
Abstract
Effective proportional–integral–derivative controller tuning is critical for attaining high-performance operation in direct current motor systems, especially when traditional approaches fail under nonlinear or uncertain dynamics. This study conducted a statistically robust comparative analysis of seven evolutionary algorithms for proportional–integral–derivative gain tuning: genetic algorithm, particle swarm optimisation, shuffled frog leaping algorithm, firefly algorithm, artificial bee colony, simulated annealing and invasive weed optimisation algorithm. Simulations were performed in MATLAB/Simulink using two different tuning scenarios: Case 1 (conservative bounds) and Case 2 (aggressive bounds), with the integral time absolute error serving as the primary performance metric. Analysis of variance, Tukey's honestly significant difference and Cohen's d were employed to ensure statistical validity. The results revealed distinct trade-offs among the algorithms. Particle swarm optimisation achieved the best overall performance, with a minimal integral time absolute error mean of 190.54 in Case 2, low volatility and a moderate execution time of 1200.19 s. The invasive weed optimisation algorithm was the fastest algorithm, with execution times of 285.76 and 371.43 s in Cases 1 and 2, respectively, but it exhibited higher integral time absolute error variability. Simulated annealing and the firefly algorithm yielded the lowest integral time absolute error means (158.74 and 160.22, respectively) in Case 1, but they required the highest computational time (up to 20,567.84 s for simulated annealing). In contrast, the artificial bee colony performed the worst, with a Case 2 integral time absolute error mean of 422.38 and significant gain inconsistency. Statistical analysis with analysis of variance, Tukey's honestly significant difference and Cohen's d revealed the significance of the differences. This work provides evidence-based guidance for selecting evolutionary algorithms in proportional–integral–derivative tuning based on system priorities. A hybrid invasive weed optimisation algorithm–particle swarm optimisation framework is proposed as a promising future direction, combining the rapid global search of invasive weed optimisation algorithm with the reliable convergence of particle swarm optimisation for real-time, high-precision control.
Plain Language Summary
DC motors power many everyday systems, from robots to electric vehicles. To control them effectively, engineers use PID controllers, but tuning these controllers can be difficult. This study compared seven computer algorithms inspired by natural processes to find the best way to tune PID settings. Results showed that Particle Swarm Optimisation (PSO) gave the most reliable overall performance, while Invasive Weed Optimisation (IWOA) was fastest but less consistent. The study provides practical guidance on choosing the right method based on priorities.
Keywords
Introduction
Direct current (DC) motors are essential components used in a wide range of industrial, robotic and automation applications.1–3 Their widespread use is largely due to several desirable properties, including high dependability, ease of control, compact design and the ability to provide precise and stable speed and torque regulation.4,5 These motors thrive in applications such as conveyor belts, electric cars, precision robotic manipulators and aerospace control systems, where accurate and responsive actuation is critical.4,6,7
The dynamic behaviour of DC motors is primarily determined by a set of intrinsic electrical and mechanical parameters.2,3,8 Among these are the armature resistance and inductance, which affect the electrical time constant and energy dissipation; the torque constant, which relates current input to mechanical torque output; and the moment of inertia, which governs the acceleration response of the motor.3,5,8,9 These parameters collectively establish the transient and steady-state characteristics of the motor, determining the capacity of the system to track reference inputs, reject disturbances and maintain stability under shifting loads and environmental conditions.2,3,5,8,9
To harness and optimise these performance characteristics, control techniques must be carefully designed and implemented.10,11 The proportional–integral–derivative (PID) controller is the most extensively used control algorithm due to its intuitive structure, ease of implementation and stable performance under a wide range of operating conditions. The PID controller modulates the control signal using three terms: the proportional gain
However, the overall effectiveness of the PID controller is strongly dependent on precisely tuning its gains (
In light of these challenges, there is an increasing interest in using nature-inspired metaheuristic optimisation methods for PID tuning.2,11,21–26 These algorithms excel at exploring immense, nonlinear and multidimensional search spaces without requiring explicit system models, resulting in robust and versatile optimisation capabilities. Evolutionary algorithms (EAs) have gained attention for their ability to iteratively improve candidate solutions based on biologically or physically inspired mechanisms such as natural selection, swarm intelligence or annealing processes. Representative algorithms include particle swarm optimisation (PSO), which replicates the social behaviour of birds flocking, and genetic algorithm (GA), which is based on the concepts of evolution and genetics. The firefly algorithm (FA) is inspired by bioluminescent signalling; the artificial bee colony (ABC) is modelled after honeybee foraging behaviour; the shuffled frog leaping algorithm (SFLA) combines memetic evolution and local search. Simulated annealing (SA) mimics the metallurgical annealing process; and the invasive weed optimisation algorithm (IWOA) simulates the colonising adaptive propagation of weeds. These methods optimise PID parameters by minimising objective functions such as integral time absolute error (ITAE), integral square error (ISE) or integral absolute error (IAE), therefore enhancing transient and steady-state performance.2,10,21–24,27
Beyond traditional PID controllers, improvements in control theory have resulted in advanced architectures such as fractional-order PID (FOPID) and two-degree-of-freedom PID (2DOFPID) controllers. The FOPID controller incorporates fractional calculus and introduces two fractional orders (λ for integral and μ for derivative terms) to fine-tune memory and dynamic response qualities.7,15 This fractional tuning increases the robustness and adaptability of the controller, especially in systems with complicated or non-integer order dynamics. In contrast, the 2DOFPID controller decouples the control actions related to setpoint tracking and disturbance rejection by introducing distinct feedback loops, allowing more nuanced performance trade-offs and superior handling of external disturbances and noise.7,15,28–30
The primary objective of this research is to design, implement and rigorously evaluate a comprehensive control framework for DC motor speed regulation employing PID controllers optimised by a diverse set of seven EAs (GA, PSO, SFLA, FA, ABC, SA and IWOA). A significant aspect of this study is the establishment of two distinct tuning scenarios: a conservative tuning profile that prioritises smooth, oscillation-free responses with minimal overshoot and a more aggressive profile that emphasises rapid transient responses and minimal settling time, potentially at the cost of increased overshoot or control effort.
This work contributes to the field in several critical ways. First, it provides an extensive comparative analysis of multiple evolutionary optimisation algorithms applied to PID tuning, assessed through multiple time-domain performance metrics including ITAE, percentage overshoot, rise time and settling time. Second, it employs a rigorous statistical framework incorporating one-way analysis of variance (ANOVA) to determine the significance of performance differences among algorithms, Tukey's honestly significant difference (HSD) test for robust pairwise comparisons and Cohen's d to quantify the practical effect sizes, thus ensuring both statistical and practical relevance of findings. Third, the study identifies algorithm-specific strengths and trade-offs, such as the superior convergence speed and exploration capabilities of the IWOA contrasted with the consistent accuracy and exploitation efficiency of PSO. These insights not only provide valuable guidelines for selecting appropriate tuning algorithms based on application-specific requirements but also motivate future research into hybrid and ensemble optimisation strategies that synergise complementary algorithmic features to further enhance PID controller performance and efficiency.
Literature review
DC motor modelling and control
A robust control design for DC motors begins with developing an accurate mathematical model that incorporates both electrical and mechanical dynamics.1–4 The typical approach employs a set of linear, continuous-time differential equations to model the armature circuit and mechanical load. The electrical subsystem is defined by parameters such as armature resistance
This classical linear model is an essential tool for time- and frequency-domain research.1,10 It facilitates the design and stability evaluation of controllers using transfer function or state-space representations, and it is frequently used in both academic and industry contexts due to its simplicity and analytical tractability. However, this model assumes idealised behaviour and omits several nonlinear and time-varying phenomena that are present in real-world applications.9,10,31
DC motors are frequently subjected to nonlinear phenomena such as magnetic saturation, Coulomb and brush friction, varying mechanical loads and temperature-induced parameter drift. 9 These components introduce high-order dynamics and time-varying behaviour, which are not adequately represented by simplistic linear formulations. As a result, while the linear model remains a useful benchmark, it may fall short in applications that require high precision, resilience or flexibility to changing operational conditions.
To overcome these restrictions, improved modelling techniques have been developed. State-space models offer a more adaptable framework for modelling motor dynamics, particularly in multi-input, multi-output (MIMO) systems.32,33 They are ideal for modern control techniques like linear quadratic regulation (LQR) and model predictive control (MPC).32–34
Nonlinear models are used in high-fidelity applications to describe complex behaviours including magnetic saturation, gear backlash and changing friction. These models improve accuracy but increase computational complexity.35–38
In thermally sensitive situations, electrothermal models supplement classic formulations by adding heat generation and dissipation dynamics.39,40 These models help account for temperature-dependent fluctuations in electrical resistance and mechanical performance, which are crucial in long-term or high-power applications.
With the proliferation of digital control systems, discrete-time models have become indispensable. 39 These models discretise continuous dynamics with methods including zero-order hold or Tustin's approximation, allowing for real-time control while accounting for sampling delays and quantisation effects.39–41
When physical parameters are difficult to measure or the system exhibits unknown or very complicated behaviour, empirical and data-driven models (such as autoregressive models with exogenous variables (ARX), neural networks and fuzzy systems) are used.42–44 These models learn system dynamics from data and are particularly valuable in adaptive and intelligent control frameworks. However, they may lack transparency and generalisability.43–45
Finally, hybrid models combining physical and data-driven representations are gaining traction.46–48 These approaches use the interpretability of analytical models and the flexibility of machine learning techniques to support advanced applications such as digital twins and adaptive control systems.47–49
In summary, the choice of a DC motor model is determined by the precise control objectives, desired modelling fidelity and computing restrictions. A well-chosen model is the foundation of effective control system design and is critical for attaining stable, high-performance motor operation in a variety of engineering applications.
PID controller
In industrial settings, the PID controller remains the cornerstone of motor control solutions due to its balance of simplicity, computational efficiency and effectiveness across a broad range of operating conditions.10–14 The PID controller processes the tracking error between the reference input and system output using three distinct actions: proportional
Historically, gain selection has been guided by classical tuning techniques such as Ziegler–Nichols, Cohen–Coon and SIMC, which generate controller parameters using empirical rules or simplified plant models.2,6,7 While these methods provide quick and sometimes effective tuning for linear and well-behaved systems, they struggle in situations including nonlinearities, time delays, multi-objective criteria or abrupt load fluctuations. The ineffectiveness of these methods in capturing complex system dynamics frequently results in control degradation, including oscillatory responses, extended settling times or vulnerability to external perturbations.2,7
To address these challenges, researchers developed advanced PID controller variants that extend the traditional framework. FOPID controllers extend the integral and derivative terms to non-integer orders λ and μ.7,15,28 This improvement incorporates memory effects and non-local behaviour into the control law, increasing robustness and flexibility, especially in systems with non-minimum phase characteristics or fractional dynamics. Another recent improvement is the 2DOFPID controller, which separates the reference tracking path from the disturbance rejection path.15,29,30 This architecture permits independent tuning of the servo and regulatory responses, permitting a more exact balance of fast transient behaviour and disturbance suppression.7,15,28–30
EAs for controller tuning
To overcome the constraints of traditional tuning approaches and improve the adaptability of PID-based control, a significant body of research has concentrated on EAs for controller optimisation.2,24,26 EAs are stochastic population-based optimisation approaches that draw inspiration from natural and social phenomena such as evolution, swarming and thermodynamic behaviour.2,10,21–27 They are particularly effective at navigating complex, multi-modal and non-convex search spaces common in controlling optimisation problems.2,11,23,24
PID controllers have been extensively tuned using algorithms such as the GA, which simulates the process of natural selection through operations such as crossover and mutation; PSO, which is inspired by the social behaviour of birds and fish; and the ABC algorithm, which mimics the foraging behaviour of honeybees. Other well-known EAs include the FA, SFLA, SA and IWOA. Each of these algorithms provides distinct ways for balancing exploration (global search) with exploitation (local refinement), which is critical for determining optimal gain values under varied operating constraints.2,10,11,21–27
The optimisation procedure usually entails minimising a well-defined objective or cost function using performance indices such as the ITAE, ISE, IAE, or mean squared error (MSE).10,24,27 These metrics quantify control quality in terms of both transient and steady-state performances. The efficacy of each EA is determined by control-oriented hyperparameters such as population size, number of iterations, convergence criteria and algorithm-specific factors such as inertia weight (in PSO) or mutation rate (in GA).50,51 Proper tuning of these hyperparameters is crucial in achieving a stable and efficient optimisation outcome.
Comparative studies and evaluation approaches
Numerous studies have empirically proved that EAs outperform standard PID tuning strategies, particularly in complex and nonlinear systems. For example, PSO-based PID controllers have been shown to minimise settling time by up to 20% and improve ISE by about 14.68% when compared to traditionally tuned counterparts. 2 More recent approaches, such as the modified jellyfish search (mJS) algorithm, improve the exploration–exploitation balance and offer faster stabilisation and lower ITAE values. 10 Similarly, FOPID and 2DOFPID controllers optimised using EAs have shown significant gains in disturbance rejection, overshoot minimisation and resilience under varying load conditions.6,7,15
Recent research trends have also focused on hybrid and ensemble optimisation frameworks, which combine different metaheuristic algorithms to use their complementary strengths. For example, a hybrid FA–PSO algorithm may use PSO for global exploration and FA for local exploitation, resulting in faster convergence rates and higher accuracy.6,7 Despite these advances, a considerable fraction of published comparison studies suffer from inconsistencies in experimental protocols, a lack of control over testing conditions and insufficient statistical validation. As a result, it becomes challenging to generalise data or draw solid conclusions about algorithm supremacy.
To achieve scientific rigour and reproducibility, comparative studies must use standardised simulation environments, well-defined performance criteria and extensive statistical analysis. This allows for meaningful benchmarking of algorithms and greater insights into their behaviour under different control objectives and disturbance scenarios.
Research gaps and study rationale
Despite the promising outcomes of EAs in PID tuning, several critical gaps remain in the existing body of research. First, many studies evaluate algorithm performance under narrowly defined operational conditions, failing to consider how tuning behaviour varies between conservative (smooth, low-overshoot) and aggressive (fast, high-gain) response profiles. Second, comparative results are often reported without statistically testing the significance or practical relevance of observed differences, limiting their utility for real-world controller selection.
This study aims to bridge these gaps by systematically evaluating a diverse suite of EAs within a unified DC motor control framework. The investigation is conducted across dual-case scenarios; one prioritising robustness and smoothness and the other emphasising speed and responsiveness. Objective performance is quantified using time-domain metrics such as ITAE, overshoot, rise time and settling time. In addition, a rigorous statistical evaluation framework is employed, including one-way ANOVA to test for overall significance, Tukey's HSD to test for detailed pairwise comparisons and Cohen's d to quantify effect sizes and practical relevance.
This study not only provides actionable insights into the trade-offs associated with each optimisation strategy but also lays a solid foundation for future research into adaptive, hybrid and intelligent control systems capable of meeting the demands of next-generation electromechanical applications by combining technical depth, methodological rigour and comparative breadth.
Materials and methods
This section describes the mathematical model of the DC motor, the mathematical formulation of the PID controller, the EAs used to optimise the PID controller gains and the performance evaluation metrics used in this research.
DC motor model
This subsection describes the mathematical model for the DC motor used in the present study. The continuous-time equations governing the motor's speed control dynamics are presented, incorporating key parameters such as armature resistance, inductance and torque constant. These elements are essential for accurately replicating the system's behaviour. The continuous-time DC motor model is expressed as follows2,24:

where
The model in Equation (1) was chosen due to its widespread adoption as a foundational and well-established representation of DC motor dynamics in control system design. It effectively captures the essential electrical and mechanical behaviours relevant to speed regulation without introducing unnecessary complexity. Although more advanced models exist, accounting for nonlinearities, frictional effects or thermal dynamics, this standard linear model offers sufficient fidelity for optimising PID controller parameters, as required in this study. Its simplicity enables analytical tractability and efficient implementation, aligning with common practices in initial control design and benchmarking.
Table 1 presents the key physical parameters used in the mathematical model of the DC motor, including electrical and mechanical constants such as armature resistance, inductance, moment of inertia and torque constant, which are essential for accurately simulating speed control dynamics.
Physical parameters of the DC motor model.

PID controller
This subsection presents the mathematical formulation for the PID controller used in this study. The continuous-time model is explained, with a focus on how the parameters of the controller (proportional gain
The continuous-time PID controller model is expressed in Equation (2), as given by10,24,52:
This standard continuous-time PID controller structure (Equation 2) was chosen due to its universal applicability and pervasive use in industrial control systems. Its simplicity, robustness and proven effectiveness in regulating a wide range of dynamic systems make it the most common and practical choice for initial controller design. The clear physical interpretations of its proportional, integral and derivative gains facilitate intuitive understanding and effective tuning. While various other PID forms (such as parallel and series) and advanced control strategies exist, this fundamental representation provides an optimal balance between performance and computational complexity for the objective of the present study, which is parameter optimisation.
Optimisation algorithms
This subsection describes the EAs used to optimise the PID controller gains. The parameter setups and key characteristics of these algorithms are described to demonstrate their application in minimising the ITAE objective function.
The EAs used in this study include GA, PSO, SFLA, FA, ABC, SA and IWOA. Table 2 outlines the parameter configuration ranges and population settings used for each optimisation algorithm during PID tuning, as reported in the literature.2,10,21–24,27,50,51
Hyperparameter ranges of EAs from the literature.

Building upon these established ranges from the literature, the specific fixed parameter values for each algorithm, as presented in Table 3, were determined through a preliminary experimental tuning process. This involved a series of trial-and-error runs and heuristic adjustments within the ranges indicated in Table 2, aiming to identify configurations that demonstrated a robust balance between exploration and exploitation and consistently yielded competitive performance for the PID tuning problem. While a comprehensive parameter sensitivity analysis was beyond the scope of the current study, these selected fixed values ensure a reproducible experimental setup for a fair comparative analysis among the algorithms.
Parameter settings for EAs used in this study.
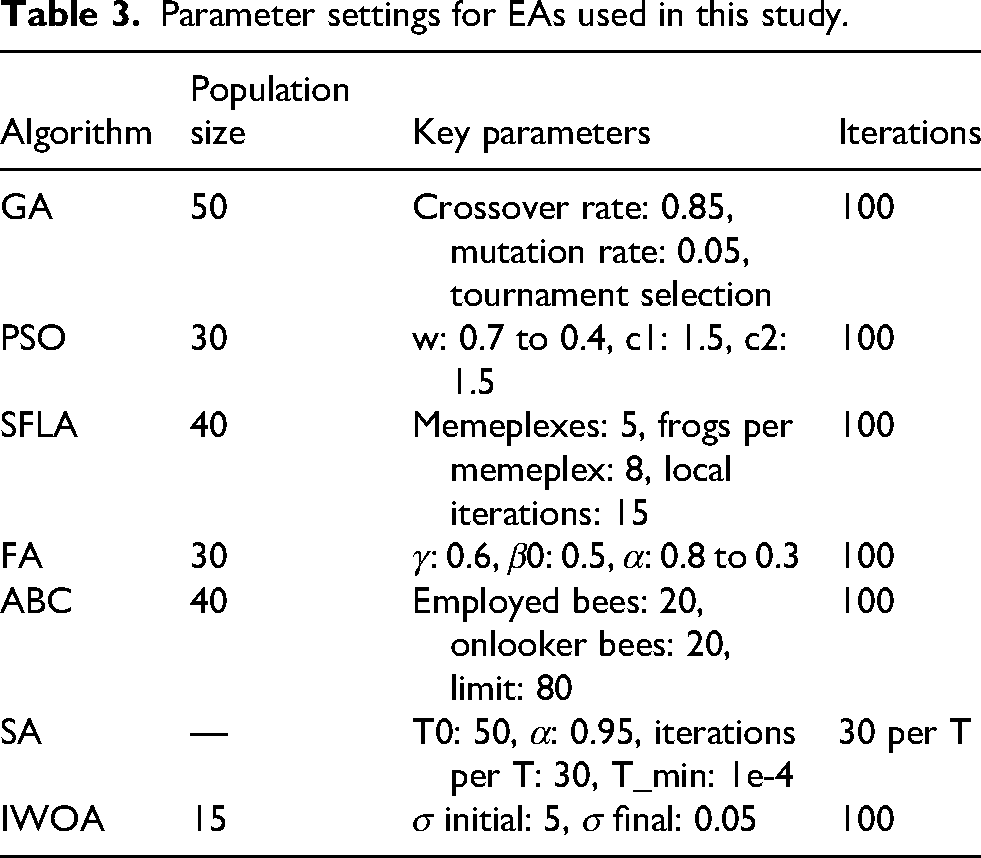
For this study, various EA parameter settings were chosen based on their efficacy for PID tuning, as indicated in Table 3. These configurations seek to balance the trade-off between exploration and exploitation in order to identify optimal solutions.
The ITAE objective function, used to measure the transient and steady-state response error for DC motor speed control, is given in Equation (3)10,24,27:
where t indicates time and
The ITAE is chosen as the objective function for this study due to its widely recognised effectiveness in optimising both transient and steady-state response characteristics in control systems. Compared to other common error criteria such as ISE or IAE, ITAE provides a stronger penalisation for errors that persist over time, thereby promoting faster settling and improved steady-state accuracy. Furthermore, its time-weighting factor makes it less sensitive to initial large errors and more sensitive to errors occurring later in the response, which often results in smoother control actions and reduced oscillations, a desirable outcome for motor speed control applications.
Simulation and evaluation
This subsection outlines the implementation of the DC motor model, PID controller and optimisation techniques in MATLAB/Simulink. It also details the performance evaluation metrics, including statistical measures (variance and standard deviation) and system reaction criteria (rise time, settling time and percentage overshoot), used for data analysis. Additionally, as shown in the Simulink model in Figure 1, the speed control of the DC motor is implemented using a PID controller, which regulates the actual speed by minimising the error between the desired and actual speeds while considering the effects of the H-bridge, gear system and current and pulse width modulation (PWM) bounds.
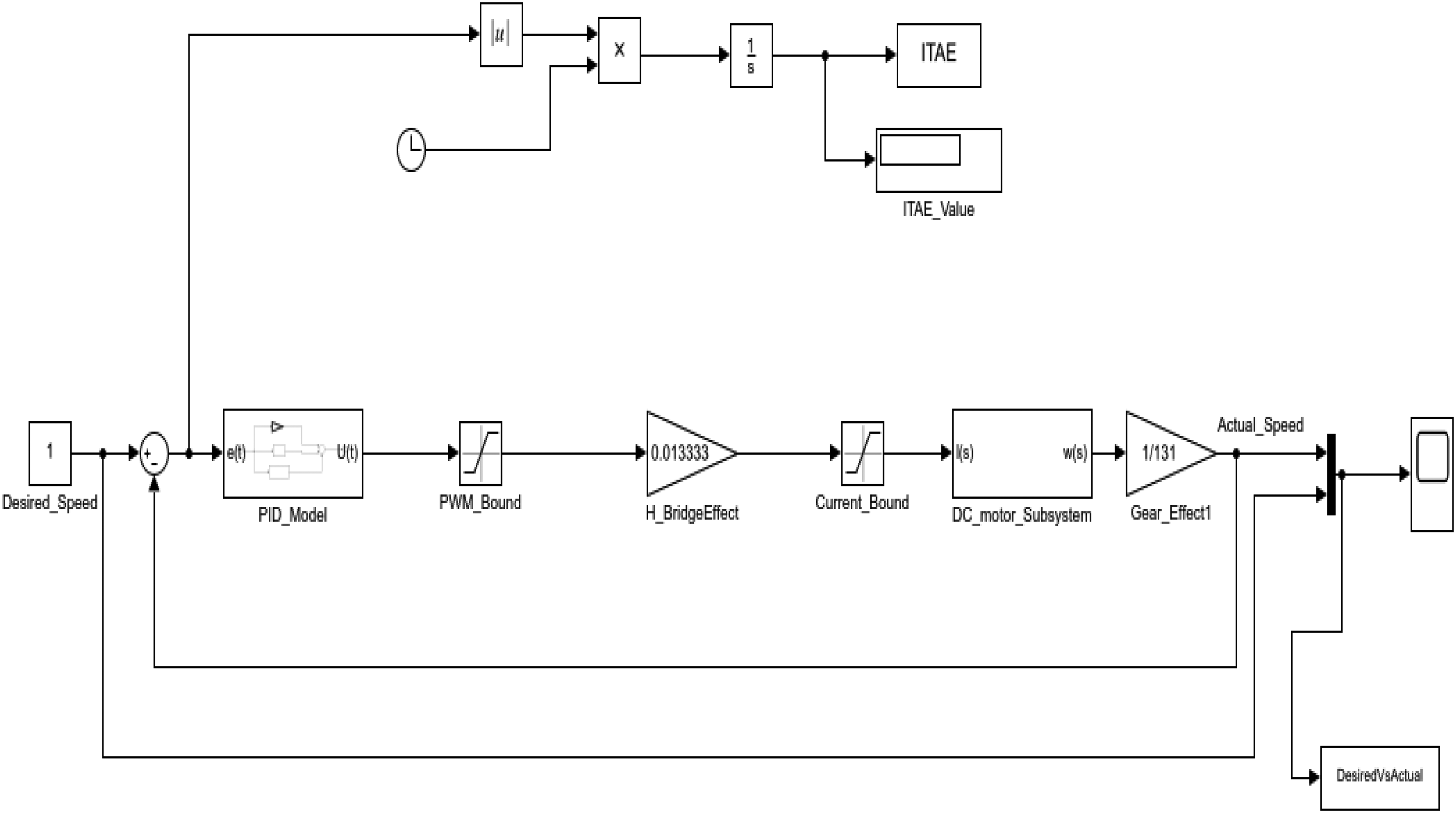
Simulink model of a DC motor speed control system utilising a PID controller. The model includes subsystems representing the motor dynamics, gear effect, H-bridge effect and constraints on current and PWM signals. The ITAE block evaluates the performance of the system.
The PID controller minimises the error between desired and actual speeds by modifying the control signal through the H-bridge and DC motor subsystem. System stability is inherently supported by factors such as gear effects and defined boundary limits within the DC motor subsystem. The ITAE objective function is employed to evaluate performance by integrating time-weighted errors, specifically aimed at optimising both transient and steady-state responses.
Performance evaluation
The metrics used for assessing the performance of each EA in this study include statistical analyses (ANOVA, Tukey’s HSD, Cohen's d effect size and descriptive statistics such as mean, standard deviation, confidence interval and interquartile range) and system response measures (rise time, settling time and percentage overshoot).
Statistical analysis
One-way ANOVA
ANOVA was used to test whether there are statistically significant differences between the performance of the algorithms. It was formulated using Equation (4).53–55
If the p-value is less than .05, the null hypothesis is rejected, indicating a significant difference between groups, where
The result informs about the differences among group means. A significant ANOVA result suggests that at least the mean of one group deviates notably from the others, indicating non-homogeneity among groups, while a non-significant result indicates that the group means are relatively similar.
Tukey’s HSD test
Tukey's HSD is a post hoc test which was used when ANOVA was significant. It was used to find which specific algorithms are different. It is represented by Equation (5).53–55

where
The result informs about the specific group differences. If few pairwise comparisons reach significance, it suggests that most groups are similar; alternatively, numerous significant differences highlight clear distinctions among groups, pinpointing where the variability or divergence exists.
Cohen’s d effect size
Cohen’s d was used to measure the effect size that quantifies the standardised difference between two means of two algorithms (Equation 6).
If 
where
The result informs about the magnitude of the difference between the two groups. A small Cohen's d value suggests that the group means are very similar relative to the variability, whereas a large Cohen's d indicates a substantial difference, signifying that the groups are well-differentiated in practical terms.
Mean
The mean was used to determine the central value of the dataset. It is expressed using Equation (7)56–58:
where
The result informs about the typical or average value of the dataset. A mean that is representative of the data suggests that the observations are closely clustered around this central value, whereas an average skewed by extreme values may indicate asymmetry or the presence of outliers in the data.
Standard deviation
The standard deviation was used to measure how spread out the values in a dataset are. It is expressed using Equation (8)56–58:

The result informs about the variability of the dataset. A smaller standard deviation indicates that the data points are tightly clustered around the mean, while a larger standard deviation suggests greater spread, which may point to higher variability or potential anomalies.
Confidence interval
The confidence interval was used to estimate the range within which the true population mean is likely to lie, based on a given confidence level. It is expressed using Equation (9)56–58:
where
The result informs about the precision of the estimated population mean. A narrow confidence interval indicates that the sample mean is a precise estimate of the true mean, likely due to a small standard deviation and/or a large sample size. Conversely, a wide confidence interval suggests increased uncertainty about the true population mean, often due to high variability or a smaller sample size.
Box-and-whisker plot
A box-and-whisker plot was used to graphically represent the distribution of values in a dataset by summarising its central tendency and variability. It is expressed using Equation (10).56–58
The five-number summary comprises the minimum (min), the first quartile (Q₁), the median (Q₂), the third quartile (Q₃) and the maximum (max). A commonly used measure of spread in a box plot is the interquartile range (IQR), which is defined as
The lower and upper whiskers are typically defined as

The result informs about the central tendency and variability of the dataset. A compact box indicates that the central 50% of the observations are closely clustered, while longer whiskers or numerous outliers (points beyond the whiskers) suggest higher variability or potential anomalies in the data.
System response evaluation
Rise time
The rise time measures the time it takes for the output to increase from 10% to 90% of the setpoint. A shorter rise time indicates a quicker response, although it may lead to an overshoot. Its mathematical relation is shown in Equation (11)
59
:
Settling time
The settling time measures the time required to maintain the output within a defined tolerance (±2% or ±5%) of the setpoint. A shorter settling time indicates better stability. Equation (12)
59
shows its mathematical relation:
Percentage overshoot
The percentage overshoot measures the amount by which the system output exceeds the setpoint. A lower overshoot is preferable for stability and precision. Equation (13)
59
shows its mathematical relation:
Experimental results and analysis
The performance of the EAs (GA, PSO, SFLA, FA, ABC, SA and IWOA) was evaluated using the two cases presented in Table 4. Table 4 outlines the parameter settings for the two optimisation problem cases explored in this study, including the PID gain and motor speed setpoint limits.
Parameter settings for the optimisation problem in two cases.
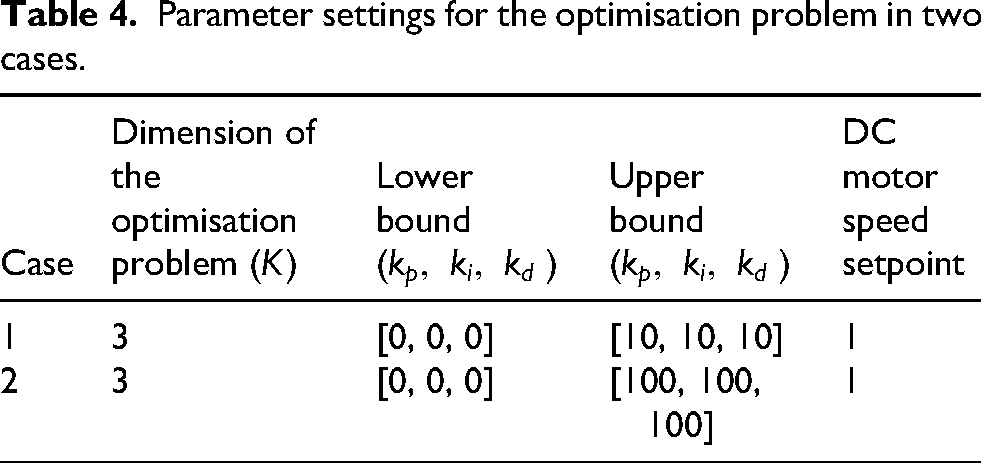
The boundaries in Case 1 are conservative tuning ranges often applied for small-scale DC motor control applications, ensuring stability and responsiveness with moderate actuator effort. In Case 2, the upper bounds were purposefully increased to [100, 100, 100] to model conditions with higher dynamic loads or systems with greater inertia, which may necessitate stronger control actions. This broader search space also prevents metaheuristic algorithms from converging prematurely and represents potential actuator capabilities under more demanding conditions. While such large increases may not always be realised in practice, the bounds remain within reach for high-performance motor drivers with sturdy sensor–actuator couples.
For each case in Table 4, the seven algorithms (GA, PSO, SFLA, FA, ABC, SA and IWOA) were executed over five independent iterations using the parameter settings in Table 3. Performance metrics recorded included execution time (s),
Performance analysis of the algorithms on the test cases
Figures 2 and 3 present the box plots showing the comparative analysis of the performance of seven optimisation algorithms (GA, PSO, SFLA, FA, ABC, SA and IWOA) in tuning PID controller parameters over the five independent iterations. The evaluation is based on numerous performance indicators, including execution time; PID gain values

Box plots of execution time (s),

Box plots of execution time (s),
Case 1
From Figure 2, the following observations can be drawn:
The execution time analysis indicates that ABC and FA are significantly more time-consuming than the other algorithms, with ABC having the longest execution time. In contrast, IWOA, PSO and GA had the shortest and most consistent execution times, indicating higher computational efficiency and scalability for real-time or iterative tuning applications. Regarding the PID gain parameters, most algorithms converge to similar values for In terms of control performance, as quantified by the ITAE metrics, ABC once again performs poorly with the highest ITAE mean, variance and standard deviation. This indicates that the control quality is inadequate and that performance varies greatly between runs. IWOA, SA, PSO and GA, on the other hand, consistently yield low ITAE values with limited variability, demonstrating their efficacy in offering precise and dependable PID tuning results. FA has slightly increased ITAE variability, whereas SFLA offers competitive performance with moderate consistency.
In closing, the results establish that IWOA, SA and PSO are the most reliable and efficient algorithms for PID parameter optimisation, with little computing overhead and superior control performance. ABC, on the other hand, is the least favourable due to its low precision, high variability and exorbitant computational demands.
Case 2
From Figure 3, the following observations can be drawn:
In terms of computing efficiency, ABC and FA maintain the slowest algorithms, with FA having a slightly faster execution time than ABC. The remaining algorithms, particularly IWOA and PSO, operate substantially faster and more consistently, demonstrating their appropriateness for real-time or resource-constrained control applications. The analysis of the PID gain parameters reveals that most algorithms converge to comparable and reasonable values for The ITAE measurements, which assess control performance, provide additional support for this conclusion. ABC has the highest ITAE mean, variance and standard deviation, indicating poor average performance and a lack of consistency over several runs. In comparison, GA, PSO, SA, FA and SFLA obtain the lowest ITAE values with the least dispersion, demonstrating both precision and consistency. IWOA performs admirably, with slightly higher but still acceptable ITAE outcomes and low variability.
In a nutshell, the findings from Case 2 are congruent with those of Case 1. GA, PSO and SFLA emerge as the best-performing algorithms, providing fast runtimes, stable PID gain values and better control performance with high dependability. IWOA and SA are also strong competitors, offering an excellent blend of performance and consistency. However, ABC remains the least successful technique, with poor parameter tuning, significant control error and high computational cost.
Statistical evaluation of the performance of the algorithms on the test maps
Tables 5 and 6 present a detailed statistical comparison of the performance metrics of the EAs in Cases 1 and 2. These tables provide the mean, standard deviation and 95% confidence interval for seven key performance metrics: execution time (s),
Statistical performance metrics comparison of the EAs on Case 1. Green indicates the algorithm that achieved significant practical impact, while red indicates the algorithm that significantly underperformed.

Note that for
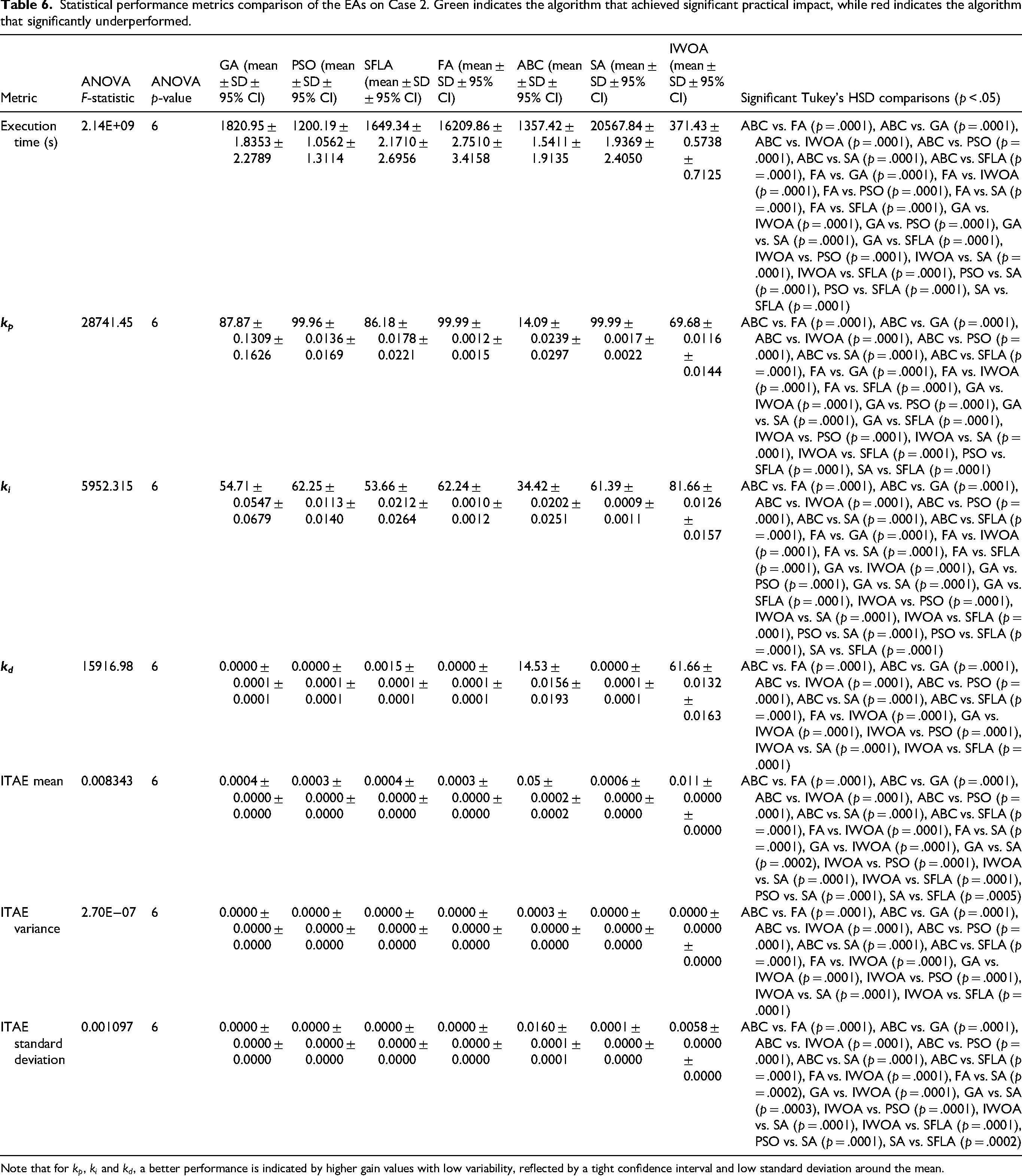
Statistical performance metrics comparison of the EAs on Case 2. Green indicates the algorithm that achieved significant practical impact, while red indicates the algorithm that significantly underperformed.
Note that for
Case 1
From Table 5, the following observations can be drawn:
Execution time (s): The IWOA (mean: 285.76 s) and PSO (mean: 290.96 s) exhibited the shortest average execution times, indicating superior computational efficiency. Conversely, the SA (mean: 9496.20 s) and FA (mean: 4996.06 s) recorded the longest execution times, signifying lower efficiency. The extensive list of significant Tukey’s HSD comparisons underscores that nearly all algorithms differ significantly in their execution speed. PID gain values ( ITAE mean: For control performance, a lower ITAE mean signifies better error minimisation. The IWOA (mean: 0.0320) and FA (mean: 0.0322) achieved the lowest mean ITAE values, demonstrating a superior ability to minimise the time-weighted absolute error. In contrast, the ABC algorithm (mean: 0.3752) showed a substantially higher ITAE mean, indicating a significantly poorer control performance in this regard. Tukey’s HSD comparisons highlight that the ITAE mean performance of ABC is statistically distinct and inferior to most other algorithms. ITAE variance and ITAE standard deviation: These metrics quantify the consistency of control performance, with lower values indicating higher consistency. The SFLA (ITAE variance: 0.0000; ITAE SD: 0.0028) and PSO (ITAE variance: 0.0000; ITAE SD: 0.0029) demonstrated the highest consistency (lowest variance and standard deviation). Conversely, the ABC algorithm consistently exhibited significantly higher ITAE variance (0.0248) and ITAE standard deviation (0.1575), indicating substantial variability and less consistent control performance. Tukey’s HSD results confirm that the consistency of ABC is statistically inferior to that of other algorithms, and several other significant pairwise differences exist, particularly for ITAE standard deviation.
Overall, IWOA and PSO emerge as highly efficient algorithms in terms of execution time and effective in minimising control error (ITAE mean). SFLA and PSO also excel in terms of control consistency (low ITAE variance and standard deviation). In stark contrast, SA and FA demonstrated lower computational efficiency (high execution times), while ABC consistently underperformed across all control performance metrics (ITAE mean, variance and standard deviation), despite yielding unique PID gain settings.
Case 2
From Table 6, the following observations can be drawn:
Execution time (s): The IWOA demonstrated the fastest average execution time (mean: 371.43 s), followed by PSO (mean: 1200.19 s) and ABC (mean: 1357.42 s), indicating their superior computational efficiency. Conversely, SA (mean: 20567.84 s) and FA (mean: 16209.86 s) recorded significantly longer execution times, indicating lower efficiency. The extensive list of significant Tukey’s HSD comparisons confirms pronounced statistical differences in execution time among nearly all algorithm pairs. PID gain values ( ITAE mean: A lower ITAE mean indicates better control performance. PSO (mean: 0.0003) and FA (mean: 0.0003) achieved the lowest mean ITAE values, demonstrating superior error minimisation. Conversely, ABC (mean: 0.05) and IWOA (mean: 0.011) exhibited substantially higher ITAE means, indicating poorer control performance in this aspect. Significant Tukey’s HSD comparisons strongly indicate that ABC and IWOA (to a lesser extent) have statistically distinct and inferior ITAE mean performances compared to the leading algorithms. ITAE variance and ITAE standard deviation: These metrics measure the consistency of control performance, with lower values being desirable. Algorithms like GA, PSO, SFLA and FA demonstrated extremely low values (effectively 0.0000 for both metrics), indicating very high consistency. ABC consistently presented the highest ITAE variance (0.0003) and standard deviation (0.0160), followed by IWOA (ITAE standard deviation: 0.0058), signifying less consistent control outcomes. Tukey’s HSD results confirm that the consistency of ABC is statistically inferior to all other algorithms for these metrics, and IWOA also shows significant differences compared to the most consistent performers.
Overall, IWOA demonstrated superior computational efficiency (lowest execution time). However, its control performance in terms of ITAE mean and consistency (ITAE standard deviation) was not among the best. PSO and FA generally showed excellent performance in minimising error (ITAE mean) and consistency (ITAE variance/standard deviation). The ABC algorithm, while relatively fast, consistently exhibited the poorest control performance and consistency across all ITAE metrics, and it also produced distinctly different PID gain values compared to other algorithms. The diverse and statistically significant differences observed across all metrics highlight the varying strengths and weaknesses of each optimisation algorithm in the context of PID controller tuning.
Practical implications of statistically significant differences using effect size analysis
To further quantify the pairwise differences between EAs with excellent performance in Cases 1 and 2 across the multiple performance metrics, raw Cohen's d values were used to interpret the effect size (see Tables 7 and 8).
Effect sizes for EA (PSO vs. SFLA, IWOA vs. SFLA and PSO vs. IWOA) comparisons on Case 1.

Effect sizes for EAs (PSO vs. FA, IWOA vs. FA and PSO vs. IWOA) comparisons on Case 2.

Case 1
In Case 1, IWOA, PSO and SFLA demonstrated significantly superior performance compared to other EAs, as shown in Table 5. Accordingly, Tukey’s HSD results revealed significant differences between PSO and SFLA, between IWOA and SFLA and between PSO and IWOA. Table 7 presents the effect size measurements of these differences using Cohen's d.
From Table 7, the following observations can be drawn:
Execution time (s): The comparisons reveal extreme effects, consistently highlighting IWOA as the most computationally efficient algorithm. Specifically, PSO demonstrated an extreme speedup over SFLA (d = −220.59), while IWOA was considerably faster than SFLA (d = 245.39, extreme slowdown for SFLA) and also faster than PSO, albeit with a smaller extreme effect (d = 3.62, slight slowdown for PSO relative to IWOA). PID gain values ( ITAE mean: When evaluating the ITAE mean, a very large effect (d = −1.68) indicated that PSO achieved a significantly better (lower) ITAE mean than SFLA. SFLA, in turn, had a much better (lower) ITAE mean relative to IWOA, a difference quantified as an extreme effect (d = 9.08). Similarly, PSO demonstrated a much better (lower) ITAE mean compared to IWOA, another extreme effect (d = 3.78). ITAE variance: Extreme effects were observed across all pairs. SFLA demonstrated a much lower (better) ITAE variance than did PSO (d = 7.88) and also a much lower ITAE variance than did IWOA (d = −92.47). PSO also showed a much lower (better) ITAE variance compared with IWOA (d = −78.49). ITAE standard deviation: The comparisons mirrored those of ITAE variance, with all exhibiting extreme effects. SFLA consistently had a much lower (better) ITAE standard deviation relative to PSO (d = 7.89) and IWOA (d = −79.99). PSO also showed a much lower (better) ITAE standard deviation compared with IWOA (d = −72.09).
In summary, Cohen's d analysis reveals that while IWOA consistently excels in computational speed, it generally underperforms in minimising control error (ITAE mean) and ensuring consistency (ITAE variance/standard deviation) compared to PSO and SFLA. PSO and SFLA demonstrate superior performance in ITAE-related metrics, with SFLA often showing greater consistency. The distinct effect sizes observed across PID gain values also highlight the varying tuning strategies inherent to each algorithm. These findings are crucial for selecting an appropriate algorithm based on the desired balance of efficiency, accuracy and robustness for a given control application.
Case 2
In Case 2, IWOA, PSO and FA demonstrated significantly superior performance compared to other EAs, as shown in Table 6. Accordingly, Tukey’s HSD results revealed significant differences between PSO and FA, between IWOA and FA and between PSO and IWOA. Table 8 presents the effect size measurement of these differences using Cohen's d.
From Table 8, the following observations can be drawn:
Execution time (s): The comparisons consistently indicate extreme effects, highlighting PSO and IWOA as the more efficient algorithms. Specifically, PSO demonstrated an extreme speedup over FA (d = −7203.42), indicating that PSO is significantly faster. IWOA also proved to be considerably faster than FA, as shown by an extreme effect representing an extreme slowdown for FA relative to IWOA (d = 7970.56). Between PSO and IWOA, an extreme effect (d = 975.12) suggested a slight slowdown for PSO, confirming IWOA's overall superior speed. PID gain values ( ITAE mean: All comparisons revealed extreme effects, emphasising the substantial differences in error minimisation. PSO demonstrated a significantly better (lower) ITAE mean than did FA (d = −3.89). Furthermore, both FA (d = −598.4) and PSO (d = −598.49) showed much better (lower) ITAE mean values compared to IWOA, indicating their superior ability to minimise the time-weighted absolute error. ITAE variance: All comparisons again yielded extreme effects, highlighting significant differences in control performance consistency. PSO exhibited much lower (better) ITAE variance than did FA (d = −28.16). Additionally, both FA (d = −311.08) and PSO (d = −311.08) demonstrated much lower (better) ITAE variance compared to IWOA, signifying their superior consistency. ITAE standard deviation: The analysis consistently showed extreme effects across all pairs. PSO had a much lower (better) ITAE standard deviation than FA (d = −23.93). Both FA (d = −674.07) and PSO (d = −674.24) also exhibited much lower (better) ITAE standard deviation compared to IWOA, reinforcing their greater consistency in control outcomes.
In summary, Cohen's d effect size analysis delineates the distinct performance characteristics of PSO, FA and IWOA. While IWOA is exceptionally fast, it tends to be less effective in minimising control error and ensuring consistency compared to PSO and FA. PSO generally demonstrates strong performance in ITAE-related metrics and execution time, often outperforming FA in these aspects. FA, while slower, shows competitive ITAE performance and consistency compared to IWOA. The large effect sizes observed across most metrics underscore that the choice of algorithm should be carefully considered based on the specific priorities of the application, whether it be computational speed, error minimisation or control consistency.
Computational efficiency and execution time analysis
While the effectiveness of an optimisation algorithm is of topmost importance, its computational efficiency, particularly execution time, is a critical factor, especially in practical applications or real-time systems. This aspect allows for a comprehensive understanding of the trade-off between solution quality and computational cost.
Table 9 summarises the mean execution times for each optimisation algorithm across both Cases 1 and 2, illustrating their computational efficiency.
Mean execution time of optimisation algorithms in Cases 1 and 2.
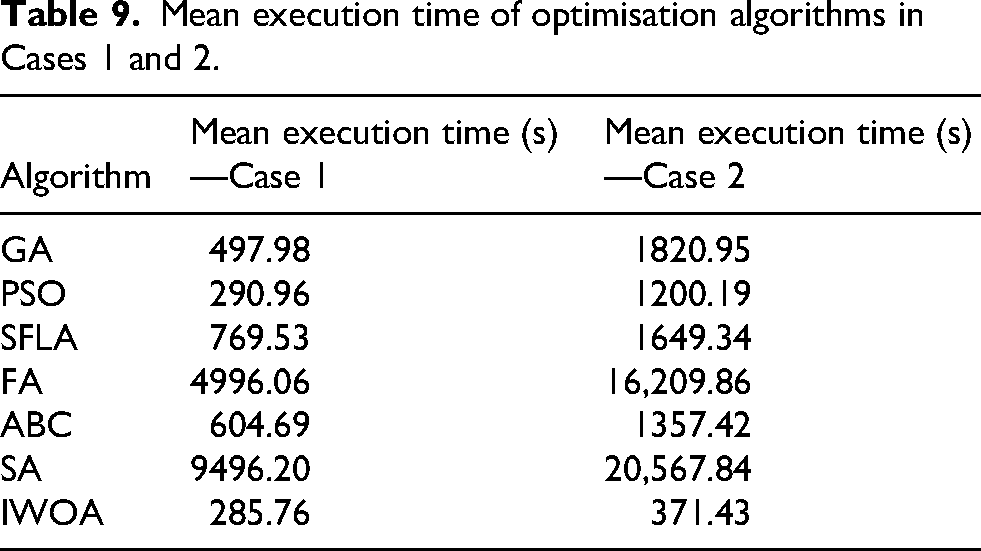
Table 9 presents the mean execution time (in seconds) for each optimisation algorithm (GA, PSO, SFLA, FA, ABC, SA and IWOA) over five iterations in both Case 1 and 2 scenarios, providing a quantitative measure of their computational efficiency.
As observed from Table 9, the execution times for all algorithms were significantly higher in Case 2 compared to Case 1, indicating a more complex or computationally intensive optimisation problem in the second scenario. Among the algorithms, IWOA consistently demonstrated the highest computational efficiency, with mean execution times of 285.76 s in Case 1 and 371.43 s in Case 2. PSO also exhibited strong efficiency, ranking as the second fastest with 290.96 s in Case 1 and 1200.19 s in Case 2. Algorithms such as GA, ABC and SFLA showed intermediate computational costs, ranging from approximately 500 to 770 s in Case 1 and from 1350 to 1820 s in Case 2.
SA and FA were indeed the slowest algorithms, confirming their reputation for higher computational demands in certain optimisation contexts. SA recorded the longest mean execution times at 9496.20 s in Case 1 and a substantial execution time of 20,567.84 s in Case 2. Similarly, FA exhibited considerably high execution times, with 4996.06 s in Case 1 and 16,209.86 s in Case 2.
This analysis quantifies the trade-off between solution quality (as previously discussed in terms of ITAE and step response) and computational cost. While algorithms like SA and FA are known for their strong exploration capabilities and can achieve highly consistent and optimal ITAE values (as shown in earlier analyses), their significantly longer execution times highlight that such precision may come at a considerable computational expense. Conversely, highly efficient algorithms like IWOA and PSO, while potentially showing slight variations in optimal ITAE consistency compared to the absolute best, offer a robust balance of performance and speed, making them more suitable for applications where rapid computation is critical.
Toward a synergistic IWOA–PSO hybrid framework for adaptive PID controller optimisation
Based on the comparative performance analysis conducted in this study, the development of a hybrid optimisation framework that combines the core strengths of the IWOA and PSO emerges as an appealing direction for advanced PID controller design. The objective for such hybridisation is to leverage the unique yet complementary properties of each algorithm to address the trade-offs between exploration efficiency and solution robustness.
IWOA has shown excellent computational efficiency and fast convergence in terms of execution time, making it ideal for global exploration in high-dimensional search spaces. However, the effectiveness of the algorithm in terms of consistency and optimal control quality degrades, as evidenced by higher mean values and variability in the ITAE. This implies a vulnerability to premature convergence or trapping in local optima while functioning independently.
In contrast, PSO has demonstrated strong convergence qualities and improved reliability in providing lower ITAE mean values with lower variance and standard deviation throughout multiple runs. Its swarm-based adaptive search techniques lend themselves well to local exploitation and fine-tuning of control parameters, making it especially suitable for improving solutions identified during initial coarse exploration.
Given these complementing dynamics, a hybrid IWOA–PSO optimisation framework is proposed. In this two-stage approach, IWOA can be employed during the initial iterations to perform an expedited global search, identifying promising regions of the solution space. PSO is then invoked for localised optimisation inside these regions, thereby fine-tuning the PID controller parameters with high precision. This synergistic coordination is anticipated to overcome the limitations of each algorithm when employed independently, resulting in superior results in terms of control accuracy, consistency and computational economy.
To improve adaptability and robustness under varying operating conditions, this hybrid technique can be expanded into an ensemble-based adaptive control scheme. Multiple optimisation techniques, including IWOA, PSO and potentially other metaheuristics, could be dynamically selected or weighted based on performance metrics or system feedback during runtime. Techniques such as algorithm selection, fusion-based decision-making or online learning could be incorporated to adaptively adjust the optimisation strategy, resulting in a self-tuning control mechanism capable of responding to real-time disturbances, nonlinearities and time-varying system dynamics.
Thus, the proposed IWOA–PSO hybrid, potentially embedded within an ensemble metaheuristic framework, offers a promising foundation for the design of adaptive, high-performance PID control systems in complex, uncertain environments.
Optimal PID gain tuning and control system performance
This section presents a detailed examination of the optimised PID controller parameters and their resulting control system performance for both Cases 1 and 2.
Table 10 presents the optimal PID gain values (
Optimal PID gain values and step response performance metrics for Cases 1 and 2.

From Table 10, in Case 1
For Case 2, the algorithms generally yielded significantly higher optimal
Quantitatively, IWOA consistently produced fast rising times across both cases, while most other algorithms (excluding ABC) maintained very low overshoot and rapid settling. ABC consistently exhibited different gain profiles and generally higher overshoot compared to the majority of algorithms across both scenarios.
Figures 4 and 5 present the step response performances of the optimisation algorithms (GA, PSO, SFLA, FA, ABC, SA and IWOA) for Cases 1 and 2, respectively. These figures utilise the optimal

Step response of the motor speed control system in Case 1 using various optimisation algorithms (ABC, PSO, SFLA, FA, IWO, GA and SA). The plot illustrates the transient and steady-state characteristics, with ABC showing the highest overshoot and other algorithms converging closely to the reference after 2 s.

Step response of the motor speed control system in Case 2 for various optimisation algorithms (ABC, PSO, SFLA, FA, IWO, GA and SA). The responses show minimal overshoot and fast settling for all methods, with PSO and IWO achieving slightly smoother convergence to the reference signal, indicating strong control stability and precision in this scenario.
From Figures 4 and 5, the step response graphs for Cases 1 and 2 show that all optimisation algorithms successfully tune the PID controller for steady motor speed regulation.
In Case 1, transitory characteristics such as overshoot and settling time fluctuate significantly. ABC has the most overshoot, indicating aggressive control action, whereas IWO and PSO settle faster with smoother responses, showing a good balance of exploration and exploitation. SFLA and GA respond slowly, indicating more cautious tuning behaviour.
In Case 2, which appears to be a simpler control scenario, all algorithms produce almost identical responses with low overshoot and rapid convergence, indicating that the control task is less complex. Notably, PSO and IWO have somewhat smoother trajectories, demonstrating their consistent performance across conditions. These results imply that IWO and PSO perform well in terms of transient response quality and convergence behaviour.
Figures 6 and 7 illustrate the distribution of ITAE values for each algorithm in Cases 1 and 2 from the first iteration, highlighting notable variance in performance consistency, particularly for the ABC algorithm.
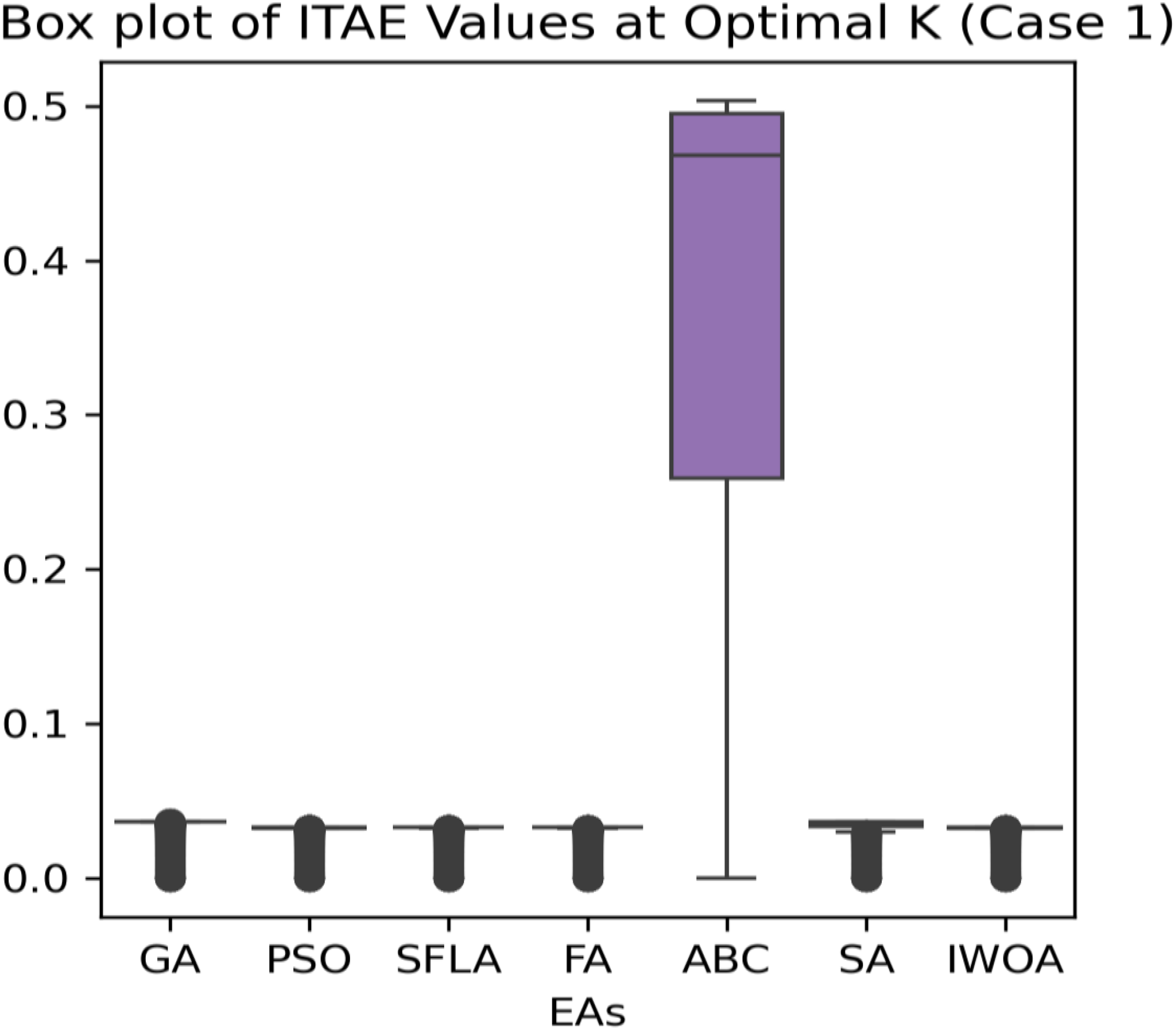
Box plot of ITAE values at optimal PID gains (Case 1) for various evolutionary algorithms. The ABC algorithm exhibits significantly higher variance and median ITAE values, indicating poor consistency and suboptimal tuning compared to the other methods. In contrast, PSO, IWOA and GA show tightly clustered distributions near zero, reflecting superior precision and stability in control performance.

Box plot of ITAE values at optimal PID gains (Case 2) for various evolutionary algorithms (EAs). The plot compares the control performance variability among seven EAs: GA, PSO, SFLA, FA, ABC, SA and IWOA. While GA, PSO, SFLA, FA and SA exhibit minimal dispersion and low ITAE values, indicating consistent performance, ABC shows a high median ITAE with substantial variability and outliers. IWOA also displays moderate dispersion, but with lower ITAE values than ABC, reflecting more stable yet slightly varied control behaviour.
Figures 6 and 7 show the box plots comparing the ITAE for the EAs with optimal PID gains from the first iteration in Cases 1 and 2. In Case 1, PSO, GA, IWOA, SFLA, FA and SA have low ITAE values with minimal spreads, indicating outstanding precision and consistency in achieving optimal control performance. In contrast, the ABC algorithm has a substantially larger spread and a higher median, indicating worse reliability and greater performance variability. This implies that, while most algorithms achieved stable tuning, ABC was less effective in converging to consistent optimal solutions. In Case 2, GA, PSO, SFLA, FA and SA have excellent and consistent control performance, as evidenced by their tightly clustered ITAE values near zero and minimum fluctuation. IWOA has moderate variability, indicating significantly less stable performance but still typically successful. In contrast, ABC performs badly, with the highest ITAE values and significant dispersion, indicating inconsistent and inadequate control behaviour.
Discussion
This study presents a rigorous comparative evaluation of seven EAs for optimising PID controller gain in DC motor speed control. The algorithms were tested under conservative (Case 1) and aggressive (Case 2) tuning conditions to determine computational efficiency, control accuracy and solution consistency. The findings highlight the fundamental trade-off between execution time and control quality, offering vital recommendations for algorithm selection based on real-time or offline application requirements.
The results demonstrated varied levels of performance. The IWOA consistently provided the fastest execution times in both cases, owing to its adaptive dispersal and colonisation mechanisms, which promote rapid global exploration. However, this speed came at the cost of control performance. IWOA had higher mean ITAE values and variation, particularly in Case 2, indicating a sensitivity to premature convergence and limited exploitation depth.
In contrast, PSO achieved a compelling balance between efficiency and control accuracy. The swarm-based search of the PSO, which combines global and local dynamics, produced low ITAE values and decreased variability, demonstrating its suitability for consistent and precise PID tuning. This qualifies PSO as an excellent alternative for applications that require both real-time responsiveness and high-quality control performance.
Other algorithms, such as SA and the FA, produced high-quality and reliable results, but at an enormous computational cost. Their exploratory processes, which are based on probabilistic transitions and attractiveness modelling, make them ideal for detailed offline optimisation tasks but unsuitable for real-time control. In contrast, the ABC algorithm has repeatedly underperformed. Its inconsistent and unsatisfactory solutions, typified by imbalanced gain selection (such as excessive derivative gain and underpowered proportional/integral terms), indicate that its foraging-based search dynamics are poorly adapted to the structure of the PID control environment.
These findings have significant implications for practical control design. For real-time applications, IWOA and PSO present intriguing trade-offs, whereas SA and FA may be chosen in offline scenarios when optimality outweighs time limitations. The poor performance of ABC greatly discourages its employment in similar control scenarios.
Methodologically, this study presents a statistically rigorous benchmarking framework for EA comparison, using ANOVA, Tukey's HSD and Cohen's d to determine both statistical significance and practical effect size. This method goes beyond traditional performance reporting to promote evidence-based optimisation plan selection.
Despite the quality of the findings, some limitations exist. The study was carried out using a typical linear DC motor model, which excluded real-world nonlinearities including saturation, backlash and thermal drift. Furthermore, the algorithmic hyperparameters were set using literature and preliminary testing rather than extensive calibration, which may constrain the full performance potential of each method.
Based on these findings, a hybrid optimisation framework that strategically blends IWOA and PSO represents a highly promising future direction. In such a scheme, IWOA could provide rapid global search in early iterations, identifying promising solution regions, while PSO could execute fine-grained exploitation to refine the controller gains. This IWOA–PSO hybrid could offer an optimal balance between computational speed and solution accuracy.
Furthermore, incorporating this hybrid technique into an ensemble-based adaptive control system could increase flexibility and resilience. Ensemble approaches that dynamically select, blend or prioritise algorithms in response to runtime conditions, potentially through reinforcement learning or algorithm portfolios could result in a self-tuning optimisation mechanism. Such a method meets modern control requirements for adaptability, scalability and robustness in complex electromechanical systems.
Conclusion
This study presented a comprehensive and statistically rigorous comparison of seven EAs (GA, PSO, SFLA, FA, ABC, SA and IWOA) for optimising PID controller gains in DC motor speed regulation. The study was conducted under both conservative and aggressive tuning scenarios to reflect a variety of control priorities, ranging from stability to responsiveness. Using a robust statistical framework that includes ANOVA, Tukey's HSD and Cohen's d effect size analyses, the study identified significant variations in algorithmic performance across multiple dimensions, including computing efficiency, control accuracy and outcome consistency.
Among the investigated techniques, IWOA and PSO were the most computationally efficient, with the shortest execution times in both tuning scenarios. While IWOA displayed faster performance, PSO provided a superior trade-off by maintaining excellent solution quality and low variability in control performance. Algorithms like FA and SA were capable of producing highly accurate and consistent tuning results; however, their high computational demands make them less suitable for real-time applications. The ABC algorithm frequently underperformed, yielding control parameters with significant variability and inferior precision, highlighting its limited applicability for this type of optimisation problem.
Although the study evaluates computational efficiency to infer potential real-time applicability, no hardware-in-the-loop experiments were conducted. Therefore, direct claims regarding real-time deployment should be tempered and further experimental validation is required. Future research should focus on implementing the optimisation framework in real-time embedded control systems and hardware-in-the-loop environments to assess practical feasibility, response dynamics and robustness under real-world operating conditions.
Going forward, the findings strongly encourage the development of hybrid and ensemble optimisation methods. A particularly intriguing option is the combination of IWOA and PSO into a single hybrid framework that synergises the rapid global search of IWOA with the robust local exploitation of PSO. This hybrid technique has the potential to enhance adaptive control systems by combining computational efficiency with improved solution refinement. Further extensions could include deploying the framework in hardware-in-the-loop settings, integrating fractional or nonlinear control structures and exploring reinforcement learning-based adaptive optimisation, which would expand the applicability of metaheuristic PID tuning in complex electromechanical systems.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received financial support for the research and publication of this article from Tshwane University of Technology, Pretoria, South Africa
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Data availability
Competing interests
The authors declare no competing interests.