
Abstract
The nonlinear partial differential equations considered in this study are important in modeling complex wave phenomena extending from hydrodynamics via ocean engineering to plasma physics, fluid dynamics, and other mediums. The Rosenau equation provides an analytical solution for studying wave phenomena in many physical systems, where dispersion and nonlinear dynamics play significant roles. This equation is proposed to explain the dense dynamic behavior of discrete systems. The generalized exponential rational function method has been employed to obtain the new soliton solutions of a nonlinear wave equation in fluid dynamics. This work uses the conformal fractional derivative and the fractional wave transformation to get the analytical results. The solutions include trigonometric, hyperbolic, and exponential functions with possible representations into three-dimensional graphics showing wave dynamics. The study focuses on the nonlinear Rosenau equation, revealing wave features including dark and bright solitons, and kinks and anti-kink waves. We are examining how parameters may have their impact on stability and interactions. This work enhances our knowledge of nonlinear wave systems and their practical applications in fluid dynamics and materials science.
Keywords
Introduction
Nonlinear partial differential equations (NLPDEs) are applicable in various physical modeling scenarios. These equations are essential for understanding the physical implications of several important theories, motivating researchers to pursue their exact solutions. Numerous techniques and methodologies have been developed and employed to tackle these challenges. These include, but are not limited to, the following: the
In this paper, we try to provide analytical solutions to the Rosenau problem. We consider the Rosenau equation
24
in the form

Various numerical and analytical methods have been studied to investigate the dynamics of different Rosenau-type equations. Park
25
examined the solvability of the Rosenau equation and provided exact solutions. Atouani
26
employed a high-order conservative difference scheme to establish unconditional stability and convergence. Gao and Tian
27
applied the power series method to derive analytical solutions and further extended its use to obtain multiple exact results. Abbaszadeh and Dehghan
28
developed an element-free Galerkin approach based on two-grid interpolation for the nonlinear Rosenau regularized long-wave equation. For the Rosenau–Korteweg–de Vries–regularized long-wave (Rosenau–KdV–RLW) equation,
29
soliton and periodic solutions were obtained through the sine–cosine and tanh methods,
30
as well as via the mixed finite-element method.
31
A collocation finite-element method based on quintic B-splines was also proposed for this problem,
32
while Razborova et al.
33
studied shallow water waves using the Rosenau–KdV–RLW model. Ak et al.
34
used the subdomain technique with sextic B-spline basis functions to compute numerical solutions for the Rosenau–KdV problem. Erbay et al.
35
solved solitary wave solutions of the Rosenau equation using the Petviashvili iteration method, demonstrating robustness to initial guesses and rapid convergence. Guo et al.
36
proposed a multiple integral finite volume scheme for the Rosenau–KdV equation, showing it to be highly accurate, conservative, stable, and reliable. Chung and Pani
37
provided error estimates for the
A number of studies have developed fractional calculus methods to obtain exact wave solutions of nonlinear equations. Shakeel et al.
40
employed the modified Riemann–Liouville derivative with wave transformation to transform the fractional modified Camassa-Holm equation into an ODE, in which the new
In this work, we propose the GERF method (GERFM) as an effective approach for solving the Rosenau equation. Our aim is to extend existing results by deriving new families of analytical solutions. Using GERFM, solutions are systematically classified into distinct cases and families, offering a wider variety of wave structures than previously reported. The GERFM approach is based on transforming a partial differential equation into an ODE through a suitable change of variables. This method has already been successfully applied to several nonlinear models, including the Ostrovsky equation, the
The subsequent sections of this paper present some definitions and properties of conformable derivatives, then the framework of GERFM for addressing the governing equation, followed by its application to the Rosenau problem. Finally, results and graphical illustrations are provided before drawing conclusions.
Preliminaries of conformable derivatives
One particular fractional derivative, the conformable derivative, maintains some of the properties of traditional derivatives but extends the notion of integer-order derivatives to the fractional case. Through an analysis of the idea of conformable derivatives and their main properties, this paper tries to present a new insight into this subject.
In this section, we discuss some basic conformable fractional-order derivatives. It allows us to have a better understanding of the result of physical behavior.
A function

Suppose that
For any constant
These are just some of the properties of fractional derivatives with order
The technique




Application of the method
We generate exact solutions for the Rosenau problem using our necessary approach. Now, by integrating equation (4) into equation (1), we obtain the ODE as

Using the homogenous balanced principle on equation (7), we obtain


Solution sets
Family 1 of the solutions of equation (1)
If we take

Equation (8) is substituted into equation (7) using equation (10) to produce the set of equations. The following constant values can be found by solving this set of equations in Mathematica:

These parameter values were obtained using the outlined technique in section 3 of the GERFM with the substitutions of the ansatz functions into the reduced ODE, expanding, and collecting terms. This produced an algebraic system, which was then solved using Mathematica to determine the constants.
Suppose that

Family 2 of the solutions of equation (1)
If we use

The set of equations could be obtained by using equation (12) and substituting equation (8) in equation (7). This set of equations may be solved in Mathematica to find the following constant values:

Hence, our solution becomes

Family 3 of the solutions of equation (1)
Taking

The set of equations may be obtained by using equation (14) and substituting equation (8) into equation (7). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 4 of the solutions of equation (1)
Using

The set of equations may be obtained by substituting equation (8) into equation (7) using equation (16). This set of equations may be solved in Mathematica to find the following constant values:
We suppose that

Family 5 of the solutions of equation (1)
If we employ

The set of equations may be obtained by utilizing equation (18) and replacing equation (8) into equation (7). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 6 of the solutions of equation (1)
If we apply

The set of equations may be obtained by substituting equation (8) into equation (7) utilizing equation (20). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 7 of the solutions of equation (1)
Applying

The set of equations may be obtained by using equation (22) and substituting equation (8) into equation (7). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 8 of the solutions of equation (1)
If we adopt

The set of equations may be obtained by substituting equation (8) into equation (7) using equation (24). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 9 of the solutions of equation (1)
If we operate

The set of equations may be obtained by using equation (26) and substituting equation (8) into equation (7). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 10 of the solutions of equation (1)
If we select

The set of equations may be obtained by substituting equation (8) into equation (7) using equation (28). This set of equations may be solved in Mathematica to find the following constant values:

We suppose that

Family 11 of the solutions of equation (1)
If we consider

We suppose that

Graphical behavior
The graphs allow us to understand the behavior of moving waves. We have given the parameters appropriate values so that the graphical representation of several solutions may be shown. Figure 1 shows the graphical behavior of the solution

The above shows 3D, 2D and contour figures show the graphically behavior of equation (19) which parameters using values:
The above shows 3D, 2D and contour figures show the graphically behavior of equation (23) which parameters using values:

The above shows 3D, 2D and contour figures show the graphically behavior of equation (25) which parameters using values:
The above 3D, 2D and contour figures show the graphically behavior of equation (27) which parameters using values:

The above shows 3D, 2D and contour figures show the graphically behavior of equation (29) which parameters using values:

The above shows 3D, 2D and contour figures show the graphically behavior of equation (31) which parameters using values:
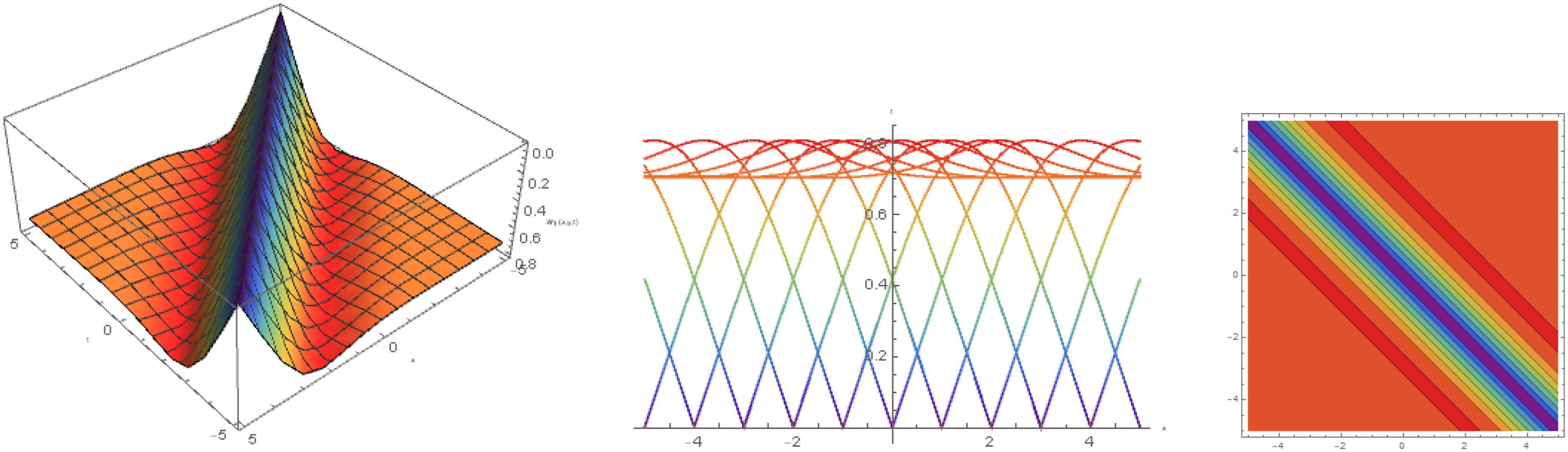
The diagram’s main characteristic is a strong localized peak that appears across the surface in a diagonal orientation. In this context, a soliton entity demonstrates the key characteristics. Solitons represent self-sustaining single waves that retain their wave form and velocity when they propagate. The Rosenau equation creates solutions that behave like solitons. The visual illustration on the graph represents an answer to the Rosenau equation. A dimensional representation of the
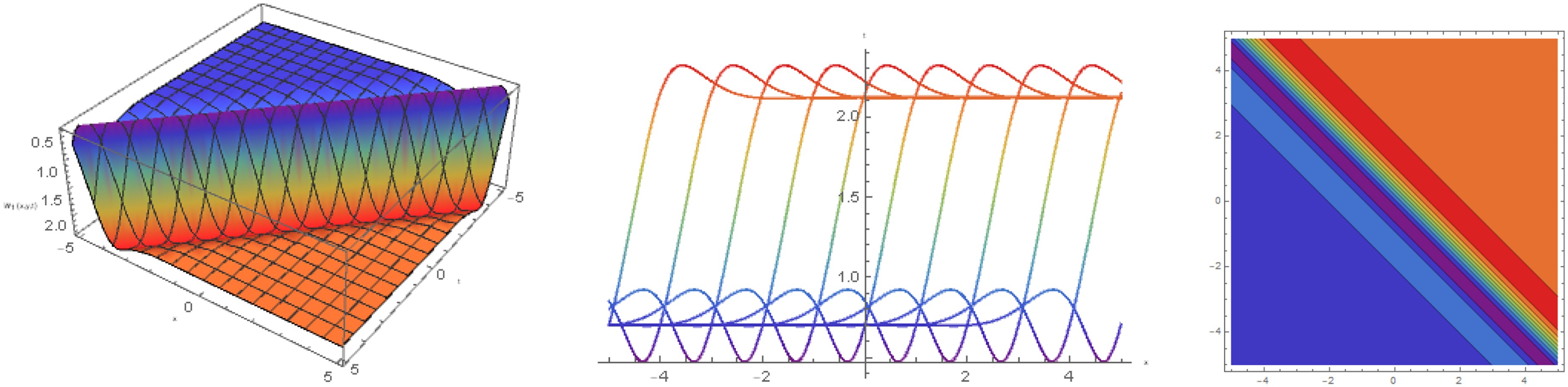
The depicted image indicates that a distinct solution type exists for the Rosenau equation, which could manifest as either periodic waves or cnoidal waves. The graphical presentation reveals two independent surfaces that distinguish themselves from each other. The diagram displays a blue-colored flat surface that remains horizontal on top. The lower part of the visual reveals a textured waveform, which displays color gradients. The bottom part of the image reveals periodic wave patterns across a single horizontal axis, which most likely corresponds to the “
A cnoidal wave solution can be identified through the periodic waves with constant amplitude found on the lower surface. Periodic nonlinear waves, which usually solve the Rosenau equation alongside several NLPDEs, constitute the definition of cnoidal waves.
The different surface patterns show potentially overlapping relations between solutions of the Rosenau equation. The flat part represents a uniform solution, but the corrugated area presents itself through cnoidal or periodic solution patterns.
The different parameters used for solution creation in this case differ from those used previously. The selection of different parameter values in NLPDEs will produce completely different solution patterns.
Results and discussion
The use of GERFM incorporating conformable fractional derivatives in the Rosenau equation has yielded a luxuriant family of exact analytical solutions. The solutions are characterized by dark solitons, bright solitons, kink waves, and anti-kink waves that exist in forms of different functions, such as trigonometric, hyperbolic, and exponential functions. Through the systematic alteration of parameters within the GERFM framework, we are able to obtain a range of nonlinear waveform profiles that underscore the potential of the approach and the adaptability of the Rosenau model in describing intricate physical phenomena.
The most significant result is the free parameter sensitivity of the results obtained, especially
The graphical solution provides additional evidence for the analytical results. The identification of the resulting solutions is clear-cut: Figure 1 is an anti-kink wave, Figure 2 is a kink wave, Figure 3 is a dark soliton, Figure 4 is a bright soliton, Figure 5 is an anti-kink wave, and Figure 6 is a kink wave. All the figures capture the localized and autopropagating nature of these nonlinear waves, corroborating their solitonic property in the fractional Rosenau model. The soliton solutions retain structure and form, whereas kink and anti-kink waves reaffirm the model’s ability to capture step-like or transitional waveforms typical of the majority of physical environments.
In general, the findings highlight GERFM’s capability for exact and diverse solutions of the Rosenau equation. The finding of various soliton and kink-type solutions highlights the theoretical significance of this method for nonlinear wave analysis. Outside of theory, the results hold potential for plasma physics, fluid dynamics, and materials science applications, where solitons and kinks are involved in wave propagation, energy transfer, and stability of nonlinear systems. By combining fractional calculus with GERFM, the study offers methodological innovation along with new insights into the complex dynamics of nonlinear wave equations.
Conclusion
Solitons for a (3 + 1)-dimensional nonlinear Rosenau equation were obtained in this work using the GERF approach. A close study of a Rosenau equation is important for understanding wave events in many physical systems where nonlinear dynamics and dispersion play a big role. This includes materials science, fluid dynamics, as well as plasma physics. For dense discrete systems, the dynamic behavior has been suggested to be explained by this equation. Three-dimensional graphics have aided in visualizing these solutions, which involve not only trigonometric functions but also hyperbolic and exponential functions, thereby enhancing the understanding of wave dynamics. The exploration of free parameters, along with the results presented, shows their direct influence on wave stability, structure, and interactions, which included but were not limited to the production of M-shaped waves, breaths, kinks, and dark, bright, and isolated wave solutions. Results demonstrate that advanced mathematical methods, such as the GERF method, can solve highly nonlinear wave equations very effectively. These insights not only provide future world theoretical knowledge but also have industrial applications in areas such as plasma physics, ocean engineering, and hydrodynamics. The paper highlights the essentiality of mathematical methods employed to assess problematic physical systems. It also provides a launchpad into an extensive study of nonlinear wave phenomena and their various applications.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.