
Abstract
This study presents a novel optimization framework for condition-based maintenance using a discrete-time absorbing Markov chain to balance maintenance costs and system availability. The framework employs a multi-threshold policy, in which degradation thresholds dynamically determine non-periodic inspection intervals and maintenance actions. The degradation process follows a continuous-time Gamma process. Preventive maintenance is triggered when degradation exceeds a preventive threshold but remains below the failure limit, whereas corrective maintenance occurs at the failure limit. The optimization ensures cost efficiency while maintaining availability above a predefined target. Key performance metrics, including degradation-dependent inspection costs, maintenance cycle length, and quality loss, are analytically derived and evaluated. Importantly, the total cost per unit time explicitly integrates a degradation-dependent quality-loss component alongside inspection, maintenance, and downtime costs, highlighting quality loss as a key driver of decision-making trade-offs. The framework jointly optimizes the number of degradation phases, inspection intervals, and degradation limits to minimize the total cost per unit time subject to an availability constraint. The mixed-integer nonlinear programming problem is solved using a two-stage approach: a greedy search to select the number of degradation phases, followed by a constrained nonlinear program to refine the inspection intervals and thresholds. Numerical results demonstrate cost-efficient policies with high availability, providing practical insights for decision-makers. The work presents a robust decision-support tool for managing complex degrading systems.
Introduction
Effective maintenance management is essential for achieving operational reliability and availability across various industrial sectors. The increasing focus on maintenance planning and control is fueled by the continuous automation of production processes and the pressures of a highly competitive market. Maintenance-related costs account for 15%–70% of total production expenses in manufacturing, depending on industry type. Traditional maintenance strategies, such as reactive or time-based maintenance (TBM), rely on predetermined schedules based on age or usage. 1 However, these approaches often result in unnecessary interventions, underutilization of the remaining useful life, or unexpected failures, as they fail to fully leverage information about the asset’s degradation state. 2 Recent advancements in real-time monitoring technologies have shifted toward condition-based maintenance (CBM), which dynamically tailors maintenance decisions based on real-time degradation signals of assets, for example, temperature, vibration, or pressure.3,4 Unlike conventional maintenance strategies, CBM leverages operational data to optimize maintenance timing, balancing preventive measures with the risk of failure. This paradigm has significantly reduced maintenance costs and improved system availability and lifecycle efficiency, as evidenced by several studies.5–7 CBM has found increasing application in systems operating under dynamic environments with stochastic degradation processes, as highlighted by Sun et al. 8 and Shen et al. 9
Modeling degradation processes is a pivotal aspect of CBM policy development. Continuous-time degradation models, such as the Gamma process, have been widely employed due to their flexibility in capturing monotonic wear and degradation.10,11 However, integrating degradation modeling with optimization frameworks remains computationally intensive, particularly for systems that require multi-threshold maintenance strategies. Traditional approaches often fail to adequately account for the dynamic interplay among inspection intervals, maintenance thresholds, and system reliability. 12 The integration of periodic inspections into CBM policies plays a crucial role in ensuring effective maintenance decisions while balancing operational costs and system degradation. 13
This study introduces a novel CBM optimization policy that leverages a discrete-time absorbing Markov chain model to efficiently manage trade-offs between maintenance costs and system availability. Our framework incorporates a multi-threshold policy that dynamically adjusts inspection intervals and maintenance decisions based on the system’s degradation state. Non-periodic inspections are dynamically scheduled based on the system’s degradation state, providing timely insights into its trajectory. This degradation-dependent scheduling ensures that preventive and corrective maintenance actions are optimally deployed.
The proposed framework is formulated as a mixed-integernonlinear programming (MINLP) model and solved using a two-stage optimization approach. First, a greedy search determines the optimal number of degradation phases, followed by a constrained nonlinear programming algorithm that refines the inspection intervals and maintenance thresholds. Performance metrics, including maintenance cycle length, inspection costs, and degradation-dependent quality loss, are derived analytically, ensuring a comprehensive evaluation of the proposed policy under varying operational conditions.
Numerical experiments demonstrate the efficacy and robustness of the proposed approach in minimizing total maintenance costs while maintaining high system availability. Our method provides a robust decision-support tool for managing complex degrading systems by optimizing the interaction between inspection frequency and degradation thresholds. This work extends the state-of-the-art CBM optimization by addressing limitations in current approaches and highlighting the benefits of integrating multi-threshold policies within Markov-based modeling frameworks.
The remainder of this paper is organized as follows: The “Literature review” section examines the state-of-the-art in CBM and related optimization techniques. Next, the “Contributions” section outlines the targeted contributions of this study. This is followed by the “Notations and assumptions” section, which defines the notation and assumptions, and then introduces the problem formulation in the “Model analysis” section. Subsequently, the “Problem description” section presents the mathematical model, analysis, and optimization methodology. Numerical experiments and results are provided in the “Numerical results” section, along with practical guidelines to support implementation of the proposed methodology. Finally, the Conclusion Section summarizes key findings and identifies directions for future research.
Literature review
Condition-based maintenance (CBM) has emerged as an essential strategy in industrial maintenance, leveraging real-time data to optimize maintenance schedules and reduce costs. 14 Unlike traditional reactive or time-based maintenance strategies, CBM focuses on monitoring the actual condition of assets to predict failures and schedule maintenance activities at the most opportune moments, reducing downtime, maintenance costs, and operational disruptions. CBM involves complex processes, including data collection, analysis, and decision-making, that must be systematically addressed to ensure cost-effectiveness. Recent advances in Big Data analytics and IoT have enabled real-time decision-making based on abundant data from various sources. 15 The field of CBM encompasses four main research areas: theoretical foundations, implementation strategies, operational aspects related to inspection and replacement, and prognosis.16,17 CBM applications span various domains, incorporating data mining, artificial intelligence, and statistics to create maintenance-smart systems. While CBM offers significant advantages, its practical implementation requires careful consideration of technical and financial factors.18,19
Degradation modeling is a cornerstone of CBM, providing the tools to assess and predict asset condition over time. Degradation modeling is the process of anticipating how a system or product will behave over time as it ages or degrades. This understanding is critical in various applications, including product design, production, and maintenance. Accurate degradation models enable the estimation of remaining useful life (RUL), a critical factor in making timely and effective maintenance decisions. 20 Among the stochastic processes used for modeling degradation, the Wiener process, gamma process, and random coefficient models stand out for their applicability to different types of degradation phenomena. 21 The Wiener process is particularly effective for modeling fatigue crack growth, as it accounts for random effects and measurement errors.22,23 Its utility in modeling mission-oriented systems with imperfect preventive maintenance and Bayesian parameter estimation for remaining useful life (RUL) prediction is well demonstrated.24,25 Gamma processes are more suitable for monotone-increasing irreversible degradation patterns, such as material fatigue or corrosion, due to their ability to capture progressive, non-decreasing degradation, aligning with real-world maintenance scenarios. 26 They are commonly applied in modeling systems subject to periodic inspection policies 27 and recently extended to incorporate imperfect preventive actions and statistical inference.28,29 Gamma processes with random effects are especially valuable in CBM, as they can account for heterogeneous initial degradation levels and correlations between initial degradation and degradation rates. 21 Additionally, the optimal design of degradation tests using gamma processes ensures precise lifetime predictions by determining appropriate sample sizes, inspection frequencies, and measurement counts under budget constraints. 30 Random coefficient models further enhance CBM strategies by explicitly accounting for the inherent heterogeneity in many real-world systems. Unlike traditional models that often assume homogeneity in degradation behavior across components, random coefficient models capture variability in initial degradation levels, degradation rates, and responses to environmental factors. This adaptability is crucial for systems composed of multiple units operating under varying conditions, where a one-size-fits-all approach may lead to suboptimal maintenance decisions, as demonstrated in Zhou et al. 31 and Tang et al., 32 where dynamic monitoring intervals and control limits are incorporated to reflect variations in component-specific degradation rates.
A control limit policy is a key concept in condition-based maintenance (CBM), where maintenance decisions are based on the condition of the monitored equipment. This policy defines a threshold for replacement or maintenance actions to minimize the long-term average maintenance costs. 33 Dynamic control-limit policies, such as the inflow-dependent approach proposed by Qian and Wu 34 for hydroelectric generating units, adapt to time-varying conditions, underscoring the importance of accounting for external environmental factors. For multi-component systems, Nguyen et al. 35 proposed a predictive CBM approach that combines degradation information with importance measures to identify the most critical components. Their framework integrates predictive models of future degradation states with system-level importance indices, allowing maintenance actions to be prioritized based on both the likelihood of failure and the impact on overall system performance. Zhu et al. 36 introduced joint maintenance intervals to reduce high setup costs, demonstrating significant cost savings compared to failure- or age-based policies. Liu et al. 37 explored age- and state-dependent operating expenses, showing that optimal maintenance thresholds decrease with system age, thereby integrating economic and environmental considerations. Golmakani and Fattahipour 38 further emphasized the simultaneous optimization of control limits and inspection intervals to balance preventive and failure replacement costs effectively. Building on this, Golmakani and Pouresmaeeli 39 developed a framework to optimize replacement thresholds and inspection intervals for systems with non-decreasing failure-replacement costs and costly inspections. Their approach addresses practical scenarios where failure costs depend on the system’s degradation state or the time of failure, thereby demonstrating the value of detailed cost modeling in CBM. Advanced sensor and information technology, as stated by Zhu et al., 36 facilitates the implementation of CBM by enabling remote data collection. Innovative mathematical frameworks, such as the Markov decision process-based approach by Havinga and de Jonge 40 and the Piecewise-Deterministic Markov Process (PDMP)-based model by Wang and Chen, 41 highlight the potential of detailed condition monitoring in refining control-limit policies. However, the effectiveness of control-limit policies depends critically on the granularity of condition information, a point also highlighted in optimal replacement models for partially observable systems with dependent failure modes, 42 as well as on the stability of degradation processes and the relative costs of corrective maintenance. 43
Building on single-control-limit policies, multi-threshold control policies extend the condition-based maintenance (CBM) concept by incorporating multiple degradation limits to refine maintenance decisions. These policies benefit systems in which degradation progresses through multiple, identifiable phases. 44 On the other hand, they developed a hybrid policy combining corrective, periodic, and condition-based maintenance. They implemented two thresholds: an opportunistic threshold to align maintenance with other planned interventions and an intervention threshold to prevent imminent failures. This policy minimized expected maintenance costs and downtime, showcasing the benefits of integrating multiple maintenance strategies. Zheng et al. 45 proposed a dynamic threshold policy using the proportional hazards model, incorporating both age and covariate information from condition monitoring. Their approach outperforms other CBM policies in minimizing long-run average costs. Peng et al. 46 examined CBM for systems with non-homogeneous degradation processes, considering both constant and non-periodic inspection intervals. They show that optimal preventive replacement thresholds decrease monotonically with system age. Al Hanbali et al. 11 proposed a two-threshold control limit policy for a corrosion-prone pressure vessel in the process industry. Their approach introduced preventive maintenance and switching limits, demonstrating annual cost savings of up to 12.3% compared to single-threshold policies. Recently, Wang et al. 47 introduced a prognosis-driven, multi-threshold inspection and replacement model for high-speed railway bearings, incorporating safety coefficients, and residual lifetime metrics to enhance the robustness of the decision-making process.
Integrated condition-based maintenance (CBM) modeling has significantly addressed system degradation, incorporated diverse optimization strategies, and refined maintenance policies to enhance cost efficiency. These advancements have led to the development of multi-faceted frameworks that integrate dynamic inspection intervals, state-dependent control limits, and non-homogeneous degradation models. Castanier et al. 48 investigated a maintenance policy for repairable systems, focusing on state-dependent costs and time under non-periodic inspections using semi-regenerative renewal theory. Their approach highlighted the potential for cost-effective CBM strategies through dynamic control limits but remained constrained to single-objective optimization. Xiang et al. 49 addressed the optimization of burn-in and CBM policies for heterogeneous populations, integrating imperfect maintenance and bi-objective frameworks to balance system reliability and cost. Poppe et al. 44 proposed a hybrid CBM policy integrating two thresholds: an opportunistic threshold, used to align maintenance with other planned interventions, and an “intervention” threshold, which prevents imminent failures. Their approach demonstrated the benefits of combining corrective, periodic, and condition-based maintenance strategies, achieving cost savings and reduced downtime through optimized intervention scheduling. Hao et al. 50 studied a CBM strategy under imperfect inspections for continuous degradation. They demonstrate that relying on imperfect readings can outperform perfect inspections in specific settings, and they propose a two-stage policy that combines low-cost imperfect checks with perfect checks near decision points to minimize the long-run cost rate. The study also explicitly highlights the roles of false positives and false negatives in the formulation of renewal costs. Zhang et al. 51 presented a hierarchical maintenance framework that integrates partial and full inspections, leveraging degradation-state information to optimize maintenance costs and system reliability. Warranty-driven settings have further motivated joint optimization of inspection and condition-based maintenance for deteriorating products under extended warranty agreements. Zheng et al. 52 developed a joint inspection–CBM policy in which deterioration follows a non-stationary gamma process and, at each inspection, the decision maker selects whether to repair and schedules the next inspection. Their objective is to minimize warranty servicing cost, solved via stochastic dynamic programming, with an optimal control-limit structure and an efficient backward-induction procedure. In a related warranty context, Darghouth 53 proposed an integrated two-dimensional warranty framework for second-hand equipment that explicitly accounts for past life through prior age and usage. The framework combines a reliability threshold-driven CBM policy with decisions on preventive maintenance efficiency and upgrade intensity to minimize the dealer’s expected warranty servicing cost. Wang et al. 54 proposed a condition-based framework that integrates inspection interval adjustments and component reallocation criteria, explicitly addressing the unbalanced degradation rates of two-component interchangeable series systems, such as railway rails on small radius curves.
Beyond single-process degradation, Cao et al. 55 modeled multi-state deterioration together with random shocks and the dependence between soft and hard failures. They coupled a semi-Markov framework for discrete deterioration with a compound Poisson shock process, designed a condition-based inspection policy that reduces inspection intervals in degraded states, and optimized a bi-objective problem balancing availability and cost using Monte Carlo search. Their results show that co-modeling deterioration and shocks avoids overestimating policy performance and yields more realistic availability–cost trade-offs than treating the processes separately. In the same spirit, Zheng et al. 56 proposed a multilevel preventive replacement policy for mission-oriented systems subject to internal deterioration and external shocks, where missions occur as a sequence of random types and the degradation state is observed at mission completion through condition monitoring. The policy relies on mission-type-dependent replacement thresholds, optimized to minimize the long-run expected average cost while accounting for corrective replacement costs and mission-failure penalties. Yao et al. 57 explored the maintenance modeling of systems governed by a non-homogeneous gamma degradation process. They considered non-periodic inspections and demonstrated the superiority of this approach in minimizing long-term costs compared to traditional periodic inspection models. Khatab et al. 13 developed a condition-based selective maintenance model for multi-component systems operating over successive missions with scheduled breaks. Components degrade stochastically and may undergo imperfect maintenance or replacement during breaks, subject to time and reliability constraints. Their framework incorporates inspection-based failure detection, downtime penalties, and cost-effectiveness trade-offs, and determines the optimal subset of maintenance actions to minimize total expected mission cost. In a related work, Zheng 58 studied condition-based replacement for mission-oriented systems facing random mission types evolving as a Markov chain, where condition monitoring is performed at mission switches to support replacement decisions. They formulated the problem as a Markov decision process, considered cases in which the next mission type is known or unknown, and showed that the optimal decisions have a control-limit structure, leading to practical multilevel threshold policies. Recently, Hu and Sun 59 proposed a dynamic inspection and replacement policy for systems subject to continuous degradation and periodic shocks. Degradation is modeled as a drifted Wiener process, and shock increments are modeled as gamma-distributed. The joint inspection timing and replacement decisions are optimized via a Markov decision process without prespecifying the inspection structure. The framework is extended to multi-component systems with dependent degradation using multivariate Wiener and gamma shock models, and scalability is addressed through approximate dynamic programming supported by Monte Carlo simulation.
Despite these advances, the vast majority of CBM studies adopt single- or two-threshold policies and optimize either cost or reliability in isolation, with little attention to degradation-dependent inspection spacing or quality-loss effects.48,60 Moreover, the few works that tackle non-periodic inspections typically rely on heavy numerical integration or value-iteration schemes,61,62 which hinder analytical insight and rapid what-if analysis. These unresolved issues motivate the multi-threshold, degradation-aware framework developed in the remainder of this paper.
A comparison of related works is provided in Table 2. This table highlights the methodologies, decision variables, and objectives addressed in previous studies and outlines the key differences and contributions of our framework.
Targeted contributions
This work advances CBM research on degrading systems in four complementary directions:
(i) Multi-threshold framework with degradation-dependent inspections: Unlike classical single- or two-limit CBM policies, the proposed framework allows both the inspection spacing and the intervention limits to evolve with the current degradation state, capturing the acceleration of failure risk near the end of life.
(ii) Recursive-form performance algebra via an absorbing Markov chain (AMC): By mapping the gamma-driven degradation path onto an upper-triangular block AMC, we obtain explicit formulas for expected cycle length, cost components, downtime, and steady-state availability, eliminating the nested integrals or value-iteration schemes still required by recent CBM models (e.g., Zhao et al. 60 and Yang et al. 61 ).
(iii) Integrated cost-availability optimization posed as a tractable MINLP: The explicit derived formulas are embedded in a mixed-integer nonlinear program (MINLP) that minimizes unit-time cost while meeting a user-defined availability requirement. A two-stage greedy–COBYLA algorithm exploits the problem structure: the outer search fixes the number of phases, and the inner step jointly tunes inspection intervals and degradation limits to near-global optimality within industrial runtimes.
(iv) Incorporation of quality-loss economics and wear-dependent inspection effort: A Taguchi-style quality-loss curve and inspection times that grow with wear are integrated analytically. Such cost drivers are typically absent from conventional CBM studies (e.g., de Jonge and Scarf 5 and Poppe et al. 44 ). Our case study demonstrates that they can shift the optimum and reduce total cost by up to 9%.
Assumptions and notations
Below are the main assumptions of the considered framework:
− The degradation level of the system over time is monitored non-periodically at discrete times
− The inspections are perfect and reveal the current system’s degradation, for example, Castanier et al. 48 and Liao et al. 65
− The degradation process of the system follows a continuous-time Gamma process.
− Preventive and corrective maintenance actions return the system to an as-good-as-new state, for example, Zhou et al. 66 and Elwany et al. 67
− No degradation occurs for the system if it is under inspection, preventive, or corrective maintenance.
− When the system’s degradation exceeds a defined limit, the inspections are scheduled more frequently to reduce the chance of failure occurrence, see, for example, Dieulle et al. 68 and Barker and Newby. 69
− When the system’s degradation is found at an inspection to be above a preventive limit, a preventive maintenance action is undertaken.
− The inspection time is a function of the system’s degradation.
− The quality loss cost is a function of the system’s degradation. Typically, it increases as the system degrades.
− The probability distribution of degradation increments remains consistent across inspection intervals and is solely influenced by the phase-dependent inspection time and degradation limits.
− The degradation increments over successive intervals are independent, and the process has independent and stationary increments, consistent with the Gamma process properties.
− The durations of inspection, preventive maintenance, and corrective maintenance are deterministic and known.
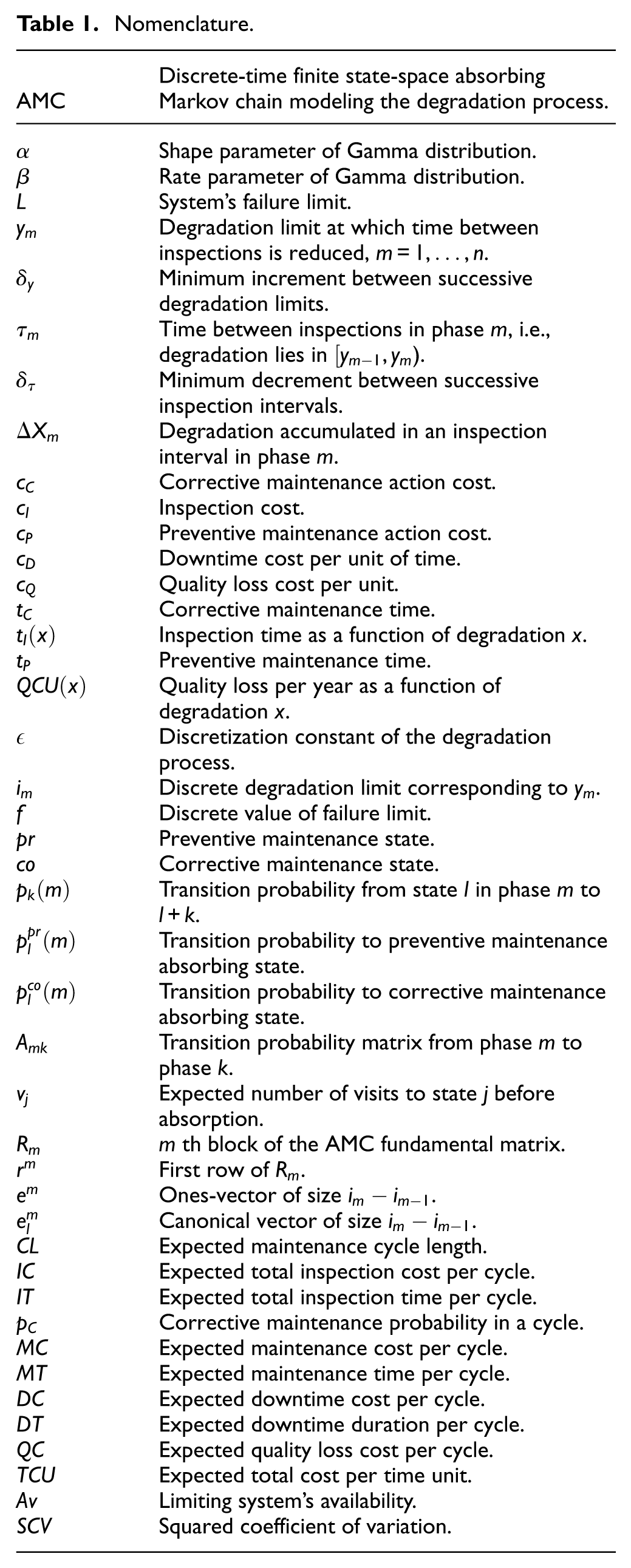
The notations outlined below are utilized throughout this paper (Table 1):
Nomenclature.
Comparison of relevant CBM optimization approaches in the literature.
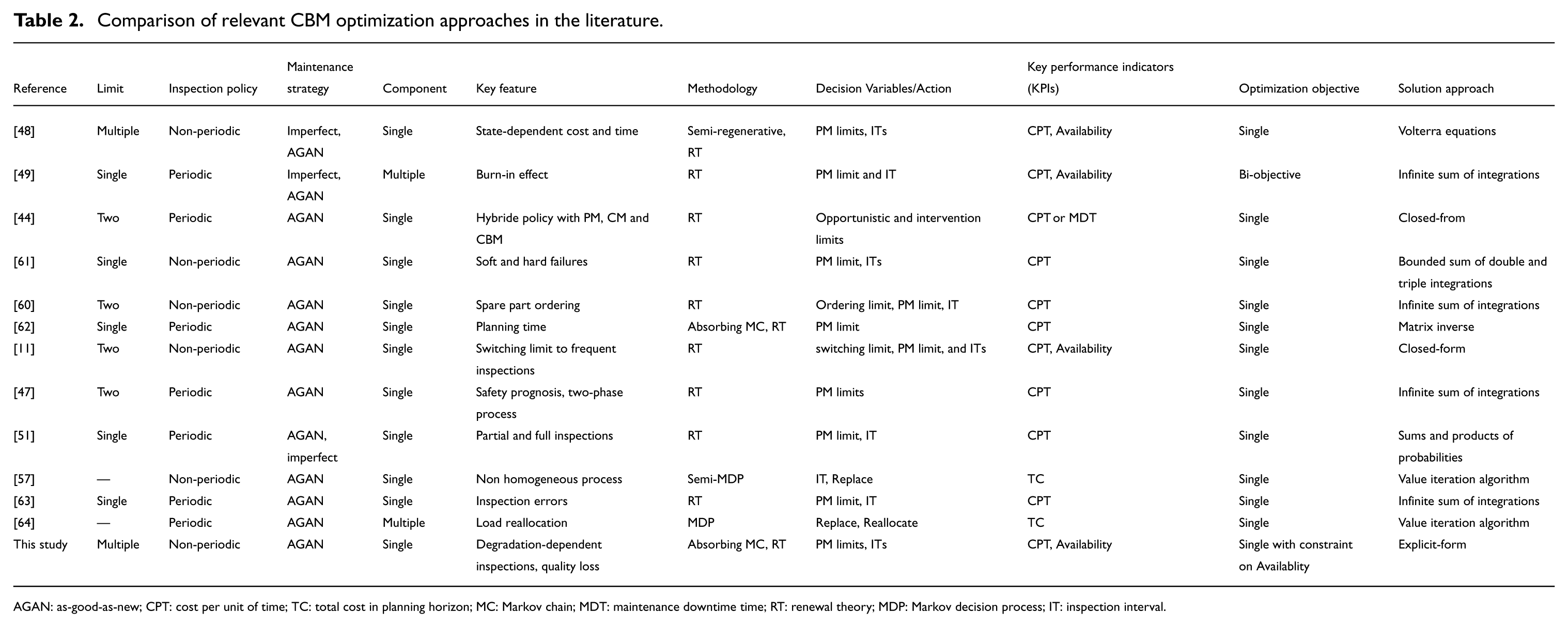
AGAN: as-good-as-new; CPT: cost per unit of time; TC: total cost in planning horizon; MC: Markov chain; MDT: maintenance downtime time; RT: renewal theory; MDP: Markov decision process; IT: inspection interval.
Problem description
The Gamma process is widely used in CBM, as it is suitable for modeling monotone degradation, such as crack growth, fatigue, and creep. 70 The system suffers from continuous degradation that accumulates over time. The accumulated degradation per unit of time follows the Gamma distribution with a probability density function expressed as follows:

where
The inspection reveals the system’s degradation state. Inspections are conducted at varying intervals depending on the current degradation level. We define
According to the problem at hand, the decision variables are the number of phases
The random variable
The beginning of an inspection interval

where
The system’s maintenance policy is as follows: if an inspection occurs at time
The preventive maintenance cost is denoted by
The preventive maintenance requires an inspection, and its cost inherently includes the inspection cost, that is,

where
Model analysis
The continuous, non-decreasing degradation process is discretized by introducing
When degradation is in phase
In the subsequent analysis, the values of
Based on the system’s state
If
If
If
To simplify the state space of the Markov chain, all preventive maintenance states, that is, states
The focus is on the degradation process within a maintenance cycle that begins in an as-good-as-new state, that is,
Figure 1 illustrates the transition diagram of the discrete-time finite state-space absorbing Markov chain, referred to as (

where

and
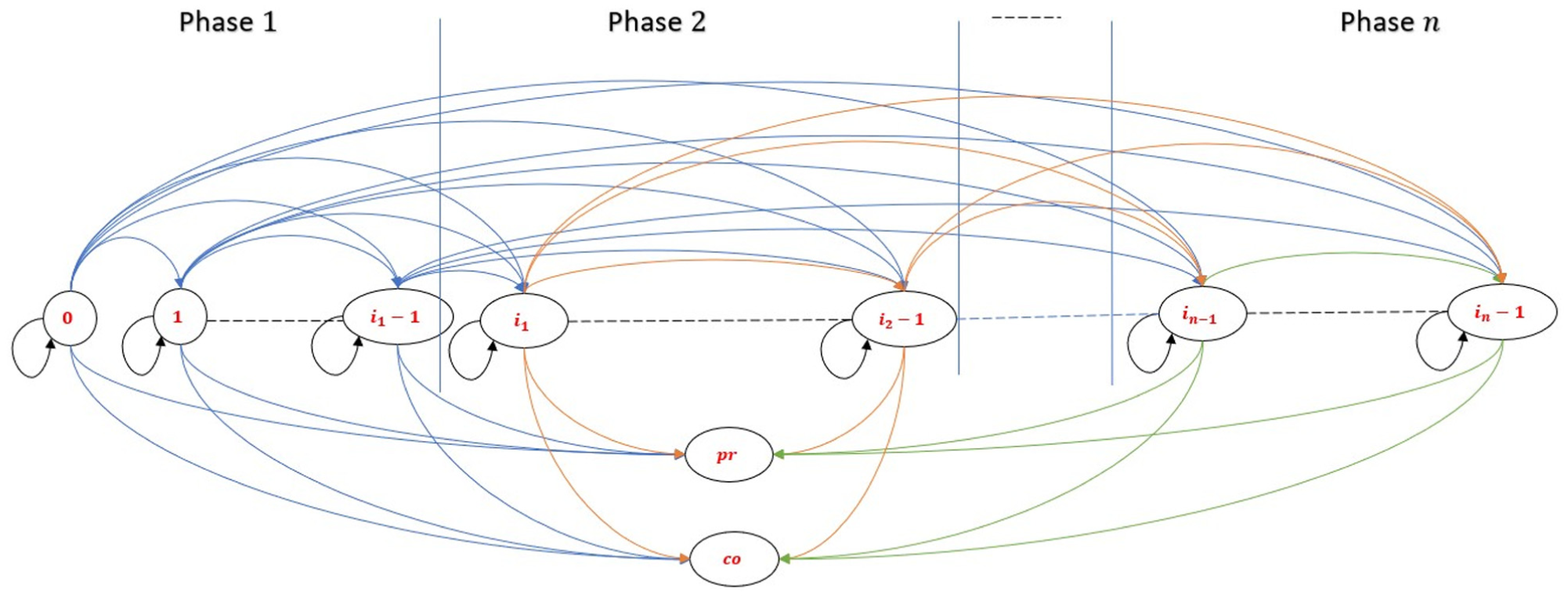
Transition diagram of the discrete-time finite state-space Markov chain (
AMC transition and fundamental matrices
In this section, we analyze the transition probability matrix of the absorbing Markov chain modeling the system’s degradation over time. Let

where,
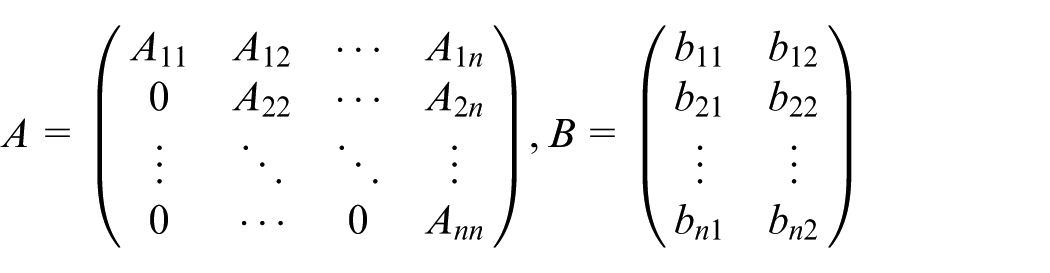
The fundamental matrix of
In our case,
In the following, we derive a recursive-form expression for the first row of the fundamental matrix,

where,

where


Performance metrics
In this section, we derive the various cost and time factors during a maintenance cycle, as well as the expected total cost per unit of time and the limiting system’s availability. A maintenance cycle is defined as the time period during which the
- Expected inspection cost and time per cycle: Let

where

where,
- Expected maintenance cost and time per cycle:
Equations (3) and (4) are used to derive the first equality. Here,


- Expected downtime and cost per cycle: A cycle finishes with downtime if the


Here,
- Expected quality loss per cycle:
where,
- Expected maintenance cycle length: The maintenance cycle is the sum of the

where,
- Expected total cost per unit of time: According to the Renewal Reward Theorem, the long-term expected maintenance cost per unit of time is the total expected cost per cycle divided by the expected cycle length, expressed as:
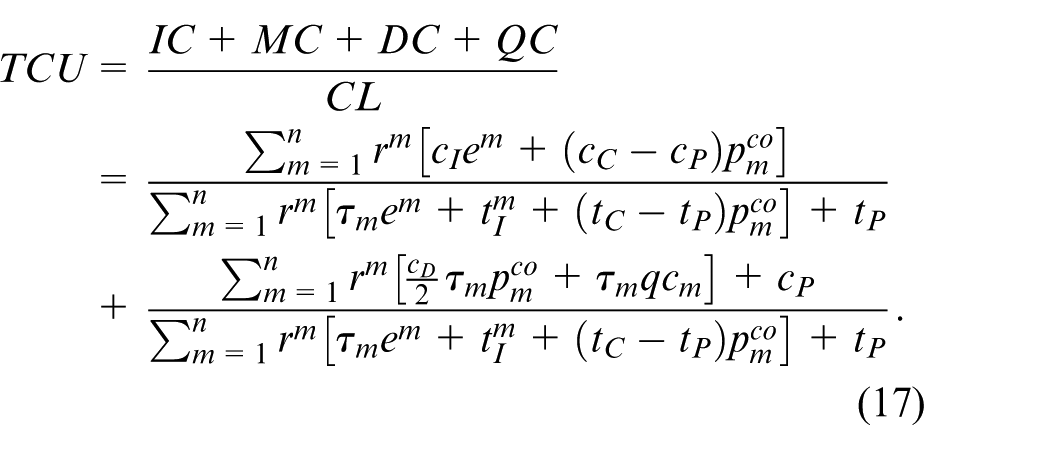
where, the last equality follows from
- Limiting system’s availability: The system is unavailable if it is under inspection, maintenance, or down. Therefore, the limiting system’s availability (
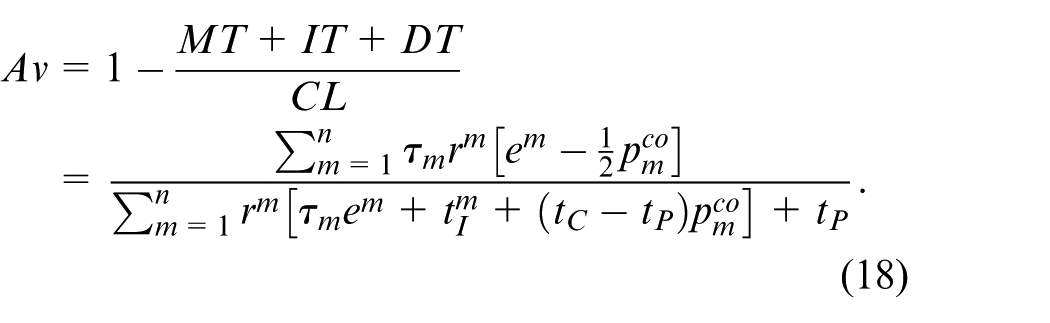
The expected total cost per unit of time and the system’s availability are nonlinear functions of the inspection intervals and the degradation limits.
Performance optimization
Our objective is to minimize the expected cost per unit of time,
The input parameters
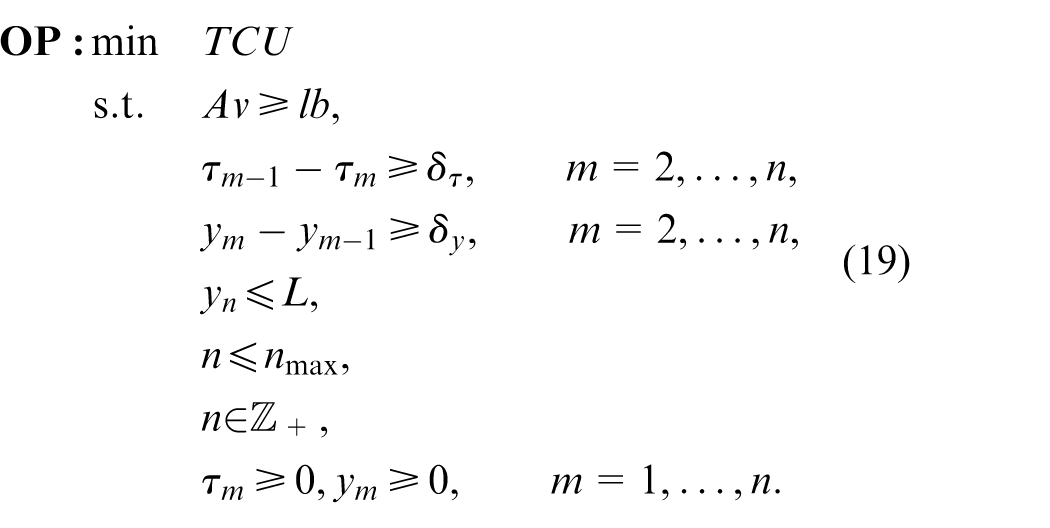
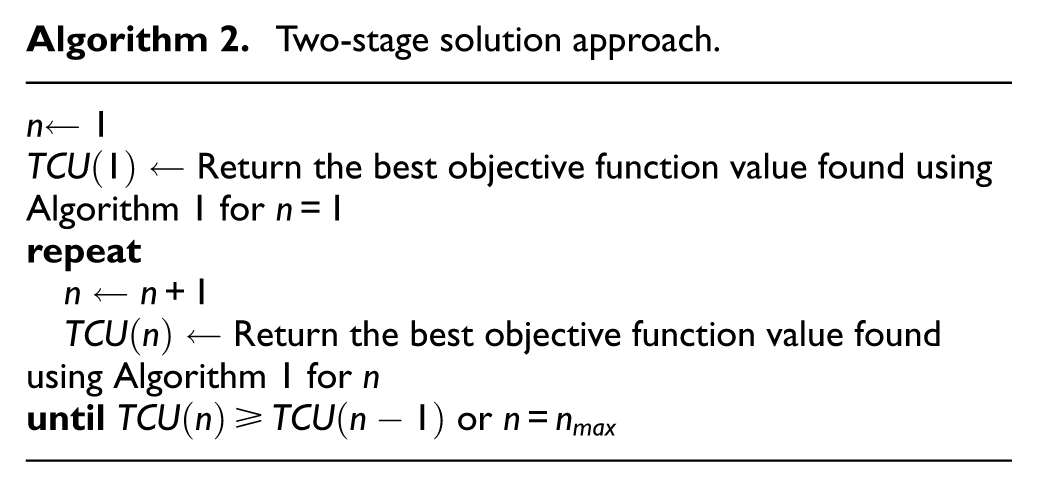
The optimization problem under consideration is a mixed-integer nonlinear programming (MINLP) problem. The proposed solution methodology follows a two-stage approach. In the first stage, a greedy search is performed over the number of phases
To solve the NLP problem, we tested several iterative algorithms, including constrained optimization by linear approximation (COBYLA), sequential least squares programming (SLSQP), and the trust region-constrained algorithm (trust-constr). Among these, the COBYLA algorithm demonstrated the best performance in terms of both objective function value and computational speed for a fixed maximum number of iterations. The COBYLA algorithm was implemented using a multi-start approach, as described in Algorithm 1.
Exploration-exploitation algorithm for the second stage NLP problem with multi-start.
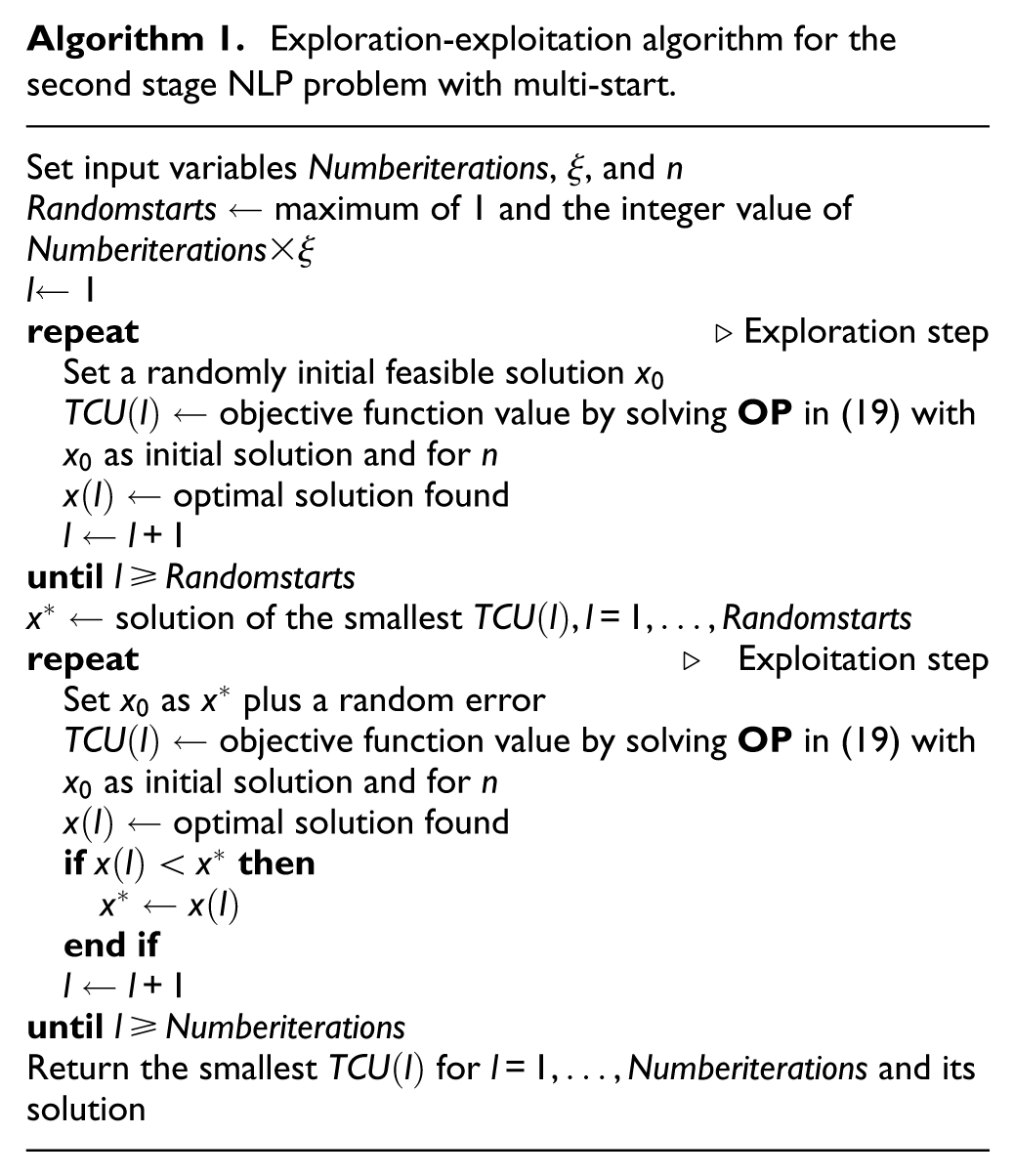
Algorithm 1 employs a two-phase strategy to enhance solution quality. In the exploration phase, the solution space is sampled by running the COBYLA algorithm with multiple randomly generated initial solutions. In the exploitation phase, the best solution from the exploration phase is perturbed randomly to generate new initial points, and the COBYLA algorithm is executed multiple times with these perturbed solutions. The total number of initial solutions is partitioned between the exploration and exploitation phases according to a predefined proportion
Two-stage solution approach.
Numerical results
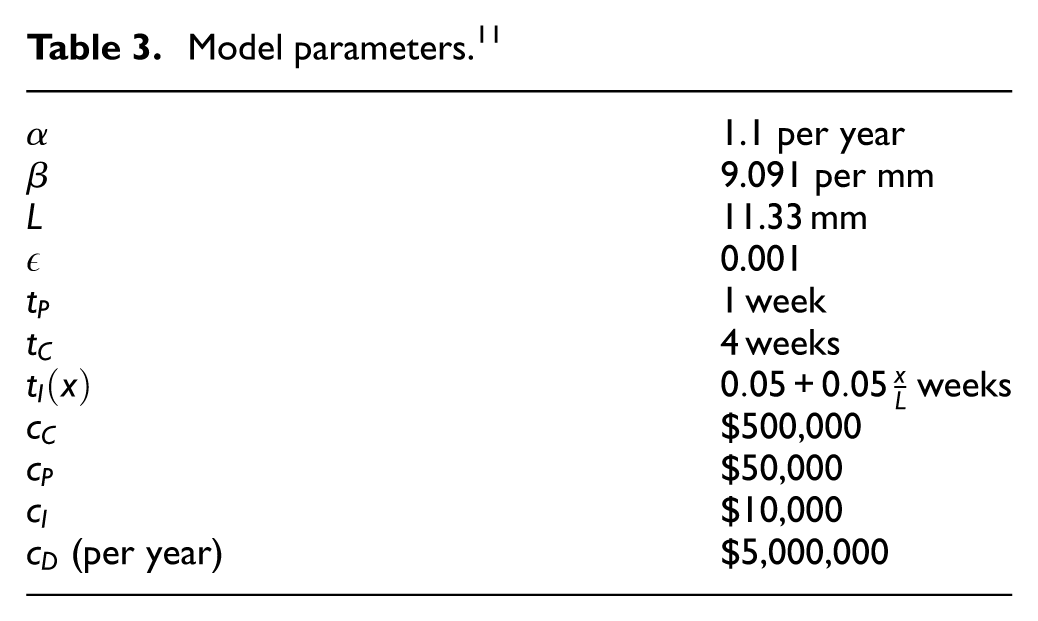
In this section, we demonstrate the applicability and effectiveness of the proposed multi-threshold CBM policy by applying it to the numerical case introduced by Al Hanbali et al.
11
(see Table 3). The Gamma process parameters can be estimated using the method of moments and the maximum likelihood method; see, for details, van Noortwijk.
70
As a key difference from the original setup, we consider a multi-threshold policy in which the inspection time depends on the current degradation level, and the quality-loss cost is non-negligible. Specifically, in the base case, we model the inspection time as a linear function of degradation, given by
Model parameters. 11
Quality loss parameters. 72
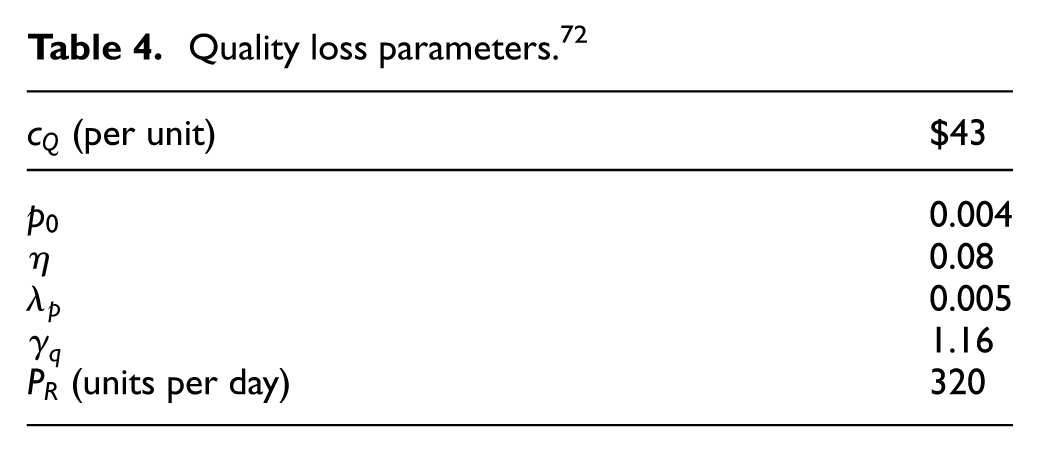
The downtime cost per year,
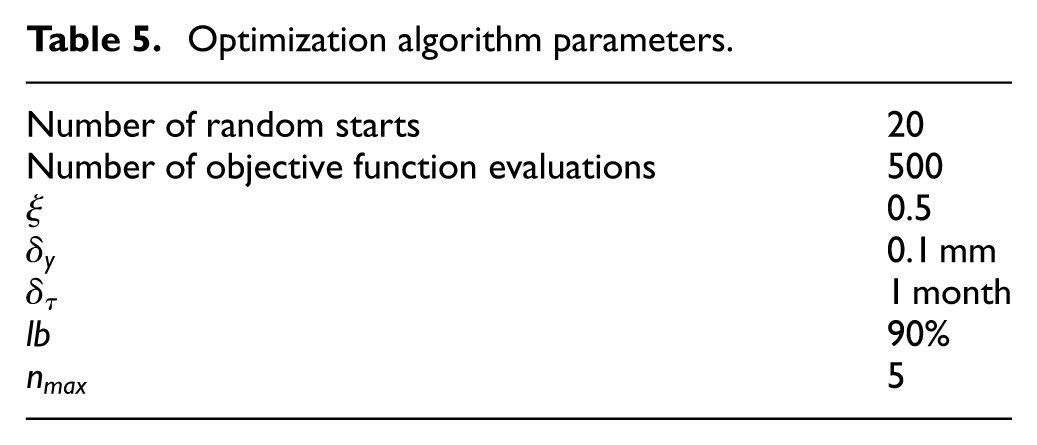
Optimization algorithm parameters.
Benchmarking of the multi-threshold CBM policy
In this section, we benchmark the optimal multi-threshold CBM policy, where degradation levels and the time between inspections are decision variables, against three baseline scenarios. The first scenario is the two-threshold maintenance policy. The second (resp. the third) scenario is the optimal multi-threshold policy, in which the degradation levels (resp. the time between inspections) are the only decision variables in the two-phase solution approach.
In addition to the total cost per unit of time (
Comparison of the optimal multi-threshold versus three baseline scenarios.
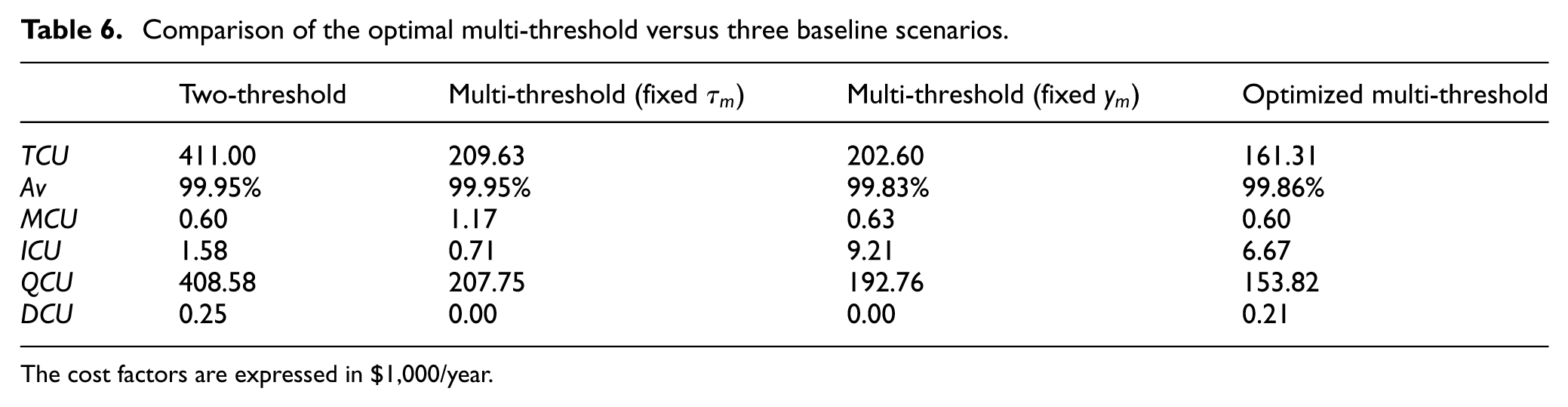
The cost factors are expressed in $1,000/year.
Impact of quality loss parameters on system performance
Figure 2 illustrates the impact of varying the parameters of the quality loss model (
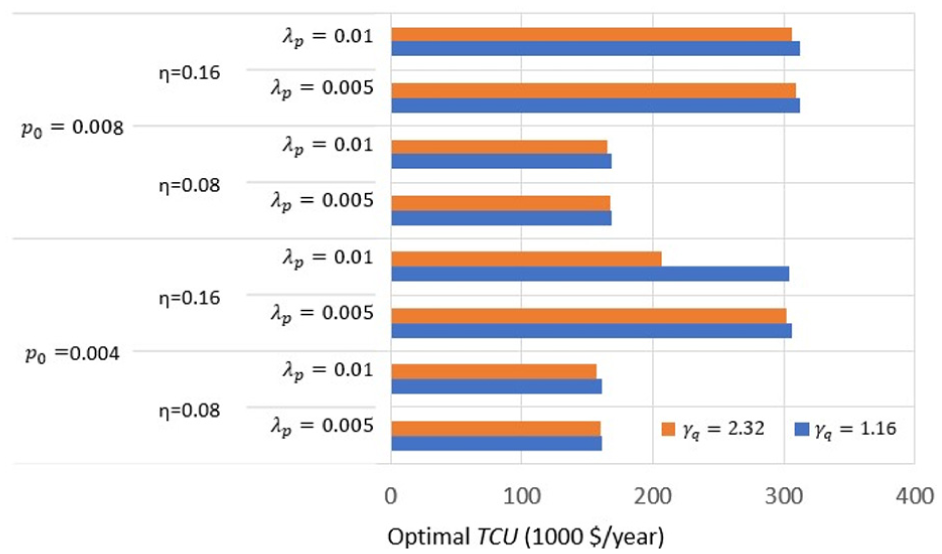
Optimal cost per unit of time
The findings show that the parameters
Sensitivity analysis of Gamma process parameters and their impact on maintenance costs
Table 7 presents the sensitivity of the optimal total cost per year (
Optimal
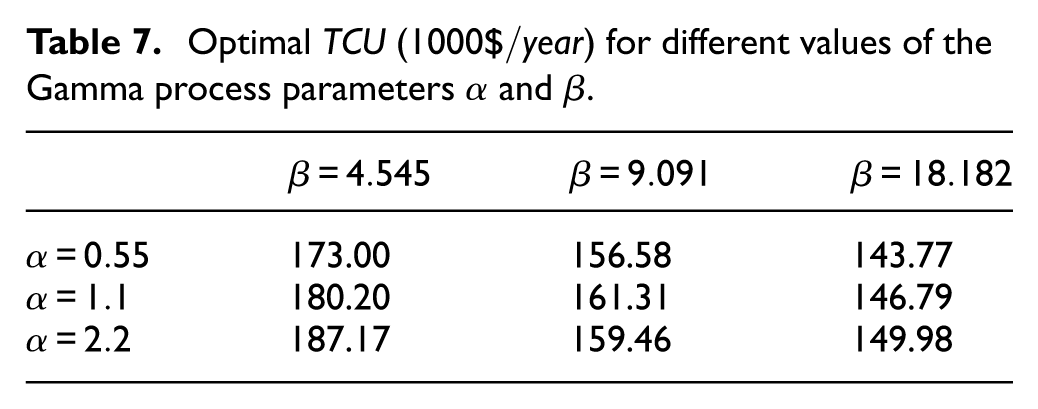
The results indicate that the optimal
Effect of cost factors on maintenance strategy optimization
Figure 3 illustrates the sensitivity of the optimal
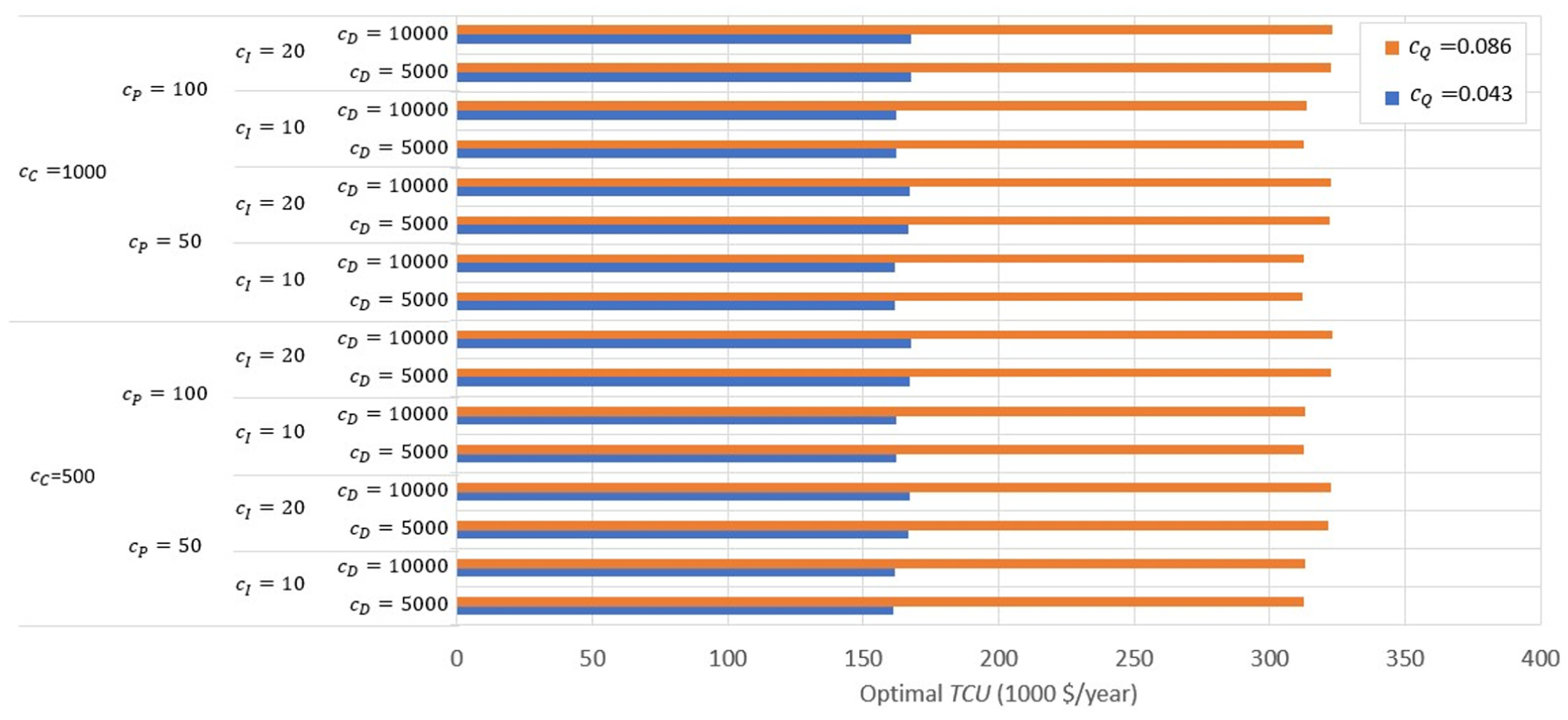
Optimal cost per unit of time
By contrast, the optimal
Additionally, we examined the effects of varying time factors
Practical implications
The numerical results yield the following practical implications for the implementation and adoption of the proposed multi-threshold CBM policy in industrial settings:
Switching from the standard two-threshold policy to the optimized multi-threshold policy reduces the total annualized cost from $411,000 to $161,310 (a 60.8% decrease), while maintaining virtually unchanged availability (99.95% → 99.86%). This highlights that the optimization effort is financially worthwhile even under strict uptime requirements.
In the benchmark case, quality loss represents approximately 95% of the total cost ($153,820 out of $161,310). The policy, therefore, trades a modest increase in inspection expenditure (+$5090/year) for a 62% reduction in quality loss. Sensitivity analysis confirms that doubling the quality-loss penalty almost doubles the total cost, whereas doubling corrective, preventive, or downtime costs increases the total cost by less than 4%. This suggests that investing in high-resolution inspection and monitoring technologies is particularly advantageous when poor-quality outputs are costly, such as in aerospace, pharmaceutical, or precision manufacturing sectors.
Quadrupling the mean degradation rate leads to only a 25% increase in total cost, while halving the degradation variance reduces the total cost by about 14%. This indicates that the optimized policy remains robust and effective even when the degradation model is not perfectly calibrated, providing a practical advantage in real-world environments where degradation behavior is uncertain.
The model schedules shorter inspection intervals (e.g., 0.6 months) only during the final degradation phase, while maintaining longer intervals during the early life stages. This dynamic adjustment reduces latent downtime: the expected downtime cost per year is approximately $210 under the optimized policy compared to $250 under the two-threshold policy. In practice, this means that rapid inspection should be prioritized only when the system approaches the end-of-life degradation window, and unnecessary inspections should be avoided during early operational phases.
Nevertheless, under the standard assumptions of perfect inspections and as-good-as-new maintenance, the results suggest that, from a practical standpoint, concentrating inspection effort as the asset approaches critical degradation and explicitly accounting for quality-loss penalties can provide substantial economic benefits. In real deployments, inspection outcomes may be noisy, and maintenance actions may lead to partial restoration, which can affect the optimal inspection sequence and the effective threshold values.
Conclusion
In this paper, we propose a multi-threshold condition-based maintenance (CBM) policy for continuously degrading systems modeled as the Gamma process. Our model is characterized by key features that determine the inspection time and the quality-loss cost functions associated with system degradation. The expected maintenance cost per unit of time and the system’s availability are derived explicitly by leveraging a matrix-analytic approach to the absorbing Markov chain and modeling the system as a multi-state system. We propose a two-stage approach to solve the MINLP problem. The first stage involves a greedy search over the number of degradation limits, and the second stage reduces the problem to a constrained nonlinear programming (NLP) problem, which is solved using the COBYLA algorithm with multi-start. A case study retrieved from the literature was analyzed to demonstrate the applicability and effectiveness of the proposed approach, showcasing the superiority of the multi-threshold CBM policy in a comparative analysis. A comprehensive cost, time, and variability sensitivity analysis underscores the importance of accurate estimation of the quality loss cost per unit and of key variables, such as the mean and variance of degradation growth per time unit, in determining the optimal maintenance policy. This analysis serves as a crucial tool for decision-makers and maintenance engineers to better understand the impact of these factors on the overall maintenance strategy.
For future extensions, the model could be extended to consider other degradation processes beyond the Gamma process used in this work. For example, the Wiener process is another common degradation model in which degradation can increase or decrease over time. This would result in a Toeplitz block structure for the transient probability matrix, rather than the upper-triangular form derived here. This type of matrix was encountered and analyzed in the context of generalized queueing systems.
Additionally, the random-coefficient model is another interesting alternative, in which the degradation growth across consecutive inspection periods is not independent. In this case, the system’s state would need to be augmented to include the random coefficient values, thereby introducing additional complexity to the analysis. Exploring these alternative degradation processes could provide insights into how the maintenance policy, optimal limits, and time between inspections would need to be adapted for different types of degrading systems.
Finally, the proposed analysis relies on the standard assumptions of perfect inspections and as-good-as-new maintenance actions and focuses on a single-component system. In practical settings, inspection outcomes may be subject to misclassification errors, maintenance actions may result in partial restoration rather than full renewal, and several interacting components may need to be coordinated, all of which can affect the optimal inspection sequence and degradation thresholds. Extending the framework to account for imperfect inspections, imperfect maintenance, and multi-component systems with economic, structural, or stochastic dependence is therefore a natural and promising direction for future research. Another interesting research direction is when knowledge of the degradation probability distribution is limited, as it is typically uncertain. Techniques from robust optimization under uncertainty would be best applied in this situation; see, for example Sun et al. 8
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing does not apply to this article, as no new data were created or analyzed in this study.