
Abstract
Accurate remaining useful life (RUL) prediction is helpful to improve the reliability and safety of complex systems. However, in practical engineering applications, it often occurs imperfect or scarce prior degradation information for the degradation system with measurement error (ME). In order to solve this problem, based on the implicit linear Wiener degradation process, a RUL prediction method which reasonably fuses failure time data or multi-source information is proposed in this paper. Firstly, based on the implicit linear Wiener degradation process, we obtain the relationship between the natures of parameters estimation and degradation data by theoretical derivation, which provides a theoretical basis regarding how to fuse multi-source information. Secondly, according to the natures of parameters estimation, we use field degradation data and historical degradation data to estimate the fixed parameters of the two prediction cases respectively, and fuse failure time data into the degradation model by the expectation maximization (EM) algorithm. Then, the Kalman filtering algorithm is used to online update the drift parameter based on field degradation data. Finally, we use some simulation experiments to further verify the natures of parameters estimation, and two practical case studies to verify the superiority of the proposed method.
Keywords
Introduction
In practical engineering applications, the performance of the equipment changes cumulatively over time, which may lead to equipment shutdown and even accidents when its degradation level exceeds the failure threshold. 1 Accurate remaining useful life (RUL) prediction helps operators make correct maintenance decisions before the equipment approaches failure, so as to effectively improve the reliability and safety and reduce the economic cost of the equipment. 2 Here, RUL is defined as the length of time from the present time to the failure time of the equipment. 3 In recent years, with the rapid development of aerospace, military, and other high reliability fields, statistical data-driven RUL prediction method has become a popular research issue in the field of reliability.4–6
Statistical data-driven RUL prediction method can make full use of the degradation data of congeneric equipment. 7 Its main principle is to estimate the unknown parameters representing the common characteristics of degradation processes based on historical degradation data or failure time data, then online update the random parameters representing the unit-to-unit variability among equipment based on the field degradation data detected in real time, and finally predict the RUL by the probability density function (PDF) of RUL. Among them, the failure time data reveals the reliability information on the time scale, the historical degradation data describes the degradation characteristics of the failure process, 8 and the field degradation data represents the individual characteristic of the assessed equipment. Although these three kinds of data contain different information, they can all be used for RUL prediction. Due to the randomness of the degradation process, stochastic processes are often used to predict RUL. 9 RUL prediction methods based on stochastic processes have the advantages of clear physical explanations and great mathematical properties. Gebraeel et al. 10 are the first authors using Bayesian method to reasonably fuse field degradation information and prior degradation information. This method is first used for random coefficient regression model,10–12 and then applied to Gamma process, 13 two-phase Gamma process, 14 inverse Gaussian process, 15 inverse Gaussian process with random effects, 16 Wiener degradation process, 17 two-phase Wiener process, 18 Wiener process with skew-normal random effects, 19 adaptive Wiener process, 20 etc. Since Wiener process model is suitable for monotonic and nonmonotonic degradation systems simultaneously, it has been widely used for many equipment in recent years.21,22 However, in practical engineering applications, it often occurs imperfect or scarce prior degradation information, which may lead to inaccurate or impossible estimation of prior parameters,11,23 and further lead to accuracy reduction or even failure of RUL prediction.9,17 In the existing literature, there are mainly two ways to solve this problem.
The first way is to combine expectation maximization (EM) algorithm and Bayesian method, which was first proposed by Wang et al. 24 to fit the adaptive Brownian motion model with drift parameter. Then, Si et al. 17 used Bayesian updating method and EM algorithm to update the parameters and the RUL distribution, and deduced an accurate and closed RUL distribution function based on the linear Wiener degradation process. Later, this method has been applied to implicit linear Wiener degradation process, 25 nonlinear Wiener degradation process,26,27 and implicit nonlinear Wiener degradation process.20,28,29 The combination of EM algorithm and Bayesian method can overcome the influence of imperfect or scarce prior information on RUL prediction. However, the reason why this method can obtain better prediction results than the traditional Bayesian method is still unclear. By assuming that the drift parameter is fixed, Tang et al. 30 deduced the analytical expression of parameters based on the implicit linear Wiener degradation process, and proved that the combined algorithm has the same estimation results as the traditional maximum likelihood estimation (MLE) method. It indicates that EM algorithm completely gets rid of the influence of prior information and only depends on field degradation data. Based on this conclusion, Tang et al. 30 proposed a heuristic algorithm to reasonably fuse prior information and field degradation data for linear degradation model. Then, Changhao et al. 23 generalized it to the nonlinear Wiener degradation process, and Han et al. 31 further generalized it to the implicit nonlinear Wiener degradation process.
The second way is to fuse multi-source information. Generally, there are three kinds of data used for parameters estimation, that is, historical degradation data of congeneric equipment (including accelerated degradation data 32 ), failure time data of congeneric equipment, and field degradation data of the assessed equipment. How to use the degradation information contained in these three kinds of data to predict the RUL is called the RUL prediction method with fusing multi-source information. Tang et al. 33 obtained the relationship between the parameters estimation and the characteristics of degradation data based on the basic linear Wiener degradation process, which provides a theoretical basis regarding how to fuse multi-source information. However, in practical engineering applications, there may be scarce failure time data or historical degradation data especially for new equipment. Therefore, it is necessary to reasonably fuse these two kinds of data to estimate the unknown prior parameters. At present, some scholars have used the method with fusing multi-source information to predict RUL.34–37 For example, due to the different stress between accelerated degradation test data and field degradation data, Wang et al. 34 proposed a Bayesian evaluation method based on joint likelihood function to fuse accelerated degradation test data and failure time data. Pang et al. 35 further studied the method with fusing accelerated degradation test data and failure time data based on nonlinear Wiener degradation process. Liu et al. 36 fused a small amount of failure time data and degradation data to predict the RUL of equipment under the Bayesian framework. Zhang et al. 37 proposed a new Bayesian framework to fuse binary degradation data and failure time data for reliability analysis. However, these literatures did not consider the influence of random effects. Tang et al. 38 proved that the RUL prediction with considering random effects could obtain better results in theory. However, Tang et al. 38 only used the historical degradation data of congeneric equipment when estimating unknown parameters, without fusing the failure time data. Recently, Tang et al. 33 proposed a RUL prediction method based on the basic linear Wiener degradation process and the nonlinear Wiener degradation process respectively, which fuses failure time data and considering random effects, and verified the superiority of this method by comparing it with the traditional MLE method. Wang et al. 39 further proposed a RUL prediction method based on the basic linear Wiener degradation process and the nonlinear Wiener degradation process respectively, which fuses multi-source information and considering random effects, and verified the superiority of the method by comparing it with the RUL prediction method using only degradation data or failure time data. However, due to the measuring instrument, the technical level of the operators and environmental factors, the measured degradation data may have measurement error (ME), which could not directly reflect the actual degradation state. 40 Considering that the RUL prediction results were influenced by three sources of variability, that is, temporal variability, unit-to-unit variability, and measurement variability, Si et al. 41 proposed an online updating method of random parameters based on Kalman filter algorithm, and obtained the analytical expression of PDF of RUL. For the degradation equipment with ME, Tang et al. 42 proved that if the influence of ME is not considered, which may lead to premature maintenance, thus increase the maintenance cost. Therefore, the influence of ME needs to be considered when predicting RUL. However, in the existing literature, the method with fusing multi-source information is only used in the basic Wiener degradation process, and has not been generalized to the implicit Wiener degradation process.
From the above review over related works, the RUL prediction method under imperfect or scarce prior information has not been studied thoroughly. Therefore, this paper mainly studies the RUL prediction method based on the implicit linear Wiener degradation process. Firstly, we obtain some natures regarding parameters estimation of the implicit linear Wiener degradation process model, which has not been reported before. Secondly, according to these natures of parameters estimation, we propose a RUL prediction method with fusing multi-source information based on the implicit linear Wiener degradation process model. When the prior degradation information is imperfect, this method uses field degradation data to estimate the fixed parameters, and then uses failure time data to estimate the prior drift parameter. When the prior degradation information is scarce, this method estimates the prior parameters by fusing failure time data and historical degradation data. In the above two cases, the drift parameter and the actual degradation state was online updated based on field degradation data. Finally, we use some simulation experiments and two practical case studies to verify the effectiveness of the proposed method.
The remainders of this paper are presented as follow. Section “Natures of parameters estimation for the implicit linear Wiener degradation process” analyzes the natures of parameters estimation based on the implicit linear Wiener degradation process. Section “RUL prediction of the implicit linear Wiener degradation process” introduces the RUL prediction method of the implicit linear Wiener degradation process. In order to solve the problem of imperfect or scarce prior degradation information, a RUL prediction method with fusing multi-source information based on the implicit linear Wiener degradation is proposed in Section “Prior parameters estimation of the implicit linear Wiener degradation process based on multi-source information”. Section “Experimental studies” verifies the effectiveness of the proposed RUL prediction method by some simulation experiments and two practical case studies.
Natures of parameters estimation for the implicit linear Wiener degradation process
The prior parameters describe the common degradation characteristics of equipment. Accurate estimation of the prior parameters is helpful to improve the accuracy of RUL prediction. In practical engineering applications, the observed degradation data often have ME. If the influence of ME is not considered, the prediction accuracy of RUL could be reduced, and it could even obtain wrong estimation results. 42 Therefore, this section analyzes the natures of parameters estimation based on the implicit linear Wiener degradation process.
Let

where
Suppose that there are

Let

where,
Let

where
The estimation of
At present, some natures of the unbiased parameters estimation have been proved by scholars, as shown in Lemma 1.
38
Since it is very complicated to obtain the expression of all parameters at the same time, here it is assumed that

More details about the proof process can be found in Tang et al. 38 Lemma 1 gives the expectation of unbiased parameters estimation. Based on Lemma 1, we can know that the results of unbiased estimation parameters can converge to the actual value, which reflects the effectiveness of unbiased parameter estimation method. However, which factors are related to the accuracy of parameters estimation? It cannot be obtained from Lemma 1. Therefore, we further deduce the variance of unbiased parameters estimation, and the specific results are shown in Theorem 1.




where
Since it is very complicated to directly calculate the variance of
According to equation (14), we have

In order to calculate the expectation and the variance of

According to equation (16) and the natures of chi square distribution, we can obtain the expectation and variance of
Additionally, since
Based on equation (16), we can obtain the expectation and variance of
This completes the proof.
According to Theorem 1, we have obtained the variance of unbiased parameters estimation
According to equation (22), we can observe that the expressions of


Similarly,
(1) From equations (10), (12) and (13), we can observe that the estimation accuracy of
(2) According to equations (11) and (24), the estimation accuracy of
RUL prediction of the implicit linear Wiener degradation process
Online updating of random parameters based on Kalman filter algorithm
As mentioned above, the randomness of the drift parameter describes the unit-to-unit variability. In order to adapt to the individual degradation characteristics of the assessed unit, it is necessary to online update the drift parameter using the field degradation data. Since the detected degradation data have ME, it cannot directly reflect the actual degradation state. Therefore, the Kalman filter algorithm can be used to online update the drift parameter and estimate the current degradation state in real time. 41
For the implicit linear Wiener degradation process as shown in equation (1), when the degradation state

where
Due to the influence of ME, the actual degradation state and drift parameter are hidden state. Hence, the state space equation (25) can be further expressed as 41

According to Si et al.,
41
the state equation can be updated by Kalman filter algorithm. Let
where
RUL prediction
RUL refers to the length of time from the present time to the failure time. Define the failure threshold as

Based on equation (1), when the actual degradation state
However, due to the influence of ME,
where
Prior parameters estimation of the implicit linear Wiener degradation process based on multi-source information
Prior parameters estimation based on failure time data
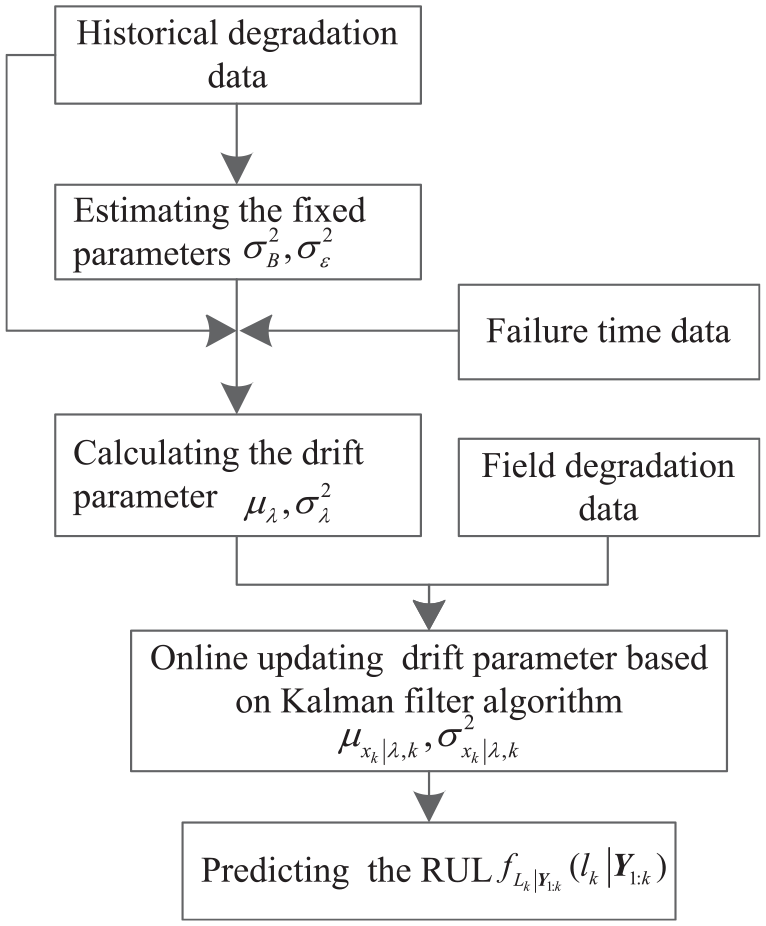
In practical engineering applications, we often encounter imperfect prior information. The traditional MLE method may not obtain the correct prior parameters estimation results, or even estimate the prior parameters. In order to solve this problem, Tang et al. 33 proposed a RUL prediction method that reasonably fuses failure time data and field degradation information. However, Tang et al. 33 did not consider the influence of ME, which may increase the uncertainty of RUL prediction. Therefore, based on Tang et al., 33 this subsection further proposes a method with fusing failure time data for the implicit linear Wiener degradation process. The flow chart is shown in Figure 1.
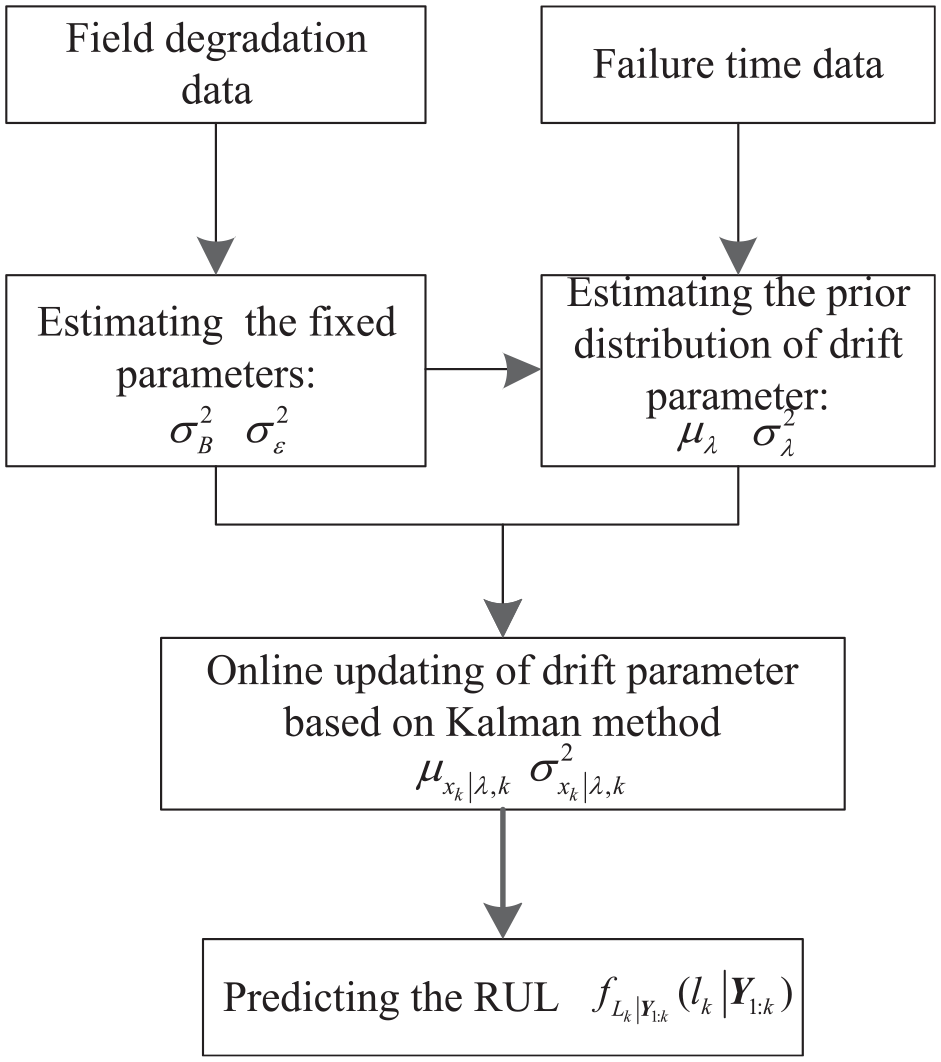
The flow chart of RUL prediction based on failure time data.
The flow chart can be explained as follows. Firstly, the fixed parameters
Define
For the degradation process modeling of the single assessed unit, it is not necessary to consider the influence of random effects when establishing the degradation model of the implicit linear Wiener degradation process. Since there is no individual difference,
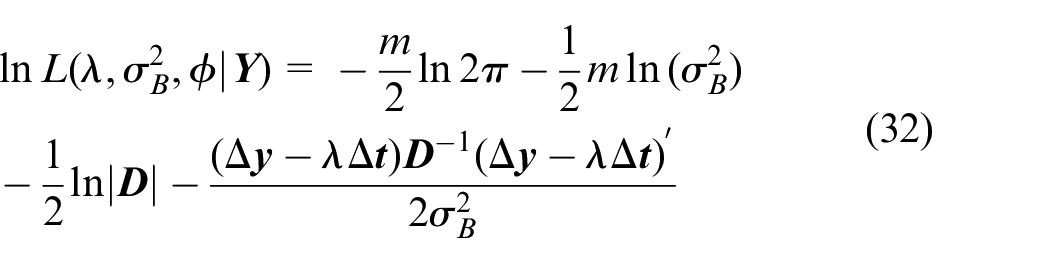
Taking the partial derivatives of
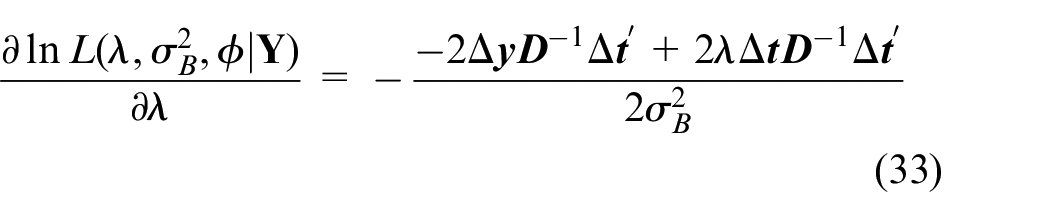
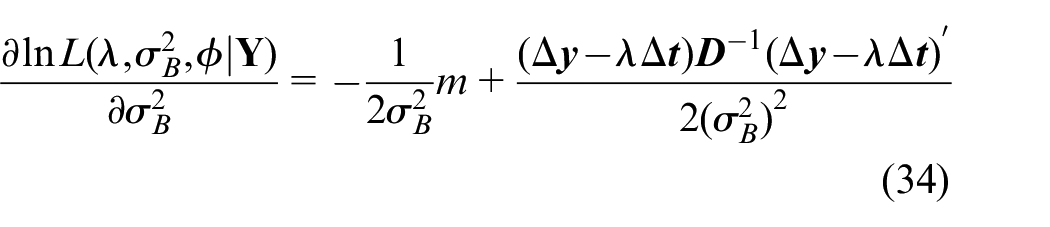
By setting equations (33) and (34) to zero, the restricted estimation for


By substituting equation (36) into equation (32), the expression of the profile log-likelihood function regarding
The estimation of
According to conclusions in Chien-Yu and Sheng-Tsaing,
44
the lifetime distribution function of the implicit linear Wiener degradation process is not affected by ME. Then, the prior distribution of drift parameter

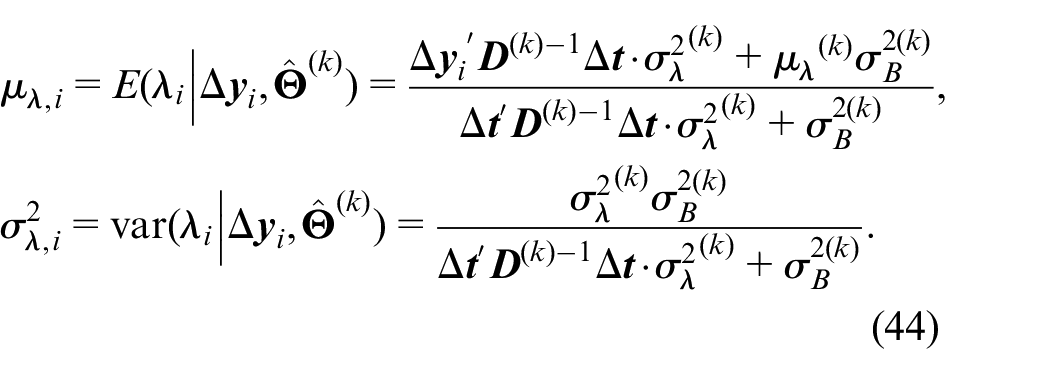
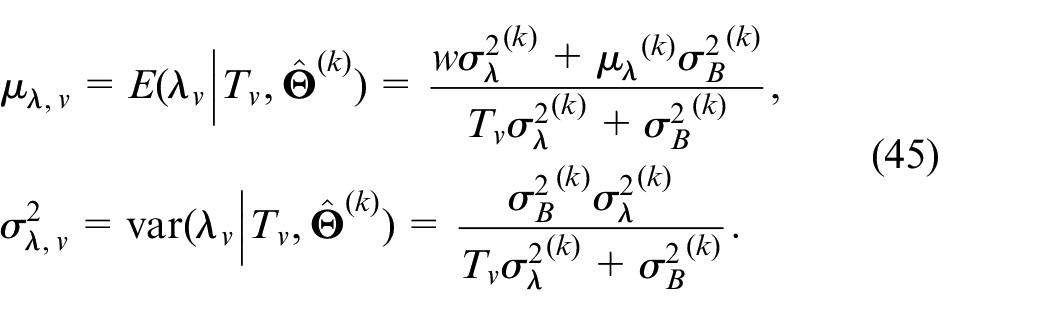
Based on Lemma 3, given
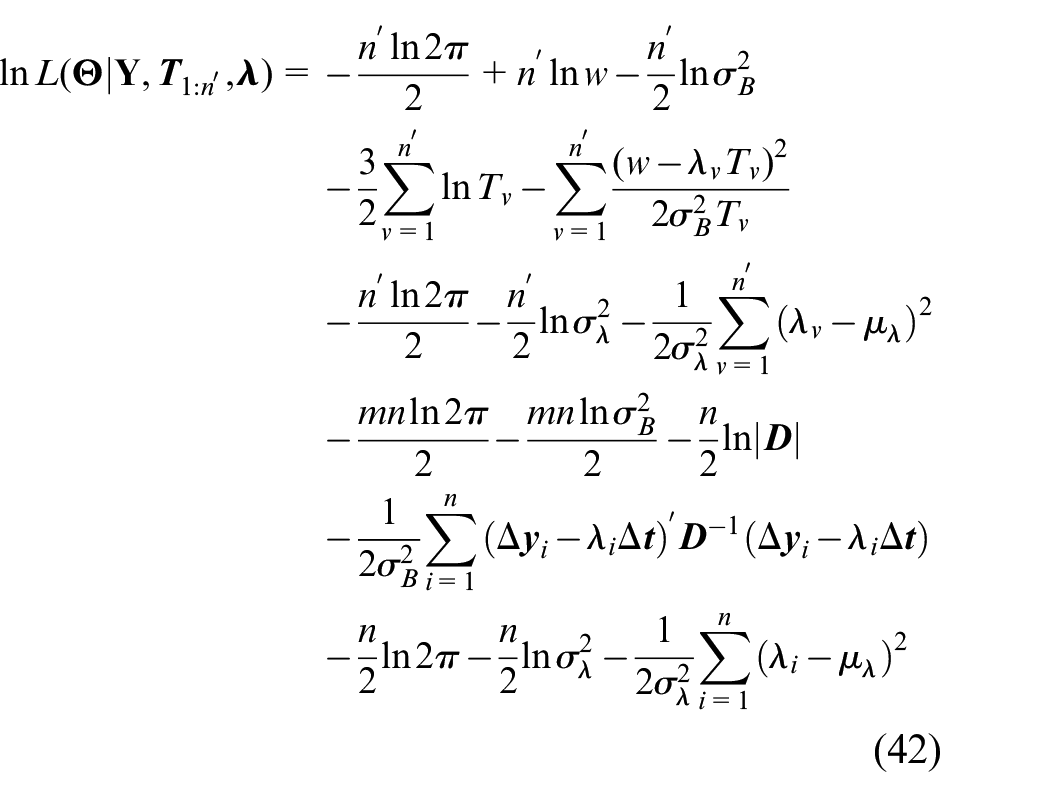
Suppose that
where

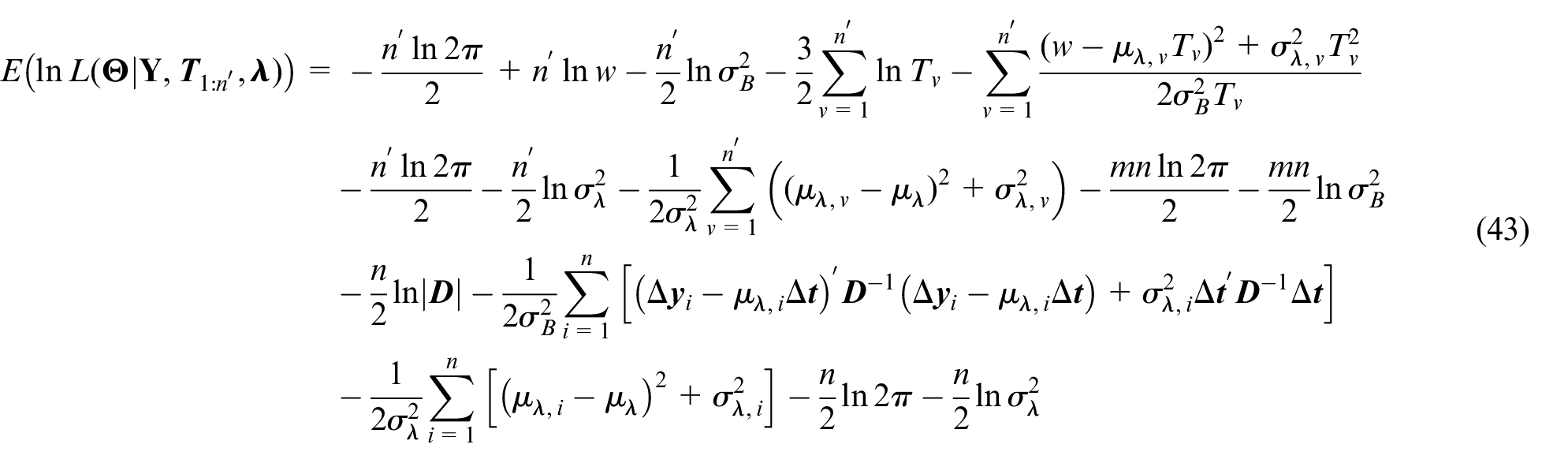
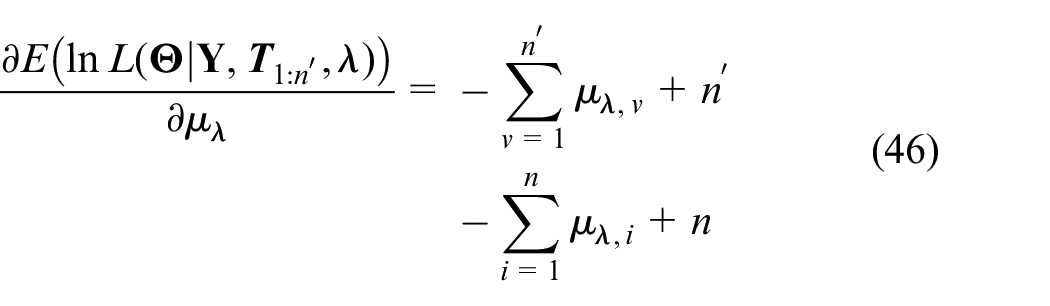
Taking the partial derivatives of
Then, the above E-step and M-step are iterated until
Prior parameters estimation based on multi source information
When prior degradation information is scarce and there are both prior historical degradation data and failure time data, according to the natures of parameters estimation obtained in Section “Natures of parameters estimation for the implicit linear Wiener degradation process,” we can fuse as much degradation data as possible to further improve the accuracy of unknown parameters estimation. Recently, to solve this problem, Wang et al. 39 proposed a RUL prediction method with fusing multi-source information and considering random effects. However, Wang et al. 39 did not consider the influence of ME. In this subsection, we further extend this method to the implicit linear Wiener degradation process, and the specific flow chart is shown in Figure 2.
The flow chart of RUL prediction based on multi source information.
The flow chart can be explained as follows. Firstly, the fixed parameters
Suppose that there are
Suppose that
where
Taking the partial derivatives of
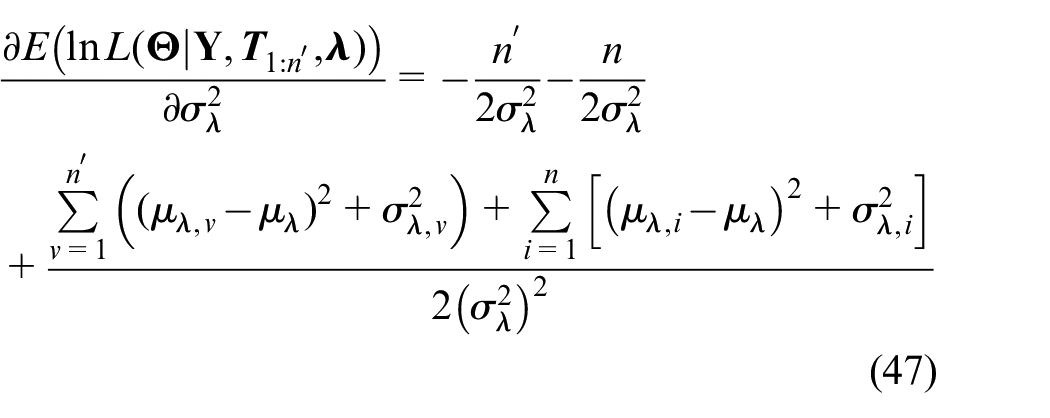
Then, by setting equations (46) and (47) to zero, we can obtain the expression of the (k + 1)th iteration as follows.
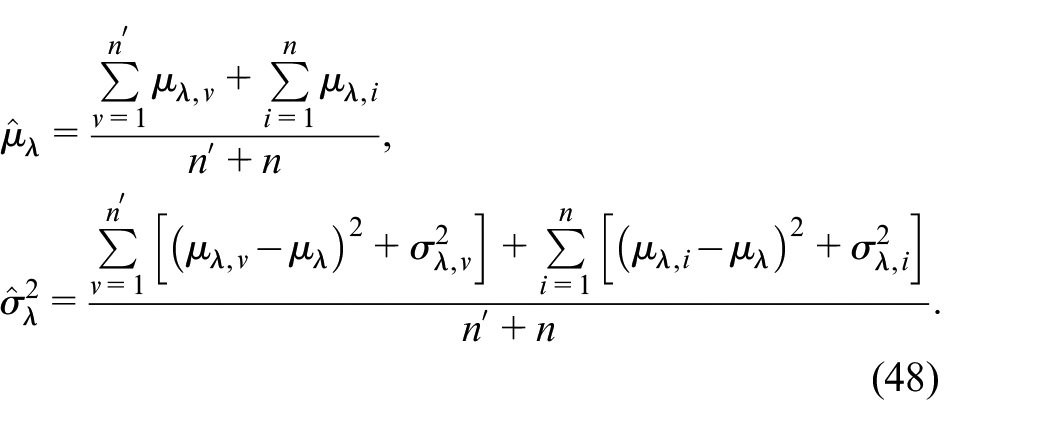
Similarly, the above E-step and M-step are iterated until
Experimental studies
In this section, the effectiveness and superiority of the proposed method are verified by some simulation experiments and two practical case studies. Firstly, the Monte Carlo algorithm is used to generate the simulation data of the implicit linear Wiener degradation process to verify the natures of parameters estimation obtained in Section “Natures of parameters estimation for the implicit linear Wiener degradation process.” Secondly, the lithium battery degradation data is used to verify the superiority of the method with fusing failure time data, and the laser degradation data is used to verify the superiority of the method with fusing multi-source information.
Simulation experiments
Tang et al. 33 analyzed the natures of parameters estimation based on the basic linear Wiener degradation process model, and concluded that the accuracy of parameters estimation is proportional to the number of units and the detection times of degradation data. According to the conclusions in Section “Natures of parameters estimation for the implicit linear Wiener degradation process,” when the degradation data have ME, the accuracy of parameters estimation of the implicit Wiener degradation process model also has similar natures. In this subsection, we further use simulation experiments to verify these natures.
The parameters are assumed as
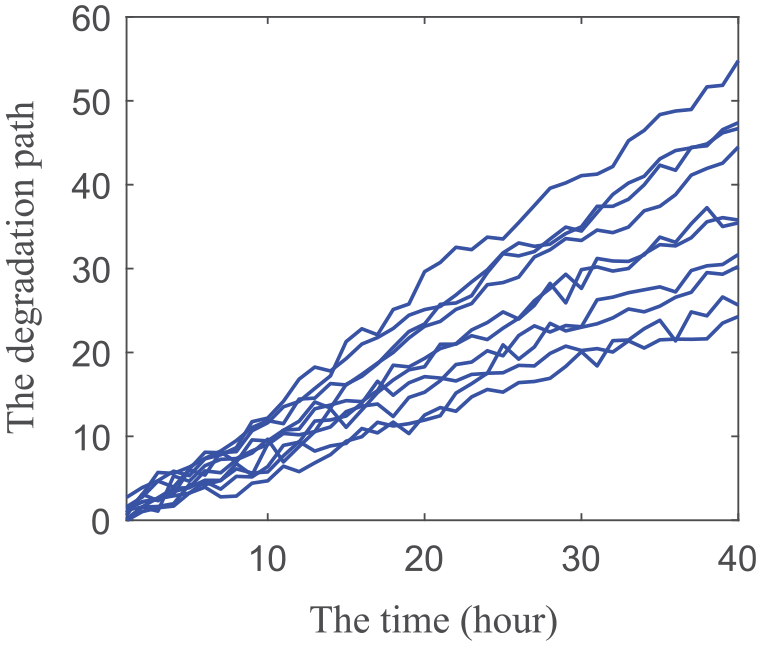
Some degradation paths.
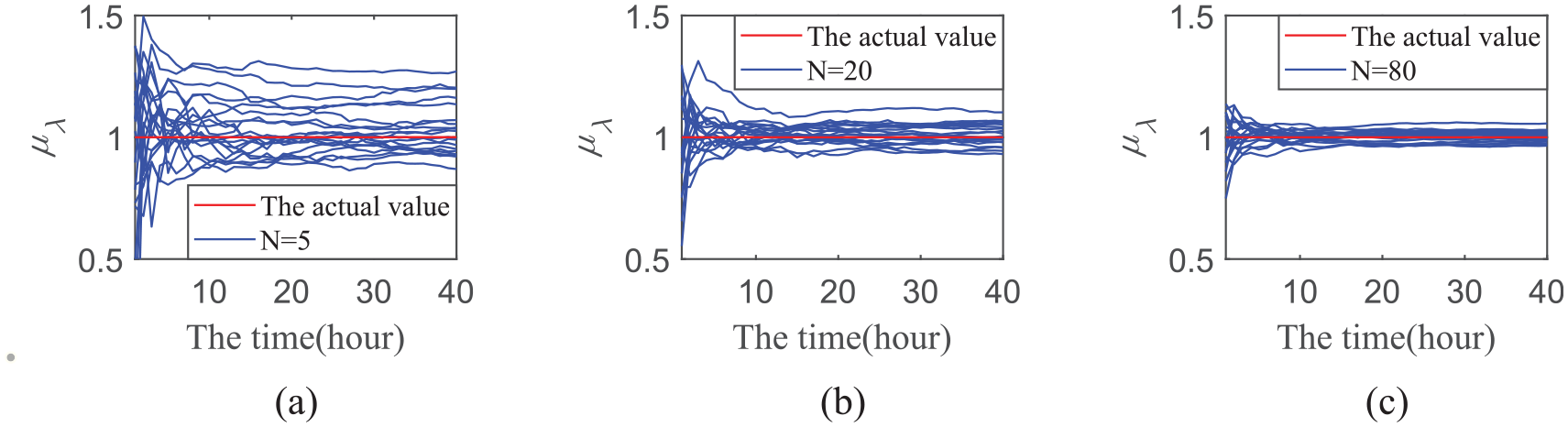
The estimation of
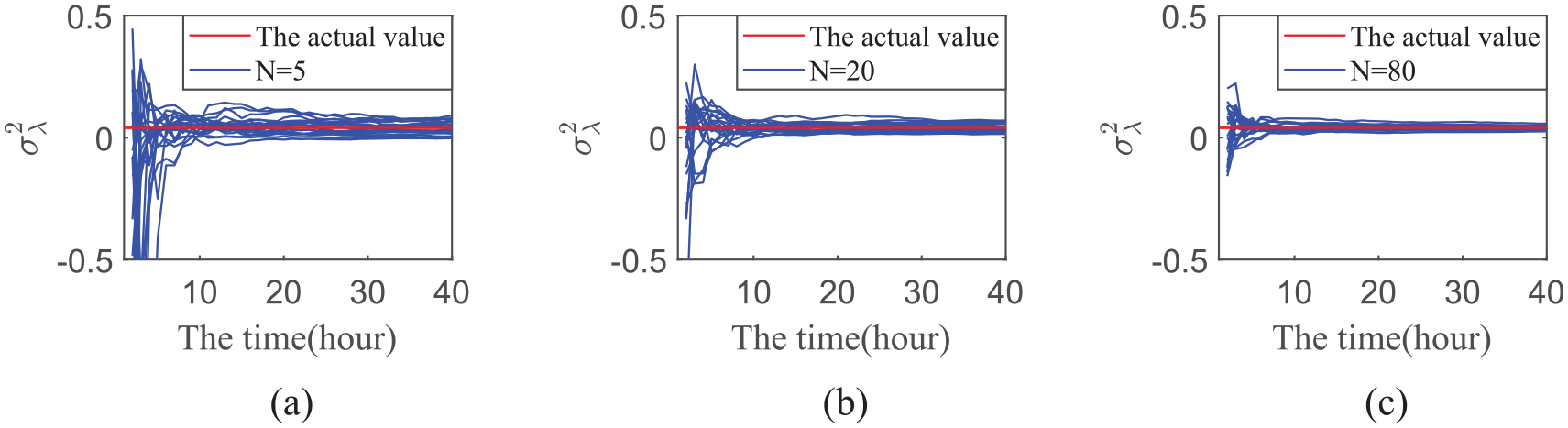
The estimation of
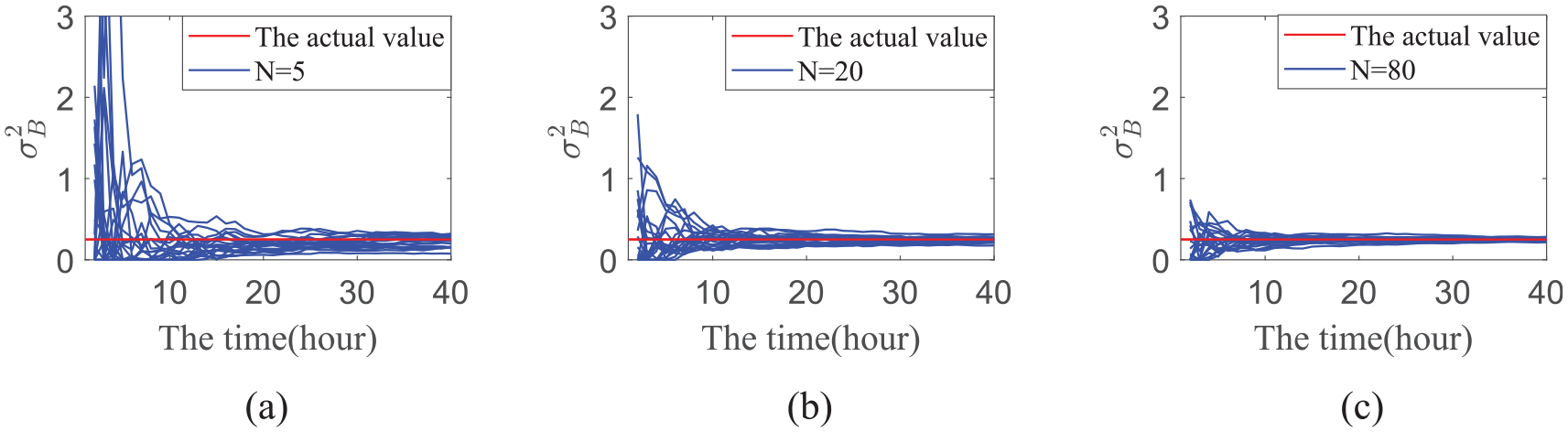
The estimation of
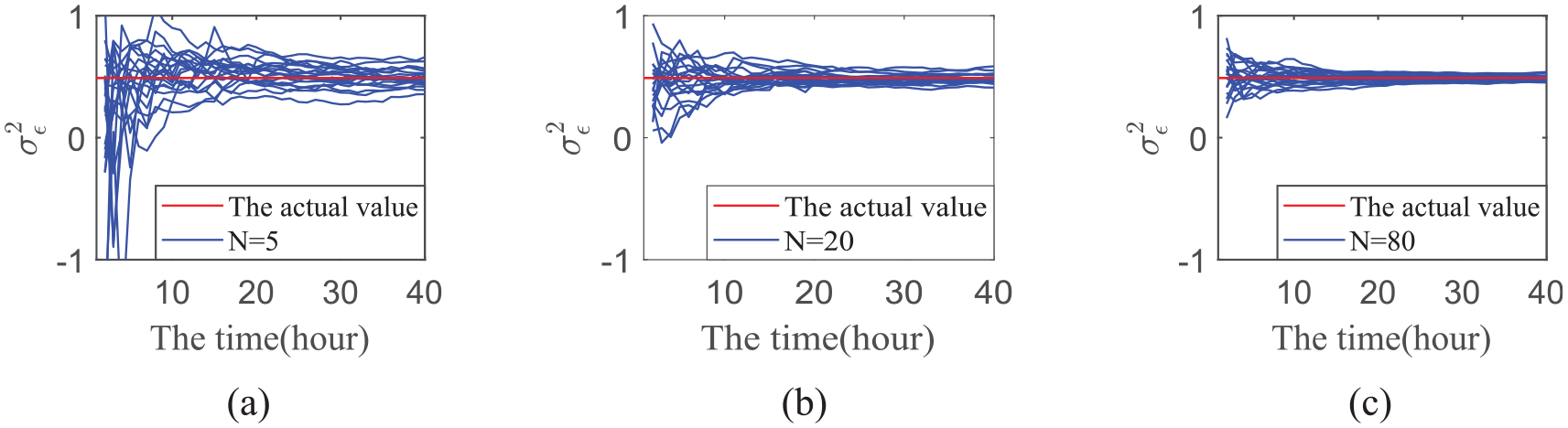
The estimation of
It can be seen from Figures 4 and 5 that when the number
Additionally, from Figures 6 and 7, it can be observed that when the number of units
To sum up, simulation experiments verify the natures of parameters estimation obtained in Section “Natures of parameters estimation for the implicit linear Wiener degradation process,” and provide a theoretical basis for RUL prediction based on the method with fusing multi-source information and considering ME.
Predicting the RUL based on failure time data
In this subsection, we apply the degradation data published by NASA to verify the effectiveness of the RUL prediction method proposed in this paper when the prior degradation information is imperfect. The degradation data includes the capacity degradation data of four lithium batteries of the same type, which are repeatedly cycled under three operating modes of charging, discharging, and impedance measurement at room temperature. The capacity of lithium battery may regenerate after a long rest, which is also called relaxation effect.
45
In practical operation, since the rest time of lithium battery is uncertain, RUL may not be able to be predicted accurately. Therefore, it is necessary to eliminate the relaxation effect in the original data. The degradation path after eliminating the relaxation effect is shown in Figure 8. For more details about how to eliminate the relaxation effect, see references Tang et al.
30
and Jin et al.
45
and references therein. Generally, when the battery capacity degrades to
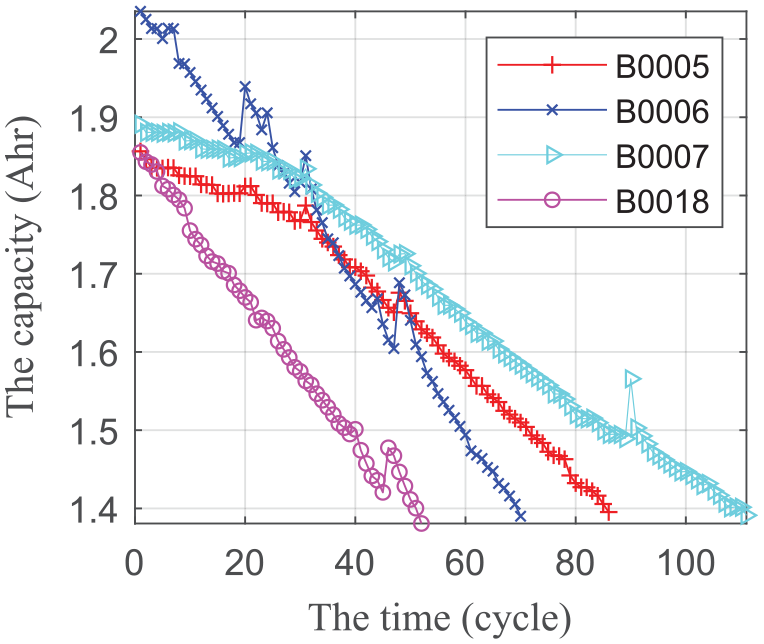
The degradation path of lithium battery capacity.
From Figure 8, we can observe that the capacity degradation curves of B0005 and B0007 have nonlinear characteristics, while the capacity degradation curves of B0006 and B0018 have linear characteristics, if the parameters are estimated directly using historical degradation data, the estimation results will be far from the actual value, thus the accuracy of RUL prediction will be reduced,
33
which can be regarded as the case that the prior degradation information is imperfect. In fact, these four groups of degradation data not only contain degradation data information, but also contain failure time information, and their failure time information can be used to predict the RUL.
33
For simplicity, the proposed RUL prediction method with fusing failure time data is referred to as
Figure 9 shows the RUL distributions of the assessed battery B00018 at some times, and Figure 10 shows the RUL distribution in the 44th cycle. It can be observed that the RUL distributions of
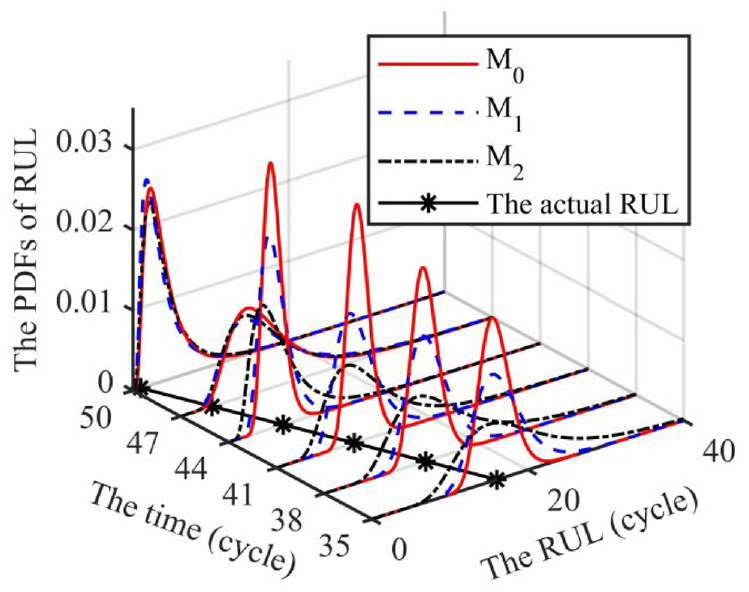
The estimated RULs at some cycle times.
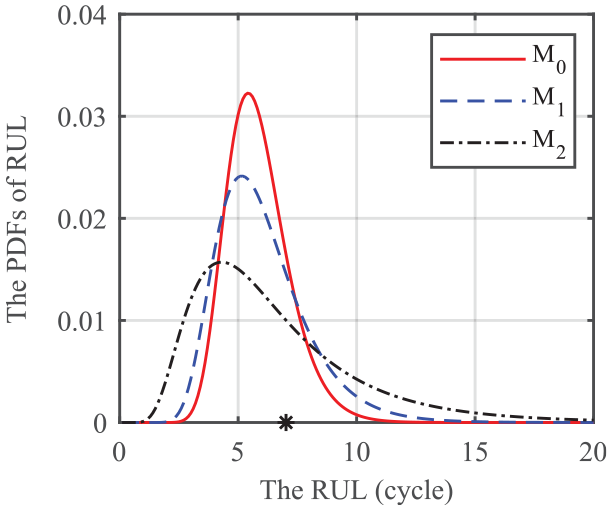
The estimated RULs at 44 cycle.
Then, we analyze the RUL prediction accuracy of the three prediction methods by comparing the results of parameters estimation. The parameters estimated in real time are shown in Figure 11. From Figure 11, it can be observed that
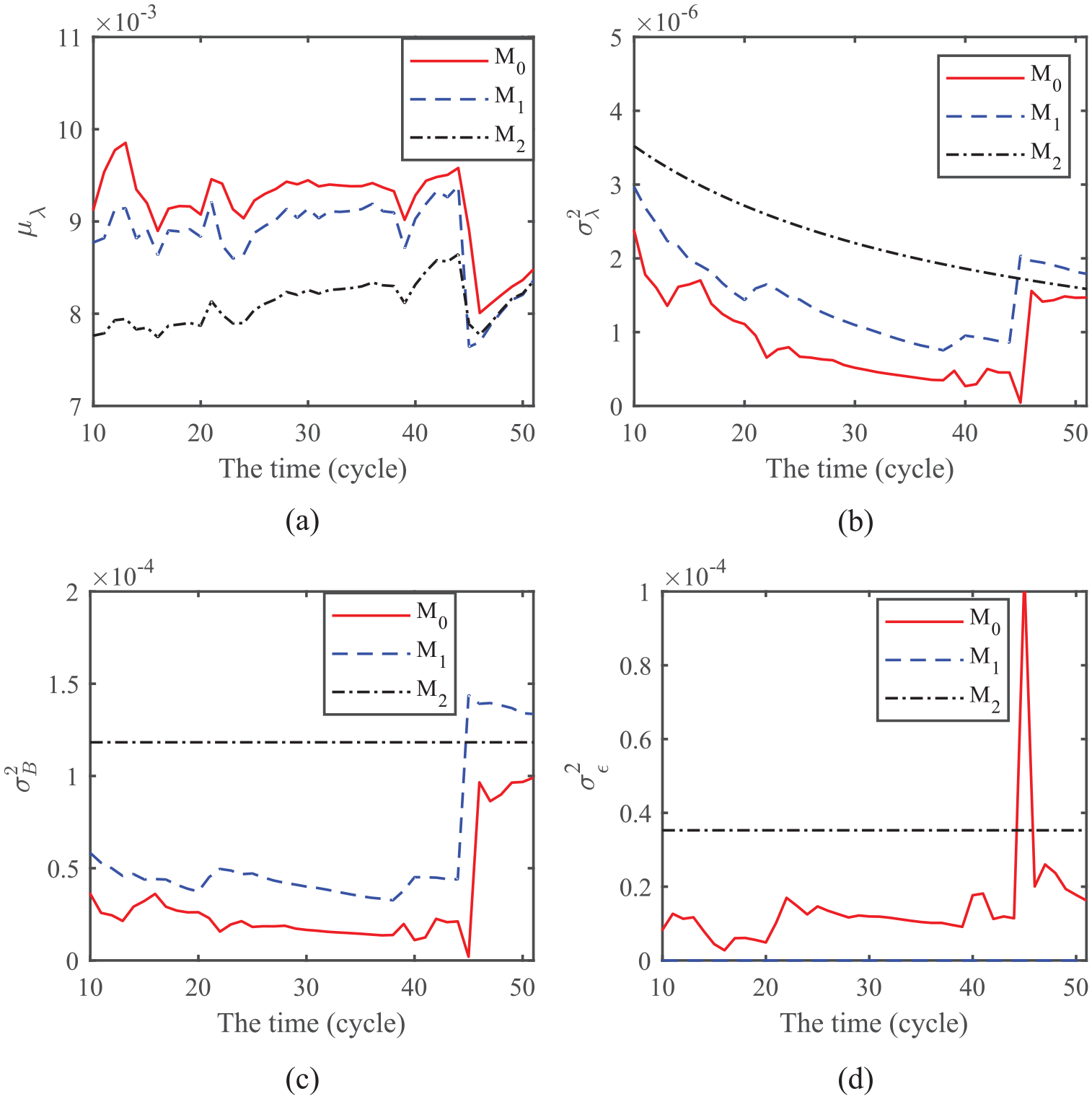
The posterior parameters of
In order to further distinguish the prediction accuracy of three prediction methods, the mean square errors (MSEs) of each model in each cycle are calculated. The calculation expression of MSEs at the kth time cycle can be written as follows.

Figure 12 shows the MSEs of RULs of three prediction methods. It can be observed that the MSEs of
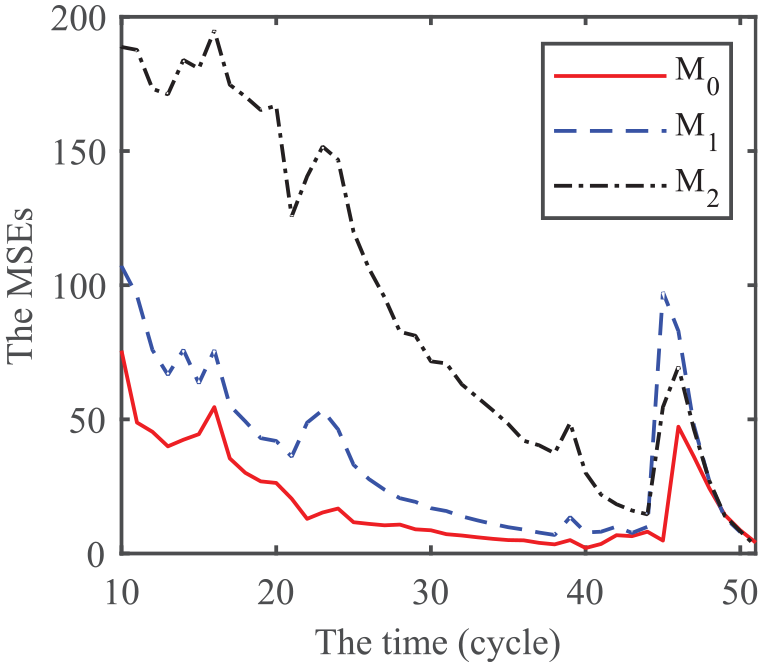
The MSEs of RULs of
Predicting the RUL based on multi source information
In this subsection, we apply the laser degradation data provided by Meeker et al.
46
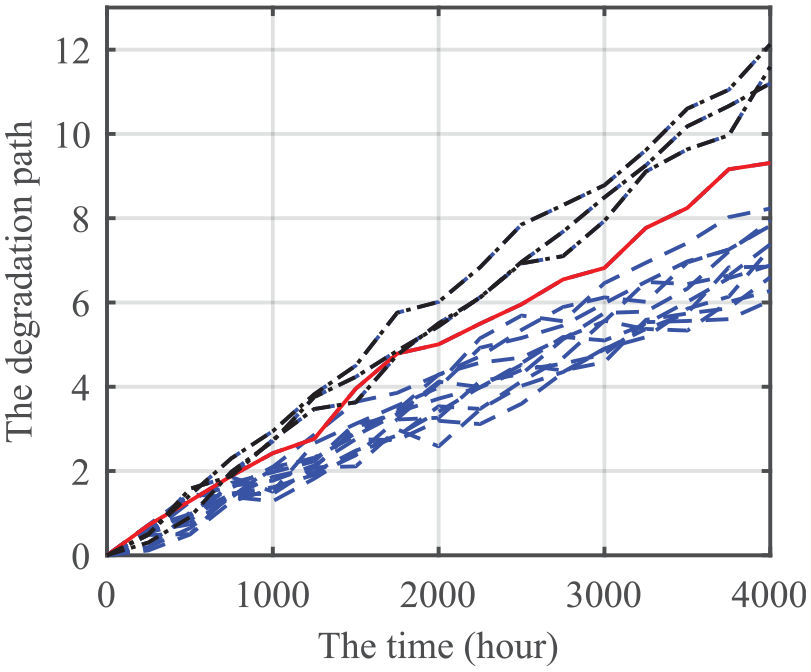
to verify the effectiveness of the RUL prediction method with fusing multi-source information and considering the influence of ME. The degradation data includes 15 units, and the degradation state of each unit is detected at the same time. In addition, the detection interval is 250 h and each unit includes 16 measurement points as shown in Figure 13. In order to verify the superiority of the method with fusing multi-source information, it is assumed that among the 15 groups of degradation data, 1 group of degradation data is the field degradation data of the assessed unit, 11 groups of degradation data are historical degradation data, and 3 groups of degradation data can only obtain its failure time.
39
For simplicity, the RUL prediction method with fusing multi-source information and considering the influence of ME proposed in this paper is referred to as
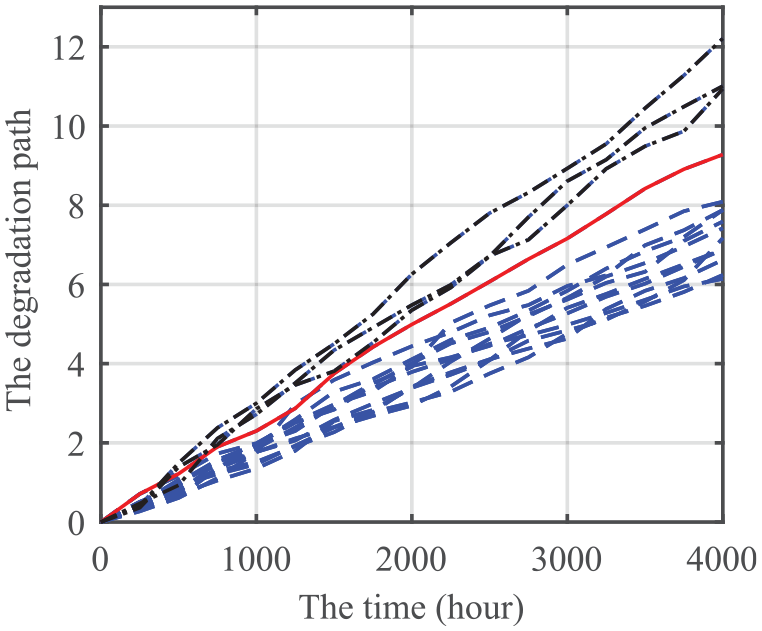
Laser data degradation path.
From Figure 13, it can be observed that the degradation data has good linear degradation characteristics. In this subsection, we assume that the red solid line in Figure 13 is the assessed unit, the blue dotted line is the historical degradation data, which is used to estimate the unknown parameters of
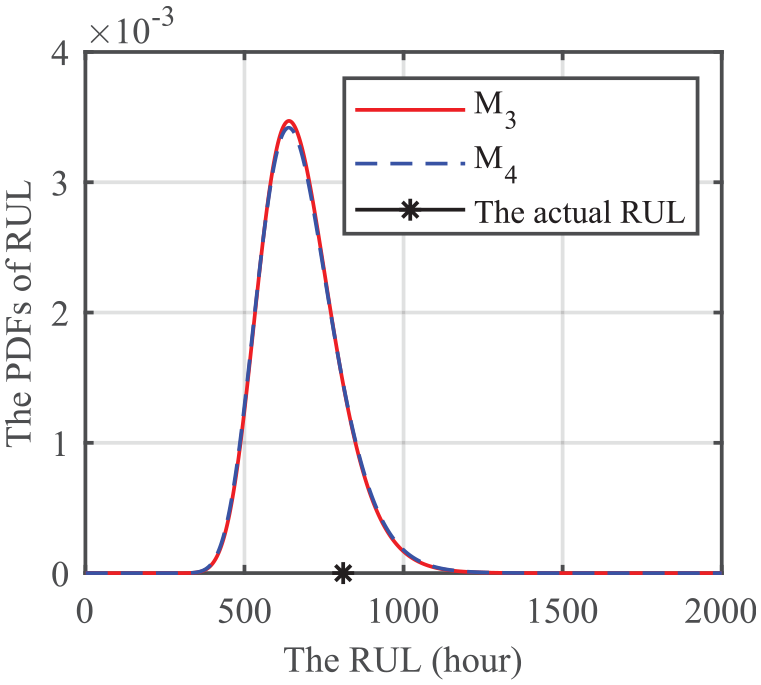
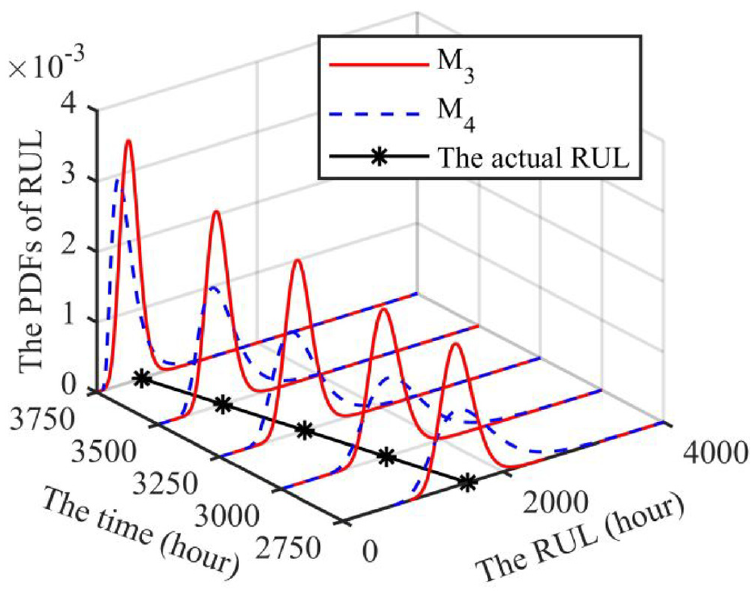
Additionally, Figure 14 shows the RUL distributions of the assessed unit at some points, and Figure 15 shows the RUL distributions of the assessed unit at 3750 h. It can be seen that although the RUL distributions of
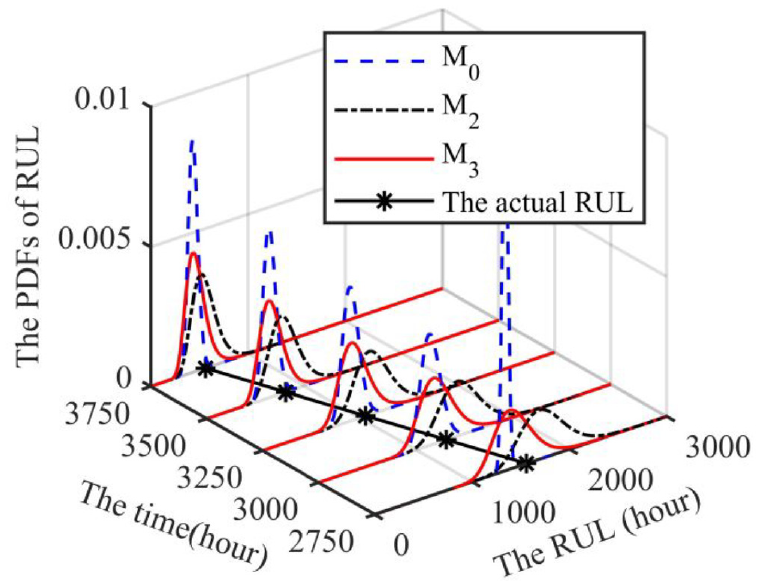
The estimated RULs at some points.
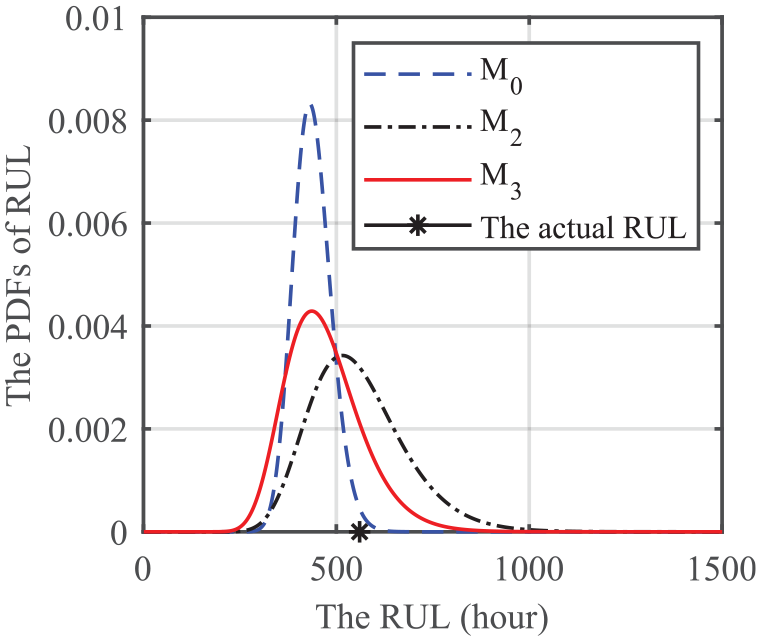
The estimated RULs at 3750 h.
Figure 16 shows the posterior parameters of three prediction methods. It can be observed that
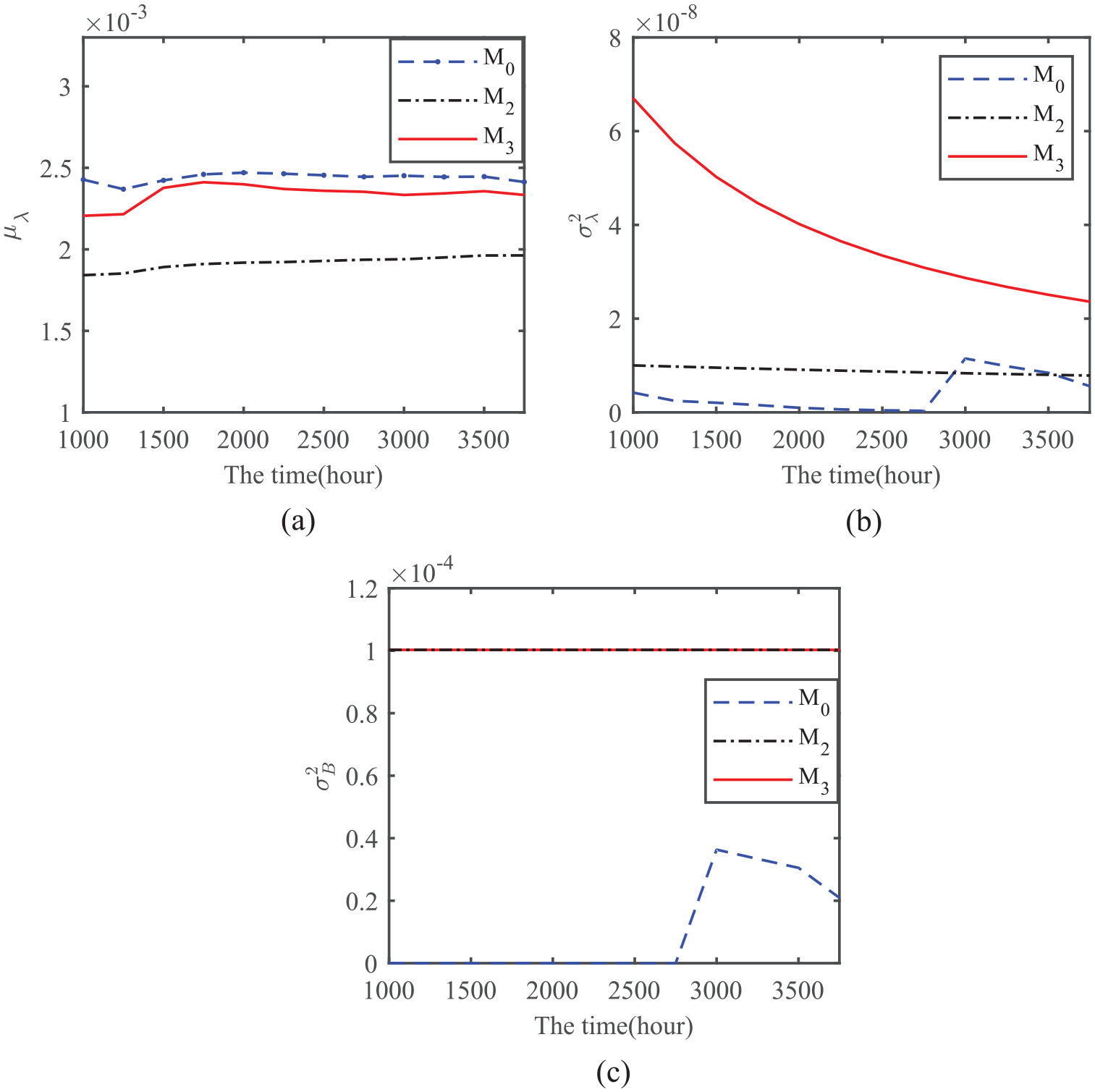
The posterior parameters of
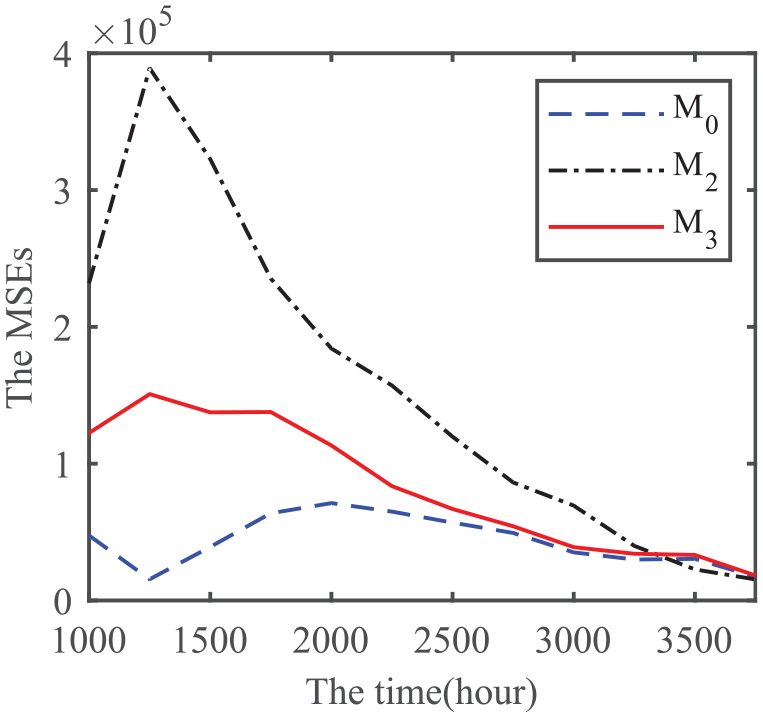
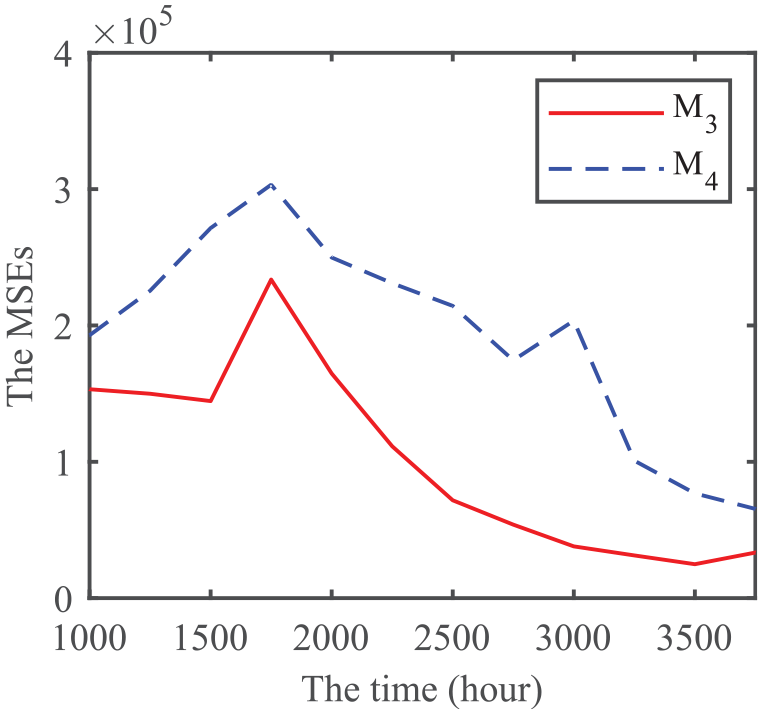
The MSEs of RULs at some points.
In order to further verify the RUL prediction method proposed in this paper, which fuses multi-source information and considering ME, can improve the accuracy of RUL prediction for degradation systems with ME, the RUL prediction method with fusing multi-source information based on the basic linear Wiener degradation process proposed in Wang et al.
39
is referred to as
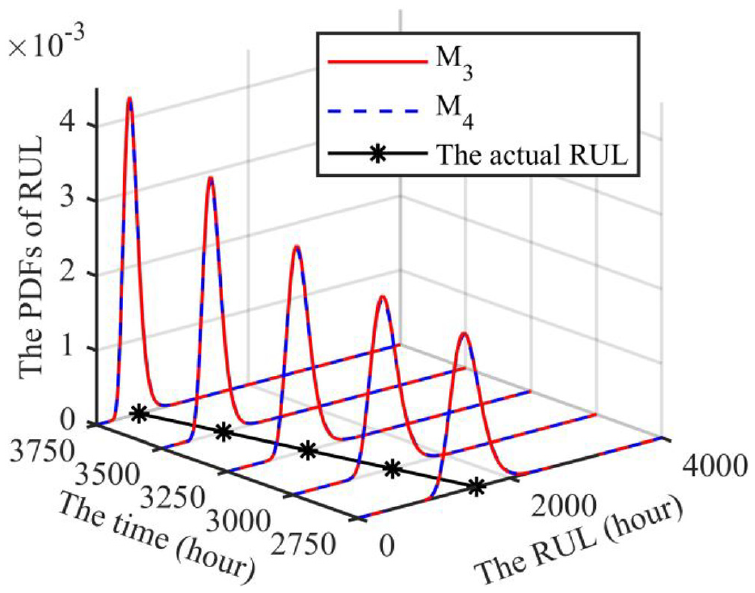
The estimated RULs at some points.
The estimated RULs at 3500 h.
In order to significantly compare the effect of considering ME, we appropriately add a ME following normal distribution
The degradation path of simulated laser data.
Similarly, the failure time of black dotted lines in Figure 20 are 3450.29, 3571.71, and 3298.04 h, respectively. Figure 21 shows the RUL distributions of
The estimated RULs at some points.
The MSEs of RULs at some points.
Conclusions
Accurate parameters estimation is the premise to ensure the accuracy of RUL prediction. In this paper, we first analyze the natures of parameters estimation of the implicit linear Wiener degradation process. Then, based on these natures, a RUL prediction method with fusing multi-source information is proposed for the implicit linear Wiener degradation process. Finally, we use some simulation experiments and two practical cases studies to verify the natures of parameters estimation and the effectiveness of the proposed RUL prediction method. The main contributions of this paper can be summarized as follows:
(1) Based on the unbiased parameter estimation results of the implicit linear Wiener degradation process, the variances of the estimated parameters are deduced. And the relationship between the accuracy of parameters estimation and the number of units, the length of detection time and the number of detection times are analyzed based on the implicit linear Wiener degradation process. It provides a theoretical basis regarding how to reasonably fuse multi-source information for RUL prediction.
(2) For stochastic degradation systems with ME, a RUL prediction method with fusing multi-source information is proposed to deal with the problem that the prior degradation information is imperfect or scarce.
At present, there are many methods that can be used to solve the problem of imperfect and scarce prior degradation information. For example, the RUL prediction method based on Gaussian regression process 47 can use a small amount of historical degradation data to predict the RUL, and the RUL prediction method based on particle filter algorithm 48 can use the field degradation data of the assessed equipment to predict the RUL, and they can all get good prediction results. In order to further improve accuracy of RUL prediction, the comparison of these methods is worth further study in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research reported here was partially supported by the Basic Research Plan of Shaanxi Natural Science Foundation of China (grant no 2022JM-376) and the National Natural Science Foundation of China (grant nos 61703410, 61873175, 61873273, 61773386, 61922089, 72001192).