
Abstract
In a cycling time trial, the rider needs to distribute his power output optimally to minimize the time between start and finish. Mathematically, this is an optimal control problem. Even for a straight and flat course, its solution is non-trivial and involves a singular control, which corresponds to a power that is slightly above the aerobic level. The rider must start at full anaerobic power to reach an optimal speed and maintain that speed for the rest of the course. If the course is flat but not straight, then the speed at which the rider can round the bends becomes crucial.
Introduction
The individual time trial is a road bicycle race, in which cyclists race alone against the clock. We use mathematical tools to determine the optimal pacing strategy of a cyclist in such an individual time trial, for which we have a relatively flat and short course in mind. The opening stage of the Giro d’Italia (Figure 1) – the prologue – through the city of Apeldoorn in 2016 is a good example. The course of a prologue can be divided into a number of relatively straight segments between bends, which the rider can round only at a limited speed. We study the optimal pacing on the straight segments as a mathematical optimal control problem. We consider the speeds at the bends as fixed external conditions, which appear in our differential equations as initial conditions. Determining the optimal speed in a bend is a challenging problem, which deserves further studies.
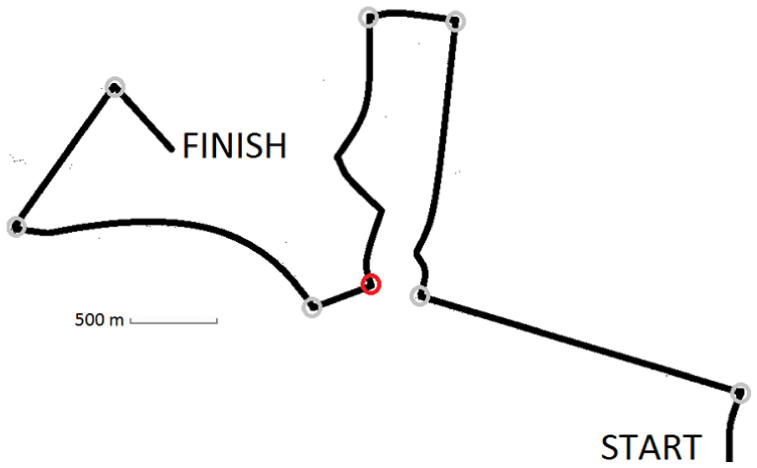
The course of the Giro d’Italia Prologue 2016 consisted of nine relatively straight segments, with lengths varying from 200 m to 2000 m. In a race like this, riders round the bends at high speed and are willing to take risks. Prologue specialists Jos van Emden and Stefan Küng slipped and fell in the bend marked in red. The surprise runner up, Primož Roglič, has a very good sense of balance. He used to be a ski jumper.
The problem of finding the optimal pacing strategy for a straight course has been studied before, see, for example, De Koning et al. 1 and Underwood and Jermy. 2 These studies compared a finite number of pacing strategies and selected the best strategy by numerical computation. In our considerations, we allow all possible pacing strategies and select the optimal strategy using Pontryagin’s maximum principle.3, 4 We have summarized our results previously. 5 This paper is an extended version, which contains the full analysis.
The mathematical model
We model the rider as a point mass moving on the line from start to finish in minimal time. The rider’s force

The rider’s power is equal to

To simplify the mathematical details of our analysis, we assume that there is no headwind. The equation thus reduces to

In this equation, the constants
Aerobic and anaerobic power
The precise measurement of a cyclist’s power remains a topic of research
7
and there exist many biomechanical models to describe it. We adopt the model of Monod and Schrerrer.
8
An athlete produces power from aerobic sources, which can be sustained for a long time, and anaerobic sources, which run out quickly and are used to reach the peak power. In the model of Monod and Scherrer,
8
the power output varies between a critical power level, CP, which can last for a time longer than the race and a peak power level
The time trial control problem: three levels of power
To apply Pontryagin’s maximum principle, it is convenient to put the problem in a different, but mathematically equivalent form. Minimizing the final time over a fixed distance is mathematically equivalent to maximizing the final distance over a fixed time

subject to the constraints
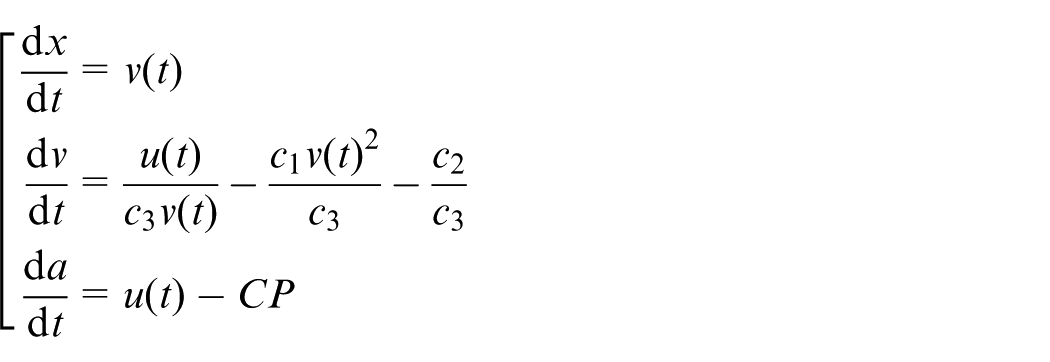
with boundary conditions
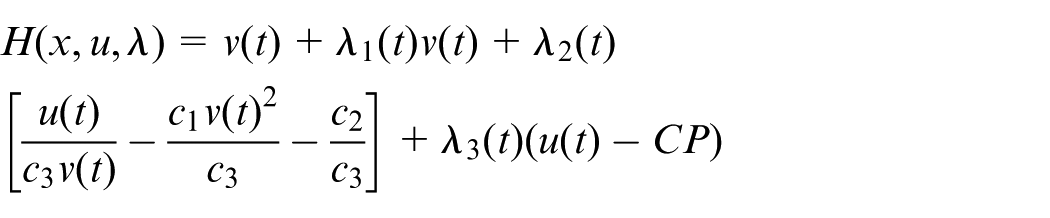
It is important to observe that this Hamiltonian is linear in
where
The parameter

where





Mathematical solution of the control problem
Our analysis will show that the rider needs to go all out at peak power at the start and aim for a velocity that can be maintained at the intermediate singular power level. Once the rider gets close to the finish, he can switch back to the critical power level and the velocity will slowly decay. Interestingly, this is entirely counter to human psychology. Any athlete will go all out once the finish line gets close. However, cold mathematical logic dictates that this is excess power, which should have been used earlier.
We need to make some straightforward assumptions to carry out our analysis. We first state them in a legible form before translating them into formulae.
The trial is not too short. It is impossible to go all out and maintain peak level for the entire trial.
The course is not too steep. The critical power level suffices to achieve a positive velocity.
The rider does not start from a standstill. The initial velocity is positive, but small.
The rider is in shape. The anaerobic power level is sufficiently high to get to a velocity that can be maintained indefinitely at critical power.
We need to introduce some further notation to make this precise. The rider can apply CP indefinitely and, doing this, will be able to maintain a certain velocity. We denote this cruising velocity
In control theory, starting at maximum power and using it all up before switching back to minimum power is called bang–bang control. In this terminology, the optimal power distribution in an individual time trial is bang–singular–bang.
If we translate our four assumptions into mathematical conditions, we get
c1 and c2 are such that
the initial velocity
the final velocity
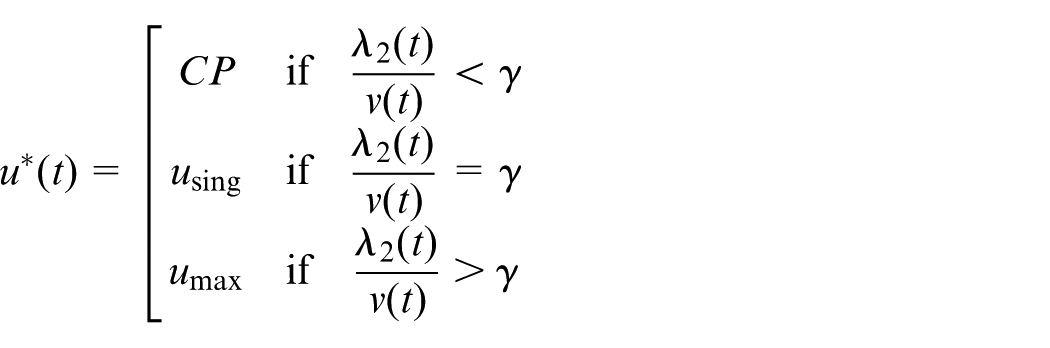
We will show that the three levels of power in an optimal pacing strategy correspond to three stages of the velocity
initial stage of peak power, when
middle stage of singular power, when
final stage of critical power, when
The singular power level
We first consider the singular power level and assume that

on a certain time interval. Both

Substituting equations (2) and (5) yields

On the time interval that we consider

hence

It follows that the velocity

Using equation (2), we find that the singular power level is equal to

The singular power level corresponds to a constant velocity. Now it seems clear that the rider needs to accelerate until reaching this velocity and sustain it at the singular power level. To prove that, we still need to show that the ratio

increases monotonically, and stays fixed at
It is optimal to finish at minimum power level
The variable

Proof. We prove that

The control variate

Proof. This can be proved by contradiction. If
These two lemmas imply that an optimal pacing strategy ends at the minimum power level CP, because the switching level is positive and the ratio λ2/v is zero at
Switching power in optimal pacing
We are considering a time trial in which all conditions are equal along the entire course. If the rider exerts a constant power in such a stationary terrain, he will eventually reach a stationary speed that is independent of his initial velocity. Mathematically, this follows from the fact that the right-hand side of equation (3)

has a unique value of
Knowing all this, it may now seem obvious that the rider starts at peak power until

and

for all
Proof. We first assume that the rider applies peak power between t′ and t″. In this case

between t′ and t″ assumes a maximum for some value of t in this time interval. At a maximum of λ2/v, the right-hand side of equation (8) is equal to zero. More specifically

Since

is positive, we conclude that

is negative. It follows that

increases with

and at time

In other words, the velocity decreases at time
If the rider applies critical power between
Proof. We already know that the rider finishes at critical power. What we need to prove now is that λ2/v crosses the critical level
We argue by contradiction and suppose that the ratio λ2/v crosses the critical level twice, or more. Crosses always go in opposite directions, so one of these crosses has to be from critical power to peak power. We know that, in the end, the rider switches back to critical power, so there must be a value of

and

in between. By the previous lemma, the velocity would then have decreased at
Example
As an example, we consider a 5 km time trial with the following parameters: initial velocity
If the rider goes all out at maximum power, then
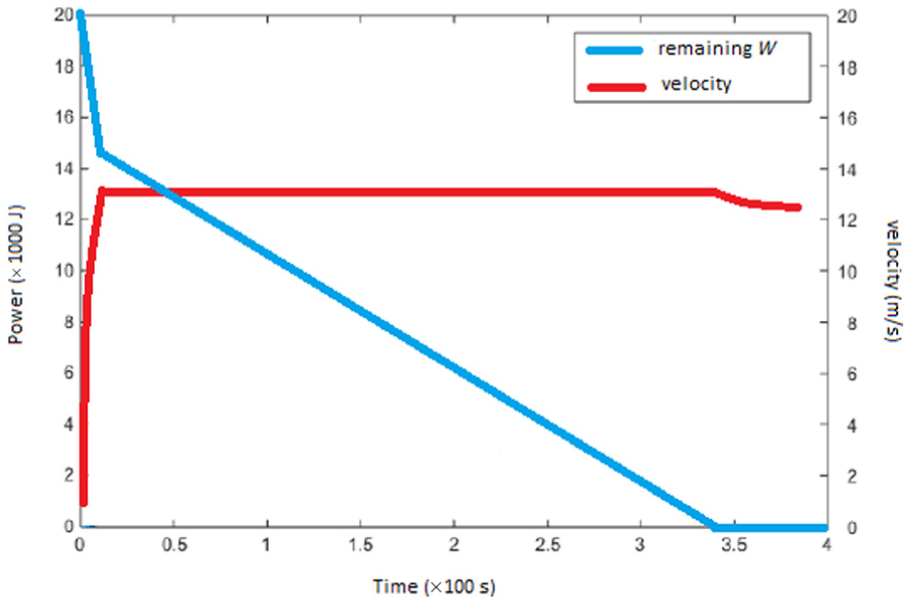
Example of optimal power output and energy distribution in a 5 km time trial. The blue line represents the remaining rider’s energy and the red line the rider’s velocity as a function of time.
In Figure 3, the switching function λ2/v, the value
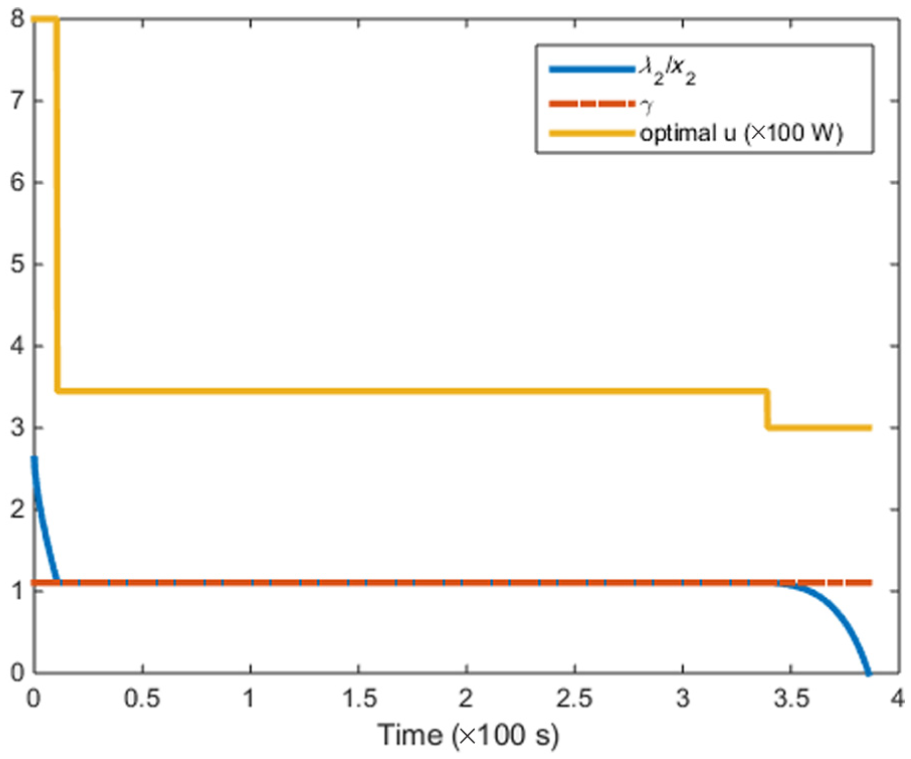
Optimal power output and energy distribution in a 5 km time trial. The yellow line represents the power output, the blue line the switching function λ2/v and the red dashed line the value
The singular power cannot be computed in a straightforward way. It can only be determined numerically. Our computations show that
Conclusions
Using only minimal assumptions, we have shown that the optimal pacing strategy in an individual time trial involves three levels of power. In an optimal pacing strategy, the rider needs to go all out at the beginning until he reaches a velocity that can be maintained for almost the entire course. The peak power and the critical power are invariant, and only depend on the athlete. The intermediate singular power level depends on the terrain of the time trial, but can be computed numerically.
In our computations, external variables such as wind velocity and slope were constants. We have chosen stationary parameters to keep our computations simple and transparent. It is possible to use variable wind velocity and slope. The computational effort remains the same.
In our model of the rider’s power model, the anaerobic reserve cannot recharge. It is not straightforward to extend our analysis to a power model that does allow such a recharge. Our analysis of the three levels of power has to be adapted; settling the mathematical details will require further study. Our analysis only applies to relatively short time trials.
In a short and flat time trial, it is crucial to round the bends at the highest possible velocity. The optimal way to round a bend in an individual time trial is important and deserves further study.
Footnotes
Acknowledgements
We would like to thank Teun van Erp and other members of the Giant-Sunweb cycling team for supplying data, selecting an appropriate power model and tuning the coefficients.
Declaration of conflicting interest
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial or not-for-profit sectors.