidance, navigation, and control community. Different hybrid MAV configurations such as tilt-rotors 1 or tilt-wings, 2 quadplanes, 3 and tilt-body or tailsitter 4 can be found in literature. These platforms have been designed in order to solve the aerodynamics and mechanical limitations of each of them, and the choice of the appropriated MAV configuration varies according to the imposed flight mission specifications, e.g., maximum payload, the desired endurance and range, etc. Generally, hybrid MAVs are designed and optimized to perform an efficient forward flight, since this flight phase represents most of its mission. Various studies have improved and assessed the aerodynamic properties of hybrid MAVs previously.5,6 A critical point is the design of flap effectiveness which needs to be optimized in order to create sufficient pitch moment ensuring the control authority during transitioning flights. We focus this research project in the design and control of tailsitter MAVs, and we investigate the performance of this peculiar MAV class for three reasons: (1) Tailsitters have a better endurance in forward flight when compared to other configurations of hybrid MAVs; (2) The simple transition mechanism of tailsitters facilitates the control design for its entire flight envelope, unlike to tilt-rotors that need additional actuators to orient the propeller in order to perform transitioning flights; (3) The design of controllers requiring little prior knowledge of the dynamics of tailsitter MAVs remains an attractive, motivating and challenging topic that needs to be answered by the control community. Typically, the entire flight envelope of tailsitter MAVs can be analyzed in three distinct flight modes, namely, hovering flight, forward flight and transitioning flight. The stabilization of hovering and forward flights can be achieved using linearized models around an equilibrium point facilitating the implementation of classical linear control algorithms. On the other hand, transitioning flights present some peculiarities that include fast changing of aerodynamic forces and moments with wing behaviors partially stalled. Based on such aerodynamic effects, the identification of a reliable model that accurately represents the nonlinear dynamics of a tailsitter MAV over its entire flight envelope remains an expensive, a time consuming and a difficult task. Because of these practical problems related to the characterization of a model for the design of model-based controllers, some research works considered the transition flight as an undesirable and transient flight phase. However, transitioning flights need to be continuously stabilized in order to ensure a smooth and safe flight, especially for flying missions in windy environments. Hybrid MAVs are often considered by the control community as a parameter varying system, e.g. the change of aerodynamic coefficients according to the hybrid MAV attitude orientation and the environmental wind conditions. Consequently, designing a control technique for autopilot systems that does not rely on prior knowledge of the hybrid MAV model becomes an intuitive, innovative and, from the point of view of the authors, an appropriate control methodology. Therefore, the development of such a controller that estimates the hybrid MAV dynamics and counteracts it, in real time, can be easily adaptable and implemented for different hybrid MAVs.

Typical flight phases of micro air vehicles with transitioning flight capabilities: 1 – Vertical take-off; 2 – Transition; 3 – Forward flight; 4 – Hover flight; 5 – Vertical landing. The vector
Literature review
Different control strategies have been designed for hybrid MAVs; we present some of them in the following with particular emphasis in the controllers developed for the tailsitter class. For practical reasons, classical linear controllers designed using PID techniques have been applied in the control of hybrid MAVs.7–11 Although simple to tune without the knowledge of the controlled system, PID controllers have insufficient robustness properties against wind disturbances. Autopilot systems designed from optimal control theory, have been researched.12,13 For instance, the linear quadratic regulator which was designed and applied for a tailsitter MAV previously modeled and identified from wind tunnel campaign. 14 However, the performance of model-based controllers may differ primarily in the fidelity with which the plant is modeled and the accuracy of the identified model parameters. Hence, classical model-based control techniques seem to be neither optimal for hybrid MAVs nor easily transposable for a new platform. Gain scheduling methods employing different control algorithms with both linear 15 and nonlinear approaches, 16 have been developed to stabilize hybrid MAVs at different pitch angle orientations within the transitioning flight. Gain scheduling techniques allow easy understanding and simple implementation of the control gains that cover the entire flight envelope of hybrid MAVs. However, the principal disadvantage of this control method, found in literature, 17 is the expensive computational cost for operations in real time. In the same way, an attitude controller based on optimal control algorithms was proposed by Ritz and Andrea, 18 different control solutions for a set of attitude errors were precomputed and stored in a lookup table. According to the current flight conditions and for each autopilot system update, the desired control gains are obtained by reading their predefined values in the table. Further analysis is needed to determine if this proposed control strategy can be effective and easily adaptable for different hybrid MAVs. Adaptive control techniques which account for uncertainties present in the hybrid MAV model were developed by some authors.19,20 However, instability problems with adaptive control methods can still exist with regard to unmodeled dynamics or inaccurate models used in the adaptation criterion of controller’s gains. Different research topics applying nonlinear control techniques on hybrid MAVs, such as backstepping,19,21,22 NDI20,23,24 and INDI, 25 appears to be positively researched in literature. The INDI approach, which is a control that depends less on the model, was experimentally flight tested providing excellent performance against wind disturbances. This controller requires the identification of the system actuator behavior in order to estimate its control effectiveness. As the actuator’s effectiveness varies according to the flight phase, e.g. hovering or forward flight, a gain scheduling method was implemented to fit the actuator effectiveness under the respective flight domain. Some theoretical research has analyzed the performance of nonlinear feedback control on axisymmetric aerial vehicles 26 proposing an extended control solution to a larger set of generic aerodynamic models 27 which could include hybrid MAVs. Additionally, a variety of nonlinear control strategies based on Lyapunov’s stability concepts have been designed to hybrid MAVs.4,28
Links with the model-free control algorithm
The literature presents some particular control algorithms that do not rely on modeling. For instance, the model-free control (MFC) approach proposed by Fliess and Join 29 has been successfully illustrated in different concrete case-studies varying from wastewater denitrification, 30 nanopositioning of piezoelectric systems 31 up to inflammation resolution in biomedical applications, 32 see also its references for additional case-study examples and supplementary information. Some research works based on MFC techniques have led to patents, such as Join et al. 33 and Abouaïssa et al. 34 This control approach has been applied in the aerospace field35,36 and, except for our previous work, it has never been applied on hybrid MAVs which is an additional motivation for the development of our research project. The advantage of the control methodology proposed in this paper is the capability to estimate the hybrid MAV dynamics, without a prior knowledge of its parameters, only from its output and input-control signal measurements. Thus, the disturbances that may affect flight performances are measured and the MFC algorithms are able to estimate as well as counteract the undesirable dynamics in order to continuously stabilize the hybrid MAV for arbitrary attitude orientations covering its entire flight envelope.
Present work
The main contribution of our current work is to develop a fully autonomous MAV with transitioning flight capabilities that performs a given mission accurately. Depending upon the mission complexity and its requirements, the MAV should fly at low and high air speeds, respectively corresponding to hovering and forward flight phase. Based on these mission requirements, and the modeling issue presented in the previous section involving this particular MAV class, we present a part of our previous work that deals with:
comparison between a model-based controller and our MFC architecture during the transition flight in a disturbed environment;
37
uncertain parameter analysis of fixed-wing MAVs in forward flight;
38
full MFC architecture for position tracking, velocity control and attitude stabilization of a hybrid MAV during its entire flight envelope;
39
Our intention is to analyze our control architecture through additional flight simulations and real-world flight tests in order to investigate its operational behavior, its limits and the interaction between each MFC control block. The new contributions of this paper, with respect to our previous works, are:
initial condition analysis during hovering and transitioning flight phases in order to empirically determine a safe and stable boundary for distinguished initial conditions of attitudes and velocities; control performance analysis in the frequency domain during hovering and forward flights; study of MFC’s adaptive properties for parametric variation illustrations during the forward-to-hover transition through flight simulations; real-world flight tests to compare the MFC attitude stabilization performance to that of the INDI controller in indoor flight conditions;
The paper is organised as follows: in the next section, we present the manufacturing process and the particular aerodynamics of the hybrid MAV prototype named DarkO. Then, we describe the hybrid MAV behavior from a mathematical formulation based on equations of motion. This is followed by a section in which the control strategy is detailed as well as the proposed control architecture. Flight simulations are presented then and real-world flight tests follow. Finally, the reader can find the conclusion and the future work.
Hybrid MAV prototype
Throughout the whole study, we have used the DarkO vehicle which is a tailsitter configuration consisting of two motors, positioned in front of the wing, and two exceptionally large double-flapped control surfaces. Mission definition of DarkO has been mainly optimized for forward flight with the capability of taking off and landing vertically. Therefore, it has not been particularly designed for hovering for long duration.
Manufacturing
The DarkO’s frame is completely manufactured by the 3D printing method using Onyx material. Figure 2 shows the printed pieces that are assembled in order to build the whole frame. The shell structure for the wing and the fuselage halves are manufactured as

Printed parts of DarkO out of Onyx material.
Control surface design
A particular feature that is required by the tailsitter configuration is to generate excessive amount of pitching moment in order to transition mainly from forward flight phase to hovering flight phase. Therefore, DarkO frame’s control surfaces have been designed as double-flap which has a passive mechanical constant ratio. Traditionally, multi-section flaps have been designed for lift enhancement; however, in our case the design objective is to generate as much positive pitching moment as possible without having a massive flow separation on the bottom surface of the airfoil. The advantage of using double-flap (δII) control surface with respect to using a single-flap (δI) control surface has been shown in Figure 3. Variation of the sectional lift Cl, drag Cd, and moment coefficients Cm at different flap deflection angles have been compared for the two different flap configurations. The analysis has been done by using the open-source program XFOIL. 40 Reynolds number used during the analysis corresponds to the slipstream velocity seen by the blown portion of wing and is approximately 150k. The DarkO’s motor mounts have an incidence angle of –6 degrees on DarkO’s wings; therefore, the airfoil has been set to an angle of attack of + 6 degrees and then the flap angle has been varied between –2 and –14 degrees (negative flap angle being upward). Particular attention should be given to the pitching moment Cm in the figure. We notice that double-flap (δII) control surface can generate almost two times the pitching moment generated by the single-flap (δI) control surface. As a side effect, the double-flap control surface also works efficiently for lift generation; however, as we are trying to increase the pitching moment (in positive direction), the lift generation happens in negative direction. The vehicle requires the excessive amount of pitching moment only during transition phase, and the duration of this maneuver is very short; therefore, lift reduction caused while increasing the pitching moment has not been taken as an issue.

Variation of the sectional lift Cl, drag Cd, and moment coefficients Cm with respect to flap angles for different flap configurations: double-flap (δII) control surface and a single-flap (δI) control surface
Simplified tailsitter MAV model
This section is divided into two parts. First, we present the mathematical formulation of aerodynamic forces and moments, and the aerodynamic assumptions used in the hybrid MAV model. Then, the equations of motion, based on Newton’s second law, are introduced to describe the hybrid MAV behavior. The obtained hybrid MAV dynamics are used to establish a flight simulator in order to analyze the proposed control approach before real-world flight tests.
Formulation of aerodynamic forces and moments
We present an analytic continuous singularity-free formulation of aerodynamic forces



The vector


The








Finally, the flap deflections are modeled as varying cambered airfoils and the aerodynamic forces and moments created by these deflections are approximated by the following equations




Equations of motion
The hybrid MAV model is divided into four rigid bodies (two propellers and two wings composing the fuselage) with constant mass (m), represented by 10 states
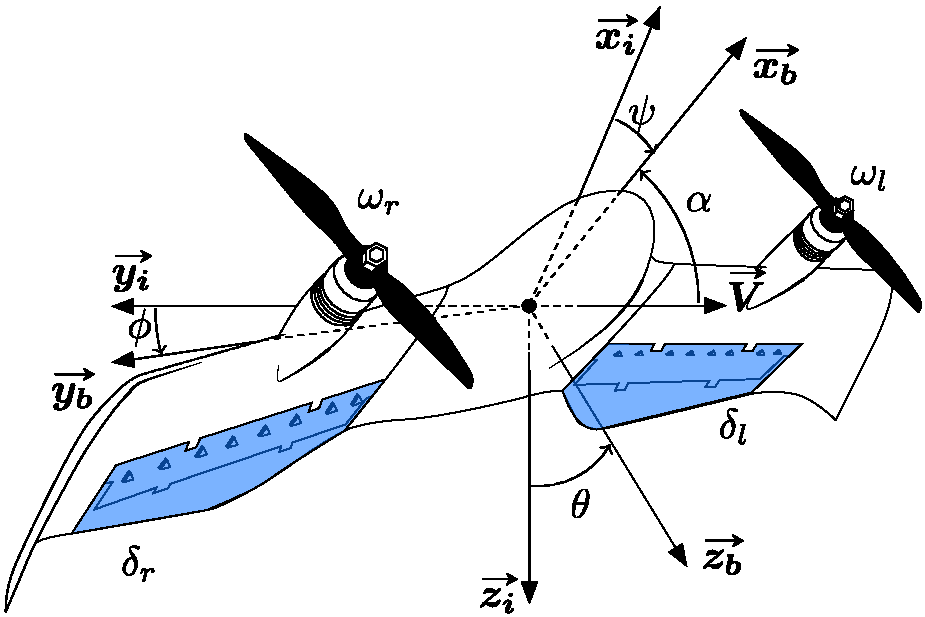
Illustration of the used coordinate frames, angles and actuators. The inertial coordinate frame is represented by
In order to compute the forces and moments caused by the wing–propeller interaction, we define two segments. Each segment is composed of one wing j and one propeller k. Thus, the sum of aerodynamic forces acting on the wing j with the thrust


The vector




The gravitational acceleration vector is equals to
Control strategy
The proposed control strategy is based on MFC algorithms with no information about the tailsitter MAV parameters (e.g. mass, inertia, aerodynamics coefficients, etc.). This controller can be implemented on multiple-input multiple-output systems by assuming an approximate decoupling between the dynamics of the controlled system. This major assumption has been verified by different practical experiments. 43 Therefore, for simplicity reasons, we present the MFC algorithms for single-input single-output systems. We use a prior knowledge of sign-convention between control-input influence in the MAV states based on simple flight mechanics equations to develop the correct block interactions in the proposed control architecture. In terms of tuning model-based control approaches, the model given in the previous section is only used to simulate the tailsitter MAV dynamics and not for control design.
MFC principles
As introduced by Fliess and Join,
29
an unknown finite-dimensional system with a single control-input (u) and a single output (y) can be described by the following input/output relation in a differential equation formulation



In equation (24), v is the order of the derivative of ym,

The first step to obtain an estimation of the system dynamics, is to apply the Laplace Transform in equation (25), considering Fy as a constant piece-wise function. According to elementary operational calculus we transform equations (25) to (26)


However, the variable s in the time domain corresponds to a derivative term with respect to time, which is sensitive to noise corruptions and could amplify the noise measurement in the output of

Equation (28) can be transferred back to the time domain employing elementary calculus and Cauchy’s formula to reduce multiple integrals in a simple one

From measurements of




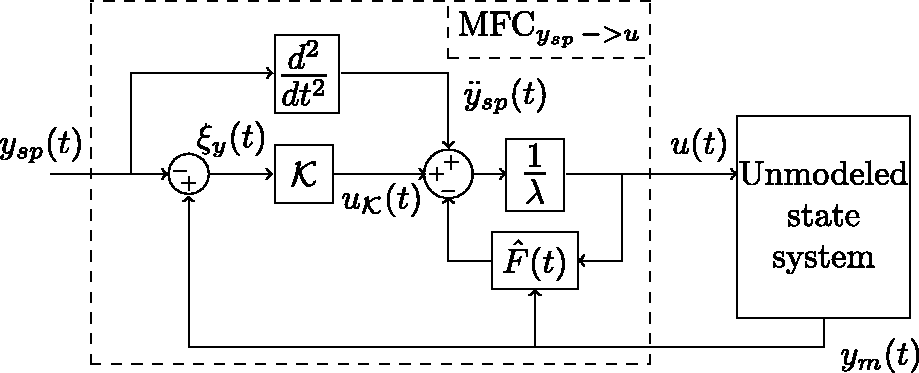
Overview of the model-free control schema.
Note that, if the error (
MFC design
The MFC closed-loop allows the design of both tracking and regulation performance with distinguished parameters that can be tuned with little prior knowledge of the system. The following points describe the design methodology used in this work to obtain the MFC parameters presented in Table 1.
MFC parameters used in the simulations.
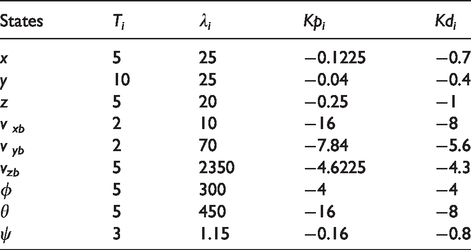
The proportional-derivative gains (Kp and Kd) have been easily tuned according to classical root locus method. In practice, the MFC estimator provides an accurate estimation of the system (
The feedback controller with these proportional-derivative gains can be identified by neglecting the initial conditions in the Laplace transform of equation (33)

Therefore, we obtain the following from equations (34) and (35)
2. The integration window (T) could be defined with prior information about the noise present in the measured signal (ym). The choice of the integration window implies some expertise according to a trade-off between fast estimations and effective noise attenuation. For instance, due to the integrator in equation (29) with low-pass filter features, a large integration window provides an effective noise attenuation, but slow estimations with a direct impact on the control-loop responsiveness. On the other hand, small integration windows result in fast estimations with the constraint of estimating noises. In this context, oscillations could be observed in the closed-loop system with high frequency commands (u), which is known as ‘chattering’. In this work, we use an invariant observer
44
that smooths the measured signals, allowing the set of small integration windows to estimate the fast dynamics of the DarkO tailsitter MAV while suppressing the oscillations generated by the noises in the closed-loop system. 3. Finally, the constant coefficient (λ) is used to scale the amplitude between the command (u) and the dynamics of (

From a practical point of view, the proposed MFC design allows a time-saving approach to stabilize complex dynamic systems. The fact that, the closed-loop system can be approximated by the dynamics of a double integrator system simplifies the control design process of proportional-derivative gains.
Control architecture
Figure 6 shows the main ideas of our control architecture. The block Trajectory generator is composed of a state flow algorithm that defines constantly the desired positions (xsp, ysp, zsp) in the inertial coordinate system. These references are taken into account by the Position control block and are compared with the respective measures (xm, ym, zm) creating three errors that are minimized by the MFC algorithms in the Position control block. These three MFC algorithms in charge of the position tracking, also compute the desired velocity in their respective axes. These reference values which are defined in the inertial coordinate frame are transformed to the body coordinate frame as well as the velocities measurements. Thus, the velocity control MFC
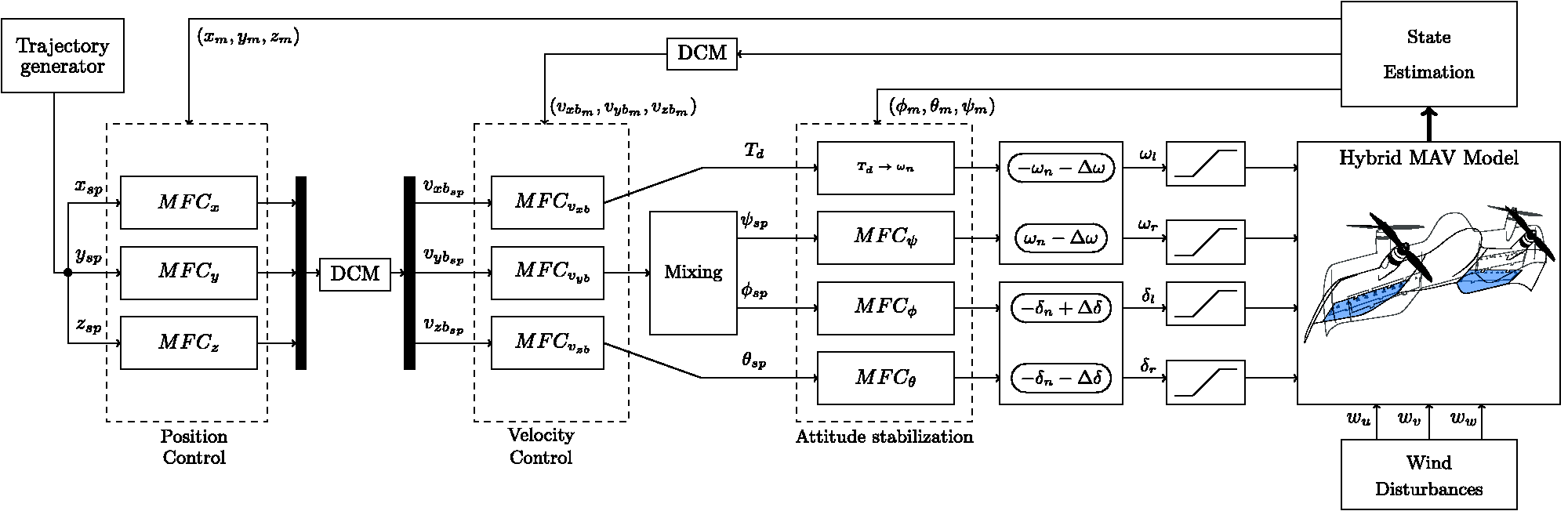
Cascaded MFC architecture designed for tailsitter MAVs. Position control blocks send desired velocities for the velocity control blocks that compute the necessary thrust value as well as the references for attitude stabilization control loop. Based on these desired values, propeller speeds (ωl, ωr) and flap deflections (δl, δr) are defined.
Flight simulation results
A comprehensive set of flight simulations, discretized at 500 Hz, were performed from MATLAB/Simulink using the tailsitter MAV model described in the ‘Simplified tailsitter MAV model’ section that is controlled by the proposed MFC architecture, see Figure 6. Our flight simulator is based on the DarkO tailsitter MAV dynamics with sensor measurements corrupted by Gaussian white noises, whose standard deviations can be found in literature. 45 The MFC parameters, i.e. λi, Ti, Kpi and Kdi, were tuned for the entire flight envelope of the DarkO with constant values for all flight simulations. In order to evaluate our control algorithm, we have introduced external perturbations such as wind disturbances during these flights. The results provide a straightforward way to validate the methodological principles presented in this article as well as to evaluate the designed MFC parameters, and to establish a conclusion regarding MFC benefits in both theoretical and practical contexts. The flight simulations are presented in a series of case studies in order to analyze separately each flight domain of the DarkO, such as hovering, transitioning and forward flights.
Hovering flight
In hovering flight, we analyze the velocity and attitude controller’s ability to recover the MAV from different unstable initial condition points. Also, we present an average frequency content of yaw and pitch angle signals using the Fast Fourier Transform (FFT) algorithm over the entire time that the signals were acquired. In addition, we present two position tracking missions in hovering flight, and we verify the interaction between the position, velocity and attitude control blocks.
Initial condition analysis
The initial conditions for pitch angle and for forward speed during the hovering flight (θic and 

The stability boundary presented in Figure 7, was empirically defined by evaluating all recovery trajectories from initial conditions to the desired setpoint. The desired setpoint corresponds to a stationary flight in the vertical position, respectively,

Initial pitch angle and forward speed condition analysis during hovering flight phase without wind disturbances. Forward speed setpoint equals to
FFT analysis
This analysis focuses on the MFC tuning problem. Usually, the flight controller parameters are adjusted according to a setpoint trajectory and with trim points in a respective flight condition. However, hybrid MAV covers different flight domains which would imply a variety of setpoint trajectories with different frequencies. Thus, we analyze the entire bandwidth of frequencies corresponding to the yaw and the pitch angle during the hovering flight. And, we compare its setpoint trajectory spectrum with its measured spectrum in order to evaluate the designed MFC parameters. We excite the attitude dynamics adequately in order to capture the important frequencies by varying the velocity setpoint along the

Frequency analysis of the yaw angle in hover flight.

Frequency analysis of the pitch angle in hover flight.
Hovering flight missions
The main objective of the first flight simulation in hovering mode, see Figure 10, is the study of wind influence in the position tracking, for the following desired positions

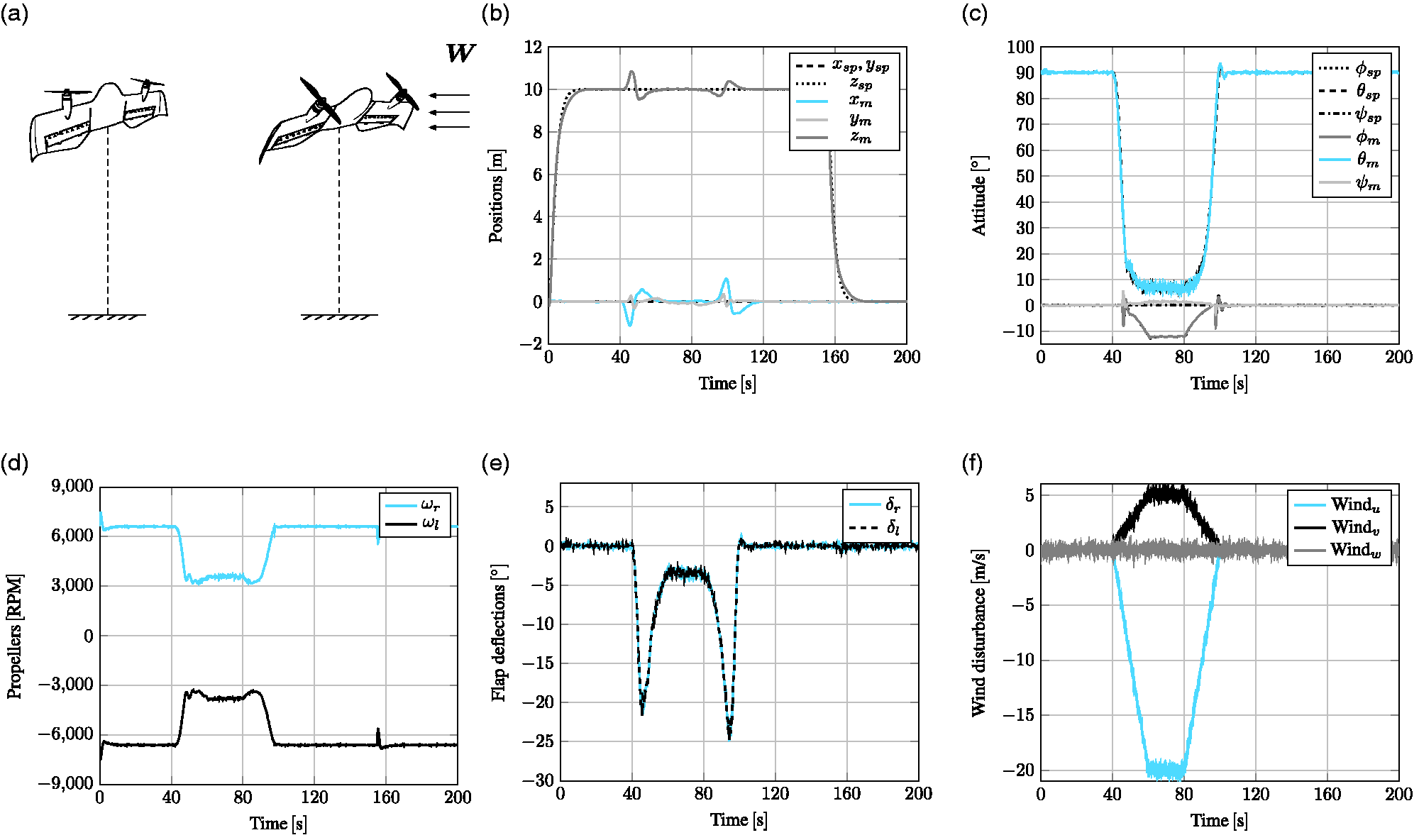
(
During this flight mode (
In the second flight simulation, we impose a circular setpoint path (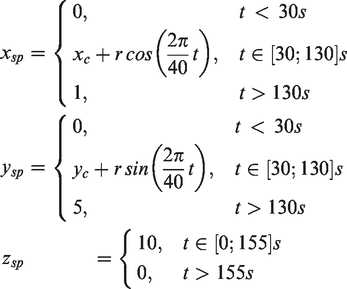

(
Transitioning flight
The transitioning flight simulations were examined in two parts. In the first one, similar to the hovering flight, we analyze the velocity and attitude controller’s ability to recover the MAV from different unstable initial conditions to the desired stable setpoint. The second case study presents variations of nominal hybrid UAV parameters in flight at different pitch angles in order to evaluate the MFC adaptive properties during the forward-to-hover transition.
Initial condition analysis
In this case study, we define a forward speed setpoint of 

The empirically defined stability boundary, for initial conditions in transitioning flight, is presented in Figure 12. The three classes of trajectories discussed in the hovering flight analysis, can be also observed in this case study. These trajectories have a slower convergence time with respect to the trajectories in hovering flight domain. Flap saturation affects the response time, but the main reason for the slower convergence time, in the transitioning flight domain, is the difficulty to decelerate the tailsitter MAV which depends on only of the drag force. For these initial conditions, the tailsitter MAV was not controlled in position allowing a supplementary degree of freedom to recover the stable attitude setpoint. During the transitional regime, that corresponds to the trajectory from the initial conditions to the setpoints, the tailsitter MAV loses altitude because the initial condition for both pitch angle and forward speed precludes the production of lift force and the thrust orientation is not adequate to compensate the weight of the tailsitter MAV. Thus, fast attitude stabilization is crucial to steer the thrust and bring the tailsitter MAV back to safe flight conditions.

Initial pitch angle and forward speed condition analysis during the transitioning flight phase without wind disturbances. Forward speed setpoint equals to
Parameter-varying analysis
In this analysis, we evaluate the altitude tracking and the attitude stabilization, more precisely, the pitch angle stabilization by imposing variations of mass and inertia at different points in the pitch angle trajectory during the forward-to-hover transition. For each point in which the variations occur, we compute the standard deviation between the altitude setpoint and its measurement. Figure 13 shows a typical pitch angle response time for the forward-to-hover transition with the nominal DarkO parameters. The altitude behavior and its standard deviation values computed for different mass and inertia values are also presented. We impose a maximum mass and inertia variation of around 45% of the nominal DarkO parameters. This study concludes that, the DarkO is less robust to variations of mass and inertia when it occurs between 20
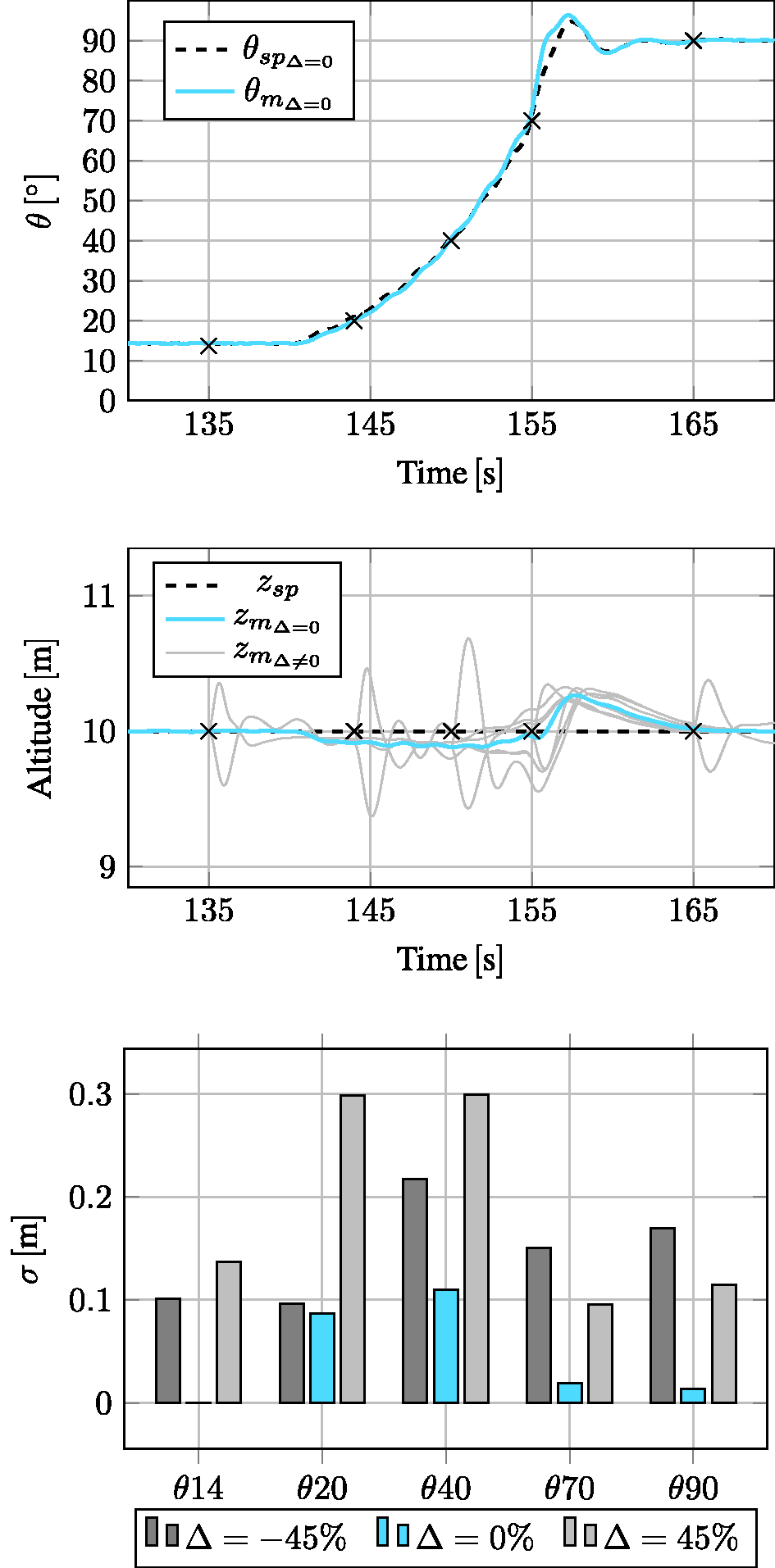
Parameter variation analysis for different points in the forward-to-hover transition. The black crosses in altitude and pitch angle trajectories indicate the points in which the parameters were changed. Δ represents the variation of nominal mass and inertia in percentage. The standard deviation between the altitude setpoint and its measurements is denoted by σ.
Forward flight
The last phase of flight studied corresponds to the forward flight. Given that, the MFC parameters are tuned for the entire flight envelope without any type of gain scheduled and the hybrid MAV dynamics change between the flight phases, we compute the FFT to the roll and the pitch angles in order to compare the frequency control performance with the previous results in hovering flight. In addition to this analysis, we present a full flight simulation exploring all hybrid MAV flight phases, with a major focus on forward flight, in which the hybrid MAV performs a position tracking.
FFT analysis
In forward flight, the roll setpoint

Frequency analysis of the roll angle in forward flight.
Pitch angle results are presented in Figure 15. We quantify a maximum pitch tracking error of 1.58
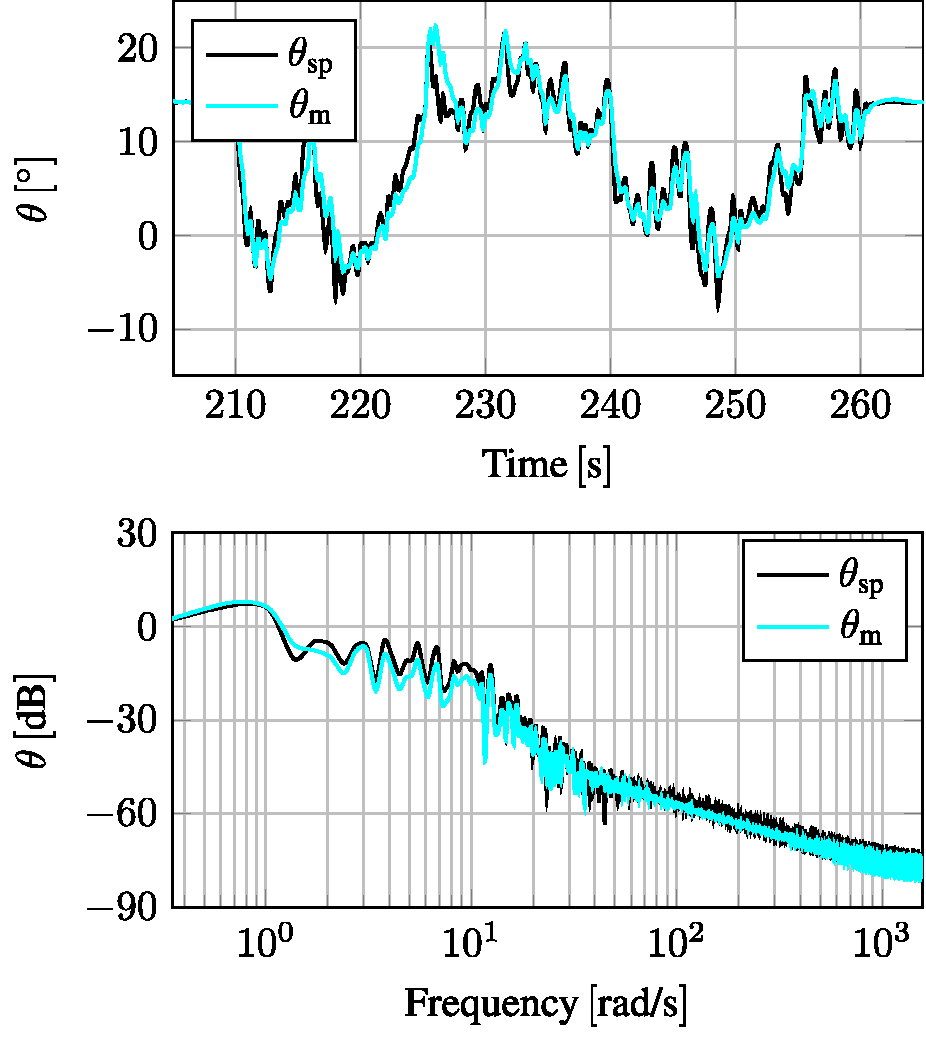
Frequency analysis of the pitch angle in forward flight.
Forward flight mission
A complete flight mission (

(
Flight tests
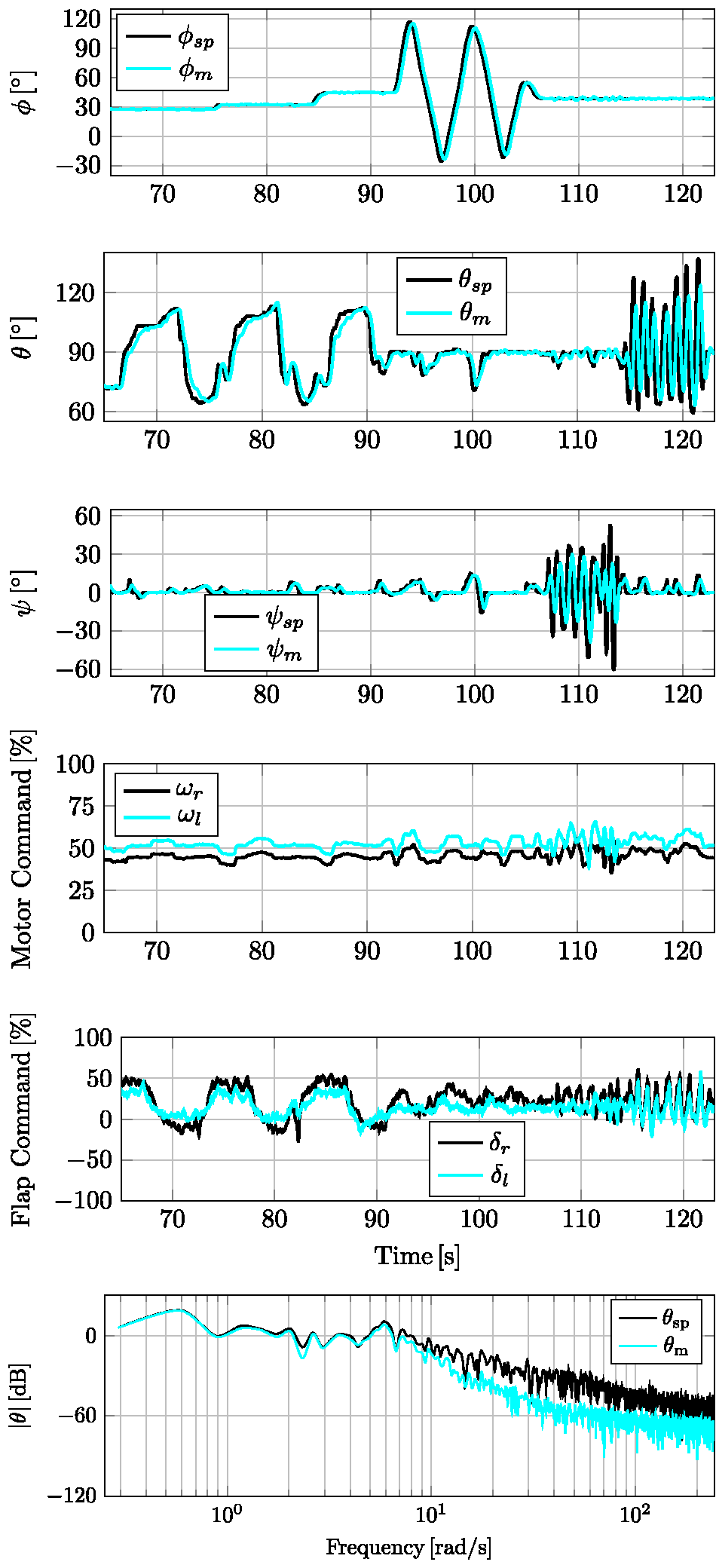
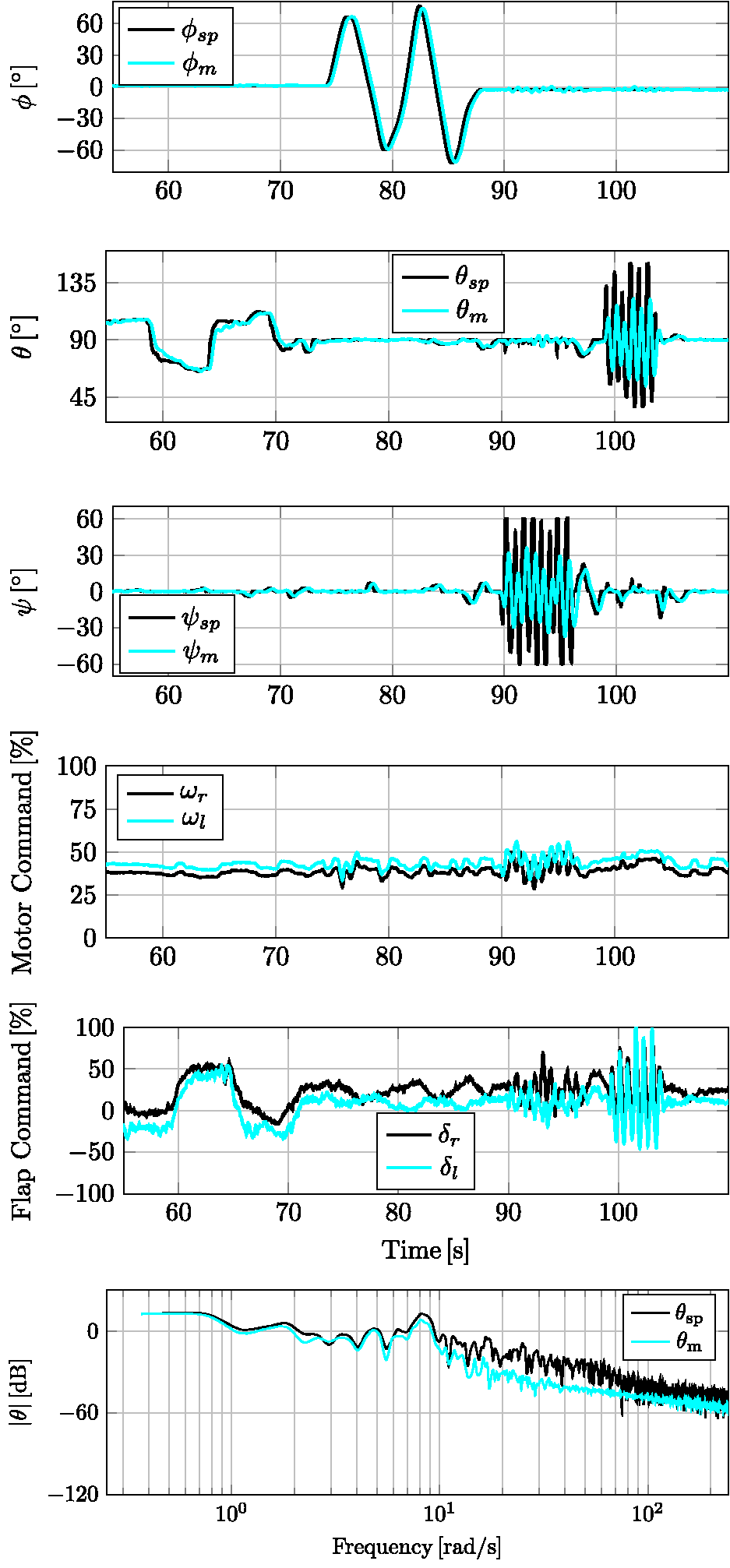
In this section, we present real-world flight tests to compare the MFC attitude stabilization performance to that of the INDI controller in indoor flight conditions. For more details about the INDI, we refer the interested reader to literature.25,46 Both controllers were tested using the Paparazzi Open Source Autopilot System. 47 The methodology used during the flight tests to define the DarkO’s attitude setpoints are based on four steps. First, with an RC transmitter, the security pilot imposes slow yaw setpoints generating lateral motions in the system. Then, slow pitch setpoints generate forward and backward movements according to positive and negative pitch setpoints, respectively. Then, slow roll setpoints which define the heading of the system. Finally, the pilot imposes fast yaw and pitch setpoints to evaluate the response of the system for high frequency attitude setpoints. Two flight test cases were conducted in indoor environment comparing MFC to INDI controllers. In the first case, both controllers stabilize the DarkO in its nominal configuration, i.e. wings and control surfaces are attached correctly. In the second case, the wingtips and half of the control surface are removed, and additionally the propulsion system has been modified by using a different set of propellers. The nominal components of the DarkO were changed to evaluate the adaptive properties of both controllers. The attitude stabilization results performed by MFC and INDI with the nominal DarkO, are presented in the Figures 17 and 18, respectively. Figures 19 and 20 show the MFC and INDI attitude stabilization performances for the modified DarkO configuration, see Figure 21. It is difficult to analyze graphically each controller in the time domain, because of their different setpoint trajectories. For this reason, we investigated their control performance in the frequency domain by calculating the FFT of the pitch angle, which is the dynamics most affected by a loss of control surface effectiveness. We observe a better tracking performance with a larger frequency spectrum for the MFC (20 rad/s) when compared to that of the INDI (7 rad/s) for the nominal flight test. Both controllers stabilized the modified DarkO, showing their adaptive control properties. The present study concludes that MFC and INDI provide satisfactory performance for hovering and transitioning flight domains in indoor flight conditions. These results suggested a more in-depth analysis to evaluate the performance of both controllers for the entire flight envelope of the DarkO, in particular during forward flights in outdoor environment.

MFC attitude stabilization – nominal DarkO.
INDI attitude stabilization – nominal DarkO.

MFC attitude stabilization – modified DarkO.
INDI attitude stabilization – modified DarkO.
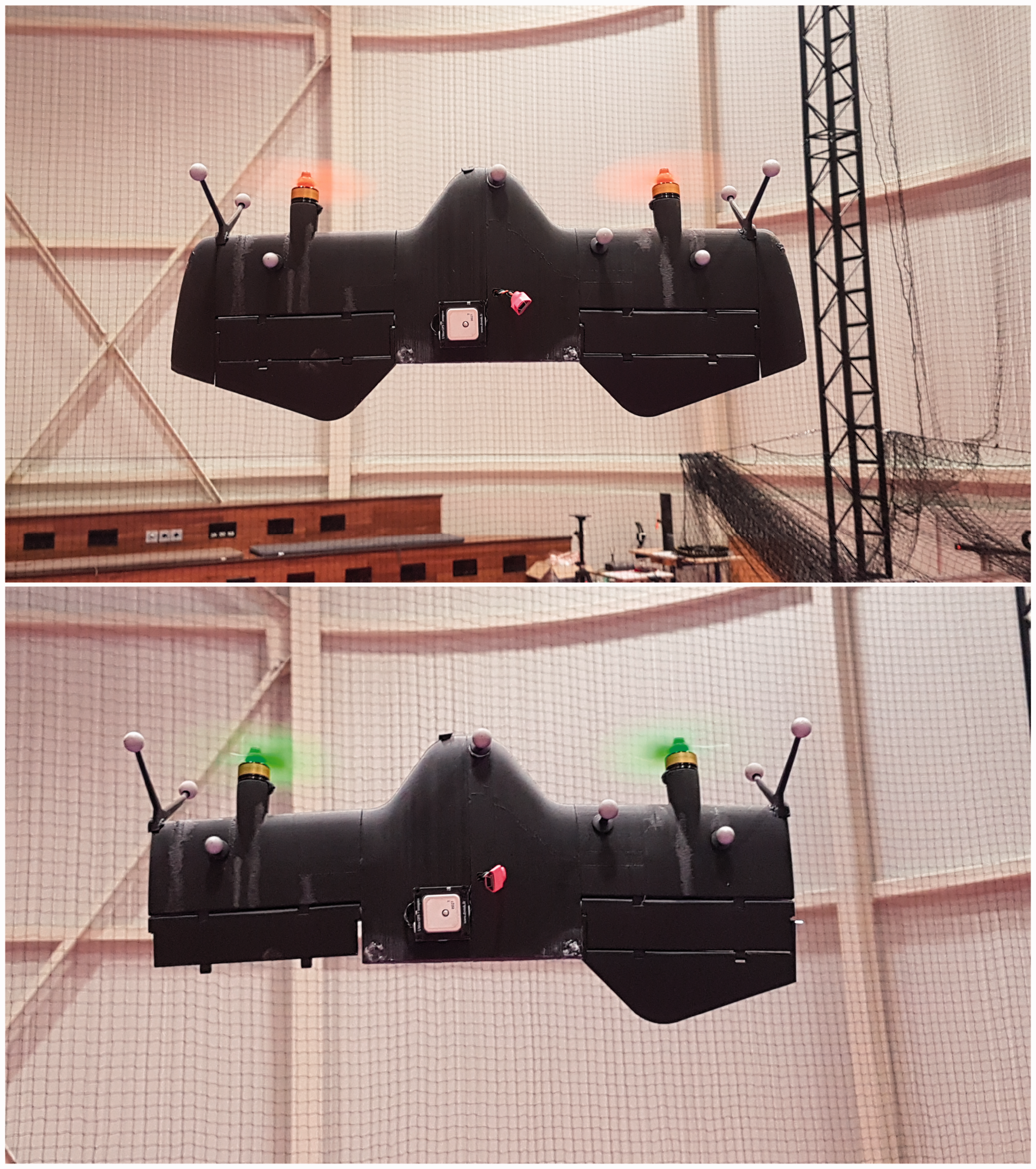
Tailsitter MAV configurations used during flight tests. At the top, DarkO with nominal wings, control surfaces and two-blade propellers. At the bottom, DarkO has been modified by removing its wingtips, half of its control surface and three-blade propellers were used.
Discussion and conclusion
The main objective of this study is to show the easy implementation of the MFC algorithm to different hybrid MAV platforms. We have presented the development of a full control architecture based on MFC techniques, applied to MAV with transitioning flight capabilities. Numerical flight simulations were performed in order to validate the interactions between each control block for different flight domains covering the entire tailsitter MAV flight envelope. Attitude control loop performance was examined in frequency domain during the hovering and the forward flight. The FFT results demonstrated high tracking performance for most of the attitude bandwidth. As a critical point, during forward-to-hover transition, we have investigated the adaptive properties of the controller by varying the parameters of the tailsitter MAV during flight. MFC algorithms estimated and rejected the variations of 45% of the nominal parameters providing a stable transitioning flight. The velocity control performance has also been investigated simultaneously with the attitude control block in hovering and transitioning flights for different unstable initial conditions. Both control blocks are able to stabilize the tailsitter MAV from a variety of initial pitch angles and initial forward-speeds recovering the MAV to stable equilibrium points. The proposed control approach provides high performance position tracking, velocity control and attitude stabilization without gain scheduling method and by using only little prior knowledge of the tailsitter MAV. Furthermore, the MFC attitude stabilization performance, its real time estimation and its adaptive properties have been validated in real-world flight conditions. In addition, comparative indoor flight tests between MFC and INDI have been conducted. However, it has been realized that in order to come to a conclusion between the performance of the two controllers, additional flight experiments have to be performed. In particular, during the forward flight phase at outdoor environment so that the disturbance rejection properties of each control approach can be compared and evaluated properly.
Future work will include additional flight tests with different MAV configurations with a wide variety of design parameters. We would also like to investigate if a proof of stability can be established, analyzing the adaptation properties of the MFC estimator in the closed-loop system.
DarkO MAV parameters
The DarkO hybrid MAV’s parameters used in this paper for all flight simulations, are presented in Table 2.
DarkO MAV parameters.

Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.