
Abstract
This paper discusses the role of the inertial properties in the design and selection of the softball bat, and their interrelated effects on female softball swing mechanics and bat performance. The study was performed using 14 collegiate subjects whose swings were analyzed via a computer model, which included methods for estimating post-impact ball velocity. The model was driven kinematically by subject swing recordings using two different trial bats with markedly different inertial properties. Using this method, the following information was determined: subjects altered their linear kinetic inputs while applying consistent angular kinetic inputs to maintain nearly consistent trajectories; subjects compensated for increased bat inertia by modification of the bat instantaneous center-of-rotation trajectory (ICR); and swing trajectory influenced the bat’s inertial feel, actual, and ideal impact locations, and batted-ball velocity. Subsequently, the mass properties of 27 collegiate level bats were input into the model for each subject trial. Using this information, the relative changes in kinetic inputs were quantified and the performance of the bats was estimated. Results showed that bat inertial properties varied considerably, and independent manipulation of individual properties was evident. In addition, subject kinetic inputs and bat performance measures were most affected by changes in mass center (CG) location, mass, and CG inertia. A modified definition of IGRIP based upon the ICR was presented, and practical implications for designers and practitioners were offered based upon these findings.
Introduction
The design of softball bats has been ongoing since the inception of the game. 1 Bat design has rapidly evolved due to the infusion of new technologies, materials, and design tools. The results are lighter, stronger, and more durable bats that promise greater potential performance. 2 Modern softball bats are offered in a variety of sizes, lengths, weights, and materials that result in considerable ranges in inertial properties. 3 Commercial interest in bat design and performance is important since softball is one of the most popular sports in the United States, 4 especially for females who participate competitively at the high school, collegiate, and professional levels. 5
Bat inertia properties (mass, CG location, and inertia tensor) have the most significant effects on both batting effectiveness, 6 and batter swing mechanics, effort, and feel. 7 Bat inertia properties can be described by three values: mass, CG location and CG inertia. Often, bat inertial properties are summarized and quantified about a point near the handle (IGRIP) according to the methods specified in ASTM F2398. 8 This quantity assumes a fixed point-of-rotation of the bat. 9
The inertia properties of the bat either individually, collectively, or in some combination affect the swing trajectory, kinetic inputs, bat linear velocity, bat angular velocity, bat kinetic energy, ideal impact point, energy transferred during impact, batted-ball speed, and impact feel. 6 The difficulty arises in attempting to isolate and quantify the relationships among the three fundamental mass properties, their possible combinations, and the collection of effects they influence. These properties of the bat present an interesting study in compromise in the selection process. The batter seeks a balance among bat speed, ease of control, pitch zone coverage, energy transfer at impact, and feel of the impact. These capabilities are all affected by the mass, mass center location, and inertia characteristics of the bat. 10 Changing one of these parameters may improve some quantities, while diminishing others. 11
Little research has been performed on the mechanics of the female softball swing,5,12–14 and the relationships among swing mechanics and bat properties.9,15 However, much information exists about the inertial properties of the softball bat.3,16–18 Fleisig et al. 2 and Smith et al. 13 found that bat linear velocity had a significant correlation with bat moment of inertia (MOI), but not bat mass. Koenig et al. 19 found that bat speed was dependent upon the inverse of bat MOI. Fleisig and Koenig included female subjects in their studies, however, only Koenig considered them independently of the composite group of subjects. These studies were experimental in nature, however, Koenig included dynamic modeling in an effort to support the experimental results. His model was limited by assuming a single degree-of-freedom (DOF) for the bat/batter system, planar bat motion, and fixed point-of-rotation through the center of the batter. Information relating softball bat inertial properties to swing trajectory characteristics, batter/bat interaction forces, torque, work, power, and bat performance for female participants does not exist.
This paper presents the effects of bat inertial properties on female softball swing mechanics and estimated bat performance for college level participants using an unrestricted three-dimensional rigid model of the bat. This model was applied to a large sampling of subjects and bat configurations in an attempt to discover where differences in swing style and bat inertial properties revealed themselves in the kinematic and kinetic quantities and bat performance measures. Alternate measures of bat grip point inertia and center-of-percussion were introduced that incorporated subject swing characteristics into these quantities.
Methods
All subjects in this study were informed of the purposes of the study and gave written consent for the use of their data for research purposes in accordance with local IRB requirements.
Swing dynamic model
A three-dimensional model of the softball bat was developed to determine the mechanics of the swing motion, interactions between the subject and the bat, and energy transfers between the two. Figure 1 illustrates the free-body-diagram of the bat model with the global coordinate system and local bat (B) coordinate system indicated.
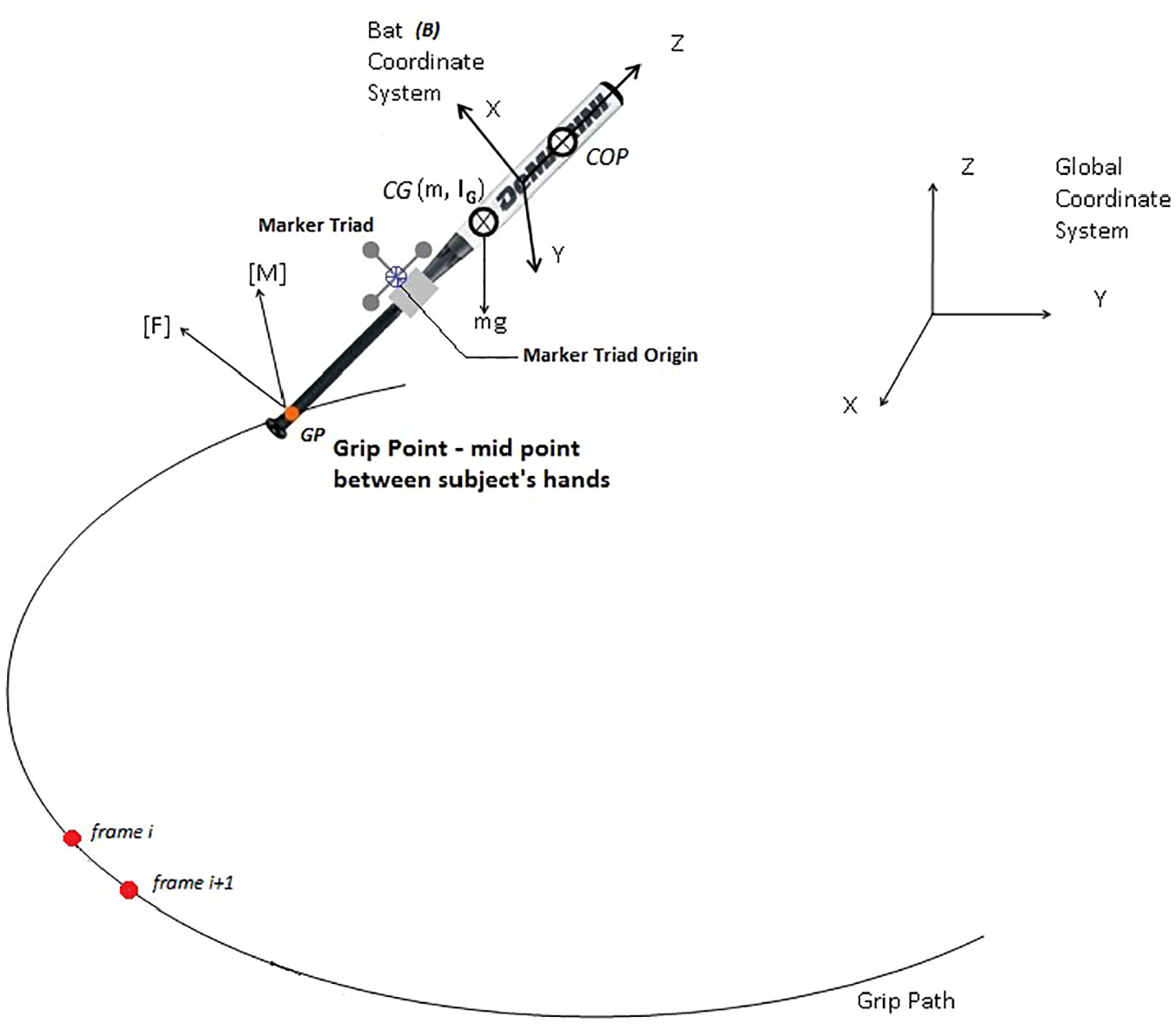
Free-body-diagram of softball bat.
[F] and [M] represent the three components of the interaction forces and moments, respectively. CG is the center-of-mass, COP is the center-of-percussion, and GP is the grip point where the subject grasps the bat. The following equations-of-motion (equations (1)–(6)) were developed from Figure 1:






where FXG, FYG, and FZG are the applied global force components, M is the mass of the bat, AXG, AYG, and AZG are the global linear acceleration components of the bat mass center (CG), g is the acceleration of gravity, MXB, MYB, and MZB are the applied moments relative to the local bat coordinate system, IX, IY, and IZ are the mass moments of inertia about the bat mass center relative to the bat coordinate system, ωXB, ωYB, and ωZB are angular velocities relative to the local bat coordinate system, αXB, αYB, and αZB are the angular accelerations relative to the local bat coordinate system, RG is the location of the mass center, RGRIP is the location of the grip point (GP). Both RG and RGRIP were measured along the Z axis of the local bat coordinate system relative to the end of the bat. FXB and FYB were the applied force components relative to the local bat coordinate system.
Data to kinematically drive the model were obtained from subject swings. An eight-camera motion capture system (Motion Analysis Corporation, Cortex V1.0, Rohnert Park, CA, USA was used to collect and process data. The system tracked a triad of passive-reflective markers that were placed on the bat (see Figure 1). The marker paths were recorded at 200 Hz and then data were smoothed using a single application of 5-point rectangular sliding-average methods. Then, data were processed to yield global body 1-2-3 angular positions of the bat (
The total work done by the subject on the bat was determined from equation (7):

where i is an index over frames (see Figure 1), and the
Bat performance
Methods by Nathan,21,22 which were developed for baseball bat-ball impacts, were used to estimate bat performance based upon post-impact ball velocity, relate bat inertial properties to bat performance, and locate the optimum impact location on the bat since no methods have been developed for softball bats related to female swing mechanics. This method separated the rigid-body behavior and associated parameters from the elastic behavior (coefficient-of-restitution (COR) function). The rigid-body development was independent of bat type (baseball vs softball), and included the three bat inertial properties of mass, mass center location, and mass center moment-of-inertia (MOI), as well as ball and bat speed and masses (masses treated as constants). Elastic properties were summarized in the COR function, which were assumed to be the same for all bat configurations and materials. This assumption isolated the mass properties from the bat/ball elastic properties, resulting in an elastic-independent bat performance assessment that was a function of bat inertia properties, impact location, and swing mechanics only. The effects of local and global elastic behavior of softball bats and the bat/ball impacts for female participants were beyond the scope of this study, however further study is warranted. A summary of the methods from Nathan’s study that were used in this study are presented here.
Collision efficiency (eA) is defined as the ratio of the post-impact (final) to pre-impact (initial) ball speed. Final velocity of the ball (vf) can be found from the collision efficiency by the following expression shown in equation (8):

where vball is the pre-impact or pitched ball speed and vbat is the velocity of the bat at the impact location just before impact. Collision efficiency and COR are related as shown in equation (9):

r is defined as the ratio of softball mass (mball) to effective bat mass (meff) as shown in equation (10):

For a free bat, the effective bat mass is shown in equation (11):

where z is the impact location along the bat, RG is the mass center location, and IG is the mass center MOI about the swing (x or y) axis. The mass of the ball was 188.2 g (collegiate regulation) and the pre-impact velocity of the ball was 26.8 m/s (average collegiate pitch speed 5 ).
The coefficient-of-restitution (COR) function encompasses and summarizes the elastic properties of the bat and ball, 23 the relative velocity of impact, and the location of impact along the bat. 24 A third order polynomial was fit to the profile of Figure 2 from Nathan 25 to account for impact locations between each bat’s respective CG location and end (Figure 2). This function was scaled to each bat, and estimated bat performance was determined at the point on the bat that yielded the largest post-impact ball velocity (ideal impact location).
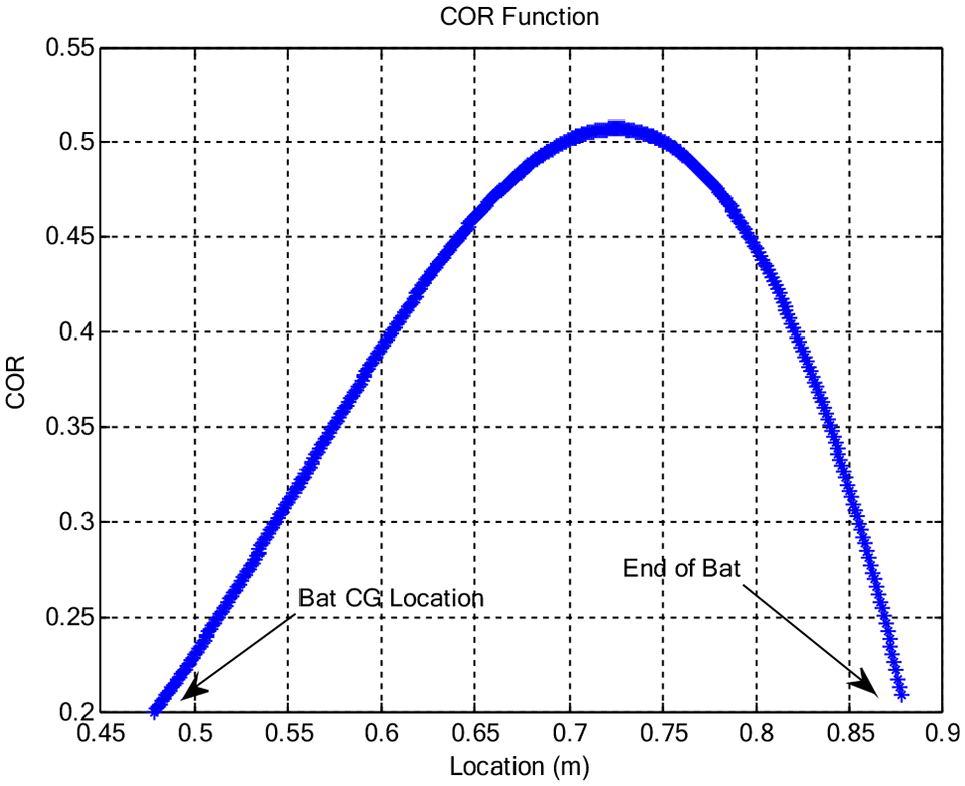
Coefficient-of-restitution (COR) Function.
Bat inertial properties
For this study, a total of 27 softball bats were selected, including only aluminum and composite materials, since these types of bats are predominantly used in women’s fast pitch softball. 17 This group of bats represent a typical set that could be available for a female college level competitive team. 5 The bats were measured for mass, mass center location (CG), and mass center inertia (IG) using the apparatus, methods, and calibrations described in Nesbit and Serrano. 26 From these quantities, the static grip point inertia (IGRIP) values were calculated using the protocols specified in ASTM F2398 (see Table 1).
Bat inertial and calculated properties.
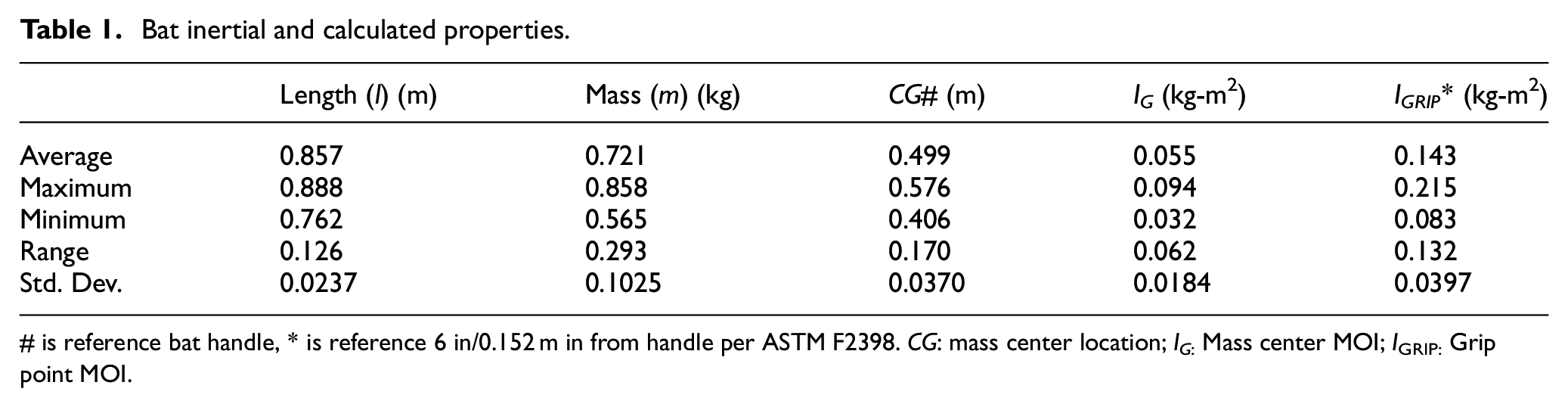
# is reference bat handle, * is reference 6 in/0.152 m in from handle per ASTM F2398. CG: mass center location; IG: Mass center MOI; IGRIP: Grip point MOI.
A graphical means of representing the bat inertial properties is shown in Figure 3. Each circle represents a single bat. The relative size of the circle indicates the value of IG, whereas the color indicates the value of IGRIP. Each bat is represented by its x-coordinate (CG), y-coordinate (m), and circle size (IG).
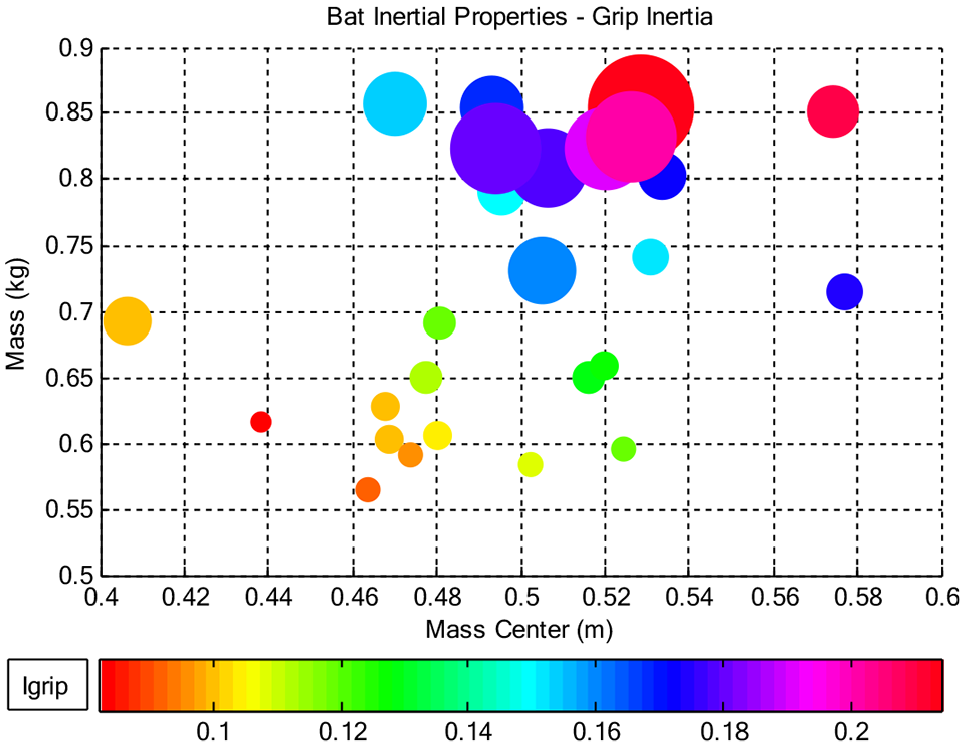
Graphical representation of bat inertial properties. IG: mass center MOI; IGRIP: grip point MOI; value of IG is proportional to diameter of circle.
As can be seen in both Table 1 and Figure 3, there are relatively wide ranges for the inertial properties of the softball bat, which agrees with results from the study by Russell. 3 Though there was considerable overlap between the properties of the aluminum and composite bats, generally the aluminum bats had higher IG values (larger circles in Figure 3) and larger CG locations values (more to the right in Figure 3). Further discussion on the effects of material type on bat properties is beyond the scope of this study. For this group of bats, the average inertial properties were significantly lower than for comparable men’s softball bats and baseball bats,3,17,19 however, the percent ranges are similar. The average and range of values for IGRIP and COP follow similar trends. No quantitative comparisons are offered since no studies identifying representative women’s softball bats were found in the literature.
It also appears from Figure 3 that the mass, CG, and mass center MOI could be varied somewhat independently, though the heavier bats generally had higher mass center MOI. These interpretations are evident through the following observations:
The size of the circle (IG) was independent of location on the X-axis (CG location).
The size of the circle (IG) was to some extent independent of location on the Y-axis (mass).
Thus, it appears that it may be possible to achieve a specific set of independently selected mass properties (once identified) through inertially constrained design methods that best suits the swing characteristics and desired performance for the female softball participant.
Subjects and testing protocol
The subjects included 14 female college level players of various experience (12.3 ± 4.4 years), height (1.65 ± 0.06 m), and weight (62.4 ± 7.8 kg). The subjects were a combination of left-handed and right-handed. No effort was made to quantify skill level.2,12,13,19 The subjects stretched and warmed up in accordance with normal protocols.2,13 The motion capture system was calibrated until the combined 3D residual for all cameras was less than 1.00 mm. The subjects were asked to execute a series of “competitive effort” swings that consisted of hitting a ball placed on a batting tee into a net. 19 Tee height was chosen by the subjects. The grip point (GP) location was measured for each swing trial (see Figure 1). A marker was placed on the ball to determine the time of impact.
Two distinct bats from the composite group of Table 1 with markedly different inertial properties were used for the subject trials (see Table 2). The mass properties of these two bats are consistent with bats used in other studies,2,16,19 yet appear to differ widely from each other when compared to the ranges of typical bats. 3
Inertial and calculated properties of trial bats.

#: reference bat handle; *: reference 6 in/0.152 m in from handle per ASTM F2398 CG: Mass Center Location; IG: Mass Center MOI; IGRIP: Grip point MOI.
Eight trials were recorded for each subject for each bat. Poor trials, as reported by the subject for uncomfortable swing, poor flight of the ball, etc., were disregarded, and the trial repeated. At the conclusion of the trials, the subjects assessed (approved/rejected) each swing trial based upon an overall visual assessment of the motion capture data. In addition, all subjects were assessed for consistency of linear velocity for each bat type. For the majority of subjects, all their respective trials were within ±10% of their respective mean velocity for each bat, which is typical for hitting a ball off a tee. 19 All subjects presented at least three usable trials within ±5% of their respective mean velocity. From these remaining trials, one was selected by each subject for each bat for subsequent computer analyses. This manner of filtering and subsequently selecting typical and representative trials for computer modeling analyses is practical and effective, and consistent with similar initial biomechanical modeling efforts in other sports. 20
Results
Subject swing velocities and interaction kinetic data
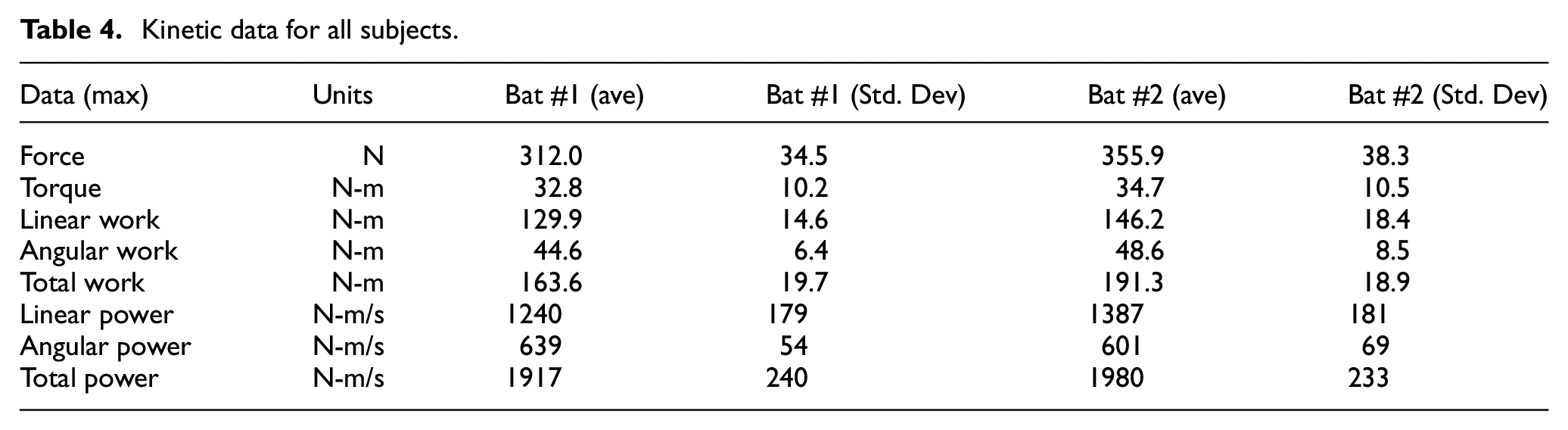
All data reported in Tables 3 and 4 are maximum values that occurred at or prior to impact. The average and standard deviation of the linear and swing angular velocity data are given for all subjects and both trial bats in Table 3. The bat linear velocities are presented as magnitudes for the grip point (GP) and CG. The average and standard deviation for subject/bat interaction force, torque, work, and power for all subjects are given in Table 4. The interaction forces and torques are presented as magnitudes. Work and power are presented as total values, while linear and rotational work are presented as components. These data are consistent with reported data. 9
Maximum pre-impact linear and swing angular velocity data for all subjects.

CG: mass center location.
Kinetic data for all subjects.
Swing trajectories
Overhead two-dimensional views of four random subjects swinging bat #1 are shown in Figure 4(a) to (d). Each frame represents 0.01 s. The red and blue paths represent the ends of the bat, the green path is the grip point (GP), and the black path is the bat instantaneous center-of-rotation (ICR). In all figures, the single hollow blue circle is the pre-impact position of the ball, and the solid red-blue dot is the global origin. Figure 5 shows the same swing perspective for Subject 9 using both trial bats. Figure 6 shows an overhead perspective view of the grip point (GP) (red), CG (blue), and bat instanteous center-of-rotation (ICR) (black) paths for Subject 9 using bat #1.
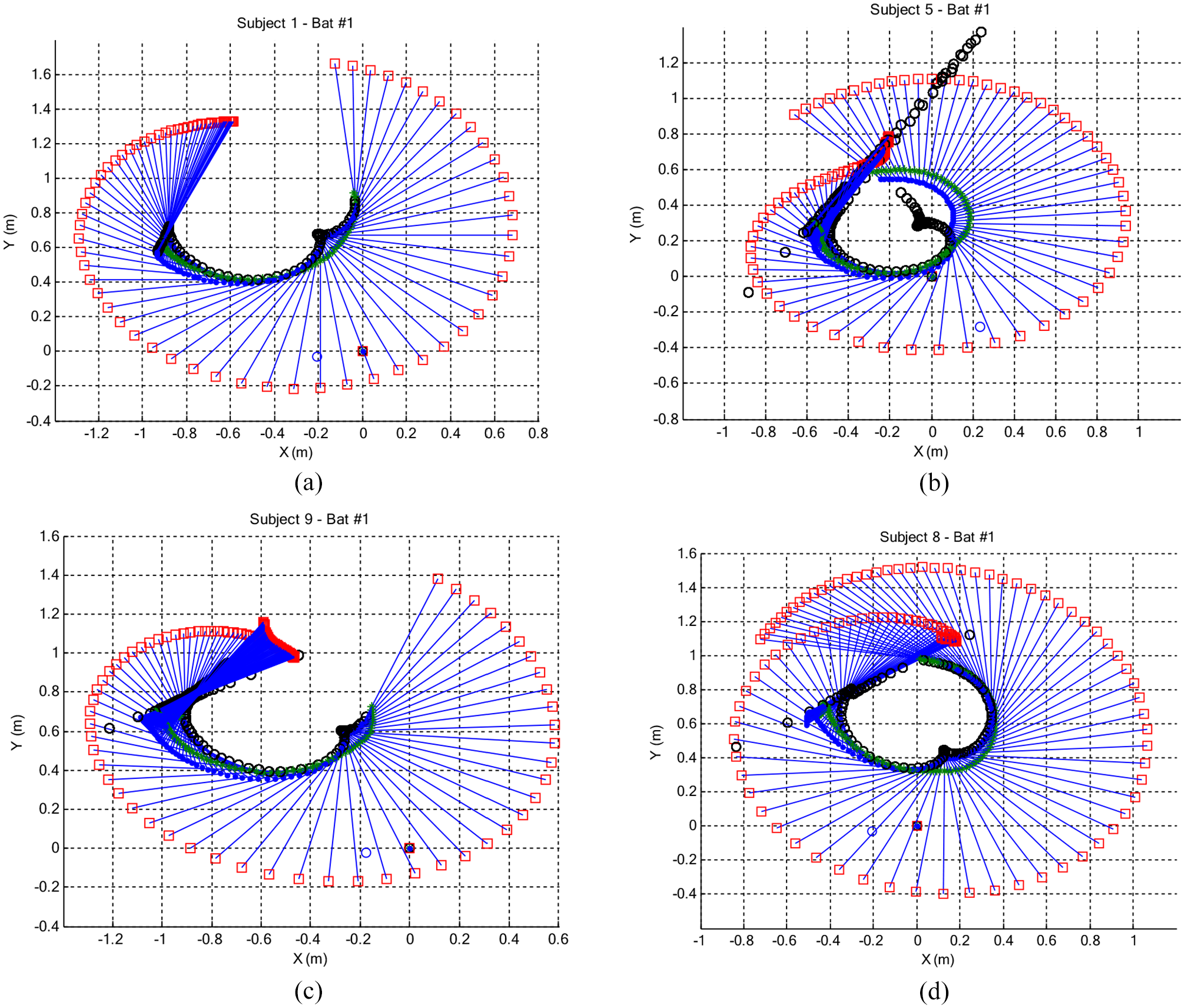
Perspective view of random subject swings using bat #1: (a) Subject 1, (b) Subject 5, (c) Subject 9, and (d) Subject 8.
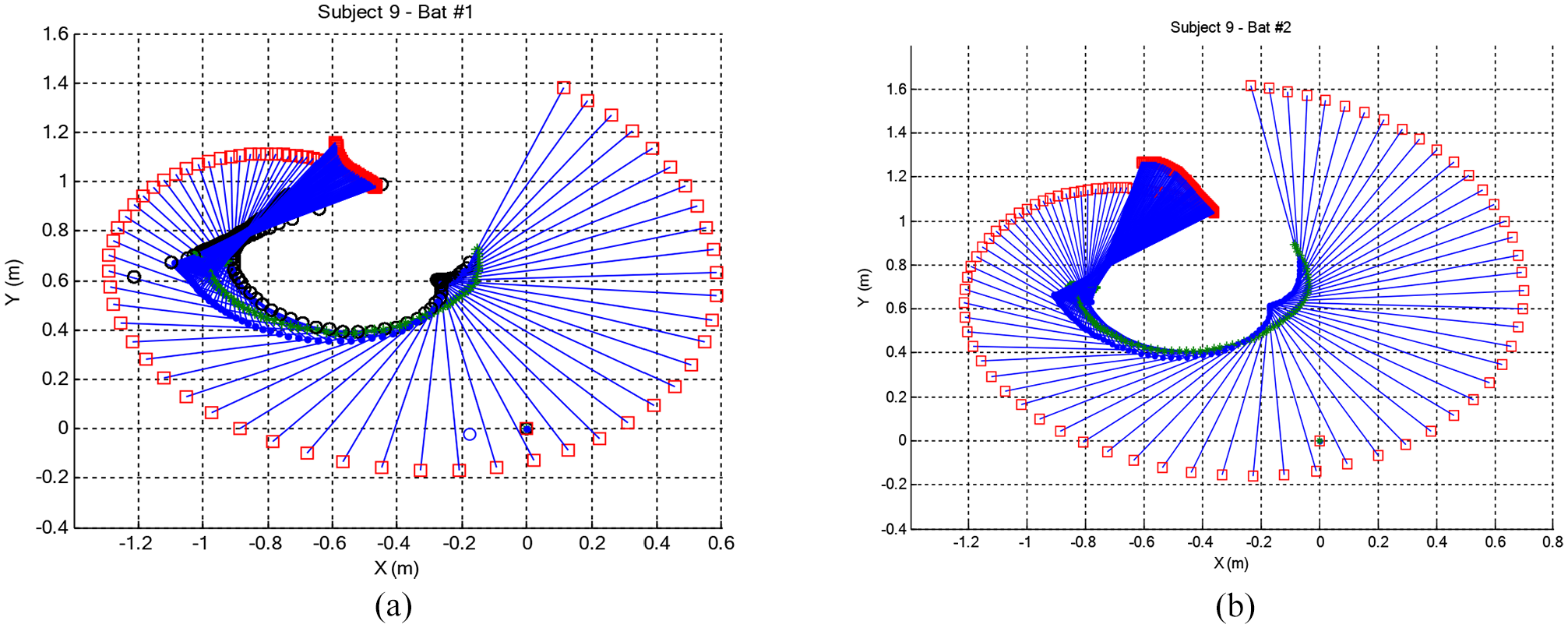
Comparison of trial bats for subject 9.
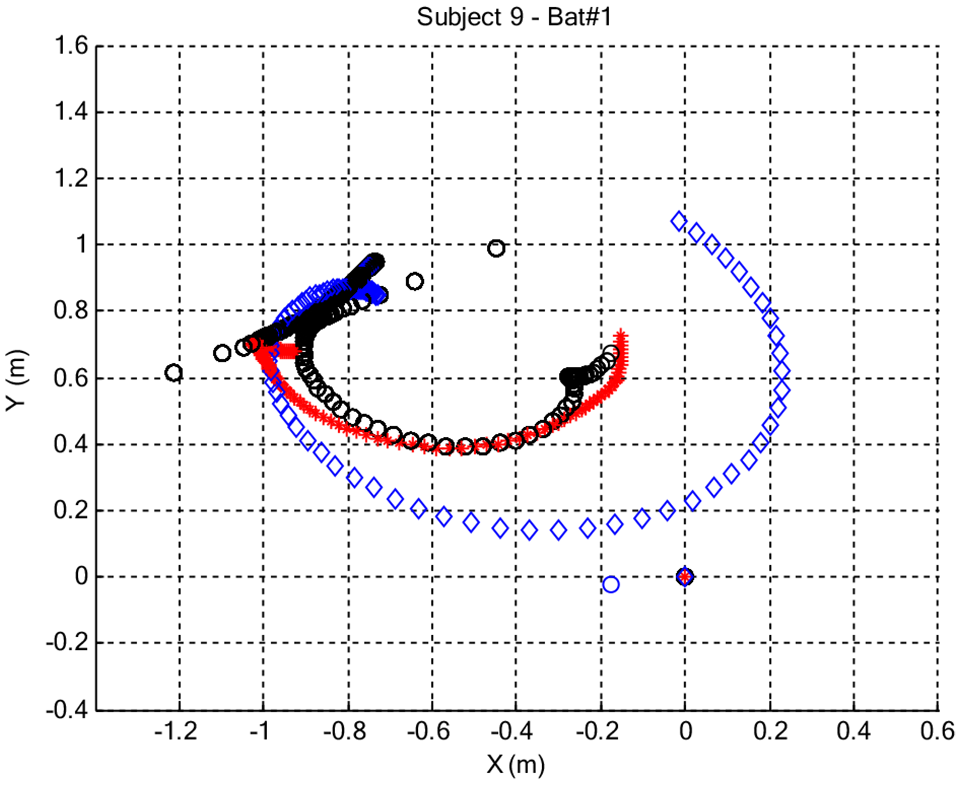
Overhead perspective of grip point (red), CG (blue), and bat ICR (black).
Static and dynamic IGRIP
A modified definition of IGRIP is presented, which is based upon the actual location of the bat ICR (dynamic) versus a fixed point on the bat (static). Dynamic IGRIP (also IICR) was determined in the swing plane from the parallel axis theorem using IG about the swing axis and the distance from the ICR to the mass center (CG). The swing plane for frame i (ICR for frame i) is defined as the plane containing the grip point (GP) and mass center (CG) for frame i, and the mass center (CG) for frame i + 1. Inertia ratio is the ratio of the dynamic/static values of IGRIP, and is shown graphically in Figure 7 for random subjects using bat #2, and for Subject 9 using both bats.
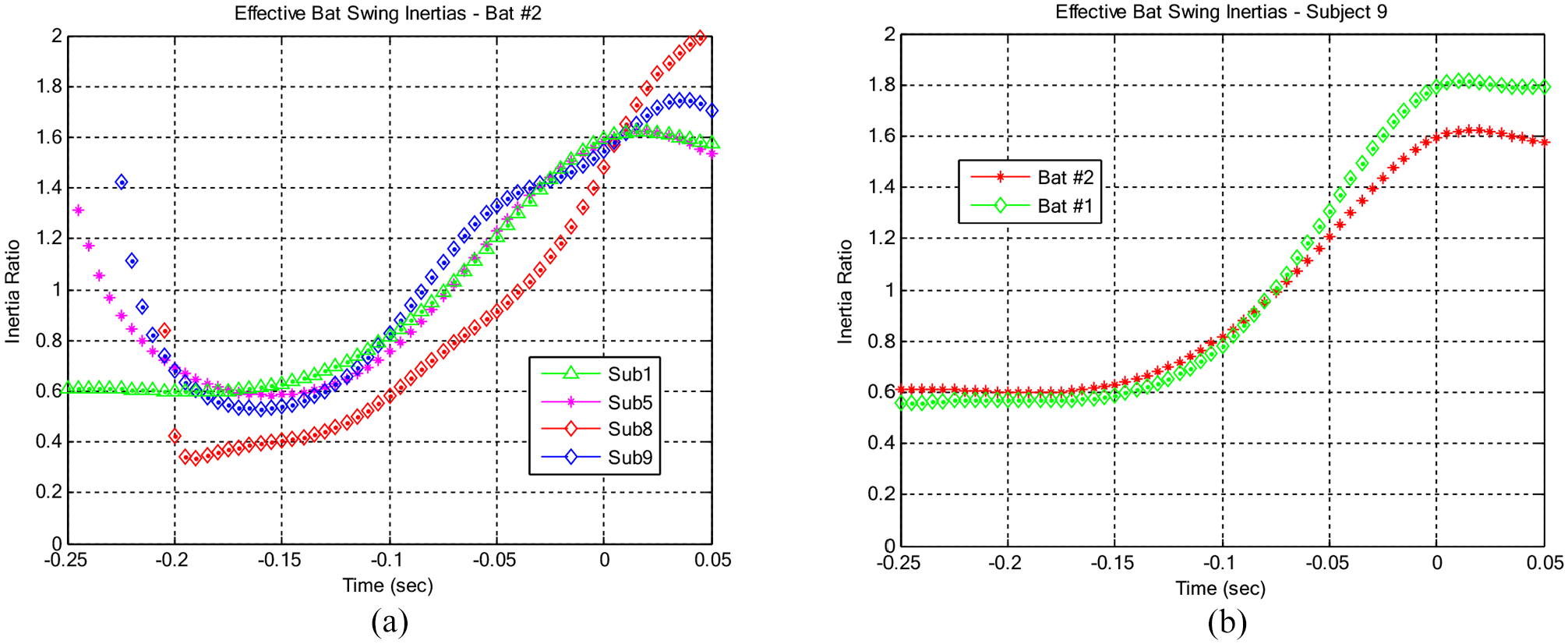
(a) Inertia ratio for random subjects for bat #2 and (b) Inertia ratio for subject 9 for both bats (Impact occurs at time = 0 s).
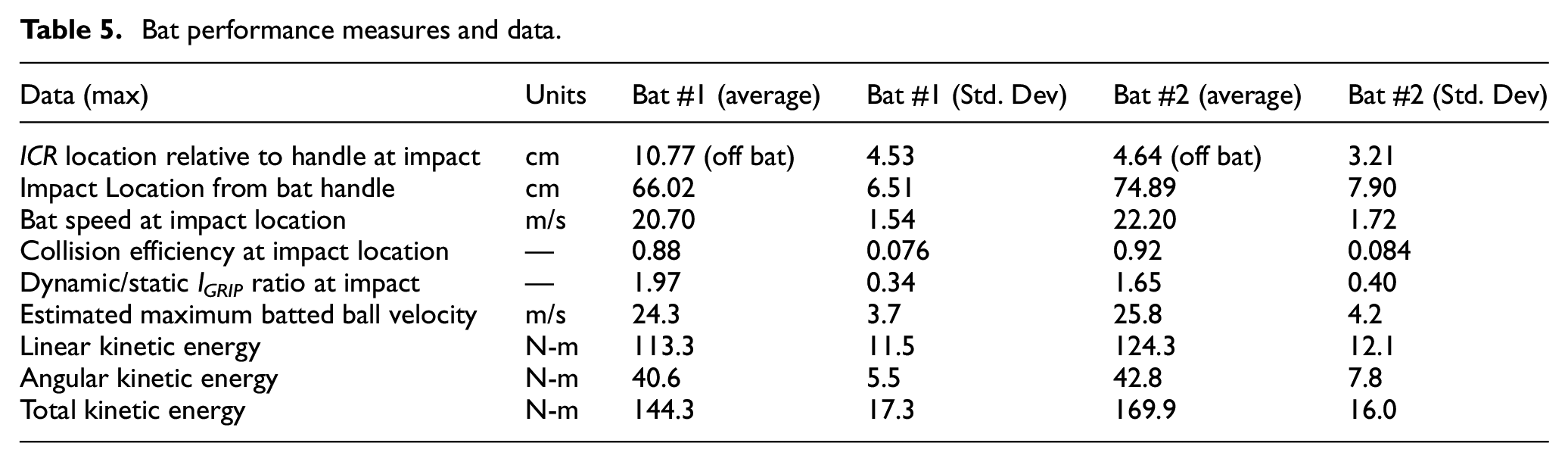
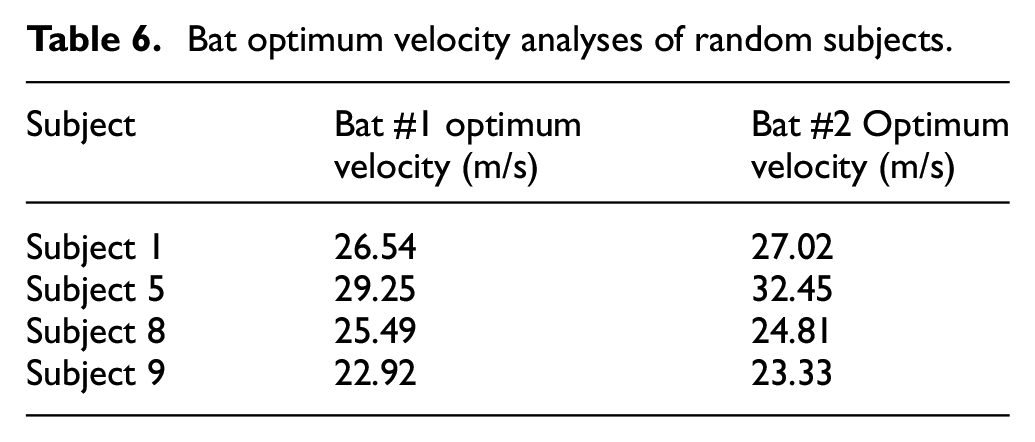
Bat performance measures, data, and estimates
Bat performance measures and data are given in Table 5 for all subjects and both trial bats. All values in Table 5 are reported at impact with the exception of kinetic energies (total, linear, and rotational), which are pre-impact maximums. The estimated maximum batted-ball velocity is based upon impact at the ideal bat location as defined by the methods of Section 3.2. Table 6 presents the estimated batted-ball velocity for impact occurring at the ideal locations for random subjects for both trial bats. The location of the ICR of the softball bat is consistent with findings from Smith et al. 13 Messier and Owen 12 report a total bat kinetic energy of 270 N-m for a female softball swing, which is considerably higher than the average maximum value found in the present study. The remaining bat performance measures in Tables 5 and 6 are not reported in the scientific literature.
Bat performance measures and data.
Bat optimum velocity analyses of random subjects.
Effect of bat inertial properties on interaction kinetic inputs and bat performance
The inertial properties of each of the 27 bats were input into the two bat trial swings for each subject. The subject’s swing trajectories for each trial were maintained, and the effect on the kinetic inputs and bat performance measures were determined. These effects are illustrated for Subject 9 in Figure 8 for bat #1. The independent inertial property variable is given as a percent of the value relative to bat #1. Figure 9 presents the relative effect of inertial properties on the estimated post-impact ball velocity for Subject 9 for bat #1. Note that in Figures 8 and 9, an arrow identifies the same bat selected for discussion purposes.
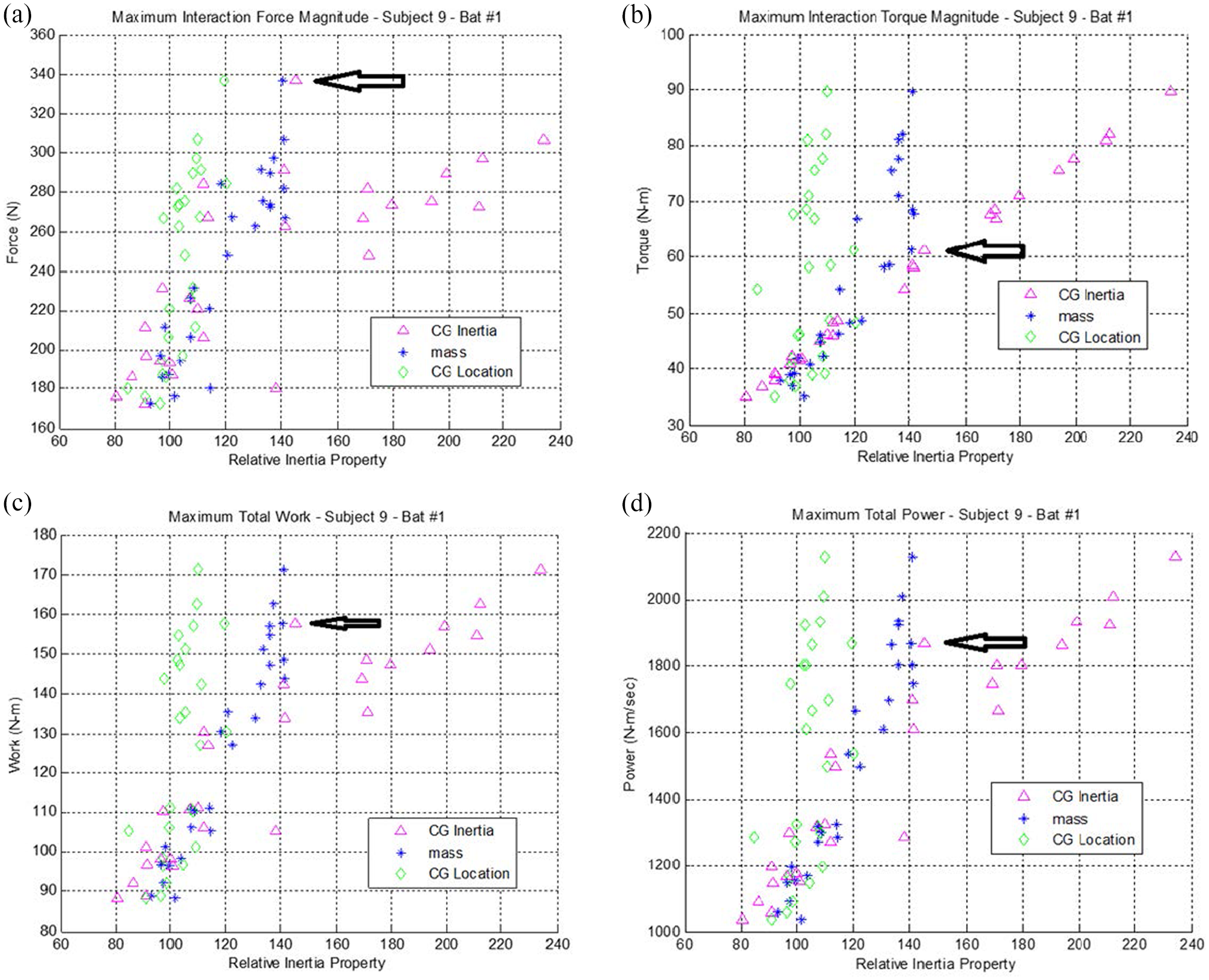
Kinetic inputs versus relative bat inertial properties for subject 9 (Bat #1), CG– mass center location: (a) maximum interaction force magnitude, (b) maximum interaction torque magnitude, (c) maximum total work, and (d) maximum total power.
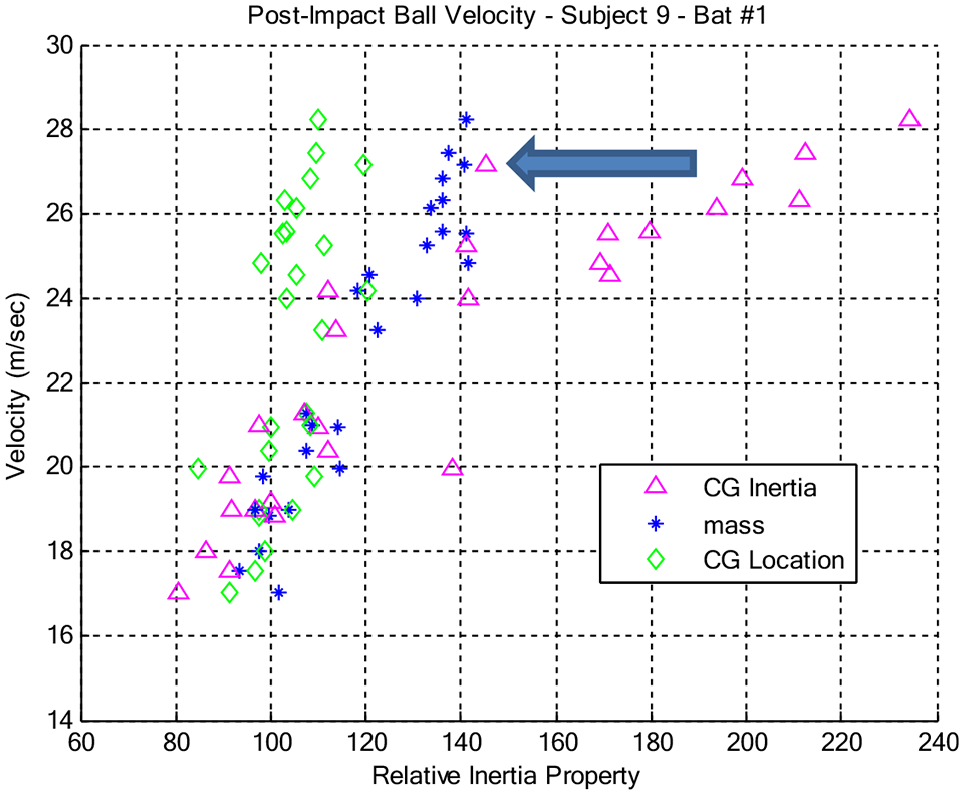
Post-impact ball velocity for subject 9 (Bat #1), CG: mass center location.
In Figures 8 and 9 a horizontal line that intersects the three relative inertial properties was associated with a particular measured bat (Figure 3). Each bat can be uniquely identified based upon the relative horizontal spacing of the properties and intersects its associated kinetic input/ball velocity on the left vertical axis. For example, bat #1 used by Subject 9 had mass, CG location, and IG values of 0.606 kg, 0.480 m, and 0.040 kg-m2, respectively (see Table 2). One of the 27 measured bats substituted into the trials had mass, CG location, and IG values of 0.848 kg, 0.576 m, and 0.057 kg-m2, respectively, or 140%, 120%, and 143% of the mass, CG location, and CG inertia, respectively, of bat #1. An arrow at the top of Figure 8(a) identifies this particular bat, which corresponds to a maximum interaction force of 338 N for this subject’s trial. This bat is also identified by arrows in Figure 8(b) (maximum interaction torque of 61 N-m), Figure 8(c) (total work 158 N-m), Figure 8(d) (peak power 1870 N-m/s), and Figure 9 (maximum batted-ball velocity 27.2 m/s). For this bat applied to the trajectory of Subject 9 from trial #1, the relative required interaction force is (relative to the kinetic inputs for bat #1) 338/190 N, interaction torque 61/42 N-m, total work 158/95 N-m and peak power 1870/1160 N-m/s. The resulting bat performance is an estimated post-impact ball velocity of 27.2/21.0 m/s. From this information, the potential cost/benefit and suitability of this bat for this subject can be assessed. These projected ratios are only slightly trial dependent since most subjects maintained consistent swing trajectories within the range of inertial properties presented in Table 2.
Discussion
Effect of bat type on swing trajectories, bat velocities, and bat ICR
Figure 4 illustrates that the female softball swing is a complex and subject dependent motion. Relative to the aims of this study, the path of the grip point (GP) and bat ICR were all of non-constant radius, moving relative to each other, and exhibiting considerable variability in size, shape, and radius profile among these subjects (see Figure 6). For a particular subject, it was often difficult to visually distinguish the trajectories from trial-to-trial when using the same bat, and between the two trial bats (see Figure 5), however, bat dependent differences in swing mechanics were evident. Table 3 reveals that the average maximum grip point (GP) linear velocities for all subjects were nearly identical between bat #1 and bat #2. The maximum values of the swing angular velocity were slightly lower for bat #2. This was offset by the higher values of RG for bat #2 (see Table 2) which ultimately resulted in slightly higher CG velocities for bat #2. This similarity of the linear velocities is surprising noting that the inertial properties of the two bats (including static IGRIP) were quite different. This finding agrees with Koenig et al. 19 An important and typical finding relative to the two trial bats on a subject’s trajectory can be seen in Figure 5. The trajectory of the hands (blue), which is an important component in controlling the outward movement of the bat, 9 is generally consistent for the two trial bats and thus appears independent of bat inertial properties. However, the path of the bat ICR (black) moved much closer to the path of the grip point (GP) when the subject used the more inertially substantial bat #2. Thus, the manner in which the subject attempts to control the outward movement of the bat remains consistent, while the movement of the bat ICR closer to the path of the hands for bat #2 indicates that the subject may have been adjusting (reducing) the effective or dynamic inertial resistance of the bat in an effort to maintain the fundamental trajectory within their respective kinetic input limitations (see discussions below). The location of the bat ICR at impact (Table 5) was greatly affected by the different inertial properties of the respective trial bats.
Effect of bat type on interaction kinetic inputs
Referring to Table 4, it appears that these subjects reacted to the different trial bat inertias by a variety of kinetic modifications, which resulted in comparatively consistent trajectories as described above. For the composite group, the maximum linear interaction forces were higher for bat #2, whereas the maximum interaction torques were similar between trial bats. In terms of input energy, the subjects did more total work, linear work, and applied greater linear power to bat #2, which resulted in higher linear kinetic energies for this bat (Table 5). The angular work, total power, and angular power were fairly consistent between the trial bats, which yielded consistent angular kinetic energies between the trial bats (Table 5). It appears that the subjects adjusted their linear input quantities (force, linear work, and power) apparently in response to different bat inertial characteristics. This finding implies that female batters may have reserve capacity to increase their linear kinetic and energy inputs to maintain their characteristic swing trajectories.5,9,27 However, the subjects maintained consistent angular input quantities (torques, angular work, and power) and total power independent of the significant differences in bat inertias. This finding implies that female batters are possibly applying their maximum angular kinetic energy and overall power capacities for both trial bats, which may illuminate limiting input kinetic capacities of the subjects.5,9,27
Figure 8 shows the interaction kinetic inputs required to produce a kinematically identical swing when substituting different bats. All quantities, force, torque, total work, and total power were most sensitive to relative changes in mass center location, followed by mass, then mass center inertia. This relative effect holds for all subjects, and the swing trajectories for both trials. Based upon the range of inertia properties of the measured bats, the potential range in all kinetic values is considerable and most likely would exceed the capacity of the subjects at some point, resulting in altered swing trajectories for some of these bats. This highlights the importance of proper bat selection relative to the inertial properties so as not to exceed the capabilities of a batter in attempting to maintain consistent swing trajectories.
Dynamic IGRIP or IICR
Calculating the value of IGRIP relative to the actual bat ICR trajectory reveals interesting features about subject swing mechanics and the reactions to changing bat inertial resistance. 11 Referring to Figure 7(a), the IICR varied considerately during the swing and was both subject dependent and bat dependent. During the initial phase of the swing, the relative value of IICR depended upon the initial position of the bat and how the subject initiated the swing. After initiating the swing, the value of IICR stayed fairly low because the distance from the bat CG to the ICR was lower than to the grip point (GP) (see Figure 6). As the swing progressed and the bat CG moved away from the batter, IICR increased rapidly and reached maximum near impact as the ICR moved progressively closer to the batter and further from the bat CG relative to the grip point (GP). This modulation of the bat grip point (GP) inertia during the swing trajectory both aided in facilitating the outward movement of the bat (smaller relative inertia), and extracting/transferring energy to the bat near impact (larger relative inertia).
Figure 7(b), which shows the inertia ratio profiles for one subject swinging both trial bats, reveals how a typical batter may adjust her swing trajectory and resulting IICR value (quantified as inertia ratio which is defined previously) in response to the higher static inertia of bat #2 relative to bat #1. In general, it appears that subjects reacted to the higher bat inertia through a modification of bat ICR between the swing trials with the two bats to control the value of the inertia ratio. The limit in subject interaction torque capacity may contribute to this effect. 5 For example, during the majority of this subject’s swing, the inertia ratio was the same for both bats, which reflects a relative modification of the bat ICR between the two swing trials. As the swing progressed, the inertia ratio of the individual bats started to increase rapidly. The subject continued to respond by moving the trajectory of the bat ICR for bat #2 closer to the hand path compared to bat #1 to reduce its inertial resistance or IICR value, thus decreasing the relative difference in IICR values between the two bats. The resulting ratio of IICR values at impact for the two bats was 1.13 versus a ratio of static IGRIP values of 1.86. The data suggest that an interaction between the ICR path and inertia ratio was occurring. Thus, there appears to be some feedback mechanism to inertially equalize the two bats, or at least limit the difference within bat means across subjects. For all subjects (Figure 7 and Table 5), the average ratio of dynamic/static IGRIP ratio at impact was 1.97 for bat #1 and 1.65 for bat #2.
Effect of bat inertial properties on bat performance
Table 5 shows that the bat #2 trials yielded higher estimated batted-ball velocities, and higher total and linear kinetic energies relative to bat #1. Angular kinetic energies were nearly equal between the two trial bats. Thus, the inertially more substantial bat was generally more effective in generating higher batted-ball velocities10,24 and extracting more energy from the batter. The higher mass and inertia of bat #2 relative to bat #1 resulted in higher batted-ball velocities, as evident from equations (7)–(10). Coupled with the subjects’ general ability to maintain consistent linear velocities between the two bats, it would appear that bat #2 would be advantageous for all subjects. However, this higher potential of bat #2 does not apply to all subjects, and is not as great as the relative difference in inertial properties would imply because of the moderating effects of subject swing trajectory characteristics (specifically the relative ICR’s of the two bats). However, on an individual batter basis, the results are more conflicted. 6 For example, for the four random subjects of Figure 4, three of the subjects had higher ideal impact velocities for bat #2, while one had higher ideal velocity for bat #1. The inconsistent results for identical bats illustrate that the ideal impact location may also be a function of the batter’s swing trajectories, 24 or more specifically the path of their ICR. This is counter to other methods that identified the impact location based upon the static properties of the bat and fixed locations with the exception of Brody 28 who reported that for fast-pitch softball, the optimum location (maximum power point) increased as the ratio of bat angular velocity to bat linear velocity. Referring to Figure 9, the relationships between the bat inertial properties and post-impact ball velocity showed the same relative effects, where performance were most sensitive to changes in mass center location, followed by mass, then mass center inertia.
Bat selection and design
The importance of proper bat selection based upon inertial properties is clearly demonstrated from the data presented in this study, both in terms of required effort to swing and potential batted-ball velocity. This study of a set of “typical” softball bats used by female batters revealed not only the extensive range of individual inertial properties, but also the resulting combinations and associated summary values (static IGRIP). These findings confirmed the thinking that in terms of inertial properties, no ideal bat exists, only potential ideal bats for individual batters. 7 With that in mind, how does a particular batter select the ideal combination of properties beyond the current trial-and-error process? Assuming batters have some means for recording and analyzing swings, and measuring or obtaining bat inertial properties, the authors offer the following suggestions based upon the findings presented in this study:
Provide explicit bat inertial information to the batter (mass, CG location, IG, and IGRIP) numerically, graphically on the bat (CG location), and in the form of Figure 3. 29
Provide information in the form of Figures 8 and 9 to the batter based upon her particular swing trajectory and bat used to determine cost/benefit of relative inertial changes.
Include the location of the bat ICR in the assessment of proper bat inertial properties selection.
Record and analyze swing trials to assess effects of bat selection on swing trajectories and bat ICR profiles.
The authors feel that considerations of bat inertial properties are more important relative to the swing resistance and resulting swing trajectory than bat performance. The batter is best served if the maximum bat inertial properties do not adversely affect their swing and/or move the bat ICR toward the bat and away from the batter. This suggestion is supported by House 30 and Adair 31, and qualified by Bahill, 16 who identified limits for the individual player.
The results of this study suggest that it is important to consider the inertial properties as separate and (mostly) independent quantities, and that independent manipulations of these properties are possible. Since these subjects appear to be torque limited in their swing mechanics, the authors believe that in addition to the bat designs already offered, designs that fit in the upper left quadrant of Figure 3 with larger IG circles would be beneficial to female softball participants. These would yield bats with lower CG location values, yet higher masses, which results in relatively lower IGRIP values, and higher potential batted-ball velocities. Note that the value of IGRIP is dominated by the mRG2 term over IG. See Table 2 for the two trial bats and compare IG and IGRIP. Thus, the location of the mass center is most significant to the value of IGRIP. This may explain why it appears that IG contributes little to IGRIP.
Conclusions
The goals of this study were to describe the inertia characteristics of typical bats used by female fastpitch collegiate softball participants, assess the methods used to summarize its inertial resistance, measure the effects of bat selection on swing mechanics, estimate the relevant bat kinematic and bat/batter interaction kinetic quantities as a function of bat inertial properties, and determine the estimated bat performance measures. This information would advance the understanding of female collegiate softball swing mechanics and the interrelated effects of bat inertial properties and behaviors, areas that have received little attention from the biomechanics community. A color-based graphical scheme was introduced to visually identify and differentiate among the unique inertial characteristics of each bat. An analysis of the swing mechanics for 14 female college level participants was performed using an unrestricted three-dimensional rigid model of the bat. The subjects used inertially different trial bats, and their swing mechanics were assessed using multiple mass, CG location, and IG combinations. Methods for estimating batted-ball velocity were included as a bat performance measure.
The study highlighted the individuality of the swing mechanics of the subjects, and how the swing trajectories and kinetic quantities were both influenced by the bat inertia properties, and affected the resulting estimated batted-ball velocity. The specific relationships among the bat inertia properties, swing mechanics of the subjects, and resistance and performance of the bat are complex, and subject dependent. What was revealed from these efforts included a description of how subjects altered their swing mechanics for different bat inertial configurations, how swing mechanics affected the traditional static bat measure of IGRIP, and how the proposed dynamic values of IGRIP (IICR) were an effective alternative for quantifying ICR dependent bat inertia. The results support the importance of proper bat selection. Suggestions for better bat selection and design for female softball participants were offered based upon the results of this study. The findings and suggestions presented in this study should form the basis for further analyses of female softball swing biomechanics and help inform the process of bat selection and design for female participants.
Footnotes
Acknowledgements
We are grateful to all the participants who volunteered in this study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Funding for this project was provided in part by a grant from the National Science Foundation.
Ethics approval and consent to participate
All subjects in this study were informed of the purposes of the study, and gave written consent for the use of their data for research purposes, in accordance with local IRB requirements. Local IRB approval for this study was obtained prior to recruiting and testing of subjects.
Human and animal rights
All research procedures followed were in accordance with the ethical standards mandated by the local IRB committee responsible for human experimentation. Local IRB approval for this study was obtained prior to recruiting and testing of subjects.
Availability of data and materials
The data supporting the findings of the article is available upon request to the corresponding author (Steven M Nesbit).