
Abstract
We treat the problem of simultaneous collaborative multiple micro air vehicles’ localization and target tracking using time-varying range and (relative and absolute) velocity measurements. The proposed solution combines robustly local nonlinear observers that estimate the relative positions between agents and their neighbors, and cooperative filters that fuse each agent’s local estimates to globally localize them with respect to the target (and therefore to each other). These estimates are then introduced in a dynamic consensus-type control law that ensures the global collective target tracking while simultaneously estimating the target’s velocity, without needing any external reference which makes it applicable in GPS-denied environments. Finally, a simulation scenario is studied in order to show the efficiency of the proposed solution.
Keywords
Introduction
Over the last decades we have witnessed the explosion of applications incorporating networks of robotic vehicles. Inspired by the behavior of animals in nature and motivated by the fact that a variety of objectives can be more efficiently, rapidly, and robustly accomplished collaboratively rather than independently, multiagent systems have been in the core of attention from both theoreticians and practitioners. Of particular interest have been applications involving multiple (aerial, ground, marine) vehicles that need to collaborate to achieve a common goal such as to ensure the exploration of unknown environments, to follow targets, to seek dangerous emitting sources, or to ensure high-precision photography. 1 Note that in order to attain the corresponding desired objective the location of the vehicles is an information of paramount importance. It is exploited in the guidance, control, and estimation algorithms that ensure the successful undertaking of the mission scenario. However, such global information, as obtained for example by GPS receivers, is not available in indoor environments 2 and in general, due to hardware malfunction or unavailability of the minimum number of GPS satellites. Instead local, low-cost sensors (cameras, infrared sensors, sonars) are usually incorporated to provide a sufficient localization.
This work focuses on the design of a distributed control law which in an ideal (perfect measurements, relative positions available) scenario ensures that a number of multiple micro air vehicles (MAVs) track the unknown motion of a target. Our precise objective is to propose a robust law based on (local) relative distance measurements and noisy velocity measurements to combine localization, target velocity estimation, and target tracking algorithms to obtain a globally exponential solution for the simultaneous collective agent localization and target tracking problem. The target can either be static, in which case this boils down to a consensus problem, or dynamic, yielding a setting similar to the classical leader–follower problem. In both cases, only a set of agents (at least one) usually has access to a relative information about the motion of the target while each agent has only access to local information. However, depending on the measurements available and the interagent communication characteristics, ensuring exact target tracking can be impossible and the mission objective is relaxed into following the target at a certain distance. Such a scenario arises exactly when relative distance measurements are available, instead of relative positions. These are possibly complemented by noisy relative or absolute velocity measurements of the agents. The reason why exact tracking cannot be achieved lies on the fact that distributed controllers frequently require relative position information. For that to be obtained the observability analysis reveals that a persistent relative motion between any pair of agents has to be present.3,4 The distributed control law has to account for this additional motion.
We propose a solution to the problem of collective target tracking for a target with unknown constant velocity (or unknown varying velocity but known acceleration) based on the agents’ relative distance, relative velocity, and absolute velocity measurements. The communication topology between agents is considered as undirected and connected, while the communication topology between the target and the connected followers (at least one) is directed, which yields a strongly connected digraph. Our contribution consists of: (a) designing a localization algorithm that provides for every agent an estimation of the relative positions with respect to its neighbors and the target, (b) designing an estimator for each agent that provides an estimate of the target’s velocity, (c) designing an estimator that filters the noisy relative velocity measurements and explicitly take it into account in the global stability analysis, and (d) designing a distributed control law that allows for the followers to collaboratively track the target and ensures a persistent relative motion.
Concerning the localization, in the literature we distinguish two large types of scenarios5,6: (a) Mutual localization, referring to the scenario where each agent needs to find its own (static) position in a reference frame common to the entire network and (b) collaborative localization referring to the localization of a (dynamic) target using an already mutually localized network. Our problem is of the second type. Depending on the community (control, robotics, sensors) and the mission objective, we can have 2D or 3D models, centralized or distributed algorithms, a variety of available measurements, for example absolute position (GPS), relative positions, distances, bearings or IMU measurements, and additional known points (anchors, markers). Additionally, the localization solutions can be signal/information based or model based which are essentially divided into optimization based and observer based. Observer-based, distributed estimation algorithms have recently been shown to present some rather interesting robust characteristics. In particular, it was established that observers which are distributed can enhance the quality of estimation by eliminating noise, see Tabarea et al. 7 and Li and Sanfelice, 8 which is of great interest in all applications.
Hence motivated by these recent developments and unlike the probabilistic and Kalman filter-based approaches,9–11 which cannot in general guarantee analytical global convergence, following Sarras et al. 12 we adopt an observer-based approach to treat the problem of multivehicle collaborative localization using time-varying range and relative velocity measurements without requiring any global positioning information. The range measurements can be obtained using a variety of sensors such as stereo-vision systems that typically equip robotic vehicles 13 or by combining monocular cameras from different vehicles. 14 This measurement scenario renders our obtained algorithm applicable to GPS-denied environments. We show that if each agent can obtain a good estimate of the target’s velocity then it successfully localizes itself with respect to the target by the combination of local estimates of its neighbors’ relative positions and the fusion with the neighbors’ own estimates.
As opposed to other works, for example Bahr et al., 15 Dandach et al., 16 Deghat et al. 17 our algorithm does not require global information (absolute position) but rather local measurements. Compared to the relevant work in Chai et al. 6 that treats the collaborative localization problem with respect to a static target, instead of single integrators we consider double integrator dynamics to model the agents’ translational dynamics and require no knowledge on the rate of change of the distances. Furthermore, we extend these results to the scenario of a dynamic target and show that by adopting an approach inspired by the recent developments on dynamically scaled Lyapunov functions18,19 we are able to show relative localization with a uniform global exponential convergence using a strict Lyapunov function.
Concerning the distributed control design, we follow the control paradigm laid in Hong et al.20,21 and followed by many others, for example Ren and Beard, 1 Cai and Huang, 22 Liu and Huang, 23 and references therein. We show that in the case of known relative positions the interconnection of a consensus-type tracking law and a consensus-type target velocity estimator provides a globally exponential tracking solution. Compared to the landmark work, 21 that more generally treats directed and switching graph topologies, we provide an alternative Lyapunov function that does not require knowledge of the global graph topology properties and thus, contributes in rendering it a truly distributed solution. While Ren and Beard, 1 Cai and Huang, 22 Liu and Huang 23 consider also cases of nonlinear models for the agents’ dynamics and more general graph topologies, they also assume that the relative positions are readily available and that all measurements are not corrupted by measurements. Works using mainly range measurements are focused on formation control, see for example Tron et al., 5 Montijano et al., 13 Oh and Ahn, 24 and Oh et al. 25
Although our results focus on target tracking, by straighforwardly modifying the control terms to incorporate desired distances between neighbor agents we can obtain a solution to target tracking with a prescribed formation of the followers and interagent collision avoidance, for the latter see the recent work of Franchi et al. 26 and references therein. These features are illustrated in the simulation scenario.
Model and problem formulation
Network topology
We consider that the interconnection graph describing the communication between the N + 1 agents forming the multiagent system, target included, is formed by an undirected graph describing the network of the N followers and a directed graph connecting the target to some followers. The complete (directed, strongly connected) network topology can be modeled using the Laplacian matrix

Dynamic model
We consider that the dynamics of each of the N + 1 identical agents composing the multivehicle system of interest can be described by the double integrator model


By the index i = 0 we denote the (static or dynamic) target with respect to which the localization will be referred. As is evident, the static scenario corresponds to a target’s dynamics


In the dynamic case, we assume that the target’s acceleration u0 is known or zero, with the latter corresponding to a scenario of a noncooperative target moving in straight line at maximal velocity.
Now, we naturally define the relative position, velocity, and acceleration between two agents as





For our localization problem, we consider that the available measurements consist of the relative velocities and distancesa


A simple derivation provides

In conclusion, the complete model on which our design will be based is summarized as



Cooperative localization
Before presenting our main results, we define some additional notation and then remind the definition of a persistently exciting (PE) function. The notation for a matrix A being positive (semi-)definite is expressed by

For the distance-based localization scenario we have at hand, we require that certain relative velocities are PE which means that in order for an agent to be able to reconstruct a relative position with respect to a neighboring agent, it is necessary to move out of the line of sight (straight line connecting two agents) for some time which in fact is required for the relative position to be observable.3,4 In practice, this condition imposes a requirement on the applied accelerations (control inputs) which can always be ensured for each agent by including an excitation term but however, might complicate the stability analysis.
Single vehicle localization from direct local measurements: Static target
In this subsection we will consider the problem of localization of each agent with respect to its neighbors by incorporating local, noiseless measurements, and considering a static target. This will be achieved by means of a designed nonlinear observer based on the invariant-manifold observer methodology, see Astolfi et al. 27 and Karagiannis and Astolfi 18 for the general setting and Martin and Sarras, 28 Martin and Sarras, 29 and Sarras et al. 12 for recent applications on MAVs.




With the choice



From Lemma 5 of Loría and Panteley 30 we know that the nominal system (22) has a uniformly global exponentially stable (UGES) equilibrium at the origin for a PE and uniformly bounded vij.


This lemma will be exploited in the construction of a strict, dynamically scaled Lyapunov function of the more general solution that follows in the next subsection.
Single vehicle localization from filtered local measurements: Dynamic target
In continuation of the previous scenario, we proceed to extend the localization algorithm to the case of a dynamic target in the presence of noisy velocity measurements, without assuming any particular noise characteristics.








Selecting further the βi mapping as

the zi dynamics obtains the more explicit form

Taking the function


Then, the time derivative of

Choosing


By simple derivations one can show that the following function




Selecting then the functions




Then, using the PE condition, UGES of the nominal zi system with respect to the origin, and UGES of the origin for the
Collaborative localization from fusion of local estimates and measurements
In this subsection, we take advantage of the collaborative setting between the agents, which share information with their local neighbors, in order to enhance the localization capabilities of the agents, in particular, that do not have direct relative measurements with respect to the target. Of course for a static target the measurement vi of each agent suffices.
To this end, define the fused estimate of the relative coordinates between agent j and the target as


Then, the proposed consensus-based estimation mechanism for agent i, that exploits the fusion of its own estimate with the ones of its neighbors to produce a more accurate fused estimate, is given by

We now state the following result.






Furthermore, when


Then we obtain the consensus system



As is well known, from the properties of the assumed underlying graph topology, we have that the nominal system

Collaborative tracking control with unknown target velocity
We now examine a distributed control law that ensures the tracking of a target with unknown velocity. Furthermore, the target’s velocity needs to be estimated by means of a (globally) converging observer. Finally, we will modify the proposed control law by adding an additional term in order to impose a motion to each agent such that the persistence-of-excitation condition (17), required by the localization algorithm, is readily satisfied.
For ease of reference we remind the main working assumptions:
The acceleration u0 of the target is known or zero. The interagent communication is defined by a static undirected, connected graph topology modeled by its Laplacian The topology between target and agents (at least one) is described by a directed path (at least one) and as such the complete topology is strongly connected.
Case: Known relative positions
In this subsection we consider first the ideal scenario where the relative positions xij are measured. This is summarized in the following assumption.
This assumption will naturally be removed when we consider the interconnection between the localization algorithm and the control law.
Let us first define by


Furthermore, define the error variablesb



The error dynamics can then be shown to take the following form








Its time derivative along trajectories of the error dynamics gives


Then with the selection









We finally obtain

Case: Estimated relative positions
We now couple the proposed control law with the observer for relative positions. The control law (46) and the target velocity estimator become

To this end, and in order to simplify notation, we define the column stack of the relative position estimates as

Then, we can write compactly the complete closed-loop system as
Imposing the PE condition through the control
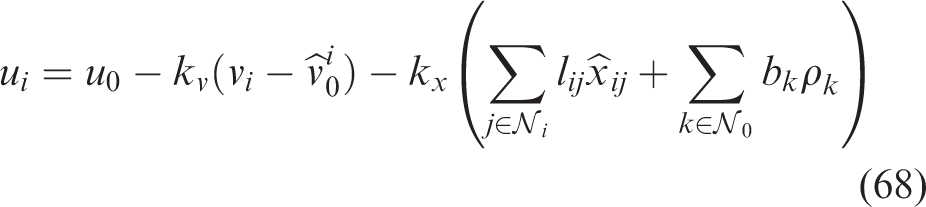
Now we consider an additive term to our control law that should be defined in a way to enforce the PE condition, i.e. produce a sufficiently rich motion for every pair of neighboring agents, but conserve the network’s stability properties.
The modified control law for each agent now takes the form


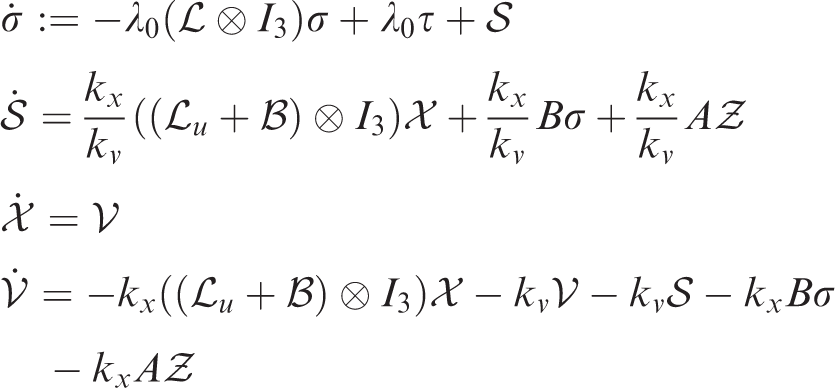
For the stability analysis we define the stack of all

Then we write the complete closed-loop system as
Based on the analysis of the previous subsection and by treating the input uPE as a disturbance, we can show that our closed-loop system is ISS with respect to uPE from which we can conclude practically global exponential stability since convergence is ensured to a neighborhood of the desired equilibrium trajectory that can be made (by assignment of the free function uPE) very small but not identically zero.
Simulation results
In this section we study the efficiency of the obtained algorithms by means of numerical simulations that serve as proof of concept. We will consider a two-dimensional scenario with three agents pursuing a target with constant linear motion. This motion is selected so that the target does not contribute to the satisfaction of the PE condition but rather is a task to be ensured by the agents. Additionally, we consider that the target is (and stays) in the field of view of only the first agent which is thus the only agent having available information about the target. We consider that all (relative, absolute) velocity measurements and accelerations are corrupted by Gaussian white noise.
The initial positions (in m) and velocities (in m/s) of the agents are, respectively, given as
We assume that we do not have any prior knowledge on the relative positions and thus, choose the estimates as
Furthermore, we consider the standard scenario where velocity measurements are corrupted by band-limited Gaussian white noise nij (although any type of noise can be considered) with noise power intensity
On the other hand, the control gains for the distributed law are chosen, respectively, as kx = 1 and
The resulting positions of the target and the agents are depicted in Figure 1. In the ideal scenario where the relative positions would be available, and hence not requiring a persistent motion of the agents, and with no measurement noise, the positions of all agents would exactly converge to the target’s position. However, since a persisting motion is required to successfully estimate the relative positions, the positions of all agents converge in neighborhoods around the target’s position with their size depending on the amplitude of the corresponding persistent input. Of course, the smaller the amplitude of the persistent input the slower the convergence of the estimated relative positions.
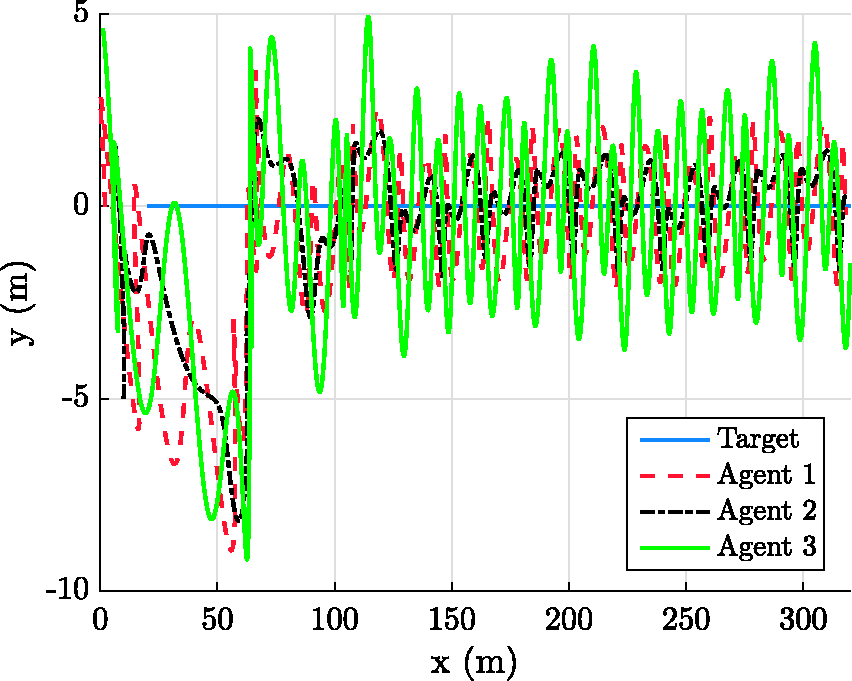
Positions of the target and the agents.
From Figure 2 we see that the velocities are PE (and linearly independent) and thus, we can obtain converging local estimates of the relative positions (see Figures 3 to 5). Figure 6 depicts the noisy, estimated and true values of the relative velocity v10 in order to illustrate the persistent excitation and the effect of the applied filtering. In particular, by zooming on a specific time interval we observe the effect of the noise as well as the result of the filtering. Of course, the former can be further adjusted by proper selection of the filter gains. Similar effects are observed for the other relative and absolute velocities. In addition, notice in both components the effect of the persistent motion required in order to be able to estimate the relative position. As such, this persistent motion (and its magnitude) is imposed by the persistent part of the ith agent’s (agent 1 for this figure) control law (

Agents’ true velocities.

Estimation error for x10.

Estimation error for x23.

Estimation error for x13.

Relative (noisy, estimated, true) velocity v10 (upper: first component, lower: second component).

Error between fused estimates ρi and true relative positions
Now, in order to show the robustness of the proposed approach and how it can be adapted to other scenarios of interest, we consider the same scenario, with same initial conditions, noises, and gains, but now taking into account a desired formation geometry and the interagent collision avoidance. For the former requirement we need only to modify the control law and the target velocity estimator in order to include the desired distances (relative positions), which we simply select as

The evolution of the agents’ positions, the geometric formation of the followers in different time instances, and the relative distances are depicted in Figures 8 to 10, respectively. We observe that the additional requirements (formation and interagent collision avoidance) are readily satisfied and that the relative distances among followers converge around the desired nominal value. The discrepancies observed are due to the contribution of the persistent terms, that are required to ensure the observability, and the desired formation geometry.

Formation scenario: positions of the target and the agents.
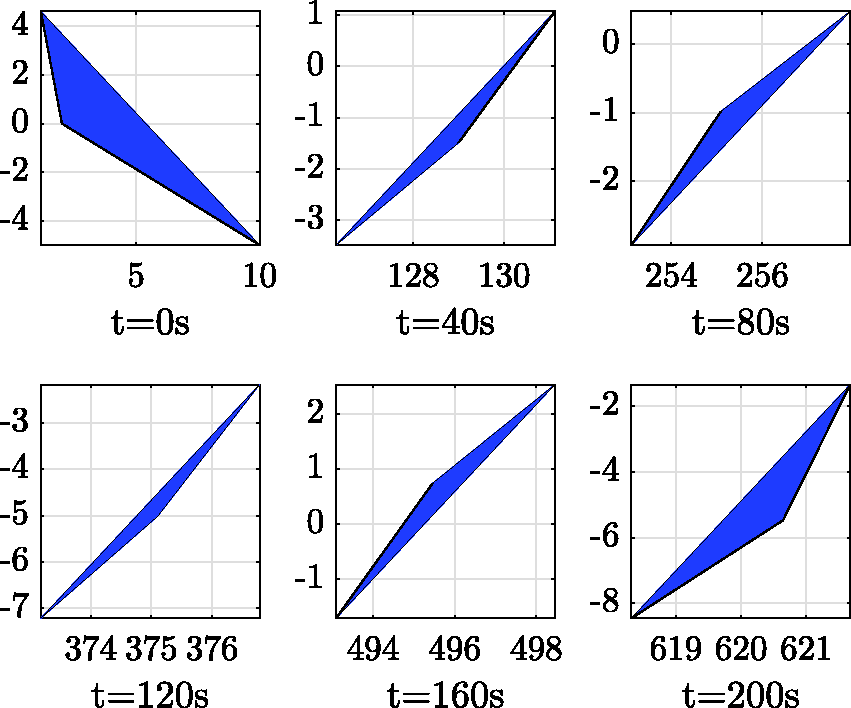
Formation scenario: evolution of the formation of follower agents ((x−y) in (m)).
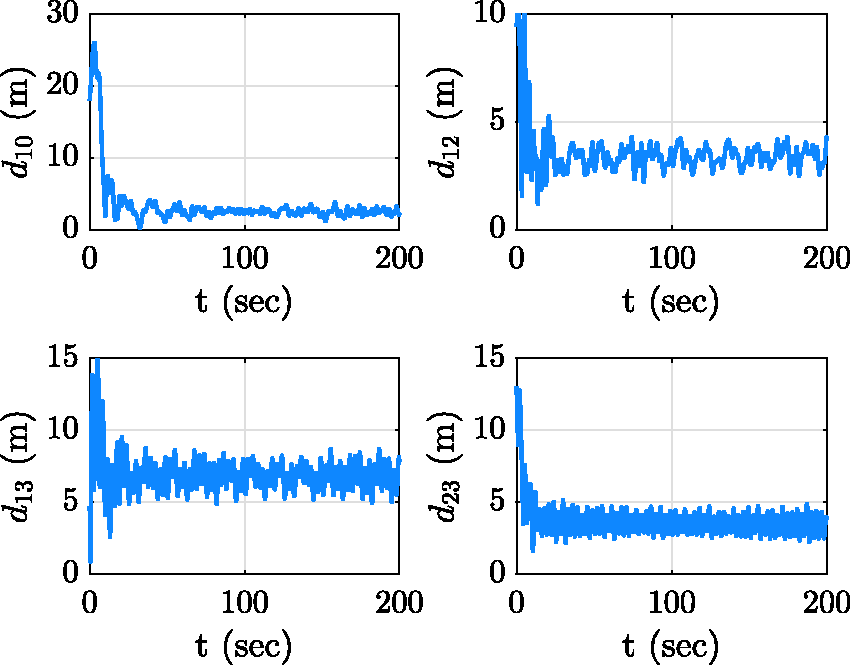
Formation scenario: relative distances.
For completeness, we illustrate also the time evolution of the true velocities of all agents in Figure 11 as well as the fused estimates for the relative positions in Figure 12. As expected, the estimates have a slower convergence with respect to the previous scenario and present some slight oscillations due to noise around the true values.

Formation scenario: agents’ true velocities.
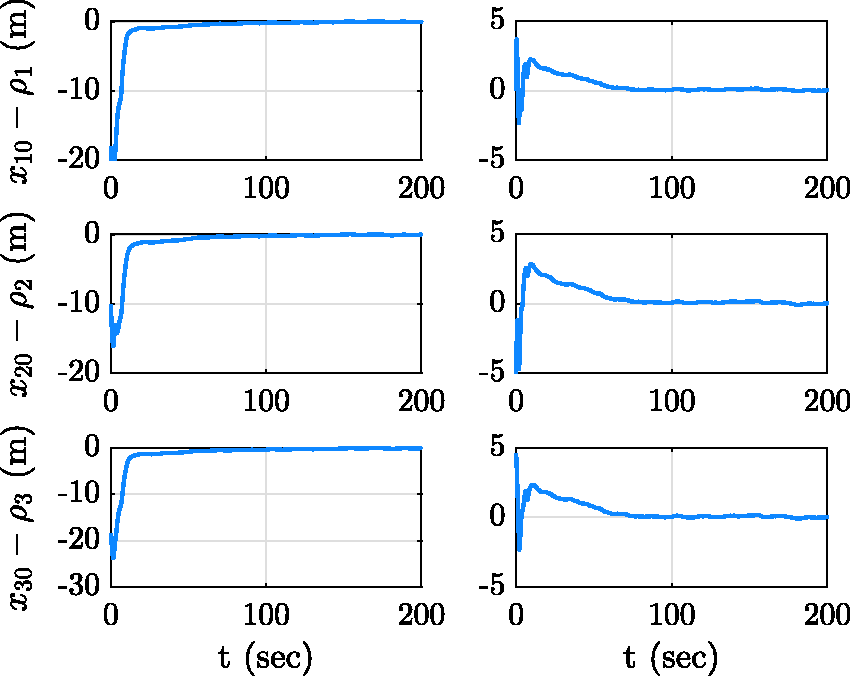
Formation scenario: error between fused estimates ρi and true relative positions
Conclusions
We have proposed a robust algorithm for simultaneous collaborative localization and target tracking problem. The localization mechanism exploits (local) relative distances and noisy velocity measurements so that each agent first obtains an estimation of the relative positions with respect to its neighbors and then fuses this estimate with the ones communicated by the neighbors. These estimates are then fed to a consensus-type distributed control law that includes an estimation of the target’s velocity, to achieve exact target tracking. Our algorithm is designed to ensure the observability of the system, represented by a persistence-of-excitation condition on the relative motion of the agents, and the attenuation of noise. The stability properties induced by our algorithm are established through a thorough Lyapunov analysis. Finally, the performance of our scheme is analyzed by means of two simulation scenarios that show among others the robustness to unaccounted acceleration measurement noise and the possibility to consider a formation geometry and interagent collision avoidance.
In the near future, these theoretical results are expected to be tested experimentally on our fleet of quadrotors and under realistic environmental and communication scenarios.
Footnotes
Acknowledgements
The first author would like to acknowledge the fruitful discussions with prof. Emmanuel Nuño of the University of Guadalajara, Mexico.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the PR-GUIMAUVE of ONERA.