
Abstract
A dynamic multi-objective genetic algorithm based on partial least squares prediction model (DNSGA-II-PLS) is presented in this paper to solve the mix traffic flow multi-objective timing optimization problem with time-varying traffic demand. Take motor vehicle delay, non-motor vehicle delay, and pedestrian delay as objectives to solve the problem. Make comparison with three improved dynamic multi-objective genetic algorithms based on prediction strategy: dynamic multi-objective evolutionary algorithm based on simple prediction (DNSGA-II-PREM), autonomous regression dynamic multi-objective evolutionary algorithm (DNSGA-II-AR), and mutation-based dynamic multi-objective evolutionary algorithm (DNSGA-II-MUT) under four kinds of test functions. The results show that compared with the other three algorithms, the DNSGA-II-PLS algorithm proposed in this paper shows better performance in convergence and distribution, and this algorithm has less complexity. Finally, taking the intersections of Taiping North Road and Zhujiang Road in Nanjing as the research object, the performance of the algorithm is tested under the simulation environment. The results show that compared with the DNSGA-II–AR, which has best performance among three compared algorithms, the proposed DNSGA-II-PLS algorithm can effectively reduce the delay of motor vehicles by 6.7%, non-motor vehicles by –2.8%, and pedestrian waiting time by 20.5%.
Keywords
Introduction
In China, the mixed traffic flow formed by motor vehicles, non-motor vehicles, and pedestrians is one of the main problems leading to serious traffic jam at the intersection. In addition, various kinds of complicated and unexpected factors under mixed traffic flow environment may cause serious interference to drivers and affect their driving behaviors. This may easily lead to errors of driver’s judgments and operation and result in traffic accidents. 1 Therefore, to solve the traffic congestion problem effectively in the cities of China, there is great practical significance to establish an optimal control method for traffic signal timing plan which is suitable for real-time control in China.
At present, among the researches on the optimization of mixed traffic flow signal timing around the world, one method is to consider a single optimization performance objective. For example, Liu et al. 2 constructed the optimal model of dynamic linear programing under the oversaturated condition with the objective of maximizing the capacity of intersections. Based on the arriving principle of motor vehicles flow between adjacent intersections, Wey 3 chooses the total vehicle delay of the flow in the control period as the goal to establish the control model and applies the improved simplex method to solve the problem. Another approach is to synthetically consider a number of performance indicators, and weighting sum method is used to form a general goal. Its essence is to transform the multi-objective optimization problems to single-objective optimization problems to solve. For example, on the basis of the delay model proposed by Akçelik R and Rouphail NM, 4 the delay model proposed by Wu 5 chooses three indicators as objective function, which is to maximize traffic capacity of signalized intersection, minimize average vehicle delay, and minimize the number of stopping at intersections, and the stability of traffic capacity is taken as the second objective function. Finally, it is converted into a total objective function by means of linear weighting; Zhang et al. 6 divide the objective function into two layers: the first one selects three performance indicators: average delay, parking number, and traffic capacity to optimize the traffic efficiency at the intersection, which is defined as the objective function of efficiency control. The second layer selects the standard deviation of vehicle delay to improve the stability of signal control, which is defined as the objective function of robust control. And then weighted sum of two objective functions is weighted by the weight coefficient variation method to construct the objective function. Although it is easier to solve the problem by transforming multi-objective to single-objective, it still belongs to the single-objective optimization model. From the optimization theory point of view, it cannot achieve the optimal or the most satisfactory multiple control objectives at the same time, and cannot analyze the relevance, validity among control objectives, and the sensitivity of control objectives against control parameters. 7
In addition, in the existing researches, the signal timing scheme is rarely designed from the perspective of dynamic model and dynamic algorithm to adapt to the dynamic and changing traffic demands. Ma et al. 8 comprehensively analyze the different traffic signal control performance indicators, taking into account the time efficiency of motor vehicles, pedestrian time efficiency, and environmental benefits, to build multi-objective signal timing optimization model, using multi-objective continuous ant colony optimization algorithm to get the optimization solution of timing plan. The results show that the proposed model can provide a number of different timing characteristics of the timing period to meet the needs of different traffic conditions. Li 9 establishes a signal timing optimization model at intersections with the consideration of both pedestrian and vehicle benefits and uses the model to analyze the change rules of vehicle capacity, pedestrian, and vehicle delays under different mixed traffic conditions. Besides, it studies the standards of pedestrian signal phase setting, which provides a theoretical basis for reasonably establishing the signal timing model of intersections under various traffic conditions. Xiao et al. 10 aim at the mixed traffic flow at the intersection, propose a hybrid traffic flow optimization control method based on high-dimensional multi-objective evolutionary algorithm, which provides five optimal control indicators to enhance the intersections signal control efficiency. Chen et al. 11 aim at optimizing the signal timing plan of a single intersection under mixed traffic conditions, constructs a multi-objective signal timing model, and designs a multi-objective hyper-volume evaluation algorithm to obtain a candidate timing scheme set, finally, using the minimum subjective and objective information deviation method to determine the best optimal timing scheme. Although all these studies have made a certain contribution, they all use static multi-objective optimization algorithms. Compared with dynamic multi-objective optimization algorithms, static multi-objective optimization algorithms are difficult to capture real-time circumstance under the dynamic traffic demand changing environment and respond promptly. Considering the fact that most of the researches on signal timing plan in mixed traffic flow are mostly focused on fixed-time control, and less consideration is given to the real-time changes of traffic flow behavior, in response to this problem, this paper presents a real-time optimization control algorithm for signal timing plan, through real-time monitoring of traffic flow changes, and using dynamic multi-objective optimization algorithm for optimizing intersection timing plan.
In solving multi-objective optimization problems, the non-dominated sorting algorithm (NSGA-II) proposed by Deb et al. 12 has been widely used due to the fact that it can reduce the complexity of non-inferior sequencing genetic algorithms and has the advantages of fast running speed and good convergence of solution sets and other advantages. In order to improve the passing efficiency of the single intersection and solve the serious congestion problem on the upstream intersection which caused by the queue vehicles overflowed from the oversaturated intersection, An et al.13 uses NSGA-II algorithm to optimize the timing plan for single oversaturated intersections by solving the multi-objective optimization model. Compared with the timing scheme obtained by the traditional F-B method (the theoretical method invented by British scholar F Webster-B Cobber), the multi-objective optimization model can be used to reduce the queuing length and delay time of oversaturated intersection and to reduce the overflow rate. Li 14 proposes a traffic signal control optimization algorithm based on NSGA-II in order to improve the efficiency of traffic signal control at oversaturated intersections, which shows good performance.
Based on the multi-objective evolutionary algorithm NSGA-II, this paper constructs the multi-objective dynamic model of single-intersection under mixed traffic environment with the goal of vehicle delay, non-motor vehicle delay, and traffic capacity at intersections. Aiming at presenting dynamic multi-objective evolutionary algorithm which cannot adapt to environment well and cannot convergence quickly, dynamic multi-objective evolutionary algorithm based on partial least squares prediction (DNSGA-II-PLS) is proposed by this paper. First, based on the classical test examples, the feasibility of the dynamic benchmarking algorithm is measured. Then, the DNSGA-II-PLS algorithm is used to get the optimized solution of the dynamic multi-objective timing model and obtain the candidate timing scheme sets under different time windows, and the Technique for Order Preference by Similarity to an Ideal Solution (TOPSIS) decision-making method is used to determine the final timing scheme. Then this paper tests the practicality of the DNSGA-II-PLS algorithm under the VISSIM and MATLAB integrated simulation platform.
Signal timing model of isolated intersection
Selection of performance indicators
Vehicle delay
The calculation of vehicle delays at intersections is currently widely using a mathematical analysis model in the Road Traffic Capacity Manual HCM2000. 15 However, due to the special traffic characteristics of the mixed traffic flow of urban road signal intersections in China, there are bicycles and pedestrians in all directions, not just motor vehicles. According to statistics, motor vehicle traffic, non-motorized traffic, and pedestrian traffic account for one-third of urban traffic in China. 16 Therefore, the mixed traffic flows interact with each other, resulting in more traffic conflict points. 10 HCM2000 is based on a series of assumptions, and the mathematical model is used to calculate the delay, which is difficult to fully reflect the actual situation of China’s mixed traffic flow.
In the calculation method of intersection delay commonly used in China, it is generally divided into two steps. In the first step, the average signal control delay for each vehicle on each entrance lane is estimated separately. It is the weighted average of the vehicle delays at the intersection due to signal control in the entrance lane. In the second step, according to the average signal control delay of each vehicle on the entrance road, the average signal control delay per vehicle of intersection is calculated. It is the weighted average of signal control delays of the average per vehicle of each entrance.
10
Every vehicle delay consists of the following three parts







Recommended value for single-intersection signal control type correction factor.


On the basis of calculating the delay 
On the basis of calculating every delay of import lane 

Non-motorized vehicle delay
At present, non-motorized vehicles in China are mainly bicycles (including electric bicycles), so this paper takes the average delay of the bicycles as the non-motor vehicle delay. Due to the interaction effect between the intersections, the bicycles arriving at each intersection have a cyclical fluctuation. The strength of this cyclical fluctuation is closely related to the distance between intersections. The greater the distance is, the smaller the intensity is. Besides, cyclical fluctuations can affect bicycle parking delays. The arrival of the downstream intersection can be predicted by the bicycle reaching and departure rule at the upstream intersection. Let the bicycle arrival flow at the downstream intersection be 
when 
When
Let 
Meanwhile, if bicycle flow arriving at the intersection is constantly changing, the average delay of bike at t can be expressed as

Pedestrian delay
This article assumes that the average pedestrian arrival time at the intersection is uniform, and the average waiting time of pedestrians is only related to the red light time of signal, it can be expressed as
10

Dynamic multi-objective signal optimization model for mixed traffic flow at intersections
Objective function. The above three evaluation indicators, which are the average delay of vehicles, the average delay of non-motor vehicles, and the pedestrian waiting time, reflect the service status of intersections from different angles. The three indicators represent the benefits of motor vehicles, motor vehicle benefits, and pedestrian benefits in mixed traffic flow environment, respectively. Optimal signal timing scheme should make the three indicators as optimal as possible at the same time, and this problem can be essentially attributed to the dynamic multi-objective optimization problem. Currently, most domestic solution methods are to solve the single-objective problem by weighting multiple targets, but it is easy to cause the partial optimality of some indicators, and the optimal signal timing scheme cannot be achieved for all the targets at the same time. In order to solve this problem, this paper first designs a dynamic multi-objective optimization model for intersection signal control. The control variables include the green signal-to-signal ratio and the period of the intersections. The objective function takes the average delay of the vehicles at the intersection, the traffic capacity of vehicles, and the average delay of non-motor vehicles (three indicators) into account. The objective function is described as following:

Constraint condition
The actual signal cycle must be satisfied with formula (18)
2. The signal cycle should be more than the sum of the green time of every phase
3. The maximum saturation of every motor vehicle flow should be less than 1
where 


where
Prediction model
When the algorithm detects the change of the environment, how to use the historical information of the population to predict the position of the optimal Pareto optimal solution in the new environment is the focus of the dynamic multi-objective evolutionary algorithm based on the prediction model. The working principle of partial least squares prediction model used in this paper is as follows:
When changes in the external environment is detected, the best population 
To predict a new solution

Forecast model.
For an individual 
After constructing a time series for each individual in the population and for individuals most similar to historical moments, this paper uses partial least squares regression to predict the individuals at the next moment.
Let the size of the population be 
Conducting partial least squares regression on
Optimization algorithm
For dynamic evolutionary algorithms, the algorithm needs to know if there is any change in the external environment in time in order to implement corresponding response measures. The similarity test is the tool used to determine whether the environment changes. There are two kinds of dynamic environment detection methods: one is to select several individuals randomly from the parent population, and if any one of them has a change in the objective function or constraint, it is considered that the external environment has changed. However, this method is very sensitive to the noise in the environment when it evaluates the function, and can be easily misjudged. Therefore, this paper selects another similarity detection operator based on population statistics
18

Dynamic multi-objective evolutionary algorithm based on partial least squares prediction model
This paper has improved the NSGA-II 12 algorithm, adding the above prediction model. The algorithm framework is as follows:
Step 1: Population size pop, evolutionary algebra gen = 1, environmental change parameters
Step 2: Let time = 0, current time
Step 3: The crossover and mutation operation of
Step 4: If
Step 5: If gen is the integer multiple of
Step 6: If
Step 7: We mutate some individuals of
Step 8: We use the partial least squares prediction mechanism to predict the best POS position
Figure 2 shows the flow chart of dynamic multi-objective optimization algorithm (DNSGA-II-PLS) based on prediction mechanism proposed in this paper.

Flowchart of DNSGA-II-PLS algorithm.
Experiments and results
Test function
In this section, two dynamic multi-objective optimization problems proposed by Farina et al.18, FDA3 and FDA1, are used to test the efficiency of the proposed algorithm. FDA1 belongs to the first-class question, and FDA3 belongs to the second-class question; and the DMOP2 19 of dynamic multi-objective optimization problem (DMOP) series put forward by the Goh and Tan belongs to the third-class problem. In addition, to study the algorithms processing capacity of discontinuous problems, this paper makes the discontinuous frontier dynamic multi-objective optimization problem 20 put forward by Deb dynamic, in order to get discontinuous frontier dynamic multi-objective optimization problems (DCP).
The dynamic multi-objective optimization problem varies with time (environment), time parameter 
Performance metrics
In this paper, we present two performance metrics, which are Inverted Generation Distance ( Coverage metric
PF represents the true Pareto front of uniform distribution. 2. Distribution metric

Diversity metrics 

Experimental comparison with other dynamic multi-objective algorithms
In order to verify the superiority of the proposed algorithm in this paper, three representative dynamic multi-objective optimization algorithms are selected for comparison. They are dynamic multi-objective evolutionary algorithm based on vector auto-regression prediction (DNSGA-II-AR), 21 presented by Aimin Zhou et al., dynamic multi-objective evolutionary algorithm DNSGA-II-PREM 22 based on simple prediction, and mutation-based DNSGA-II-MUT 23 of Deb et al. The contrast algorithm and the algorithm proposed in this paper are all based on the dynamic improvement of NSGA-II, but the difference is in the dynamic processing mechanism after the environment changes. Based on this, the comparison is more conducive to the analysis of the performance of the proposed partial least squares prediction mechanism.
Comparison of the distribution of Pareto solutions obtained by the algorithm
For these four algorithms, the parameters are set as follows: the population size pop is 100, the crossover probability
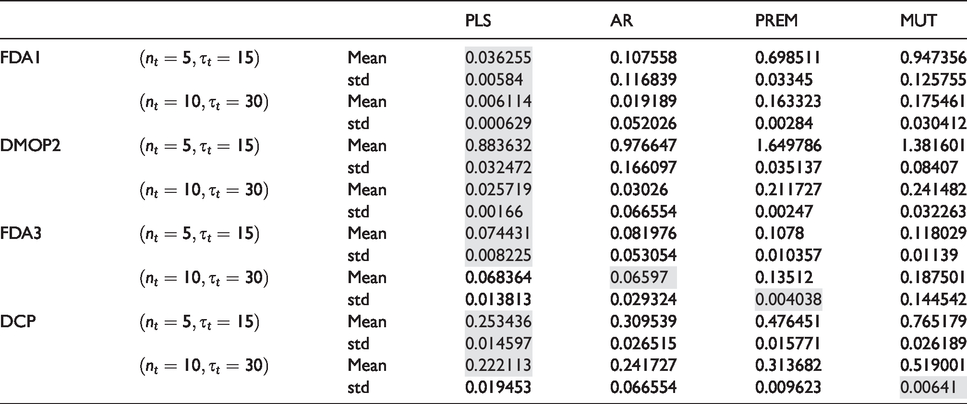
As can be seen from Table 2, DNSGA-II-PLS obtains a good convergence compared with other algorithms. Table 3 also shows that DNSGA-II-PLS has good tracking performance without loss of distribution. At the same time, DNSGA-II-PLS also has some advantages in terms of stability. It also has superior performance for different testing problems even when optimizing discrete and dynamic multi-objective problems. In Table 2 and Table 3, the grey shade values are the better results obtained from different methods. It can be seen from Table 2 and Table 3.
Metric of
Metric of

FDA1: The optimal frontier
DMOP2:
FDA3: FDA3’s
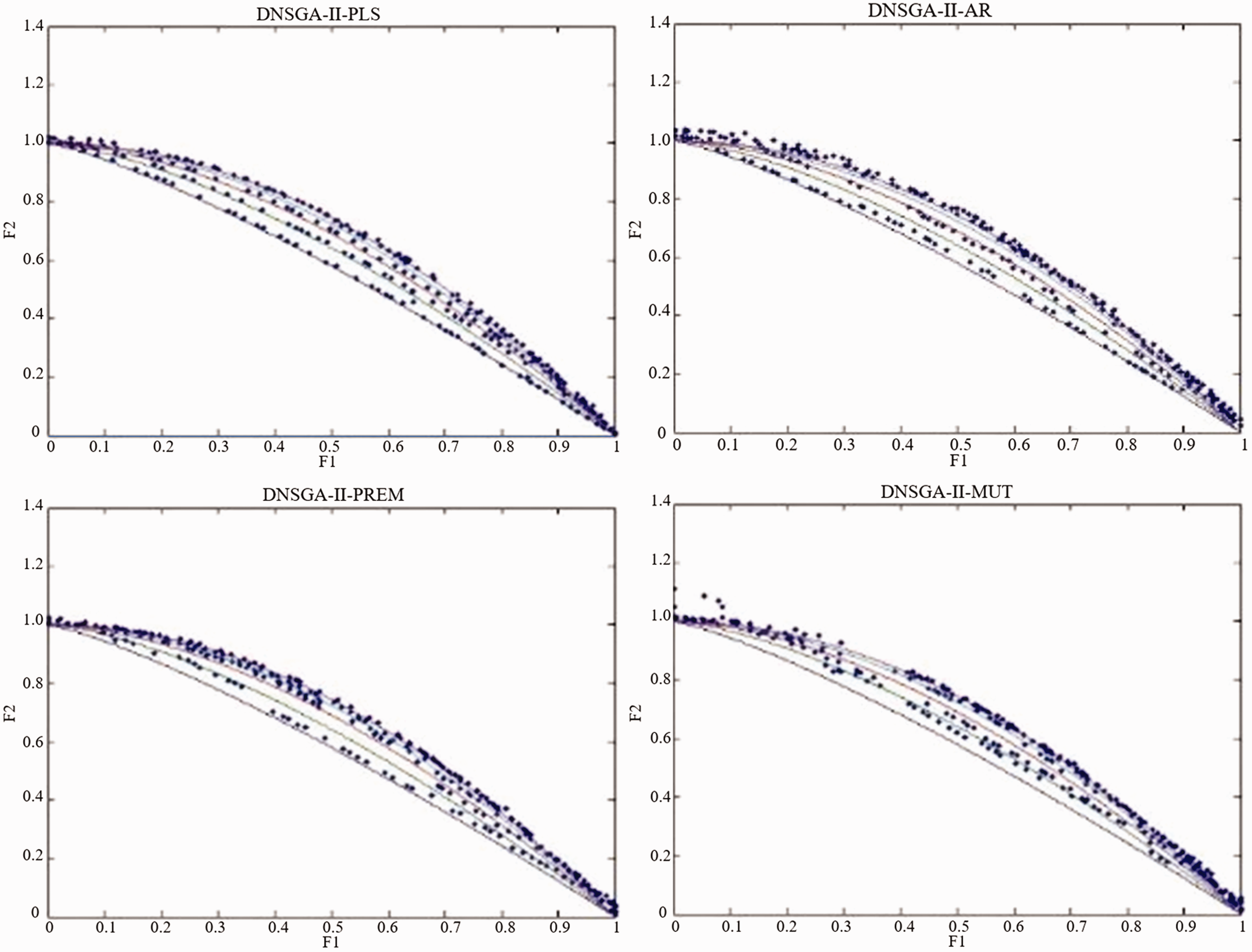
Four algorithms of Pareto solution set for DMOP2.

Four algorithms of Pareto solution set for FDA3.
DCP: The DCP’s

Four algorithms of Pareto solution set for DCP.
Based on the above analysis of the non-dominated results obtained from the four problems, we can clearly see that the quality of DNSGA-II-PLS solution is the best compared with the other three algorithms, and the uniformity is in no way inferior. Moreover, DNSGA-II-PLS converges rapidly in response to environmental changes under the conditions of more frequent and severe environmental changes.
Comparing the performance box diagram of the algorithm
Figures 6 and 7 are the

Average

Average
Analysis of algorithm complexity
The complexity of the algorithm is an important criterion for measuring the practicality of the algorithm. The parameters that determine the complexity in DNSGA-II-PLS are: The target number of problems 
The Figure 8 shows the time needed for four different algorithms running 500 generations on the same computer device. It can be seen that DNSGA-II-PLS (223.9 s) and DNSGA-II-AR (225.3 s) algorithms run faster than the other two algorithms, which is related to the complexity of the algorithm’s prediction mechanism. The fitting of the partial least squares regression model and the time series autoregressive model is a rather time-consuming process. However, when we contrast the

Average running time of four algorithms.
In a word, compared with the other three algorithms in terms of tracking performance, the DNSGA-PLS algorithm proposed in this paper performs better on the four types of testing problems described above. Meanwhile, it improves the convergence precision while has no loss of solution distribution. Although the amount of time spent increased slightly, the convergence accuracy improved greatly.
Case study and simulation
Basic information of single intersection
In order to test the intersection control method’s, which is based on partial least squares prediction of dynamic multi-objective evolutionary algorithm, signal control effect under the condition of mixed traffic flow, using the actual case of intersection in literature, 10 that is, taking Nanjing Taiping North Road–Zhujiang Road’s junction’s intersection points’ intersection as the research object, the basic situation of the intersection is shown in Figure 9. The north–south intersection is Taiping North Road, and the east–west direction is Zhujiang Road. There are two entrances and two straight-ahead lanes in all directions, with one motor vehicle left-turn lane and right-turn lane, respectively, and one non-motorized vehicle inlet and outlet, respectively.

Basic situation map of Taiping North Road–Zhujiang Road intersection in Nanjing.
The intersection is using five-phase signal timing control, the cycle duration is 136 s, and the yellow light phase of each phase is 3 s. The signal phase diagram is shown in Figure 10, regardless of the impact of the import gradient.

The signal phase diagram.
According to the data in the literature, the traffic flow at the intersections (pcu/h) and the pcu data at the peak hours (17: 00–18: 00) are shown in Table 4, and Table 5 shows green time ratio of the traffic flow at the intersections.
Traffic flow of intersection at peak time.

Green time ratio of the traffic flow at the intersections.

In order to realize the dynamic demand of road traffic, this paper uses the piecewise function to dynamically change the flow data at the intersection. The straight-ahead motor vehicle in the east is taken as an example to show the dynamic process. With half hour (0.5 h) as an optimization window, the traffic flow in each optimized window is p times of the peak traffic. If there are five optimization windows in this paper, this paper set the value of p as (0.85, 0.7, 1.15, 1.0.55), then the flow changes of straight-through vehicles in the east entrance are shown in Figure 11.

Dynamic changes of traffic flow.
Analysis of algorithm operation results
Based on the selected performance indicators described in section “Selection of performance indicators” and the parameter settings which used to establish a three-objective optimization model for a single-intersection considering hybrid traffic flow environment described in section “Basic information of single intersection”, the dynamic multi-objective evolutionary algorithm based on partial least squares prediction model proposed in this paper are used to solve the multi-objective optimization problem, and the TOPSIS decision method are used to determine the optimal signal timing scheme. By optimizing the green signal-to-noise ratio and period of the five phases at the intersections, the average delay of the intersections, the average delay of non-motor vehicles, and the waiting time of the pedestrians can be optimized simultaneously. The population size of DNSGA-II-PLS is 100, and the evolutionary algebra for each optimization window is 100. The other parameters used in the proposed algorithm has the same value as the other three algorithms described in section “Experiments and results”.
As can be seen from Table 6, time window 3 shows that the delay of motor vehicles and non-motor vehicles in the optimized control scheme are significantly higher than those of other time windows. This is clearly illustrated in Figure 11, whose Pareto front is located at the upper right of the other time windows square. This is due to the time window p = 1.15, when the intersection is in a state of oversaturation, and at this time the geometry of the intersection cannot meet the traffic demand normally, resulting in prolonged delays of motor vehicles and non-motor vehicles.
Control results of intersection signal optimization.

Analysis of the relationship between optimization objectives
Figures 12 to 14, respectively, show comparisons between the optimization targets at the different time windows. We can see that the optimal allocation of time-set evaluation metric changes with the time window changes, suggesting that the proposed strategy of dynamically optimizing the timing is feasible. That is to say that the method can provide different timing schemes for different time windows to meet the control requirements of different traffic flows, thereby improving the service level of the intersection. Figure 12 shows that vehicle delays and pedestrian crossing times conflict with each other, with vehicle delays reduce increasing the waiting time for pedestrian crossings. Similarly, Figure 13 shows that reducing vehicle delays increases non-motor vehicle delays. Figure 14 shows that delay of non-motor vehicles and the waiting time for pedestrian crossing are a pair of goals of the same increase and decrease with no conflict between the two targets.

Pareto frontier of motor vehicle delays and pedestrian crossing waiting time.

Pareto frontier of motor vehicle delays and non-motor vehicle delays.

Pareto frontier of non-motor vehicle delays and pedestrian crossing waiting time.
Decisions and contrast of timing scheme. It can be seen from the above analysis that the solution obtained by the multi-objective optimization algorithm is a set of non-inferior solutions. Therefore, when performing signal timing, the selection decision needs to be made from a number of feasible solutions. This paper uses interval TOPSIS decision-making method
24
for decision-making. The TOPSIS method is a common method for multi-objective decision-making. It is also called the ideal point method, which was first proposed by C. L. Hwang and K. Yoon in 1981, that the TOPSIS method’s satisfactory solution is closest to the ideal solution and far from the negative ideal solution. The comprehensive evaluation formula is as follows


The above are the candidate decision scheme
Table 6 shows the results, which are made from the use of proposed algorithm, to solve the three-objective signal optimization control model of single-intersection in single-intersection under mixed traffic environment and then through TOPSIS decision-making, includes each parameter setting scheme (
In order to measure DNSGA-II-PLS and other existing intelligent dynamic optimization algorithms’ signal optimal control performance on the same intersection, we use the DNSGA-II-PLS to solve the signal optimization control model, and through TOPSIS decision to get the average of 10 independent operation results. Then we contrast the classical algorithm used in the section “Experiments and results”, and set the parameters as follows: Each algorithm population size is 100, and other parameters are the same as theirs in section “Experiments and results”. The experimental results are shown in Table 7.
Control results comparison crossing signal optimization.

DNSGA-II-PLS: dynamic multi-objective optimization algorithm; DNSGA-II-AR: Autonomous regression dynamic multi-objective evolutionary algorithm; DNSGA-II-PREM: dynamic multi-objective evolutionary algorithm; DNSGA-II-MUT: mutation-based dynamic multi-objective evolutionary algorithm.
It can be seen from the calculation results in Table 7 that the DNSGA-II-PLS algorithm has better performance metrics of
Simulation of results
First, we set up an isolated intersection traffic network in the mixed traffic environment under the VISSIM platform. As shown in Figure 15, we complete the traffic input of each inlet road. The dynamic traffic flow given in Figure 11 are input into the VISSIM environment.

Simulation diagram of isolated intersection road network in VISSIM.
In order to express the simulation results clearly, we set the simulation duration to 2.5 h. When the traffic flow change value at the whole intersection is over 100 pcu/h, the traffic status is considered to be changed. At this time, the dynamic multi-objective optimization algorithm is used to optimize real-time optimal Time allocation program. In order to test the effectiveness of the proposed timing optimization based on dynamic multi-objective decision-making, we first compare the effectiveness of different algorithms. The parameters of each algorithm are set as follows: the population size is 100, the optimal algebra for each time window is 100, and other parameters are the same. Table 8 shows the comparison of the control effects of different algorithms. The evaluation metrics used are average vehicle delay, average motor vehicle stop delay, average non-motor vehicle delay, and average non-motor vehicle stop times of the entire simulation period. It can be seen from the table that the DNSGA-II-PLS method proposed in this paper is superior to other algorithms in all evaluation dimensions although the control effect between different algorithms do not differ much.In table 8, the grey shad values are the better results obtained from different methods. It can be seen from table 8.
Comparsion of the optimizaiton results for different algorithms.

DNSGA-II-PLS: dynamic multi-objective optimization algorithm; DNSGA-II-AR: autonomous regression dynamic multi-objective evolutionary algorithm; DNSGA-II-PREM: dynamic multi-objective evolutionary algorithm; DNSGA-II-MUT: mutation-based dynamic multi-objective evolutionary algorithm; TRRL: Transport and Road Research Laboratory.
In addition, Table 8 shows the comparison between the dynamic control method and the timing control method based on the DNSGA-II-PLS algorithm. The control method of the timing signal is the Transport and Road Research Laboratory (TRRL) method. 18 The TRRL method is used to set the intersections according to the initial state of the intersections Control parameters, and the value does not change with the traffic flow changes.
Figure 16 compares the average delay time and number of stops for motorized and non-motorized vehicles at two different timing methods. In Figure 16(a), the abscissa indicates a different timing method, the vertical axis represents the average vehicle delay time, and d units is seconds (s). Obviously under real-time control, vehicle delay time reduced greatly, reducing by 17% relative to the timing control delay. The reduction in non-motor vehicle delays by 50%, significantly reducing the time it took for vehicles to cross the intersection. In Figure 16(b), the abscissa indicates different timing methods and the ordinate indicates the average number of stops. We can see that the dynamic timing method proposed in this paper relative to the TRRL timing control method also significantly reduces the number of stops. Motor vehicle stops reduced by 20% and non-motorized parking reduced by 30%. In general, an isolated intersection dynamic timing method presented in this paper improves the service level of the intersection effectively.

Comparison of the average delay time and number of stops for motorized and non-motorized vehicles. (a) Delay comparison chart and (b) Parking comparison chart.
Conclusion
Aiming at the traffic jam problem caused by mixed traffic flow at single intersection, this paper establishes a dynamic multi-objective optimization model based on the delay of vehicles, the delay of non-motor vehicles, and the service level of urban roads, and proposes the dynamic multi-objective genetic algorithm DNSGA-II-PLS, which is based on partial least squares prediction model to solve the objective function. In this paper, through the comparison with three improved multi-objective evolutionary algorithms (dynamic multi-objective evolutionary algorithm, DNSGA-II-PREM, based on simple prediction; dynamic multi-objective evolutionary algorithm, DNSGA-II-AR, based on vector auto-regression prediction; and evolutionary algorithm, DNSGA-II-MUT), the DNSGA-II-PLS presented in this paper can show better convergence and distribution with less computation time. According to the final simulation, the proposed DNSGA-II-PLS algorithm can effectively improve the service level of urban roads at the intersection of dynamic traffic demand and reduce the delay of motor vehicles and non-motor vehicles. However, the test problems used in this paper are simpler, and the dynamic multi-objective in reality is far more complicated than this. Whether DNSGA-II-PLS can handle the real problems in other fields is still outstanding, which is the content of the next step. In addition, the prediction model adopted by DNSGA-II-PLS is more complicated, resulting in an increase of the overall time-consuming algorithm. How to simplify the partial least squares prediction mechanism and reduce the difficulty of model fitting under the condition of ensuring the prediction accuracy need to be further studied.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors would like to thank the Natural Science Foundation of China (61104166).