This paper presents and analyzes an affine-scaling interior-point algorithm with a filter line-search method for solving nonlinear optimization problems with nonlinear equality constraints and nonnegative variables. In our scheme, we require that a damped Newton’s method is applied to the perturbed first-order necessary conditions to produce a search direction. Some filtered rules for a fixed barrier parameter are used to determine step acceptance. Second-order correction technique is used to reduce infeasibility and overcome the Maratos effect. The global convergence and fast local convergence rate of the proposed algorithm are established under some suitable conditions.
The optimization problem considered in this paper is
where and with are twice continuously differentiable.
Filter methods have been applied in many current optimization techniques (see e.g. Arzani and Peyghami,1 Eichfelder et al.,2 and Li and Zhu3). Interior-point methods compute a step by solving a linear system. Researchers have extended filter methods to interior-point methods. Ulbrich et al.4 and Wätcher and Biegler5,6 developed convergence theory for interior-point filter methods. Ulbrich et al. decomposed the primal-dual step obtained from the perturbed first-order necessary conditions into a normal and a tangential step, whose sizes were controlled by a trust-region type parameter. However, replacing the objective by the optimality measure means that the algorithm may be more likely to converge to stationary points that are not local minimizers. Wätcher and Biegler proposed a filter method framework which was based on line search and could be applied to barrier interior-point methods as well as active set SQP methods. Their search direction is obtained by calculating the quadratic subproblem, which is known to involve a large amount of calculation. Wätcher and Biegler’s interior-point method avoids the pitfall of many interior-point methods that may converge to spurious stationary points (see Wätcher and Biegler5,6 and Vicente7).
In this paper, we propose a new affine-scaling interior-point filter line search method for solving the optimization (1.1). Different from the method provided by Wätcher and Biegler,6 we combine with an affine-scaling strategy and obtain a search direction by solving linear equations. Using this technique, the computation of the algorithm is relatively small. In the case of local convergence, we show that the proposed method has quadratic convergence rate. The paper is organized as follows. Section “The basic algorithm” presents the overall algorithm, including the affine-scaling barrier method and the filter line-search procedure. In section “Convergence analysis,” global and local convergence properties of the proposed algorithm are established.
Throughout the paper, the element of a sequence is denoted by a subscript (e.g. ). In particular, is denoted by and by where is the Jacobian of The th component of a vector is written as .
The basic algorithm
In this section, we modify and improve an existing interior-point line search algorithm, which is formally summarized in section “The basic algorithm.”
where and are the Lagrangian multipliers. The Karush-Kuhn-Tucher (K-K-T) conditions of this problem can be written as
and where for a vector stands for the vector of all ones for appropriate dimension. By introducing a diagonal scaling matrix with
we can obtain a modified K-K-T conditions in the form
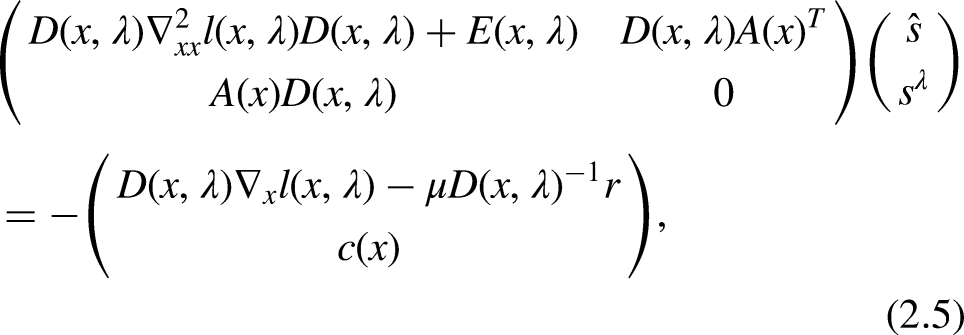
and where is a non-negative number. Note that the equations for together with “” are the K-K-T conditions of the original problem (1.1). Furthermore, the modified Newton step for (2.4) satisfies
where and with
On the other hand, as a barrier method, the proposed algorithm computes (approximate) solutions for a sequence of barrier problems
with the barrier parameter sequence , which is driven to zero. Let be the Lagrangian function for the problems (2.6) defined by Since we can write (2.5) as
Optimality conditions for problem (1.1) are well established by (2.4) for A feasible point is said to be the stationary point for problem (1.1), if there exists a vector such that
Strict complementarity is said to hold at if one and only one of the two inequalities and () holds, that is, If the pair satisfies strict complementarity, the second order sufficient conditions are equivalent to (2.8) and the positive definiteness of on the null space of
Under the standard Newton’s method assumptions for problem (1.1) , we have that the matrix
is nonsingular. The proof is given by [Vicente,8 prop. 3.3].
Therefore, the form of the coefficient matrix in (2.7) and the standard Newton’s method assumptions imply that the affine-scaling interior-point Newton algorithm is well defined in a neighborhood of a nondegenerate regular point that satisfies the second-order sufficient optimality conditions.
The filter line-search method and second-order correction steps
We view (2.6) as a bi-objective optimization problem that minimizes the objective function and the constraint violation where is a given fixed value of the barrier parameter . We apply the filter technique developed and analyzed in section 2. and Section 3. by Wätcher and Biegler6 to solve the barrier problem (2.6) and replace all occurrences of “” by “.” Using the transformation , (2.7) implies that
the switching condition (9) by Wätcher and Biegler6 holds if the projection of the top-left matrix in (2.7) onto the null space of is uniformly positive definite and a feasible non-optimal point is approached. However, the Armijo condition (11) by Wätcher and Biegler6 prevents the method from converging to such a point.
Since is positive at the optimal solution of the barrier problem (2.6), this property is maintained for all iterates. Therefore, in order for to be strictly feasible, is chosen to satisfy where the parameter is defined by
with . Here, given an initial value for the barrier parameter the parameter is obtained from
with constants and Obviously the barrier parameter is eventually decreased at a superlinear rate and ensures that numerical difficulties are avoided at the end of the optimization procedure. More precisely, we choose
Hence, there exists such that
According to the Newton’s method assumptions for problem (1.1), there exists satisfying the K-K-T conditions (2.8). Since the strict complementarity of problem (1.1) holds at we have Pick
Define the set of active indices
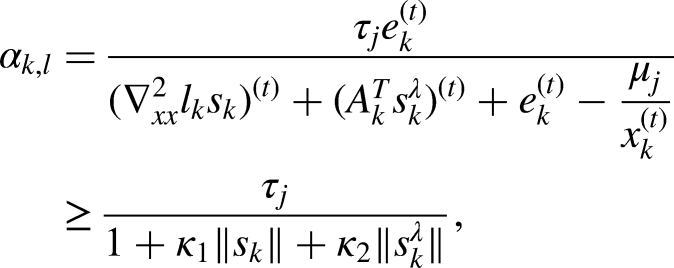
If then Since and is an interior-point, we have and then Using (2.13), we can obtain
If then Since we have The first equation in (2.5) implies that
where and are positive constants and independent of and we use in the first inequality.
Combining with formula (18) by Wätcher and Biegler,6 we can summarize this in the following formula for a minimal trial step size
with a “safety factor” When becomes smaller than , the algorithm reverts to feasibility restoration phase.
Consider that the filter approach can suffer from the Maratos effect and improve the search direction by means of a second-order correction. If the first trial step size has been rejected, we compute a second-order correction
where denotes the pseudo-inverse of Therefore, can be written as
where and is defined by (2.7). Note that has the property that satisfies a linearization of the constraints at the point , that is,
If is a second-order correction step, and is an additional second-order correction step, then can be understood as a single second-order correction step for Similarly, several consecutive correction steps can be considered as a single one.
The basic algorithm
The algorithm contains an inner and an outer loop. Using the individual parts of (2.4), we define the optimality error for the barrier problem as
By we denote (2.20) with this measures the optimality error for the original problem (1.1). The overall algorithm terminates if an approximate solution satisfying is found, where is the user provided error tolerance. We denote the iteration counter by for the “outer loop” and require that the approximate solution of the barrier problem (2.6), for a given value of satisfies the tolerance for a constant before the algorithm continues with the solution of the next barrier problem. A precise description of the algorithm follows.
Algorithm I
Initialize. Give starting point with ; Initialize the filter } and the iteration counter and Obtain from (2.10).
Check convergence for the overall problem. If , stop;
Check convergence for the barrier problem. If , then:
If repeat step 3, if not, then go to the next step.
Compute search direction. Compute by solving the linear system
where is the Hessian matrix or its approximation. Then compute by setting If the linear system is detected to be too ill-conditioned, go to feasibility restoration phase.
Backtracking line search.
Set and .
Compute new trial point .
Check acceptability to the filter. If reject the trial step size and go to 5.5.
Check sufficient decrease with respect to current iterate.
Case I: and
holds: If the Armijo condition
holds and , accept the trial step and go to step 6. Otherwise, go to step 5.5.
holds and , accept the trial step and go to step 6. Otherwise, go to step 5.5.
Compute second-order correction step. If , go to step 5.8. Otherwise, compute the second-order correction step by (2.17), and obtain the next new trial point
Check acceptability to the filter. If , reject the second-order correction step and go to the step 5.8.
Check sufficient decrease with respect to current iterate.
holds and , accept and go to step 6. Otherwise, go to step 5.8.
Set and If with defined in (2.15), go to the feasibility phase. Otherwise, go back to step 5.2.
Accept trial point. Set and .
Augment the filter if necessary. If (2.20) or (2.21) does not hold for , augment the filter using Otherwise, set .
Set:, go to step 2.
Feasibility restoration phase. Augment the filter, and compute a new iterate by decreasing the infeasibility measure , so that satisfies the sufficient decrease conditions (2.22) and is acceptable to the filter. Continue with the regular iteration in step 9.
Convergence analysis
We denote by the set of indices of those iterations in which the filter has been augmented, by that of all iterations indices in which the feasibility restoration phase is invoked, and by that of those iteration counters in which the restoration phase is invoked from step 4. Obviously, the relationship holds. For the global convergence analysis of this algorithm, we state the following assumptions.
Assumptions G. Let be the sequence generated by Algorithm I, where we assume that the feasibility restoration phase in step 10 always terminates successfully and the algorithm does not stop in step 2.
and are differentiable on an open set , where with for all . For and , their function values and their first derivatives are bounded and Lipschitz-continuous over .
The matrices are uniformly bounded for all
The Hessian approximations are uniformly positive definite on the null subspace of . In other words, there exists a constant so that for all
where is the minimum eigenvalue of matrix , the columns of form an orthonormal basis matrix of the null space of
The matrices have full column rank over . Norm sequences are bounded for all .
There exists a constant so that whenever
The iterates are bounded.
There exist constants so that whenever the restoration phase is called in step 10 in an iteration with it returns a new iterate with for all components satisfying
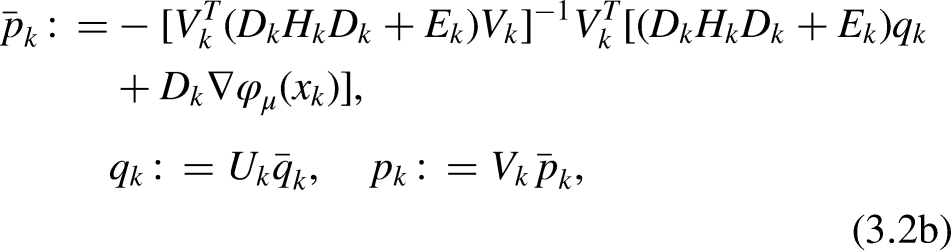
Using the QR-factorization of , we can obtain matrices and . The columns of form an orthonormal basis of . Set
the overall search direction can be taken, where and are two orthogonal components.
We define the criticality measure as
Consider a subsequence of iterates with and for some feasible limit point . Using the definition of we get for sufficiently large. Assumption (G4) and (3.2a) imply that Therefore, from Assumption (G3) we obtain Therefore, defined in this way is an optimality measure for the barrier problem (2.6).
The following lemma can be found by Wätcher and Biegler6 and indicates that the iterates generated by Algorithm I (for the barrier algorithm) are bounded away from the boundary of the region defined by the constraints .
Suppose Assumptions G hold. Then there exists a constant so that for all
Suppose Assumptions G hold. Then there exist constants , such that for all where
The proofs are similar to those of Lemma 1 by Wätcher and Biegler6 and are omitted.
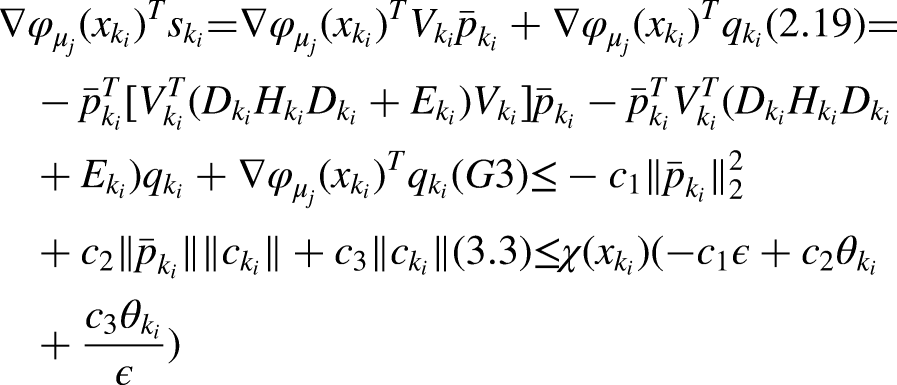
Suppose Assumptions G hold. If is a subsequence of iterates for which with a constant independent of , then there exist constants , such that
for all
Consider a subset of iterates with . Then, by Assumption (G4), for all with we have . Since (3.2a) implies that it follows that for
for some constants If we now define , it follows for all with that The claim follows after defining . □
We can build on the previous lemmas and use the same arguments as in the proof of Theorem 2 by Wätcher and Biegler6 to prove the following global convergence result for the proposed method.
Suppose Assumptions G hold. Then
The local convergence analysis of the algorithm is based on the necessary assumptions as follows:
Assumptions L. Assume that converges to a local solution of problem (1.1). Assume furthermore that the standard Newton’s method assumptions and the following hold.
In (2.19), is uniformly positive definite on the null space of as well as bounded.
Define Since
condition (3.5) could be written as follows:
which mean
If Assumptions L hold, then there exists a neighborhood of , so that for all we have
The proof is essentially identical to that of Lemma 4.1 by Wätcher and Biegler.5 which implies (3.7) by (2.16). Since
for close to , where noting that is Lipschitz-continuous, the claim follows. □
Suppose Assumptions L hold and the strict complementarity of problem (1.1) holds at the limit point of . Then there exists a neighborhood of so that whenever (2.20) holds for , the Armijo condition (2.23) is satisfied.
Let the step size scalar along to the boundary of the inequality constraints . Because the strict complementarity of problem (1.1) holds at the limit point of we have that Pick
If then and then imply that both and hold. Since is bounded, we can obtain from (2.13)
If then Since we have and Since for sufficiently large and , we deduce that, for sufficiently large
From the above discussion, we have obtained that if the step size is given in (2.13), then the step size will be determined in (2.20) and (2.21). Therefore, we will show that whenever (2.20) holds for , the Armijo condition (2.23) is satisfied.
First, we try to get the relationship between , and Choose to be the neighborhood from Lemma 3.4. From the switching condition (2.20), we have
since and is uniformly bounded in . From (3.2a) and (3.9), it is easy to verify that
and therefore On the other hand, we can get Furthermore, we can easily get
and
simply that
where Since as , the proposed algorithm implies the Armijo condition (2.23) with because of Assumption (L1) and , if is sufficiently close to . □
In the following, we employ the exact penalty function and the model of the penalty function to prove the local convergence results and to regard the effect of second-order correction steps. The algorithm never refers to them.
Suppose Assumptions L hold. Then there exists a neighborhood and a constant , so that for all we have
Since
choosing we obtain which follows the required latter inequality. Further, we have that
The last inequity is induced by using and Assumption (L1). Then defining , we get our desired results. □
For the necessary of showing the main local convergence theorem, we define constants with:
Suppose Assumptions L hold. Then there exists a neighborhood and constants , so that for all , we have
Using the definitions of , we get
It follows that From
the claim (3.14b) follows. Note that and . Hence, we have . Combine the definition of to get (3.14c). □
The following result corresponds to the result that Wätcher and Biegler5 obtained for the local version of the line search filter methods. The proof is similar and is omitted.
Suppose Assumptions L hold. Then, for sufficiently large, full steps of the form or are taken.
Suppose Assumptions L hold. Then, for sufficiently large, converges to superlinearly. Furthermore, if then converges to quadratically.
According to Theorem 3.2, for sufficiently large, full steps of the form or are taken in Algorithm I. We start by showing the statements being true for
For the analysis below, it is convenient to use the following notations: and
Hence, Since
we can obtain Applying Theorem 3 by Yamashita and Yabe,9 one can show that the sequence converges superlinearly to that is, which indicates that
We now consider the second case that full steps of the form are taken. Since for all large we have for some positive constant Therefore, (3.7) yields Further, we get Hence, (3.15) implies that:
If we can get and further
Hence, we can have which implies that
□
Footnotes
Declaration of conflicting interests
The author(s) declare no potential conflicts of interest with respect to the research, authorship, and publication of this article.
Funding
This work was supported by Hunan Provincial Education Science “14-th Five-Year Plan” Annual Project (no. XJK21BGD032-ND214029).
ORCID iD
Zhujun Wang
References
1.
ArzaniFPeyghamiMR. An approach based on dwindling filter method for positive definite generalized eigenvalue problem. Comp Appl Math2018; 37(2): 1197–1212.
2.
EichfelderGKlamrothKNieblingJ. Nonconvex constrained optimization by a filtering branch and bound. J Global Optim2021; 80: 31–61.
3.
LiDZhuDT. An affine-scaling interior trust-region method combining with line search filter technique for optimization subject to bounds on variables. Numer Algor2018; 77(4): 1159–1182.
4.
UlbrichMUlbrichSVicenteLN. A globally convergent primal-dual interior-point filter method for nonconvex nonlinear programming. Math Program., Series B2004; 100: 217–245.
5.
WächterABieglerLT. Line search filter methods for nonlinear programming: Local convergence. SIAM J Optim2005; 16(1): 32–48.
6.
WächterABieglerLT. Line search filter methods for nonlinear programming: Motivation and global convergence. SIAM J Optim2005; 16(1): 1–31.
7.
WächterABieglerLT. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math Program2006; 106: 22–57.
8.
VicenteLN. On interior-point newton algorithms for discretized optimal control problems with state constraints. Optim Methods Softw1998; 8(3): 249–275.
9.
YamashitaHYabeH. Superlinear and quadratic convergence of some primal-dual interior-point methods for constrained optimization. Math Program1996; 75: 377–397.