
Abstract
Today it is possible to buy small and cheap drones in toy stores, supermarkets, and on numerous online shops. Often, these drones are very lightweight and are flown in backyards, sport fields, parking lots, and such places. They typically pose no lethal threat to people in the vicinity of the drone. Nonetheless, in many countries such drones are regulated by aviation rules that does not (sufficiently well) distinguish between these drones and the larger hobby or professional drones. Consequently such small drones are flown illegally. This has prompted some national aviation authorities to consider a form of ‘harmless’ category, which ideally should be based on a mass threshold. To aid such a classification this work proposes a mass threshold of 250 g, below which, we argue, it is reasonable to classify drones as ‘harmless’ in the sense that the expected fatality rate is equivalent to that of manned aviation. In this work we combine a series of models and methods to provide a foundation for giving a mass threshold. The approach is probabilistic and focuses on the relation between mass and human injury in the case of small drones. The approach is also parameterized such that readers can substitute other probabilities and conduct their own calculations, possibly determining a different mass threshold.
Introduction
Introducing new legislation for unmanned aircraft is a worldwide challenge that national aviation authorities in most countries find difficult and time consuming. This comparatively new area within aviation is in many aspects different from manned aviation and therefore requires new regulation. One such difference is the size and weight of the aircraft; once unmanned an aircraft can become arbitrarily small. As a consequence it makes sense to divide the unmanned aircraft into size categories and impose less stringent requirements on comparatively smaller categories. One interesting category is the ‘no harm’ size, which is loosely defined as aircraft that cannot do harm to people through physical interaction (except intentionally through chemicals, explosives, and other such means). For aircraft of this size it would not be necessary to consider the safety measures that otherwise apply to drones, making them much easier to manufacture and operate as well as making the regulation easier to enforce. This work investigates what would be a proper criterion for a ‘harmless’ category.
Since this work is addressing specifically the very small unmanned aircraft that popularly are called ‘drones’ this term is also prevailing in this work. Most of the referred literature would use unmanned aircraft system (UAS) or remotely piloted aircraft system, a subset of UAS. Some literatures also use now obsolete unmanned aerial vehicle (UAV).
Background
This work was prompted by growing desire from national and international regulators to have a mass threshold below which it would be reasonable to significantly relax regulatory restrictions without compromising public safety. That is, a ‘no harm’ threshold in the sense that drones below this mass in all probability would not cause severe or fatal injuries under any circumstances.
It seems justified that such a threshold does exist; large drones obviously can be lethal on impact, while tiny drones (say, less than 1 g) do not pose any direct threat to human safety. The challenge is to find a threshold where we pass from the latter situation to the former.
The fast development in miniaturization and low-cost manufacturing of simple consumer electronics means that drones are now available to everybody through toy vendors, supermarkets, ‘add to basket’ websites, etc. The national aviation regulations are typically not updated at the same fast pace and consequently, when people operate very small toy drones in their backyards they might inadvertently violate regulations even though the drone probably could be categorized as ‘harmless’. Being unable to – and generally not interested in – limiting this widespread use of toy drones civil aviation authorities might introduce the ‘harmless’ category to legalize at least the smaller of these aircraft.
Recognizing that although a limit on the mass of a drone is very easy to enforce (in the sense that determining the mass of a drone is easy) determining a meaningful threshold value is perhaps not so easy. From a safety point of view the threshold should be sufficiently low to reduce the probability of fatalities to almost zero. But the large variety of drone designs will then inevitably lead to a fairly or even very conservative limit for a significant part of the drone types. However, since combining only worst-case scenarios will lower the limit to the point where it is no longer useful this work will instead propose a mass threshold based on probabilities.
Previous work
Classification
Categorization or classification of unmanned aircraft has been the subject of previous publications and is part of many, if not all, national regulations for unmanned aircraft. Indeed most such regulations categorize aircraft according to mass, for instance using 1.5 kg, 7 kg, 20 lb, 20 kg, 55 lb, 25 kg as thresholds. A harmless drone would normally be (at least) in the lowest mass class, but given that the threshold for this class varies by two orders of magnitude between classification schemes (see below) it is also evident that a ‘smallest’ class does not automatically imply any reasonable interpretation of ‘harmless’.
National regulation classifications
Most national regulations invoke mass classifications in order to have different regulatory requirements applied to different size drones. Some national regulations have several classes while others have few. Australian regulation1,2 classifies ‘very small RPA’ to be drones between 100 g and 2 kg and ‘micro RPA’ to be drones less than 100 g. The class ‘micro UAV’/‘micro RPA’ has existed in Australia since 1998 and drones in this class are largely exempted from regulation that governs larger drones. The author has been unable to determine the origin of the 100 g and 2 kg limit. United Kingdom Safety and Airspace Regulation Group Unmanned 3 has ‘Small Unmanned Aircraft’ at less than 20 kg (the reasoning for this threshold is ‘historic developments in manned aviation’) as well as a ‘UAS Operating Safety Case’ class at less than 7 kg. France ministre de l’écologie du développement durable et de l’énergie 4 has ‘D category’ at less than 2 kg. Denmark Ministry of Transport and Building 5 and Sweden Transportstyrelsen 6 both have ‘category 1A’ at less than 1.5 kg (with the additional Swedish requirement of less than 150 J). New Zealand Civil Aviation Authority of New Zealand7–10 has ‘Small unmanned aircraft’ at less than 25 kg (plus an unnamed class up to 15 kg). Canada Transport Canada 11 has an unmanned aircraft class for less than 25 kg (as well as a ‘model aircraft’ class of less than 35 kg) with exemption for less than 2 kg. Canadian authorities are considering using the same threshold for a ‘very small UAS’ class, which alternatively may be based on surface energy density at (proposed) less than 12 J/cm2 12 ; this threshold is equal to the proposed ‘Micro UAS’ class in Fraser and Donnithorne-Tait 13 (also of Canadian origin). Switzerland Das Eidgenössische Departement für Umwelt Verkehr Energie und Kommunikation 14 has a class of less than 30 kg (with limited liability insurance requirements for less than 500 g). NASA Maddalon et al. 15 has ‘category I’ at less than 25 kg (and less than 36 m/s).
Additional classifications
US Department of Defense
16
uses ‘small’ for drones at less than 25 kg and refers to approximately 1 lb as ‘micro’. UK Ministry of Defense
17
uses ‘micro’ for less than 2 kg. The UVSI Yearbook
18
had ‘micro’ (less than 5 kg) as the smallest class until 2008, where ‘nano’ class was introduced with a threshold at 250 g. The yearbook does not offer an explanation for this choice of threshold. In Lacher and Maroney
19
‘very small UAS’ is listed as less than 1.5 lb. In Weibel and Hansman
20
the micro class is ‘less than 1 lb’ and in Weibel and Hansman
21
‘less than 2 lb’. In Watts et al.
22
‘small UAS’ means ‘typically 2–5 kg’, while micro is taken to mean ‘size [that fits] individual soldiers backpacks’. The Micro Unmanned Aircraft Systems Aviation Rulemaking Committee
23
defines a ‘Category 1’ of less than 250 g and a category 2 of ‘a maximum risk impact threshold of a 1% chance of AIS level 3 or greater injury, based on kinetic energy transfer at impact’. The committee will allow aircraft in category 1 to conduct ‘operations over people’ solely based on mass. The threshold originates in Unmanned Aircraft Systems Recommendations Registration Task Force Aviation Rulemaking Committee,
24
which stresses that this ‘weight threshold [is] for registration purposes only’, and thus does not (necessarily) constitute a ‘harmless’ threshold. The task force arrived at 250 g through a fairly simple computation that assumes a very low person density on the ground, a rather high drone reliability, and a high impact velocity (based on free fall rather than propelled flight) and consequently a (compared to the present study) somewhat higher probability of fatality upon impact. Weibel and Hansman
21
calculate that an ‘MTBF [mean time between failure] of 100–10.000 hours’ will result in a fatality rate of at most
Ground casualty risk
As a small drone by definition is not carrying any people any human injury associated with a drone crash must necessarily be humans at the location where the drone impacts the ground (or grounded objects). Consequently, the probability of fatalities is closely related to probability of impacting persons. This probability has two main components: density of people at the crash site and probability of the drone to impact one or more persons in a more or less harmful way. The former probability can generally be determined fairly accurately for a given geographical area where the people density is known and fairly homogenous.25,26 The latter probability has been subject of some research. In King et al. 27 the probability of impacting people is investigated using a falling debris model and in Cole et al. 28 different body parts and different body postures are considered along with different debris impact angles using the BC criterion.
Drone reliability
Reliability is the probability of a drone to behave according to specifications. This parameter is a vital component in a risk analysis since it describes how much the drone can be trusted, on average, to not experience malfunctions that may create hazardous situations. Reliability can be quantified by as little as a single figure for the entire system to a detailed description of individual component reliability and their interdependence. Being a fairly recent technology the empirical information on reliability of smaller civilian drones is somewhat limited, so a quantification of reliability for such drones must to a large extent rely on component analysis. This can be done with methods such as fault tree analysis, failure modes and effects analysis (FMEA), or functional hazard assessment. Often, such methods require information on component reliability which typically is not available for smaller hobby grade drones, where the components never have been subjected to a rigorous reliability study.
There does exist some literature on various approaches to quantify reliability of smaller civilian drones. Considerations on what would constitute a sufficiently reliable delivery drone are presented in Schenkelberg. 29 A group of students 30 has conducted a reasonably detailed investigation into the reliability of a specific small RC model aircraft, an Ultra Stick 120, a 4–5 kg aircraft, concluding a MTBF around 50 flight hours. And in Venkataraman et al. 31 using the same aircraft stuck actuators are investigated both in terms of consequence and probability. Actuation failure modes are investigated in Freeman and Balas 32 using FMEA (also using the Ultra Stick 120 at 7.4 kg).
Human injury
Drone-inflicted injuries
Laback et al. 33 provide examples of the severity of close encounters with RC model planes, in particular larger models. The exemplified injuries are largely associated with ground handling rather than impact during flight. A study on the effect of helicopter toy drone blades on human eyeballs 34 found that at least for smaller blades the effect is negligible. Five models with tip speeds up to 25 m/s were tested and apart from corneal abrasions, no injuries were observed. For medium-sized helicopters (65 cm rotor diameter) the eye injury resulting from impact with a dislodged rotorblade at full speed can cause full rupture of the eye ball resulting in immediate and permanent loss of sight. 35 A study with an airworthiness certification perspective 36 looks at less than 15 kg aircraft and applies the empirically based blunt (ballistic impact) criteria (BC) from Bir and Viano 37 to relate aircraft mass to injury severity. BC is basically kinetic energy relative to impact area, mass of impact object, and thickness of the body wall of the target. Radi 38 develops a model based on the BC to predict severity of blunt drone impacts, and based on this makes some recommendations on drone design as well as concluding that 400 g at 15 m/s (40 J) is the limit for ‘severe injuries’. According to Burke 39 a mass threshold of 2 lb and kinetic energy threshold of 66 J ‘can be considered nonlethal’. This is based primarily on Range Commanders Council 40 and Lyo et al. 41
Drone-like injuries
Injuries resulting from impacts with smaller objects have been analysed and studied for decades. This includes bullets from smaller weapons, fragments from explosions,42,43 debris from accidents,28,44,45 less lethal projectiles,37,41,46–48 melee weapons, both sharp and blunt, behind armour trauma, 49 and impact injuries in baseball, hockey, lacrosse. 50 A good overview of the biomechanics of chest and abdomen impacts is in Viano and King. 51
A few relevant key points arise from the body of research into impact-related human injuries. In relation to the challenge at hand perhaps the most important observation is that mass and kinetic energy are generally poor indicators of injury severity, that the human body reacts differently depending on the impacted body part, and that injuries only relate to the kinetic energy dissipated in the body, not the kinetic energy of the impacting object. A number of more accurate and empirically verified models have been developed. One model that fits well to a drone (chest) impact scenario is Viano and Lau
52
which uses a lumped-mass thoracic model to develop a VC parameter, where V is thorax compression velocity and C is compression relative to chest depth. The VC parameter for a given impact maps well to injury severity. Another model is the BC
53
defined as

Present work
This work focuses on identifying an actual probability of a drone being harmful to humans given the mass and with all other parameters being equal. The probability model for fatalities is a combination of probabilities for the events leading to an injury and the injury mechanics. Each of these probabilities is extracted from a variety of sources and combines with a short survey of very small drones (to determine typical mass and speed relations). The novelty in this work is determining an actual mass threshold that with the present body of scientific work available can with reasonable confidence be labelled ‘harmless’. Although a number of sources report different thresholds in 2 or 3 digit grams, and some indeed recommends 250 g, it is mostly either peripheral results from a study of larger drones, or relatively simple computations that does not account for the particulars of very small drones.
Regulatory application
During the early phases of the preparation for the now present law on drones in Denmark, the Danish Transport and Construction Agency (DTCA) wanted to include the ‘harmless’ category with the expressed intent to relax the regulatory constraints to allow toy drones to be used similar to other toys (i.e. no need for registration, education, and other such measures) as well as allow very small commercial drones to operate more freely. Since a large part of the target audience for such a category is people without any training or relation to aviation the threshold must be very easy to understand and to check. So despite the scientific arguments against a mass-based threshold and the ‘worst-case’ arguments against any specific threshold, the DTCA embraces it as a pragmatic solution to a challenging problem. Existing national regulations (and the associated guidelines) in some other nations indicate at least implicitly that this view is shared by a number of national aviation authorities.
For Denmark the harmless threshold was first officially endorsed in a report published by DTCA in March 2015 54 to outline future Danish regulation. It specifically recommends 250 g as a ‘harmless threshold’ (page 8, recommendation ‘a’) based on the research presented here. The 250 gram limit is also to be found in a new Act in Danish legislation on drone operations outside urban areas (expected to enter into force on July 1, 2017). Here the category is termed 'micro drones' and such drones are exempted from drone and pilot registrations, liability insurance, and requirement of minimum distances to buildings, roads, and people.
In a technical opinion from EASA 56 (p. 19) (a precursor to actual European regulation), a ‘harmless’ subcategory is proposed, due to numerous requests from the drone community, as Proposal 11 to accommodate ‘toy aircraft or nano drones that cannot cause serious injuries or significant damage’, and with a reference to a preprint of this work 250 g is listed as a suitable limit.
The ‘Drone Collision’ Task Force under EASA in its final report 57 adapts a 250 g threshold for their smallest category, stating that ‘A [midiar] collision with the smallest drone category [harmless]]is expected to be harmless, […], at least for large aeroplane product types’. A preprint of this work is listed as reference in this report.
Methods
This section is divided into four parts. The first part is the two subsections presenting the basic and simplifying assumptions used to determine the threshold. The second part presents the probabilistic methods used. The third part explains the relation between kinetic energy and human injury, and how to find an appropriate kinetic energy threshold. Finally, the fourth part is on establishing the mass threshold from a kinetic energy threshold.
Basic assumptions
The development of a mass threshold will be based on a number of assumptions, divided into two categories. The basic assumptions which in some sense are circumstantial to the investigation and the simplifying assumptions are described in the next sections. The basic assumptions are listed here and are unchanged throughout this work. They serve to frame the problem and describe the circumstances under which the threshold is meant to have effect.
It is assumed that the mass threshold is at most 500 g, and as such the list of drones forming the basis of the statistical analysis will exclude any drones above 500 g maximum take-off mass.
The probability of a fatality
As a consequence of the above assumption mid-air collisions are not considered.
It is assumed that people are not aware of the presence of a drone. It is not assumed that people will be attempting to avoid a drone coming at them or attempt to take cover.
It is assumed that a drone is not large enough to injure multiple people simultaneously or to impact an obstacle and a person simultaneously. That is, it is assumed that any energy dissipated at impact goes into one human.
It is assumed that people are not sheltered in any form, neither by walls, fences, or even clothes.
It is assumed that a person is impacted either in the head, thorax, or abdomen. These are typically the exposed body parts in most posture, and injury to arms and legs is typically not fatal.
Only fatalities are considered. That is, non-fatal injuries, including bleeding, pain, disabling injuries, and similar are not considered.
Simplifying assumptions
To be able to quantify the probability of fatal injuries we will make a number of simplifying assumptions. In future work these might be detailed, replaced, or altogether removed to achieve a more accurate quantification.
It is assumed that kinetic energy of a drone is a reasonable measure for person injury upon impact. This is a key assumption which will help introduce the mass threshold. However, it is not difficult to realize that this is a severely simplifying assumption, and future work might very well focus on removing/replacing this.
The drone is assumed to be completely rigid and not deform upon impact. All deformation occurs in the tissue, and as such the dissipation of energy is in the person only.
While most drones are equipped with exposed rotating propeller(s) or rotor(s) we will assume that they do not constitute a lethal threat nor contribute to the injury.
A drone can either impact through flight speed or through ballistic speed. The latter typically occurs for rotary winged drones when propulsion is lost and it moves solely through the influence of gravity and wind. While a falling drone might attain high speed, in this work the assumption is that impact occurs at the top flight speed of the drone.
Probability of lethal incidents
The ultimate goal is to determine a mass such that it is improbable for a drone below this mass to inflict fatal injuries to any person under any circumstance. Obviously it is not possible (on the long term) to completely avoid fatalities, and it would therefore be reasonable to accept a fatality rate in the same order of magnitude as manned aviation. This is a widely accepted concept termed equivalent level of safety.27,58,59
Different sources report different fatality rates for manned aviation, but they general range from
The probability can be quantified as a product of a series of probabilities




Short description of the factors in the probability equations and the ranges used in this work.

Injury mechanics
The following is a paraphrased and ‘drone-adapted’ description from Cooper and Maynard 62 and Cooper and Taylor 63 of mechanics of person injury for a non-penetrating impact: A rapid inward displacement is the primary mechanical response of the body wall to the loading of an impacting drone and this is the principal factor responsible for the transfer of energy into the body and the production of internal injury. The maximum displacement produced and the velocity attained in the early stages of the motion are the primary parameters for the extent of the injury. Subsequent to impact and the following rapid deformation of the body wall the drone will have negligible rebound velocity and the body wall returns only very slowly to its original shape. The drone simply distorts the body wall and falls down. That is, the thoracic or abdominal wall is not acting like a spring being compressed and then releasing the kinetic energy back to the drone. The lack of significant rebound velocity shows that the body is highly damped or ‘viscous’. This is a significant observation in that for a system having an elastic and viscous behaviour (viscoelastic), the displacement upon impact loading is velocity dependent. The faster that a viscoelastic material is deformed, the more resistance it offers (it becomes stiffer). This behaviour is broadly similar to that of a car suspension; a slow push will depress the suspension but the shock absorber stiffens the suspension to severe blows during driving. Thus, the type and severity of internal injury is dependent not only upon the magnitude of the distortion of the body wall but also upon the velocity at which distortion occurs.
Importance of drone design
The human torso can withstand rather severe compressions without sustaining significant injury. In fact, as much as 50% reduction in body dimensions can be sustained in the direction of the applied force, provided that the peak velocity of the distortion occurs at least 50 ms after impact. Conversely, high velocity distortions occurring at least 10 times faster can produce severe internal injury even with body wall distortions of only 3–4 cm. 62 This means that temporal extension of the impact is very important, and that prolonging the period of energy dissipation can greatly reduce the severity of the injury. Therefore, if a drone is designed in such way that it takes a long time (i.e. more than 50 ms) for the impact to peak, typically by having a compressible front area, it can be acceptable from a safety perspective to allow much higher kinetic energy than for a completely rigid construction that resembles a bullet when impacting.
Non-penetrating drones
The injuries sustained by the human body are rather different for skin penetration and for crushing (non-penetrating) impacts. Skin penetration typically occurs with high kinetic energy density (high energy on a small impacting area), and in this work we will assume that the drones are designed such that the kinetic energy density is sufficiently low so that penetration will not occur. However, this is not always the case, for instance if a carbon fibre frame from a multicopter impacts a person in the head where the skin is thin and there is no deformation of underlying tissue. It should be noted that the resulting bleeding is rarely in itself lethal.
Kinetic energy threshold
The injury mechanics described above suggests that deformation velocity of the tissue is the primary factor in the severity of an impact injury. But the fact that this velocity depends on properties of the impacting object as well as the impacted region on a human it is difficult to suggest a single-parameter threshold. However, some methods do exist that can be used to estimate
Debris impact criterion
In Range Safety Group Risk Committee 25 it is concluded that a 25 ft–lb (33.9 J) threshold is applicable for avoiding fatal injuries (AIS level 4, Abbreviated Injury Scale 64 ) from debris impacts. This is in turned derived from lethality curves by body parts presented in Feinsteain et al. 42 To avoid serious injuries (AIS level 3) altogether an 11 ft–lb (14.9 J) threshold is recommended. This lower threshold for determining injuries from falling and explosion debris is also found in the FAA Flight Safety Analysis Handbook Federal Aviation Administration. 65 These two thresholds are to be interpreted as 1% threshold meaning that the probability of sustaining a AIS level 3/level 4 injury is 1%. The AIS level 3 and 4 injuries have in themselves a 10% and (up to) 50% probability of being fatal, respectively. 47
VC criterion
The VC value can be determined by a given kinetic energy and given velocity.
52
Assuming a thorax impact and that all kinetic energy E is absorbed in the thorax we have that

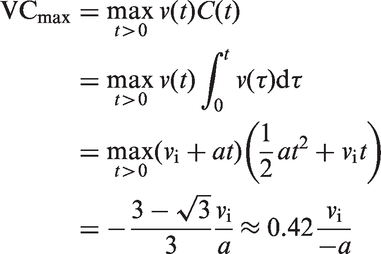
Thus, maximum VC occurs after 42% of the total impact event time, at which point 
BC criterion
The kinetic energy required for a given BC value can be determined from equation (1). According to Sturdivan et al.
66


Data set
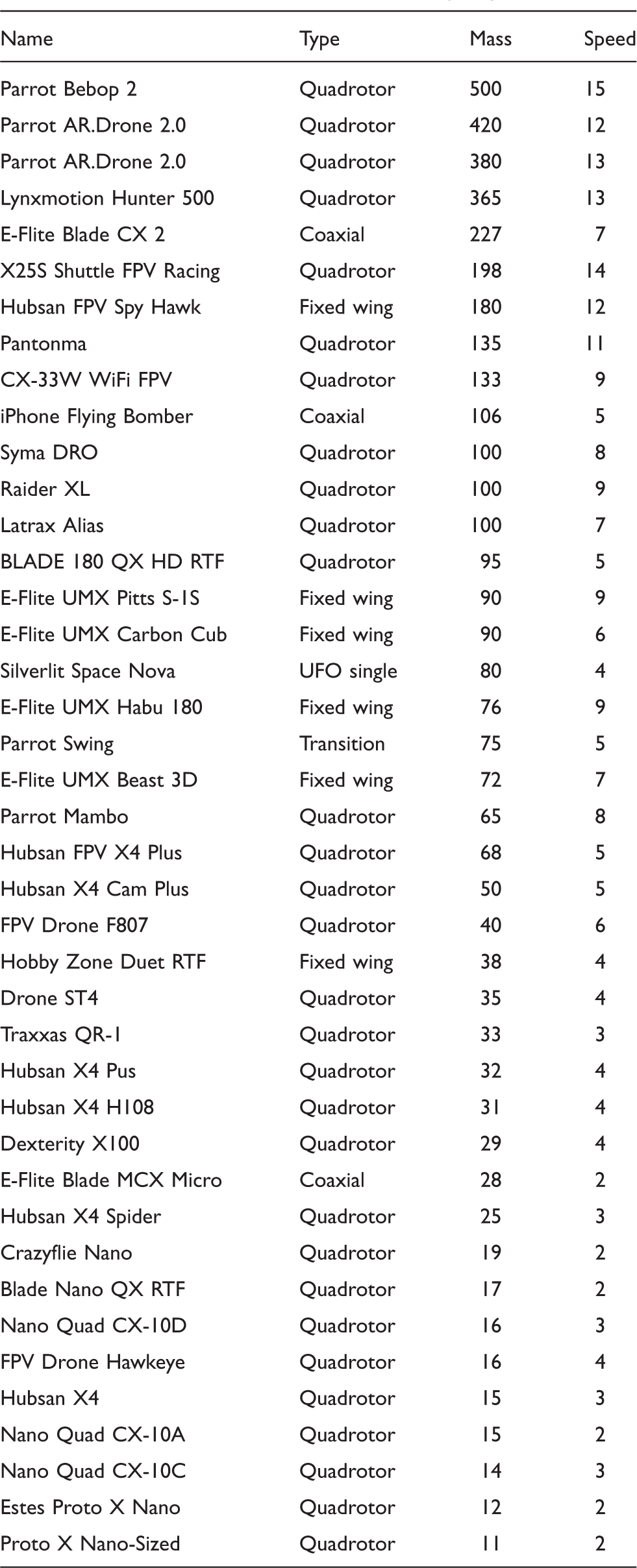
In this work the data set is a series of toy drones randomly selected from a number of vendor websites. Only drones below 500 g have been included and even very small drones are part of the set. Unlike the larger drones it is sometimes difficult to find mass (except if you actually acquire and weigh the drone), and it is often difficult to find the top speed. The drones used here all have their mass listed among the specs. Only in a few cases is the top speed listed, and it is therefore estimated based on a variety of factors, primarily commercial video of the drone in flight and the author’s first-hand experience with similar drones. It is noteworthy that small drones built for high speed flight do exist, and they can reach fairly high top speeds. Such specialized drones have been excluded from this analysis since they do not represent the majority of toy drones.
It would be preferable to use a data set that represents well the range of toy drones being sold, but such data are not readily available for the very small drones. However, if such a data set should be available is it relatively easy to substitute this into the model to produce more accurate predictions.
Modelling kinetic energy to mass relation
It is clear that especially for smaller drones there is no simple relation between speed and mass, and that any function mapping between these two parameters must necessarily be rather complicated to accommodate for all the design variables, or alternatively rather imprecise as it models only the general principle of ‘increasing mass results in increasing speed’. Note that such a simple model may still be quite accurate despite its imprecision. The lack of precision in a more simple model can then be captured by assuming a distribution around the model value. This is exactly what was done in Fraser and Donnithorne-Tait
13
where a power model



List of 41 drones used as data set. The names are as found on vendor website at the time of compiling the list.
Results
Kinetic energy threshold
Unfortunately, there is no simple measure for a kinetic energy threshold that can be applied directly to drones. Consequently, we adopt the approach of other works that focuses on injury from debris as well as the VC and BC criteria, and consequently use kinetic energy. Various sources report varying thresholds for injury; we decided to use some of the more well-documented sources. As a result a kinetic energy threshold at 25 J is selected, and the assumptions are that this threshold provides a
The sources reporting the above stated thresholds focus on debris and fragments from various incidents, such as explosions and other violent occurrences. These fragments tend to be small and with high velocity (and thus having a high kinetic energy density), and the method used for deriving the thresholds would therefore tend to give a higher threshold value when applied to drones. For this work we will therefore use an intermediate kinetic energy threshold of 25 J as the 1% threshold for AIS level 3 injuries, which in turn has 10% probability of being fatal.
For a 25 J drone impact the VC criterion in equation (7) gives 
From kinetic energy to mass
The relation between mass and kinetic energy depends on the velocity (squared), and therefore in order to establish a mass threshold it makes sense to compare the mass and velocity parameters for a series of typical drones. Only propelled top speeds are considered and not terminal velocity of free falling drones. It is reasonable to expect that the velocity of drones, in general, increase with mass, i.e. larger drones tend to have higher top speeds than smaller drones. We also expect that it makes sense to talk about ‘typical’ drones, i.e. 10 g drones tend to have top speeds around, say, 2 m/s, and 100 g drones tend to have top speeds in the range 5–10 m/s, say. Under these two assumptions we can establish the probability that the top speed will be within certain limits for a given mass by deriving the stochastic properties of a sample set of typical drones.
The drones in the data set have been plotted in Figure 1 using a log scale on the mass axis (first axis) and a linear scale for speed. Each dot represents one drone. It is the assumption that the relation between mass (m) and propelled top speed ( Mass versus top speed for the drone in the data set. The solid red curve is the power model, and the three dashed red curves are the 

In the figure the three dashed red curves show 1, 2, and 3 times this standard deviation (
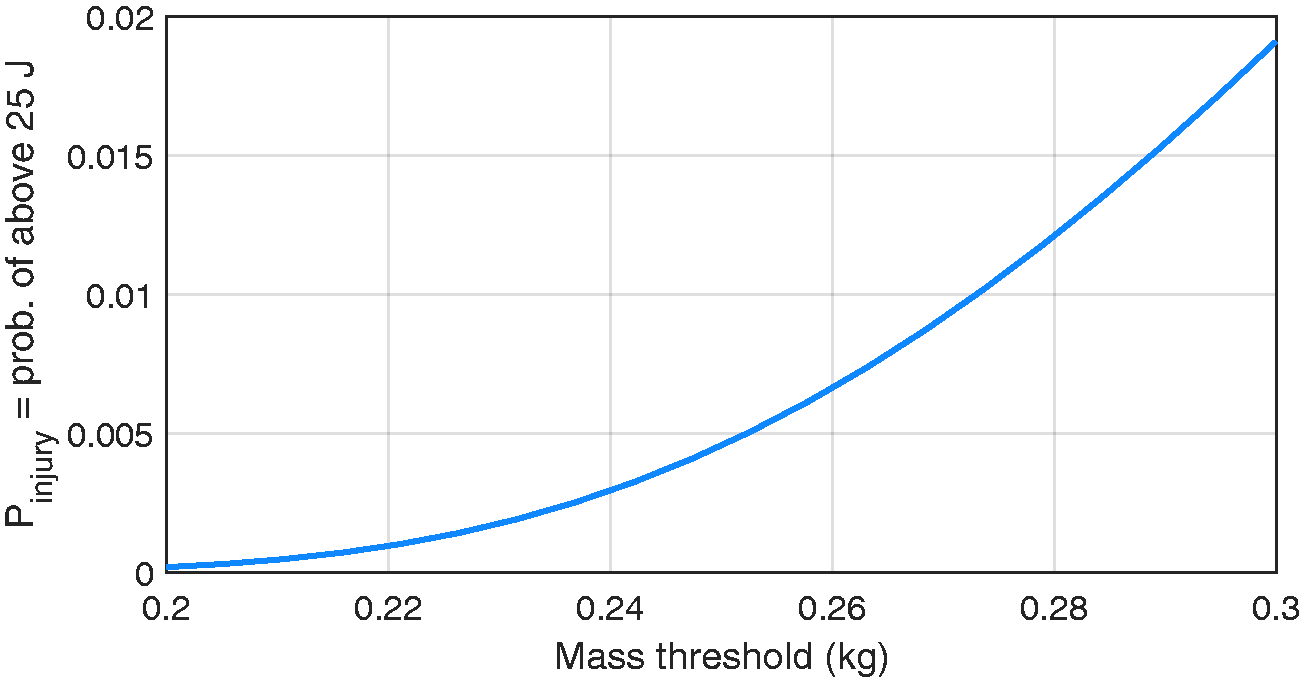
The probability Probability for a drone to be below the mass threshold and above the 25 J kinetic energy threshold. Injury and fatal injury probabilities for selected mass thresholds.

Mass threshold
Examples of estimated probabilities for a number of scenarios. The first four are for drones with masses with uniform distribution on a log scale between 0 and the given mass, while the last four are for drones at the given mass.

The values used in the scenarios may arguably be different in a lot of circumstances, and it is easy for the reader to substitute different values to accommodate other scenarios. In particular, the reliability of the drone, expressed as
It is important to note that
The values in Table 4 indicate that a mass threshold of 250 g will provide a sufficiently low fatality rate to match a
Discussion and future work
This work recommends a mass threshold for ‘harmless’ drone to be 250 g. This recommendation is based on a long series of estimates and assumptions, many of which may be altered to achieve a higher or lower threshold. Some estimates are somewhat uncertain and could benefit greatly from more in-depth investigations, and some assumptions could be argued to be either very conservative or overly optimistic as they are based on indications from other literature or extrapolated from existing data to a perhaps unreasonable extent. As such, further work might reveal a different recommendation for a mass threshold.
Uncertainties
In order to produce an actual and well-founded recommendation, a number of assumptions were made and probabilities were derived based on literature rather than statistics from actual flight. This introduces some degree of uncertainty in the final result, but hopefully the probabilities throughout this work have on average been sufficiently conservative to warrant a useful result. To aid future work the following is a short discussion on some of the key questions that one could ask.
What is the reliability really of a drone?
The best way to learn the reliability of a particular drone is to fly it. To achieve a reasonably good statistical basis the drone should be used in a typical context and flown for sufficiently many hours to have a statistically significant result. Even for smaller drones with a high error rate (
In this work we rely on estimates based partly on estimates for somewhat larger, though still hobby-like, drones, and partly immediately observable reliability of existing toy drones. In Table 4 the smallest drones are estimated to experience an error every 6 min of flight. The reasoning is that such small toy drones experience both pilot errors and mechanical malfunctions all the time. For the largest drone (up to 400 g) we expected that on average there will be an error every 1–2 flight hours. It stands to reason that the pilot only makes few mistakes (disregarding an initial learning period) with more expensive drones and that drones of that size are significantly more mechanically and electronically reliable.
How likely is it actually that a person is hit by a drone?
In this work the density of people on the ground is the only factor in the probability equation to account for the probability of impacting a person when a drone is crashing. And the probability is fixed at 2–6%, a fairly conservative estimate for most scenarios. This value indicates a ‘loose’ gathering of people without a specific event (like people in a park one Sunday afternoon), a scenario that certainly is realistic, but also often grossly conservative. Further, one could argue that most intelligent pilots would fly their larger drones at unpopulated areas until they are relatively comfortable with its operations and reliability (after a software upgrade, for instance). However,
On top of this the basic assumption is that people are unaware of the drone crashing, and therefore do not attempt to avert the drone using arms or legs, cover their face or chest with their arms, take a crouching or prone posture, or indeed avoid the drone altogether. For situations where only people that are directly or indirectly involved in the flight (pilot and spectators) this is rather conservative, but for situations where a broader gathering of people are present, such as a city streets and event crowds, one might expect the majority of people to be completely ignorant of the presence of the drone. In this case the person density is presumably a good measure of the impact probability.
Is the data set representative?
For this work only a small sample set of drones is used, and as such the uncertainty in the joule to mass relation is relatively high. A bigger data set containing a wider variety of drones might reveal different results and push the mass threshold either way. However, this is only true if drones with different top speeds than those used are added to the data set. That is, more drones with higher top speed (relatively independent of mass) would decrease the recommended mass threshold. That is, if smaller drones are predominant in the market, and a representative data set therefore would contain more smaller than larger drones, this would not in itself change the recommended mass threshold even though the average drone would be fairly small.
The top speed of smaller drones can be difficult to determine without actually measuring it during flight (using, for instance, a radar or a camera system). Some drones do have a top speed value specified, but since top speed is a relatively uninteresting property for most smaller drones, this specific value is often either missing or (probably) estimated by the manufacturer or the vendor. This work would certainly benefit from a more thorough investigation into the actual mass and top speed relation, but it is hard to do without actually acquiring a significant number of drones and conduct the necessary test flights.
What about mid-air collisions?
Aviation regulation today does not permit unmanned aircraft (at least not the kind that are of interest here) to operate in non-segregated airspace. This is done by requiring drones to stay below a certain altitude limit, typically 100 m or 400 ft. While this indeed separates drones from the vast majority of manned aviation, there are still very low altitude activities such as military aircraft and search and rescue helicopters. Evidently there is a risk of mid-air collision between a drone and a manned aircraft, and there is arguably a significant probability of a fatal outcome from such a collision. However, the mass of the drone is of little significance in such accident scenarios since even the smallest drones could cause significant damage to a high speed aircraft or if ingested into a turbine engine.13,25 Therefore, to avoid such accidents operational restriction is much more effective than a mass threshold.
Alternative threshold
It is quite obvious that the shape of an impacting object is crucial and that there is great potential for designing drones for which a threshold much higher than 25 J would be appropriate. However, rather than having a dynamic kinetic energy threshold it would probably be better to have a restriction on the ‘lethality’ of a drone by imposing a threshold on the deformation velocity of a human body that a given drone can inflict. While this is indeed somewhat more difficult to determine than the mass of a drone (and certainly beyond the skills of any person acquiring a drone from a toy store for recreational purposes) it is nonetheless possibly for professional drone manufacturer to demonstrate that their particular drone design is likely to not cause tissue deformation velocities beyond a given threshold. A recommendation for such a threshold and how to stay below it is beyond the scope of this work.
Regulatory use
The 250 g threshold is a compromise between numerous conflicting interests and as described above not really a good measure for the lethality of a drone. But from a regulatory point of view such a simple and easily measurable threshold is straightforward to both implement and enforce. This means that it can be used for regulating the use of drones for the general population, without having to resort to more difficult measures such as top speed, kinetic energy, design, etc. The ‘harmless’ category fits well into a larger framework of classifications of unmanned aircraft, where the ‘harmless’ category naturally will have the least restrictions, possibly even very few restrictions, to allow people to legally fly recreationally without any knowledge of aviation regulation. Numerous national aviation regulators as well as the European regulatory processes have adopted the concept of a harmless category, although the threshold for category varies greatly. A few, including Denmark and EASA, are considering the 250 g limit as an appropriate value.
In order for the recommended threshold to apply, it is important to observe the assumptions listed previously. Many of these will fit quite well with the intentions of regulatory bodies, for instance the assumption that people are not prepared for a drone impact. Other assumptions might require limitations in the permitted use of ‘harmless’ drones. For instance, the assumption on people density in the three scenarios might lead to the requirement that a drone cannot be operated directly over crowds of people. And the assumption that the toy drones are representative for the average use, thus disregarding some small subsets of all acquirable drones (such high speed specialized drones), might lead to an additional requirement that high speed drones are exempted from the ‘harmless’ category.
Future work
There is a whole plethora of future work to be done within the subject of drone-inflicted injuries. Numerous topics have been indicated above and it is easy to imagine several more. For this author the focus will be on a much better knowledge of the value of
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.