We present a convergence analysis for a finite difference scheme for the time dependent partial different equation called gradient flow associated with the Rudin-Osher-Fetami model. We devise an iterative algorithm to compute the solution of the finite difference scheme and prove the convergence of the iterative algorithm. Finally computational experiments are shown to demonstrate the convergence of the finite difference scheme.
The well-known ROF model may be approximated in the following way
As , the above minimizing functional is differentiable. Thus, the Euler-Lagrange equation associated with the above minimization is
Solution of this partial differential equation can be further approximated. Let us consider the time evolution version of the PDE:
where is the outward normal derivative operator. It is called the gradient flow of (1). When ϵ = 0, it is called TV flow. When using ROF for the purpose of denoising image, f is a given noised image, and u is the denoised image. Similar partial differential equations also appear in geometry analysis. See references, e.g., Lichnewsky and Temam,1 Gerhardt,2 Andreu et al.,3–5 and the references therein. The existence, uniqueness, stability of the weak solutions to these time dependent PDE were studied in the literature mentioned above. Numerical solution of the PDE (3) using finite elements has been discussed in Feng and Prohl6 and Feng et al.7 In particular, the researchers showed that the finite element solution exists, is unique, is convergent to the weak solution of the PDE (3), the rate of convergence under some sufficient conditions, and the computation is stable. Numerical solution to the weak solution using bivariate spline method and its convergence was studied in Hong et al.8 A fixed point iterative algorithm for the associated system of nonlinear equations was discussed in Vogel and Oman 9 and its convergence was studied in Dobson and Vogel.10 An algorithm based on the split Bregman iterations was discussed in Li et al.11 In Khan et al.12 gave an a mesh-free algorithm to solve the ROF model. Although the finite difference solution of the time dependent PDE (3) has been the method of choice for image denoising (e.g. See Vese and Osher13), no convergence of the finite difference solution to the weak solution of the PDE has been established in the literature so far to the best of the authorsal methods for p-harmo Feng and authors' knowledge Lai.
The purpose of this paper is to establish the convergence of the discrete solution obtained from a finite difference scheme for (3) to the weak solution. See our Theorem 3.4. Then we discuss how to numerically solve the time dependent PDE (3) by using our finite difference scheme. As the finite difference scheme is a system of nonlinear equations, we shall derive an iterative algorithm and show that the iterative solutions are convergent.
For convenience, let . We let N > 0 be a positive integer and divide y solve the time dependent xi = ih and yj = jh for where . For any f(x, y) defined on ve let . We shall use two different divided differences and to approximate the gradient operator. That is,
and
for all with for all j and for all i. Furthermore, we define discrete divergence operators and to approximate the continuous divergence operator, i.e., suppose the grid size is h > 0,
for all and similarly for . By their definitions, we have for every and
With these notations, we are able to define a finite difference scheme for numerical solution of the time dependent PDE (3).
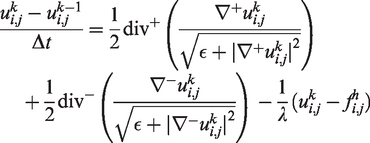
Next we discretize the time domain by equally-spaced points . We approximate the by to have the fully discrete version of finite difference scheme:
Remark 1.1.In our numerical scheme, the discrete variation for any arrayis in fact defined by
This way of defining discrete variation makes it possible to connect discrete and continuous variations by the observation thatwhere U is a piecewise linear function obtained by interpolating uk over grids on iecewise linear function obtained by interpolating ct discrete and continuous variations by the observation that rence scheme is a system of nonli
for each step k where
for all arrays.
We shall first show that the above scheme has a uniqueness solution. Then we show the solution in (5) converges to the weak solution of time dependent PDE (3). These will be done in the next 2 sections. Next we shall explain how to numerically solve this system of nonlinear equations in the Section 4. We report our computational results in the Section 5. Finally we give a few remarks the last section.
Preliminary results
We introduce a weak formulation of PDE (3) that is suggested by Feng and Prohl.6
Definition 2.1.We say thatis a weak solution of (3) if u satisfies the initial value and boundary conditions in (3) and for anywithfor all,
for any.
It is known (cf. Feng and Prohl6) there exists a unique weak solution satisfying the above weak formulation. is in fact in if and . Following the ideas in Lichnewsky and Temam,1 the researchers in Feng and Prohl6 further showed the weak solution can be characterized by the following inequality.
Theorem 2.1.Let u be a weak solution as in Definition 2.1. Then u satisfies the following inequality: for any,
for allwithfor all, where
On the other hand, if a functionsatisfies the above inequality (7), then u is a weak solution.
Regarding to the solution of finite difference scheme (5), we prove some basic properties in this section. To this end, we assume that the initial data for our numerical scheme is a discretization of the initial data for PDE (3). Specifically assuming the region is partitioned evenly into N by N grids with a grid size of , we suppose
i.e., the pixel value on each grid with index (i, j) is . In the next section we sometimes denote by a related piecewise constant function defined on Ω for which
Let us start with the following existence and uniqueness theorem.
Theorem 2.2.Fix N > 0 and M > 0. There exists a unique arraysatisfying the above system of nonlinear equations.
Proof. We define a variation functional that is a discretized version of (8)
and the discrete energy functional
for all arrays .
The Euler-Lagrange equation for the following minimization problem
is
The existence and uniqueness of follows from the strict convexity of the functional Jh and Eh.
The following property is a characterization of the discrete solution of (5).
Lemma 2.1.Suppose that arrayis a solution of the finite difference scheme (5). Thensatisfies the following inequality
for all arraysthat satisfies the Neumann boundary condition. On the other hand, if an arraysatisfies the above inequality for allsatisfying the discrete Neumann boundary condition in (5), then arrayis a solution of (5).
The result follows from the definition of subgradient .
The following result shows that the computation of finite difference scheme (5) is stable. For the simplicity of the notations, we define the discrete L2 norms in analogue of standard L2 norms. Assuming is an array, we define
Theorem 2.3.Letbe the solution of the system of nonlinear equations (5) associated with fh with initial value. Similarly, letbe the corresponding solution of (5) associated with gh with initial value. Then
Proof. We prove by induction. It is obvious true for k = 0. Assume the inequality holds for k . Assume the inequa L2 terms in (12). We have is the minimizer of the following problem.
where , and . By standard stability property of the minimization problem (16) (cf. Lucier and Wang14)
Remark 2.2.As a direct deduction, if, the solutionis also zero for all k, then
Main result and its proof
In this section, we shall show that the solution of the finite difference scheme (5) converges to the solution of the gradient flow (3). We suppose that the array is the solution of (5).
We first define a mapping of the array in the form of a piecewise linear interpolant of .
Let tN be the following type of triangulation of with vertices . Suppose the base functions of the finite element space are where is a scaled and translated standard box spline function with for any .
For any k, we define piecewise linear function on def
Having defined for on g defined cewise lin for by linear interpolating and on interval .
We need a sequence of useful lemmas in order to show that the solution of finite difference scheme (5) converges to the weak solution (6). We first show that the interpolant is TV monotone (We abuse a bit the notation of TV here since our includes not only a variation term but also an extra L2 term).
Lemma 3.2.
Proof. The proof is straightforward. First, it is easy to verify that the continuous variation equals the discrete variation . Then
Define
To prove (19) is equivalent to prove
Since uk is the minimizer of the following functional
we have
For each term in the summation of the L2 square term
Then
We conclude from (20) that
Lemma 3.3.Suppose. Thenfor a positive constant C only depending on u0 and f.
The equation holds element-wise at each index (i, j). For the equation at each index (i, j), we multiply both sides by and add the equations for all (i, j). We use inner product notation to write the result in a concise way:
By the definition of sub-differential
Note that
We have
Add the above inequalities for ,
It equals
This completes the proof.
Lemma 3.4.Suppose. Thenfor a constant C only dependent on f and u0.
Proof. We use (17) to bound . Recall . Letting , we have
This completes the proof.
In image analysis, the input image usually does not have much regularity. For example, most natural images do not even have weak derivatives. Therefore, to model images, we introduce the notation of Lipschitz space, and treat images as elements in this space.
Definition 3.2.Letbe a real number. A functionifand the following quantity
is finite, where. We let.
The parameter α is related to the quantityon mage usually does not have much regularity. For example, most natural ischitz spaces with larger α values.
Lemma 3.5.Define translation operatorsandby
Then
and similarly
Proof. We only prove the first inequality. Recall the Euler-Lagrange equation that
We write the equation element-wisely as
Then subtract the equation at index from the same equation at index (i, j) for ,
where is defined by
Equation (23) only holds for . Although equation (23) is not defined for , we can set and , and equation (23) still holds. we multiply (23) by and add all resulting equations for , then
We show next that the second term is no greater than zero. The third term can be proved to be nonpositive similarly. By definition of F,
Using summation by part,
Each term in the first sum is non-negative due to the fact that for any ,
By similar arguments, one has
It follows
We rewrite the sums in form of discrete integrals and discrete inner products, and apply Cauchy-Schwartz inequality
Rearrange and combine similar terms to have
We now prove the following inequality by induction
It is obvious true for k = 0. Assuming the inequality holds for k. Assuming the inequality holds hods for k by (24). Therefore, one has
This completes the proof.
We also define a piecewise constant function in a similar way to the definition of . First we define for
Then we define for by interpolating and :
We are now ready to show
Lemma 3.6.Suppose.
for a positive constant C dependent only on f and u0.
Proof. Let . For any x, g(x, t) is a linear function of t. A direct calculation shows
Adding the inequality for , we have
Then we only need to bound . We note that g(x, t) is a piecewise linear function of x on each sub-grid for any t. Tedious calculation gives
The last line follows from Lemma 3.5. We substitute the bound for the in inequality (26) to complete the proof.
Finally we are ready to prove the main result of this section.
Theorem 3.4.Suppose that. Furthermore, suppose that. If we choose, then there exists a functioninso thatconverge toweakly asandis the weak solution of (3).
Proof. By Lemma 3.4, there exists a weakly convergent subsequence of in . For convenience, we assume the whole sequence converges to weakly. We now show is the weak solution of the gradient flow (2.1). As the weak solution is unique, the whole sequence converges weakly to .
Let us outline the main ideas of the proof. By using Theorem 2.1, we need to show that satisfies the following inequality
for all with for all , where
By the lower semi-continuity of J, we have
and
We now prove the following inequality to finish the proof.
where is an error term that goes to zero as . Itan error term that goes to z (cf. Feng and Prohl6) that the above inequality is equivalent to
Since is in the finite element space associated with triangulation N, we replace the original test function in (30) with a test function that is in and introduce an error .
It is easy to show tends to zero as N goes to infinity by standard density argumentation. Thus we only need to prove
for all test functions v in where tends to zero as .
Let us verify the key inequality (31). We first prove the inequality for t = tk. Consider the integrand of the left side of (31) for t = tk. For a continuous piecewise linear function , assuming , we have
We need to replace the continuous integral in (32) by a discrete summation with some error. Let be a piecewise constant function defined by
and be the piecewise constant projection of f as defined in (9). Replacing f and v by PNf and respectively, we have
It is a standard analysis that the second term on the right-hand side converges to zero as and in . We omit the detail here. Then
where denotes the error dependent on N that is convergent to zero when . Similarly, we have
with error term that converges to zero as by Lemma 3.6.
We remind the reader that that for ,
Then
Replacing by respectively, we have
where stands for another error term that can be bounded by Lemma 3.6. Note that we have to use Cauchy-Schwartz inequality to show that goes to zero at the rate of . By one of the assumptions, we know when .
We put all the estimates above together to have
Note that the first 7 terms on the right-hand side above are nonnegative by inequality (14) in Lemma 2.1. Then
Thus inequality (31) for t = tk is proved.
Now we consider the inequality when . Note that
For , we use (33) to have
We bound by
The last line comes from Lemma 3.3.
For the variation term, we have
To bound , we use the monotonicity of the variation term in Lemma 3.2.
By the convexity of J
We conclude that tends to zero as approaches zero. Collecting these results together, we proved inequality (31) for .
Numerical solution of our finite difference scheme
The system (5) of nonlinear equations has been solved by many methods as explained in Vogel and Oman.9 In Dobson and Vogel,10 the researchers provided an analysis of a fixed point method proposed in Vogel and Oman9 based on auxiliary variable and functionals and proved that the iterative method converges. In this section, we mainly present another method to show the convergence of the fixed point method. From notation simplicity, we assume the grid size h = 1 in this section that has no influence in the convergence analysis of our algorithm.
First of all, let us explain the fixed point method. Recall that we need to solve from the following equations
assuming that we have the solution . Let us define an iterative algorithm to compute .
Algorithm 4.1.Starting with, for, we compute
together with boundary conditions in (5).
We now show that the iterative solutions converge. Indeed, we first have
Lemma 4.7.There exists a positive constant C dependent only on f and initial valuessuch that
for all.
Proof. Multiplying to the equation (34) and summing over , we have
By using the Cauchy-Schwartz equality, it follows that
Hence, is bounded by a constant C independent of .
It follows that the sequence of vectors contains a convergent subsequence. Let us say the vectors converge to . Next we claim that the whole sequence converges. To prove this claim, we recall the energy functional
where
Let us prove the following lemma
Lemma 4.8.For all, we have
Proof. Fix . For the terms in , we first consider
To estimate the second term on the right-hand side of the equation above, we multiply to the equation (34) and sum over to have
Note that it is easy to see
Similar for other term involving .
Next we consider
Finally we can easily verify the following inequality
Similar for the terms involving . We now add all equalities and inequalities (39), (40), (41) together to have
This completes the proof.
We are now ready to prove the main result in this subsection.
Theorem 4.5.The iterative solutions defined in Algorithm 4.1 converge to the solution of (5) for any fixed, h > 0, and.
Proof. We have already shown that the iterative solution vectors have a convergent subsequence to a vector . It is easy to see that the energies are also convergent to . By Lemma 4.8, we know that energies are decreasing for all and hence, decrease to . By using Lemma 4.8 again, we see . Thus, are also convergent to . The uniqueness of the solution of (5) implies that is the solution vector .
Numerical experiments
In this section we carry out two numerical experiments. First we demonstrate the convergence of our Algorithm 4.1. Second we apply our algorithm to approximate the solution of (3) on a given time interval. We have implemented the algorithms in MATLAB.
Convergence of Algorithm 4.1
According to Theorem 4.5, given any , h > 0, , and , Algorithm 4.1 will generate a convergence sequence , which converges of (5).
We first generate two random arrays and using Matlab function rand(). Then according to (5) we can calculate . With and fh at hands, we iterate according to Algorithm 4.1, with . We show that vl converges to uk, as , in a proper norm.
To show that the convergence doesnculate imate small , we use the following pramaters: .
The log of the errors and are plotted against the iteration counts in Figure 2.
A triangulation.
The log profiles of the error and relative errors in Algorithm 4.1, with . (a) . (b) .
Approximation of the solution of (3)
One major difficulty to approximate the solution of (3) is, while our algorithm convergences to uk of (5) for each k, the solutions of (5) and (3) are different. We have proved in Theorem 3.4 that, when the grid size of space domain and , the discrete solution of (5) converges to the weak solution of (3). However, in reality, it is not easy to obtain data of abitrary small h. For example, if fh is a discrete image, then h is fixed to be 1. Therefore, in this experiment, we fix h = 1, and make go to 0.
Consider the exact solution of (3)
for and . It is straightforward to calculate from the time dependent PDE (3) the corresponding function f with .
We use a uniform mesh (Figure 1) to discretize the space domain, leading to a set of 51 dent PDE (3) the
On the time domain, we use a uniform step size , and denote . We set as an initial value. Evolving (5) according to Algorithm 4.1, we get an approximation on grid points .
We compare our approximation with the exact solution of (3) at time t = 10, that is, compare with
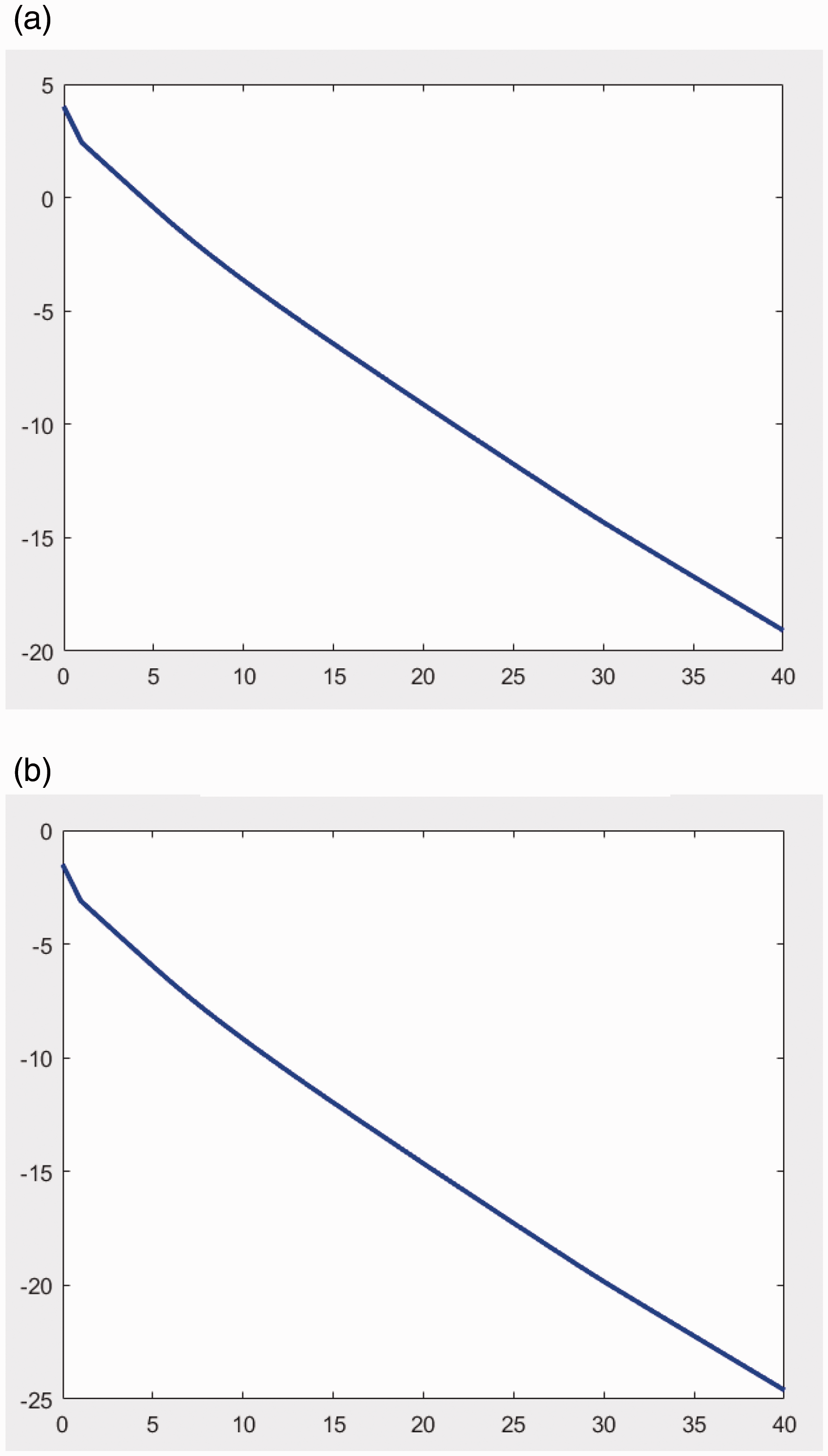
To test the convergence of the algorithm as , we compute on a sequence of decreasing time step sizes , where . The errors are measured in terms of the following norm:
Theoretically, for t > 0, the error will not go to zero, because according to Theorem 4.5, as goes to the discrete solution of (5) rather than u, which is the exact solution of (3). However, by Theorem 3.4, we should observe that converges to a relatively small positive number. It would be ideal, if we could establish an upper bound of the difference between the solutions of (5) and (3). It needs some further study on this matter.
The results of our experiments are illustrated in Figure 3, where the log of the errors and are plotted as functions of M respectively. We observe that our algorithm converges quickly after M = 30, in all measures.
This graph demonstrates the convergence. (a) . (b) .
Conclusions
We end this paper with a few remarks.
Remark 6.3.P. Perona and J. Malik proposed a non-stationary PDE model in Parona and Malik15to remove noises by using anisotropic diffusion. For a given noised image f, we find an improved image u by solving the following non-stationary PDE model with initial value f over time:
whereis a diffusive function which is a decreasing function satisfyingand. The following is a list of commonly used diffusive functions:
which is called Charbonnier diffusivity.
which was used in Parona and Malik.16 We may call it Perona-Malik diffusivity.
which is the standard Gaussian diffusivity function.
for.
For a fixed c(s), we solve u(T, x) for a large T such that the restored image u(T, x) is a satisfactory one. If we let T sufficiently large, u(T, x) starts a degradation such as some edges are lost or severally blurred.
It is clear when using the Charbonnier diffusivity, i.e.,, the PDE in (43) is very similar to the one in (3) with two distinct differences: one is T sufficientand the other one is to use the noised image f as an initial value. Our convergence analysis discussed in the previous two sections can be applied to the PM model with the special diffusive function c(s). In addition, the convexity of anti-derivative of c(s) plays a significant role in our analysis. For other diffusive functions, e.g., Perona-Malik diffusive function, we notice that the function C(s) such thatis not convex when. When, i.e.forfor some T > 0, C(s) is convex and our analysis can be used to show that the corresponding finite difference method is convergent.
Remark 6.4.Our convergence analysis is independent of ϵ. Thus, we can let ϵ = 0. Also, we can replace the integral with coefficientby the boundary integral. Then the time dependent PDE is associated with evolutionary surfaces with prescribed mean curvature as in Lichnewsky and Temam1and Gerhardt.2Our analysis can be used to show that the corresponding finite difference method for evolutionary surfaces of prescribed mean curvature is convergent to the pseudo-solution.
Remark 6.5.It is interesting to know the convergence rate of the finite difference solution to the weak solution of (3). The convergence rate of the fully discrete finite element solution was established in Feng et al.7 under a high regularity assumption on the noised image f, i.e.,and a very high regularity condition on domain d image. In general, an image function may not have such a high regularity. We hope to reduce the assumption on the regularities and give an estimate of convergence rate for the finite element solutions. These have to be left to the interested reader.
Footnotes
Acknowledgements
We sincerely thank our anonymous reviewers, whose reading and suggestions helped improve and clarify this manuscript a lot. The work described in this paper is supported by the Educational Research Project for Young and Middle-aged Teachers of Fujian Provincial Department of Education (Grant No. JT180042) and the National Natural Science Foundations of China (Grant No. 11771084, 61771141). This paper does not necessarily reflect the views of the funding agencies.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this paper is supported by the Educational Research Project for Young and Middle-aged Teachers of Fujian Provincial Department of Education (Grant No. JT180042) and the National Natural Science Foundations of China (Grant No. 11771084, 61771141). This paper does not necessarily reflect the views of the funding agencies.
ORCID iD
Qianying Hong
References
1.
LichnewskyATemamR.Pseudo-solution of the time dependent minimal surface problem. J Differ Equ1978;
30: 340–364.
2.
GerhardtC.Evolutionary surfaces of prescribed mean curvature. J Differ Equ1980;
36: 139–172.
3.
AndreuFBallesterCCasellesV, et al.
The Dirichlet problem for the total variation flow. J Funct Anal2001;
180: 347–403.
4.
AndreuFBallesterCCasellesV, et al.
Minimizing total variation flow. Differ Integral Equ2001;
14: 321–360.
5.
AndreuFCasellesVDíazJI, et al.
Some qualitative properties for the total variation flow. J Funct Anal2002;
188: 516–547.
6.
FengXProhlA.Analysis of total variation flow and its finite element approximations. Esaim Math Model Numer Anal2003;
37: 533–556.
7.
FengXvon OehsenMProhlA.Rate of convergence of regularization procedures and finite element approximations for the total variation flow. Numer Math2005;
100: 441–456.
8.
HongQLaiMMatambaL, et al.
Galerkin method with splines for total variation minimization. J Algorithm Comput Technol2019;
13: 1–16.
9.
VogelCROmanME.Iterative methods for total variation denoising. SIAM J Sci Comput1996;
17: 227–238.
10.
DobsonDCVogelCR.Convergence of an iterative method for total variation denoising. SIAM J Numer Anal1997;
34: 1779–1791.
11.
LiMHanCWangR, et al.
Shrinking gradient descent algorithms for total variation regularized image denoising. Comput Optim Appl2017;
68: 643–660.
VeseLOsherS.Numerical methods for p-harmonic flows and applications to image processing. SIAM J Numer Anal2002;
40: 2085–2104.
14.
LucierBWangJ.Error bounds for finite-difference methods for Rudin-Osher-Fatemi image smoothing. SIAM J Numer Anal2011;
49: 845–868.
15.
ParonaPMalikJ. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell1990;
12: 629–639.
16.
AcarRVogelCR.Analysis of bounded variation penalty methods for ill-posed problems. Inverse Probl1994;
10: 1217–1229.
17.
FengXYoonM.Finite element approximation of the gradient flow for a class of linear growth energies with applications to color image denoising. Int J Numer Anal Model2009;
6: 389–340.
18.
ChenDChenYQXueD.Fractional-Order total variation image restoration based on primal-dual algorithm. Abstr Appl Anal2013;
2013: 10.