Consecutive-k systems have been studied extensively in reliability engineering. Linear and circular consecutive-k-out-of-n: F systems with shared component(s) have been studied recently by Lin et al. and Yin and Cui . They considered two adjacent subsystems overlapping with one (multiple) shared component(s), respectively, and obtained system reliability formulas by summing the reliability values for all disjoint cases. As their method is computationally intensive, it would be of interest to develop a simpler and more efficient method for the computation of the reliability function of such systems instead of requiring to list all disjoint cases. In this work, by employing the finite Markov chain imbedding approach, we develop unified formulas as products of matrices for evaluating system reliabilities by redefining the state space of the Markov chain. The results developed here decrease the complexity in the computation of system reliability. Furthermore, the new method is also employed to obtain reliability formulas for Markov-dependent cases. A case study of communication systems is finally presented and some numerical examples are presented to illustrate the developed model and the corresponding results.
The consecutive- system has been a common type of redundancy used for improving system reliability since Kontoleon1 first proposed it. Then, the consecutive--out-of-: F system was studied by Chiang and Niu,2 as one type of consecutive- systems, and it has taken a significant part in the field of reliability over the recent few decades. A consecutive--out-of-: F system consists of components ordered in a line or in a circle and it fails if and only if at least consecutive components fail.2,3 For the circular structure, it is assumed that the first component is adjacent to (and follows) the -th component in the system.3 Chang et al.4 have provided a detailed survey of results on these systems; see also Cui and Dong5 for a recent survey about consecutive and associated challenges.
Due to the enormous practical significance, the reliability modeling and analysis of consecutive -out-of- systems have attracted considerable attention in the reliability literature.6–11 A linear consecutive-, -out-of- system has been discussed by Eryilmaz and Mahmoud.12 Dui et al.13 have proposed joint importance measures for optimal component sequence of a consecutive--out-of- system. Xiang and Levitin14 have discussed a combined -consecutive and -out-of- sliding window system. In practice, consecutive- systems can be applied in oil pipeline systems, telecommunication systems, vacuum systems in accelerators, etc.15 Recently, many researchers discussed some systems considering shared components as the main characteristic.6,16–20 For example, Coolen-Maturi et al.19 introduced a joint survival signature for multiple systems with multiple types of components and with some components being shared by the systems. Considering several coherent systems with some shared components, with independent and identically distributed lifetimes, Zarezadeh et al.20 made use of joint signature to study the joint reliability of the two coherent systems and specifically obtained a pseudo-mixture representation.
The idea of finite Markov chain imbedding approach (FMCIA) was first proposed by Fu21 to study reliabilities of consecutive--out-of-: F systems. In this method, a Markov chain with discrete state space is constructed for describing the states of the system, and transitions of this Markov chain is determined by the states of the components; for more details, see Fu and Koutras.22 Using FMCIA, Koutras23 presented reliabilities of series systems, -out-of-: F systems, consecutive--out-of-: F systems, weighted -out-of- and consecutive--out-of-: F systems, -within-consecutive--out-of-: F systems, and -consecutive--out-of-: F systems. Chadjiconstantinidis and Koutras24 further examined the Birnbaum importance of a weighted--out-of-: F system and a weighted-consecutive -out-of-: F system by using FMCIA. Subsequently, considerable work has been carried out on FMCIA.17,18,25–27 A survey of FMCIA is due to Cui et al.28 This method is highly useful as a tool for system reliability evaluation. The FMCIA is closely connected with the study of scans and runs, as seen in the books of Balakrishnan and Koutras,29 Fu and Lou,30 and Balakrishnan et al.31
Based on an engineering application, Lin et al.16 presented a consecutive--out-of-: F linear zigzag structure as a system that consists of subsystems, each of which is treated as a linear consecutive--out-of-: F subsystem (). Two adjacent subsystems overlap with one shared component. The system is reliable if and only if subsystems are reliable. If subsystems form a circle, then it is referred to as a consecutive--out-of-: F circular polygon structure. Yin and Cui6 defined a consecutive--out-of-: F system with an extension of a linear zigzag structure as well as a circular polygon structure. Different from the systems studied by Lin et al.16 shared components are overlapped between adjacent subsystems, and could be different for distinct adjacent subsystems. Of course, these two systems refer to the linear zigzag structure and the circular polygon structure when . There are many situations in which adjacent subsystems share some components. For example, in some base station applications, we can deploy shared base stations, which can receive signals from base stations in adjacent areas to transmit signals successfully.6 Another example is the railway system. The shared components are railway platforms where railroad tracks enter and exit the station. Moreover, in real-life applications, there are such systems, for example, the highway system (street lights at intersections can be seen as shared components), the fire monitoring system,16 and so on. Some systems with shared components can maximize resource utilization and reduce cost.
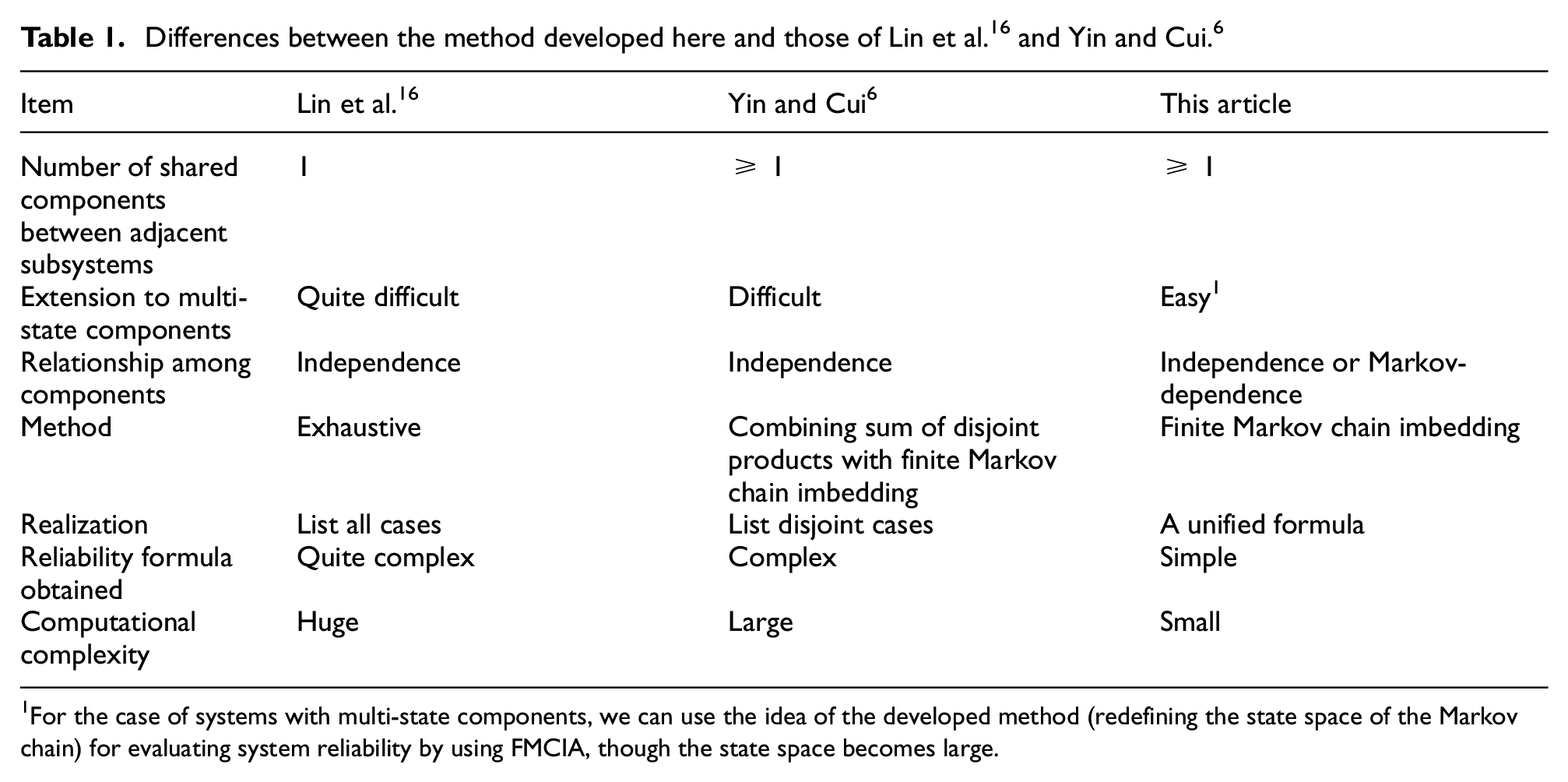
In this work, we present a simpler and more efficient method for the computation of the reliability functions of linear and circular systems studied by Yin and Cui.6 The differences between the method developed here and those of Lin et al.16 and Yin and Cui6 are listed in Table 1.
Differences between the method developed here and those of Lin et al.16 and Yin and Cui.6
Combining sum of disjoint products with finite Markov chain imbedding
Finite Markov chain imbedding
Realization
List all cases
List disjoint cases
A unified formula
Reliability formula obtained
Quite complex
Complex
Simple
Computational complexity
Huge
Large
Small
1For the case of systems with multi-state components, we can use the idea of the developed method (redefining the state space of the Markov chain) for evaluating system reliability by using FMCIA, though the state space becomes large.
The main scientific contributions of this work to literature on reliability modeling and engineering practice are as follows:
The reliabilities of and systems, are derived by employing the finite Markov chain imbedding approach for statistically independent and Markov-dependent cases. These provide extensions of known results for the independent case given by Lin et al.16 and Yin and Cui6;
Unified and explicit reliability formulas are derived for the considered linear and circular systems by redefining the state space of the Markov chain, instead of listing all disjoint cases, which makes it to be computationally superior to exhaustive and sum of disjoint products methods;
The method developed here is simpler and more efficient than those of Lin et al.16 and Yin and Cui,6 which involve too many cases and the corresponding reliability formulas are far too complex;
The proposed method decreases the amount of computation for the considered linear and circular systems, and a computational complexity comparison is given with the methods of Lin et al.16 and Yin and Cui6;
The developed work is easy to extend to the case of systems with multi-state components, while the methods of Lin et al.16 and Yin and Cui6 can not.
The rest of this paper is organized as follows. In Section 2, we describe some preliminaries and the assumptions for and systems. In Section 3, we present Theorem 1 for the reliability of system by redefining the state space of the Markov chain, and it is also extended to the Markov-dependent case. In a similar manner, the reliability of system is obtained for independent and Markov-dependent cases through Theorem 2 in Section 4. Section 5 compares the computational complexity of the developed method with the methods of Yin and Cui6 and Lin et al.16 A case study of communication systems is presented in Section 6, and some numerical examples are also given to illustrate the proposed method, and to compare the results with the sum of disjoint products method of Yin and Cui.6 Finally, some conclusions and discussions are made in Section 7.
Preliminaries and model assumptions
Preliminaries
The FMCIA can be used for computing the reliability of a linear consecutive--out-of-: F system.23 Define a Markov chain , with a finite state space and state representing an absorbing state as it corresponds to the failure of the system, as
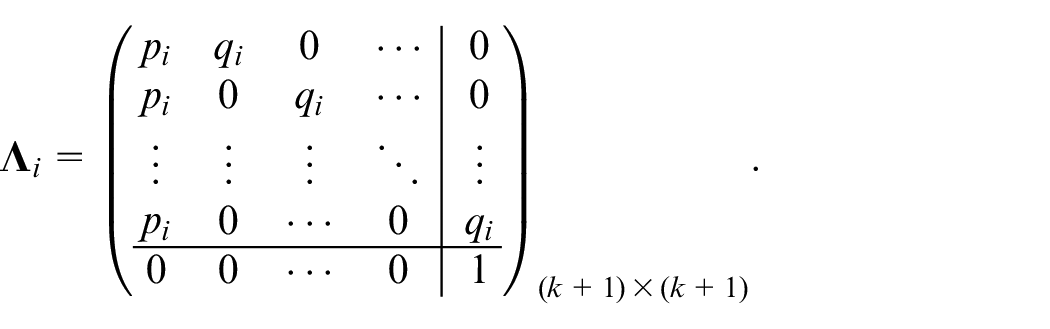
The FMCIA technique adds the components into the system one after another. In this manner, a finite Markov chain , with one-step transition probability matrix , can be built, where is the working probability of Component and is the failed probability of Component ,
The states are the working states of the system while state is the failed state. Then, the system reliability of a linear consecutive--out-of-: F system, considering the components to be independent, can be given by23 (Theorem 3.1)
where is the initial state probability distribution of the system, that is, all components are working to begin with, the function of is to add the probability values of the system in the working states, and is the transpose operator.
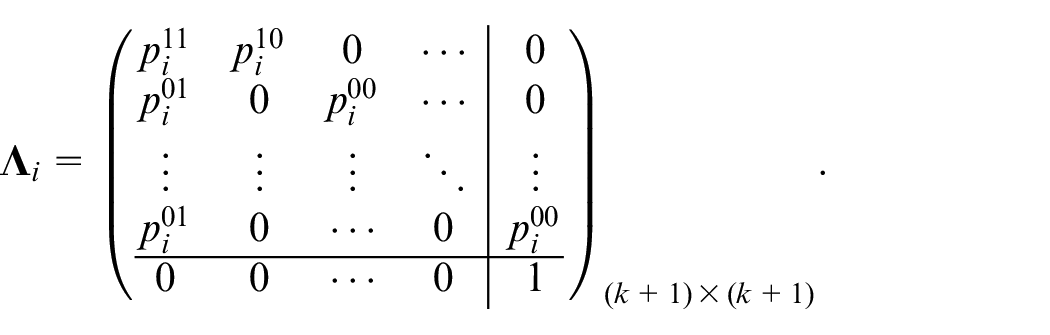
Under this set-up, the state probabilities of the components are independent of each other. If all components are Markov-dependent, that is, the conditional probabilities, with and , are
where corresponds to the state of the -th component and the initial probability is , we will have
Then, the one-step transition probability matrix can be built as
Similarly, the system reliability of a linear consecutive--out-of-: F system, considering the components to be Markov-dependent, can be calculated by (1).
Basic assumptions
In this section, linear and circular consecutive--out-of-: F systems with shared components, consisting of subsystems, are considered. For the purpose of describing these systems clearly, we now provide some basic assumptions:
A system consists of subsystems. Each subsystem is a linear consecutive--out-of-: F subsystem, for . The system is working if and only if all subsystems are working;
Two adjacent subsystems overlap with one or more shared components, while other components are referred to as separate components;
Each component has two states: working and failed states. The system also has two states, namely, working and failed states;
The state probabilities of components are statistically independent of each other, and Component works with probability , and fails with probability , or all components could be Markov-dependent. In other words, the probability of failure of a component depends on the state (working or failed) of the preceding component , but it does not depend on the states of other components. Then, the conditional probabilities, with and , are
The initial probability is and . If are equal for all , then it corresponds to the case of homogeneous Markov dependence;
(5) The number of shared components in each subsystem is less than the number of total components, and at least one shared component is included between adjacent subsystems.
We now introduce pertinent notations for the considered linear and circular systems to make the ensuring developments clear:
(1) For the linear consecutive--out-of-: F system with shared components:
• subsystems and overlap with shared components, for ;
• the shared components of subsystem 1 are numbered as , while the separate components are numbered as ;
• the shared components of subsystem , , are numbered as , , , and , while the separate components are numbered as ;
• the shared components of subsystem are numbered as , , , while the separate components are numbered as .
(2) For the circular consecutive--out-of-: F system with shared components:
• subsystems and overlap with shared components, for , while subsystems and 1 overlap with shared components;
• the shared components of subsystem 1 are numbered as , , and , while the separate components are numbered as ;
• the shared components of subsystem , , are numbered as , , , and , while the separate components are numbered as ;
• the shared components of subsystem are numbered as , , , and , , , while the separate components are numbered as .
Reliability of linear consecutive-k-out-of-n: F system with shared components
Each subsystem is a consecutive--out-of-: F subsystem, for , and two adjacent subsystems overlap with one or more shared components. Consequently, shared components influence the working probability of both adjacent subsystems. We concern about the number of consecutive failed components in each subsystem.
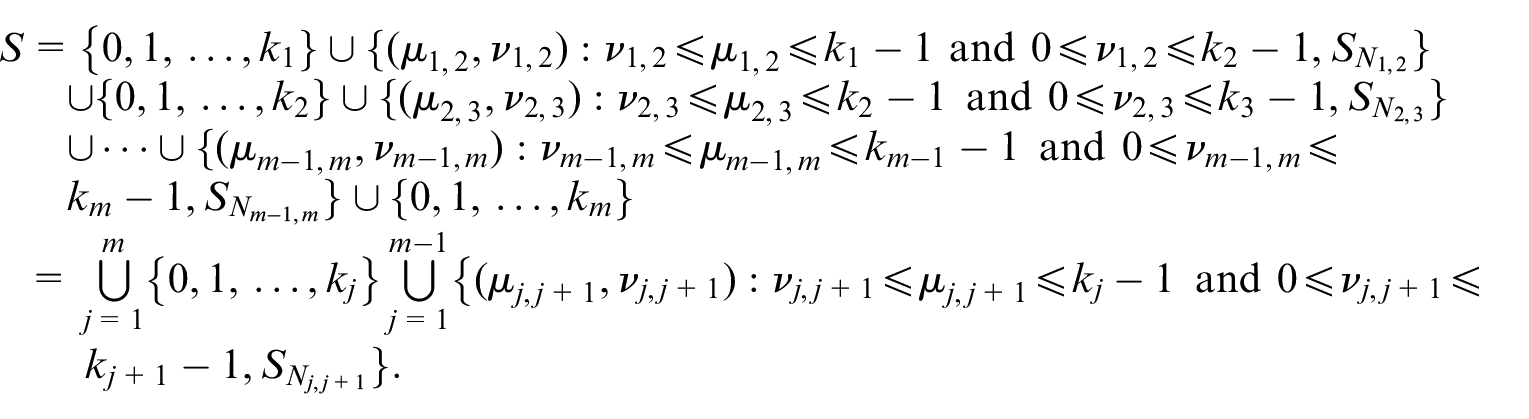
For the individual area of subsystem , we only need to count the number of consecutive failed components of this subsystem, for . For the common area between subsystems and , we need to count the numbers of consecutive failed components of both subsystems, respectively, for . For this purpose, we define a Markov chain with a finite state space
For the individual area of subsystem , for , states represent the working states and state represents the failed state. For the common area between subsystems and , for , denotes a working state in which subsystem with components () has failed the last components, subsystem with components () has failed the last components and denotes the state in which subsystem or subsystem fails. We can view as a joint state of failed sub-states while either or . Thus, is the absorbing state set of the system because the system works if and only if all the subsystems are working.
Re-label state , with and , as state , for . Assuming , we regard
state as state , state as state , , state as state ;
state as state state as state , , state as state ;
⋮
state as state , state as state , , state as state .
Then, there are states.
Based on the above definition of the state space of the Markov chain, a unified formula for evaluating the linear system reliability can be presented in the following Theorem.
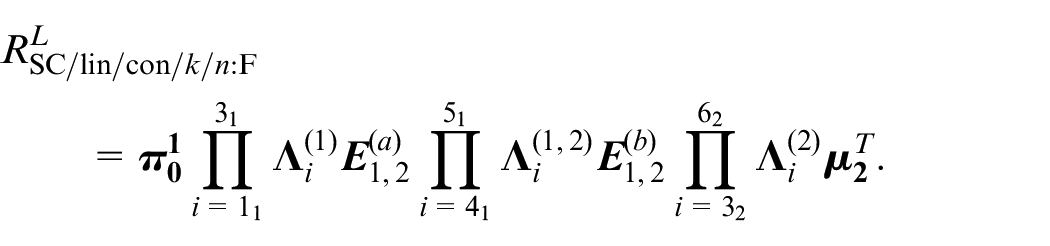
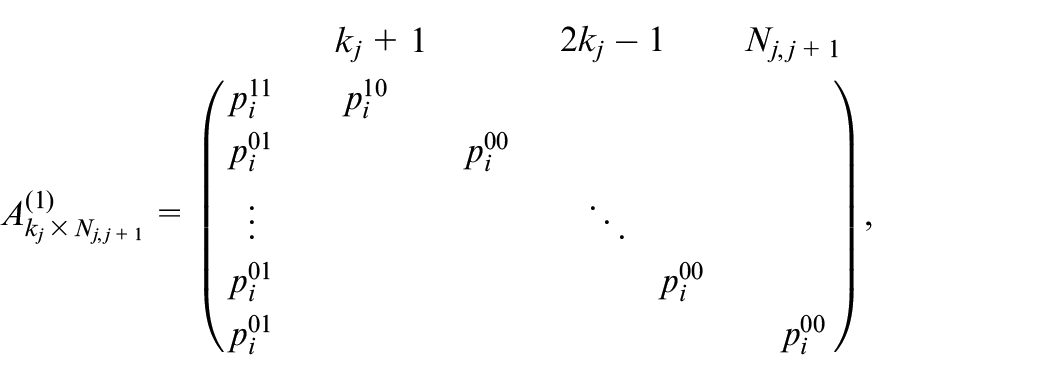
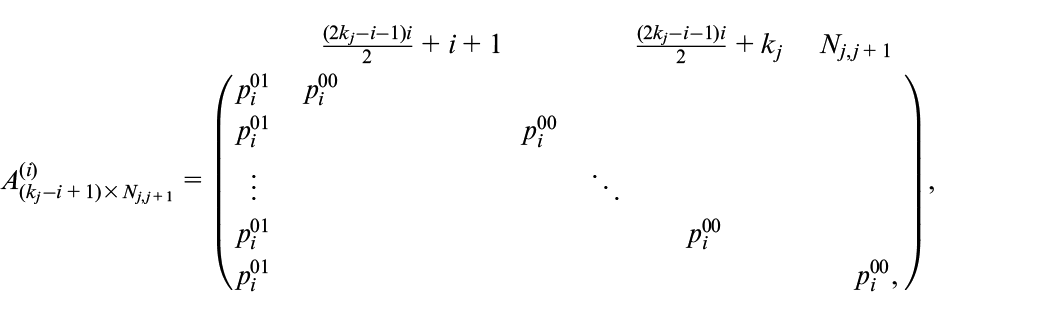
Theorem 1.The system reliability of the system, is given by
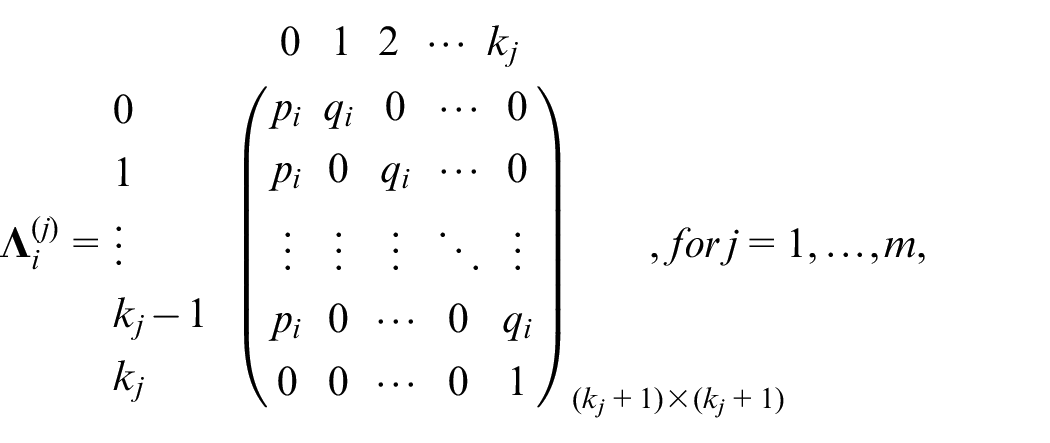
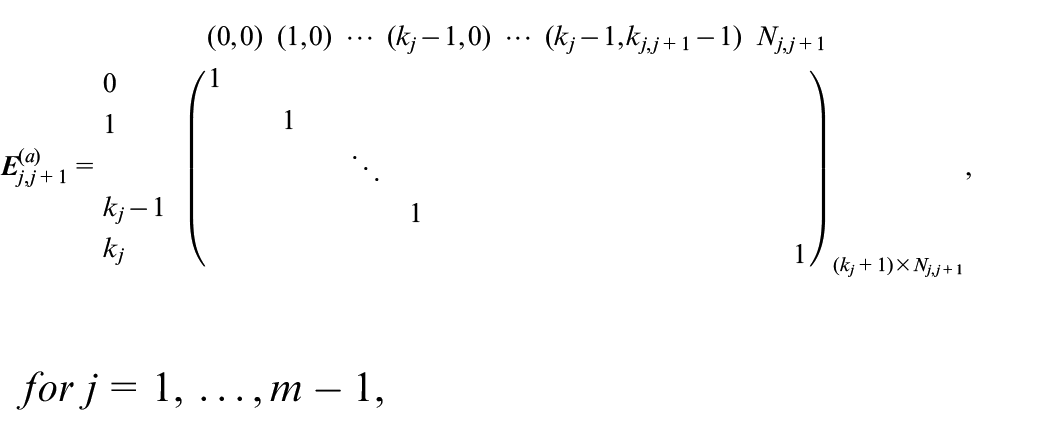
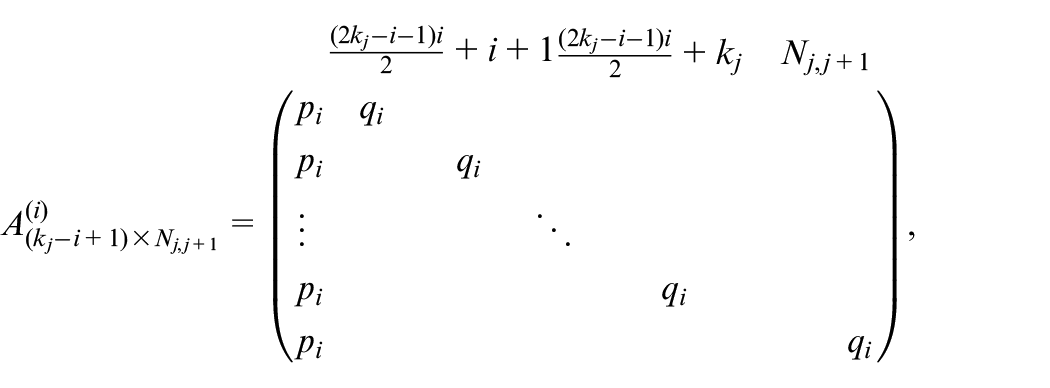
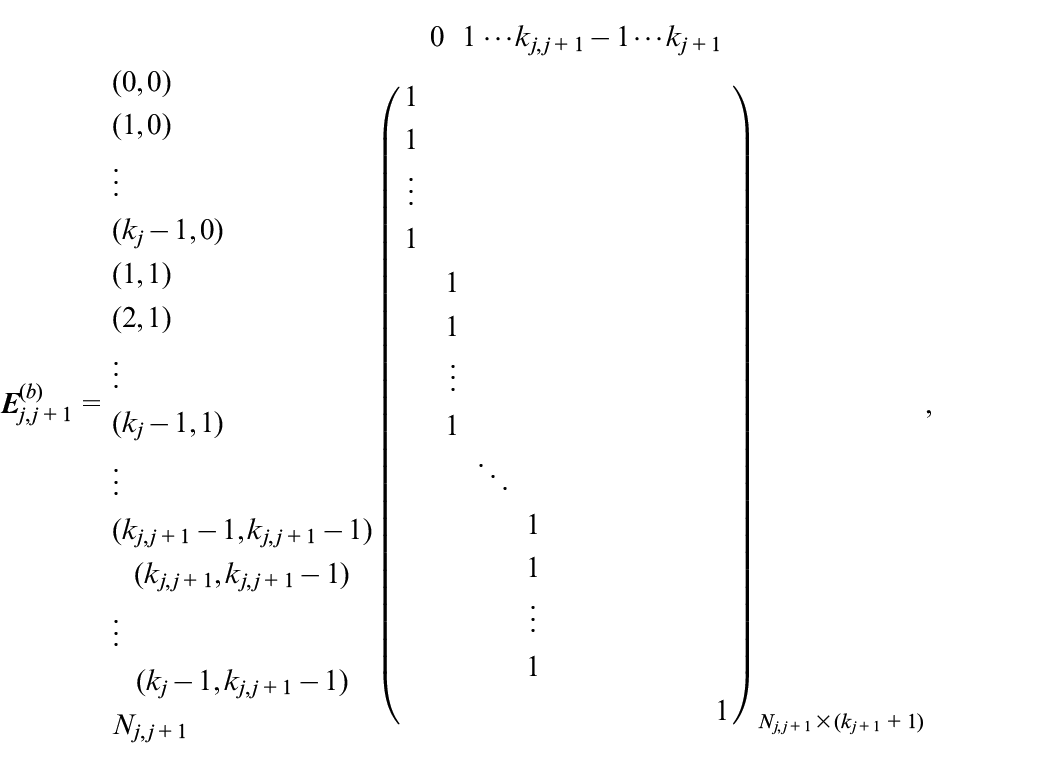
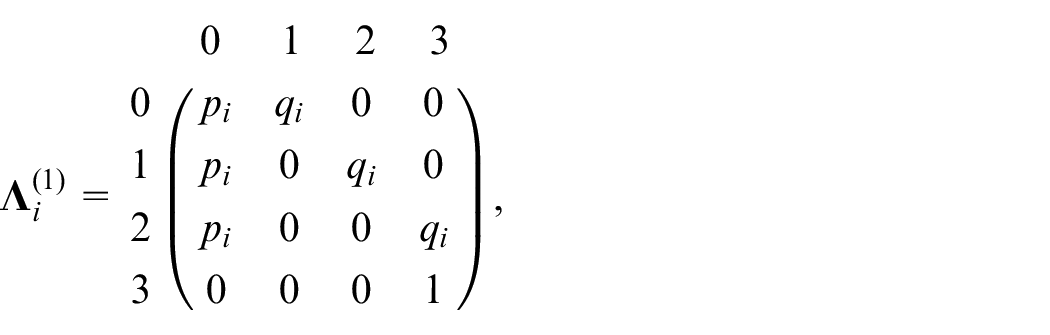
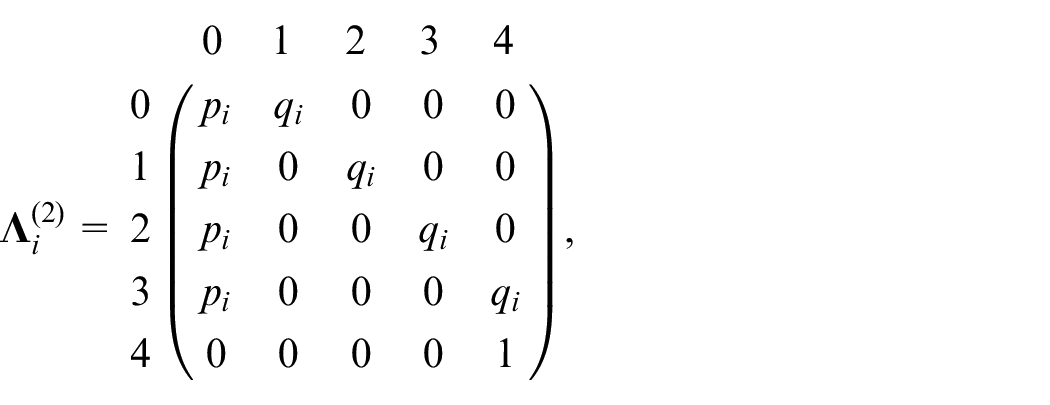
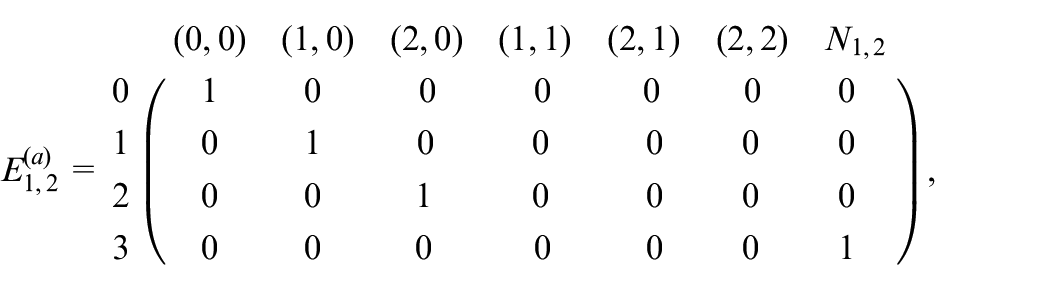
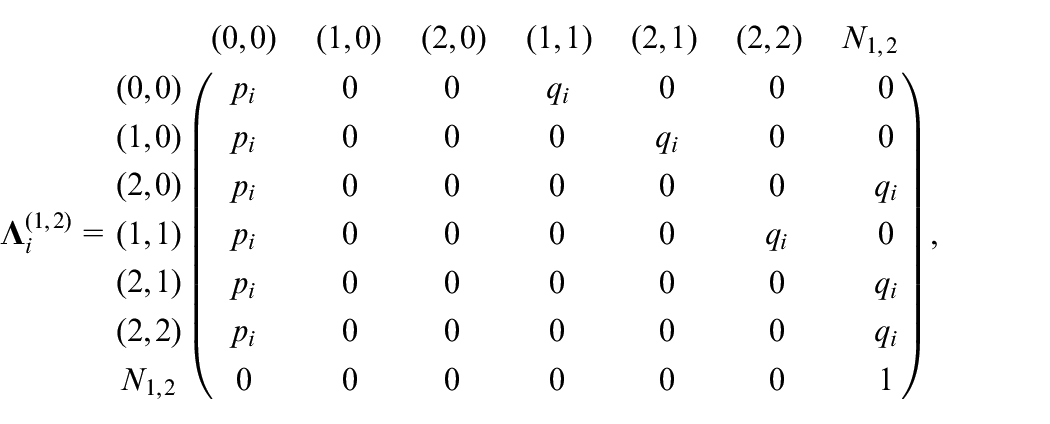
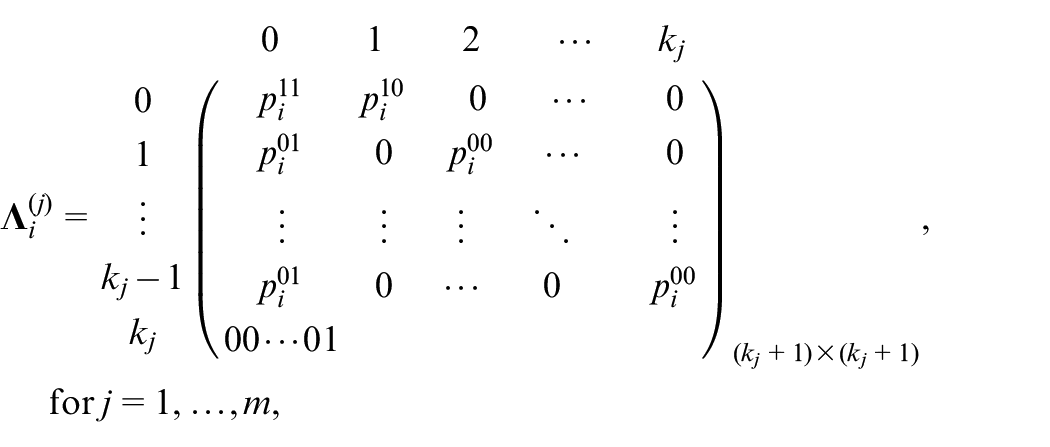
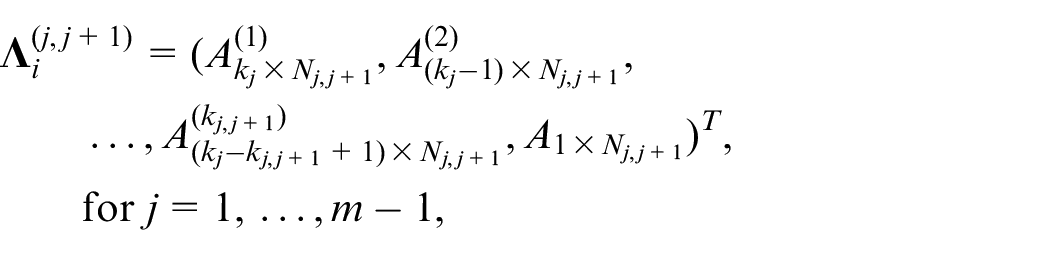
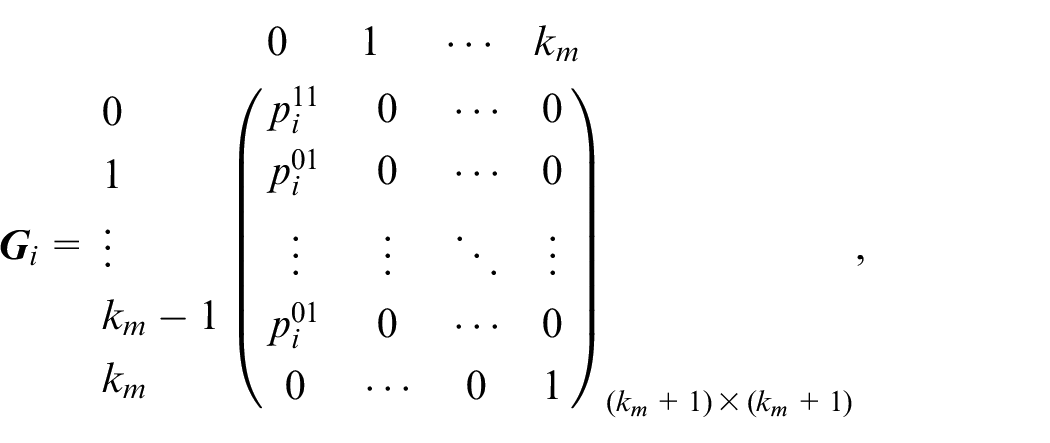
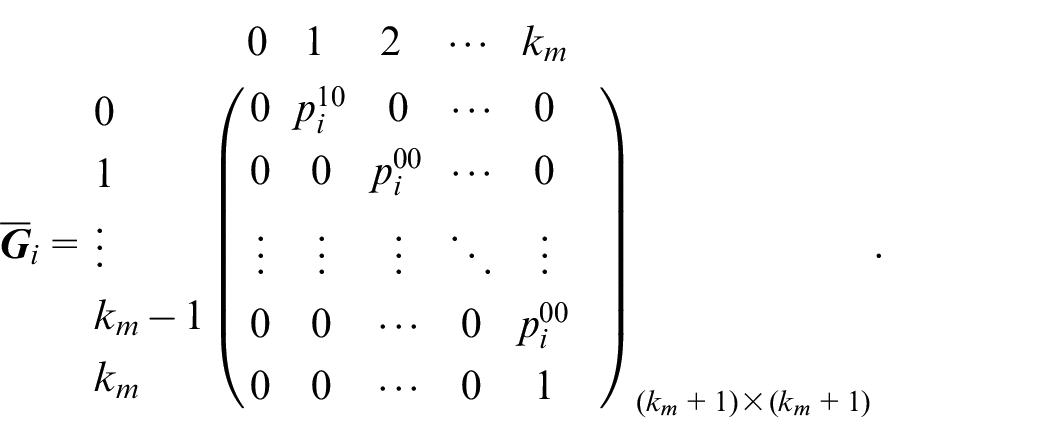
where,
forand,
for, and. We use the convention that if , and the blank spaces of the above matrices are 0.
Proof. As shared components influence the working of both adjacent subsystems, for the common area between subsystems and , we need to count the numbers of consecutive failed components in both subsystems, for . For this reason, the function of matrix is to change the state space of individual area to the state space of common area and the role of matrix is to change the state space of common area to the state space of individual area. The matrix is the one-step transition probability matrix for the individual area of subsystem and matrix is the one-step transition probability matrix for the common area between subsystems and . Also, is the initial state probability distribution of the system, is to add the probability values of the system working, and denotes the transpose operator. The proof thus gets completed.
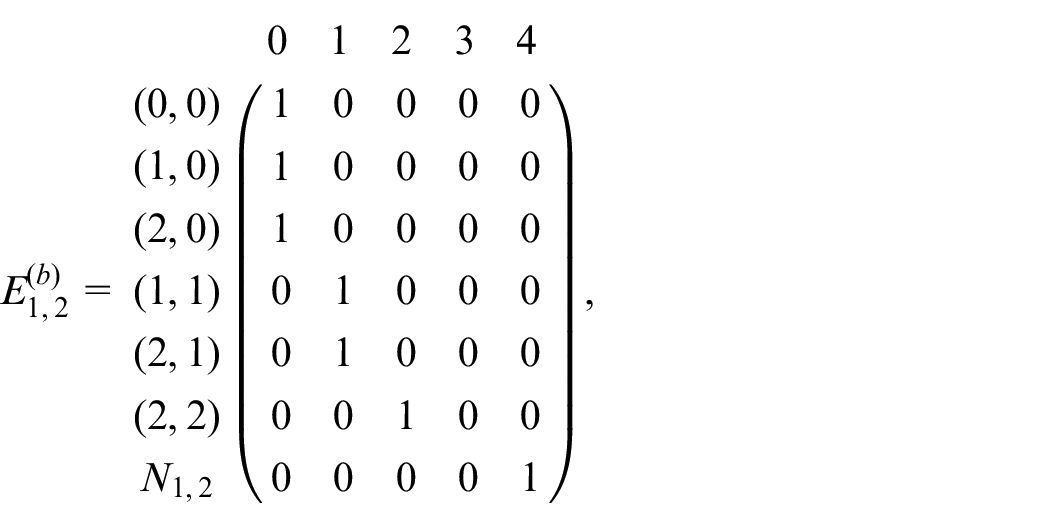
To demonstrate how one could use the developed FMCIA method, we now present a simple example. Consider a linear system consisting of two subsystems. Subsystem 1 is a linear consecutive-3-out-of-5: F subsystem (i.e. = 5, = 3) while subsystem 2 is a linear consecutive-4-out-of-6: F subsystem (i.e. = 6, = 4). We set the number of shared components between subsystems 1 and 2 as 2 (i.e. ). Then, according to Theorem 1, we have ,
and . We thus derive the reliability of the given linear system to be
Markov-dependent case
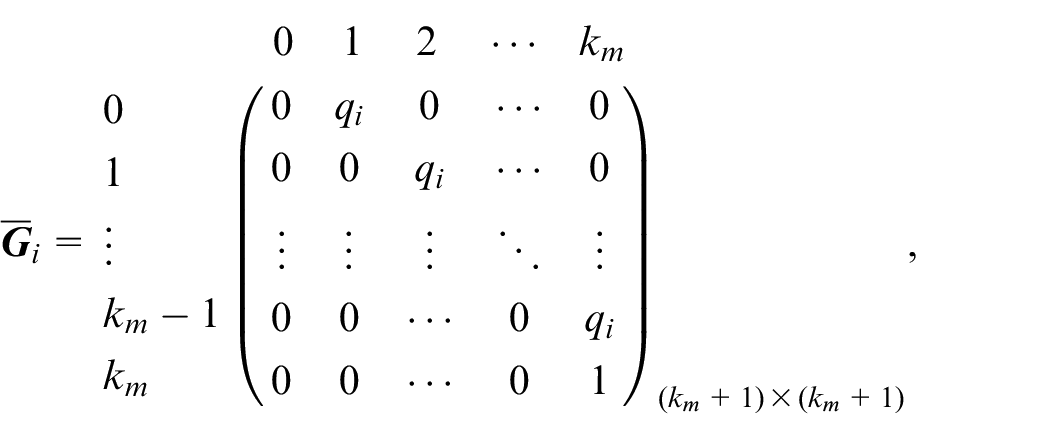
The method developed above can be easily adapted to obtain system reliability for Markov-dependent case. If all the components are Markov-dependent, then we have . In this case,
for and . Other settings are the same as in Theorem 1. The blank spaces of the above matrices are 0. Therefore, with the components being Markov-dependent, the reliability of the linear system can then be calculated by using (2).
Reliability of circular consecutive-k-out-of-n: F system with shared components
For a circular consecutive--out-of-: F system with shared components, we can decompose the circular system from the common area between subsystems and 1, and then the structure of the system will turn into a linear structure.
Assume , and that shared components are overlapped between subsystems and 1. If , consider the case of exactly consecutive failed components starting from Component (i.e. Component ) when , for . For example, Component is working, Component is failed and Components with unknown states if . In this case, subsystem will fail if consecutive components of the unknown remaining shared components between subsystems and 1 break down, failing the whole system because , and this is reflected in the calculation of reliability value of subsystem . Therefore, if , the reliability of the circular system can be obtained when , as
where ,
if and other settings are the same as in Theorem 1.
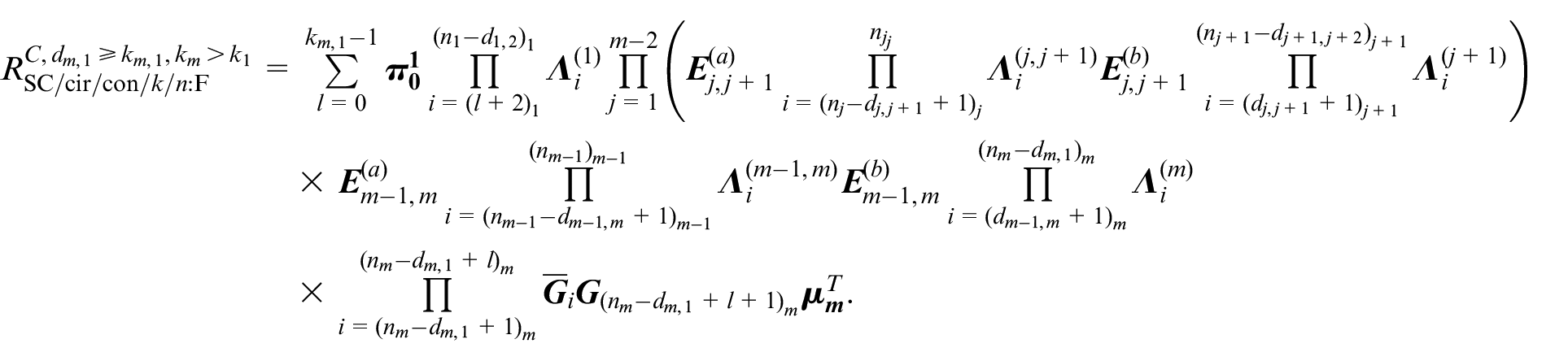
Consider the case of exactly consecutive failed components starting from Component (i.e. Component ) when , for . Then, if , the reliability of the circular system can be obtained, when , as
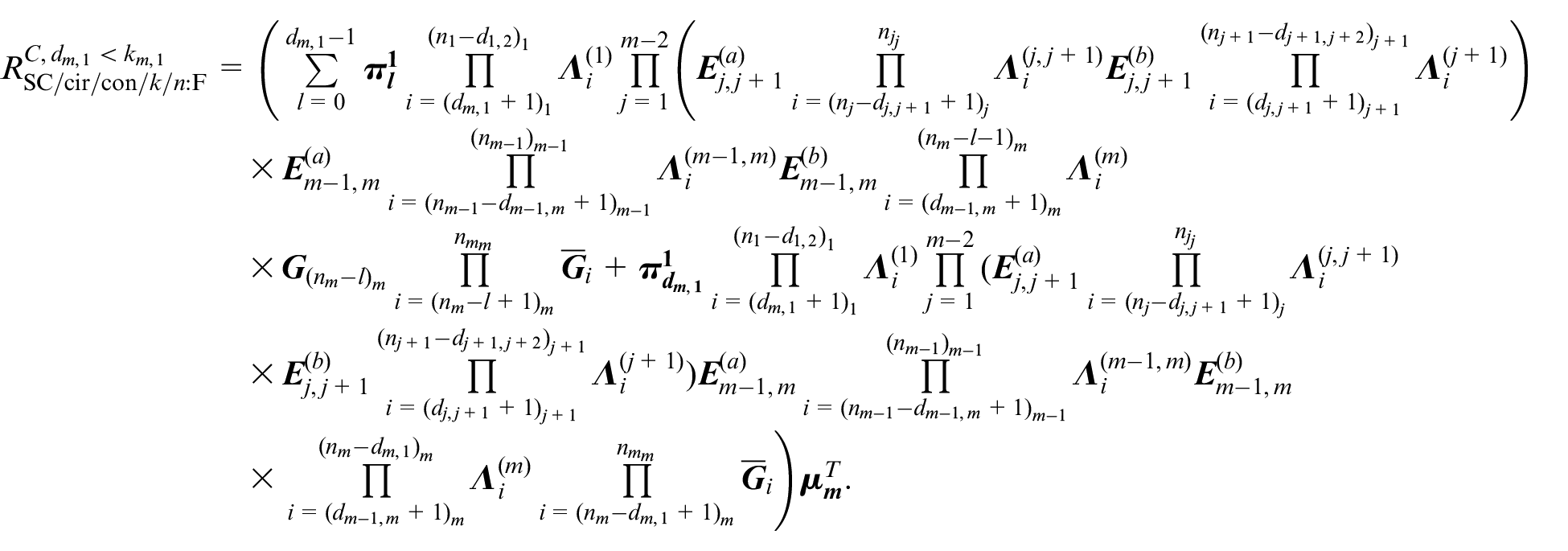
If , consider the case of exactly consecutive failed components starting from Component , for . The reliability of the circular system can be obtained, when , as
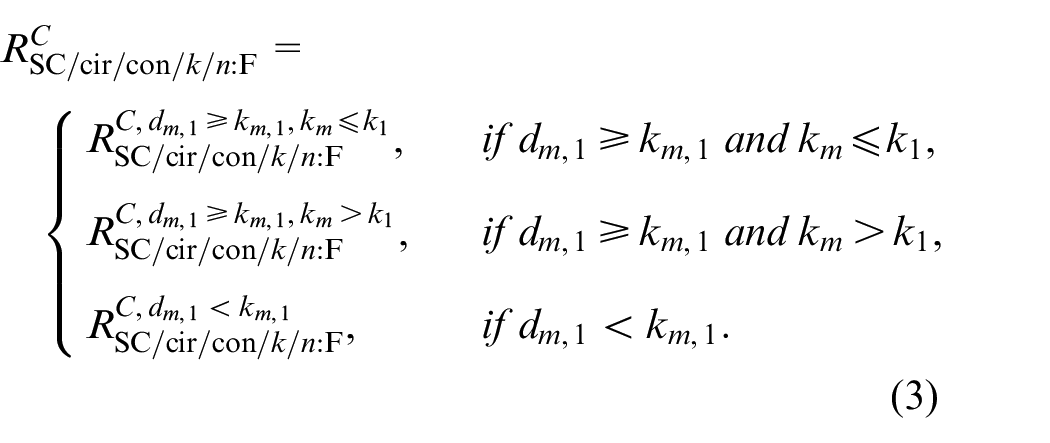
Based on all the above cases and corresponding expressions, a unified formula for the circular system reliability can be obtained as follows.
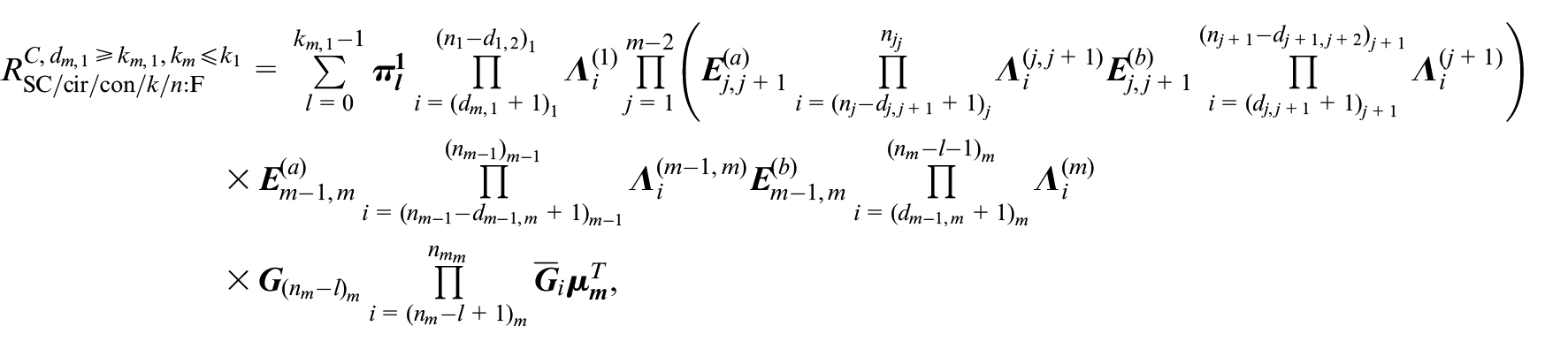
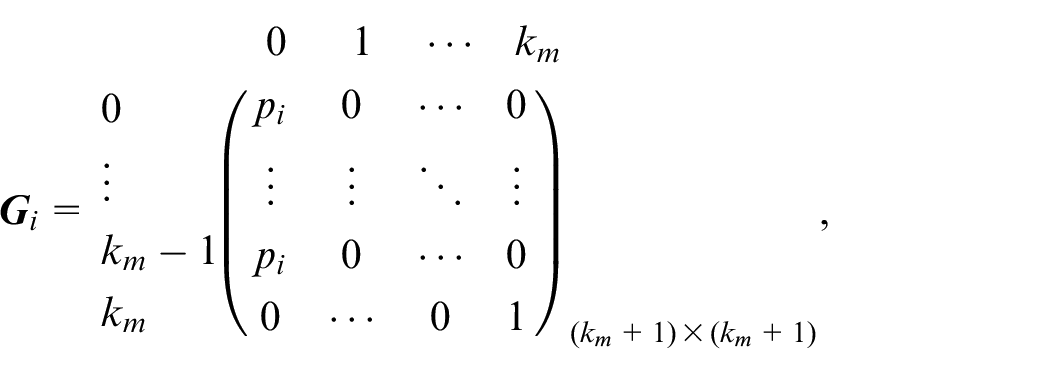
Theorem 2.The system reliability of the system, is given by
Proof. It is similar to that of Theorem 1, and is therefore omitted for the sake of brevity.
Markov-dependent case
If all the components are Markov-dependent, we have . In this case,
Other settings are the same as in the Markov-dependent case of the linear system in Section 3. Thence, in this case, when the components are Markov-dependent, the reliability of circular system can be calculated from (3).
Comparison of computational complexity
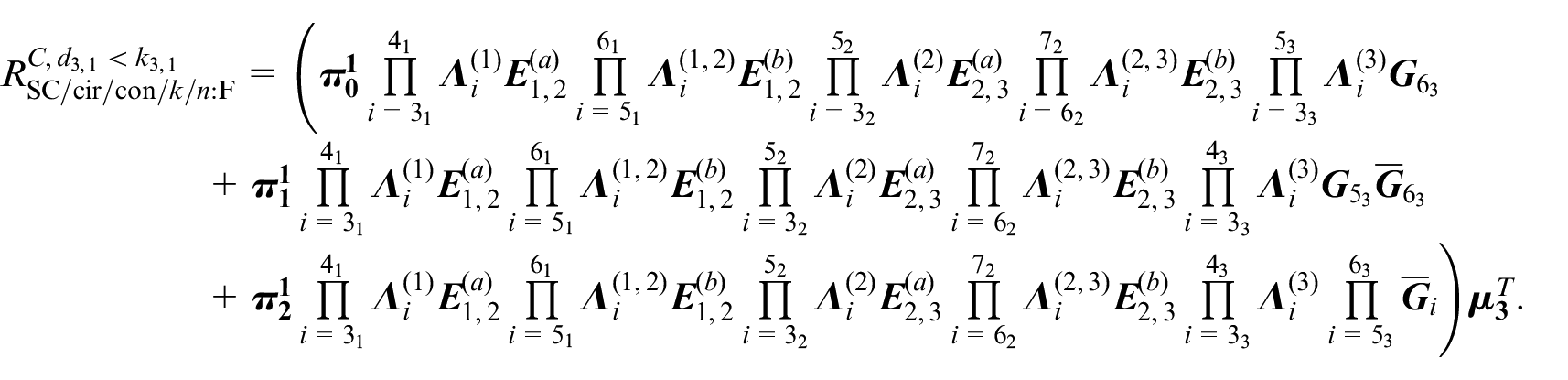
For the proposed method, the computational complexity is mostly in the calculation of matrix multiplication. The system reliability formula for the system, is given by
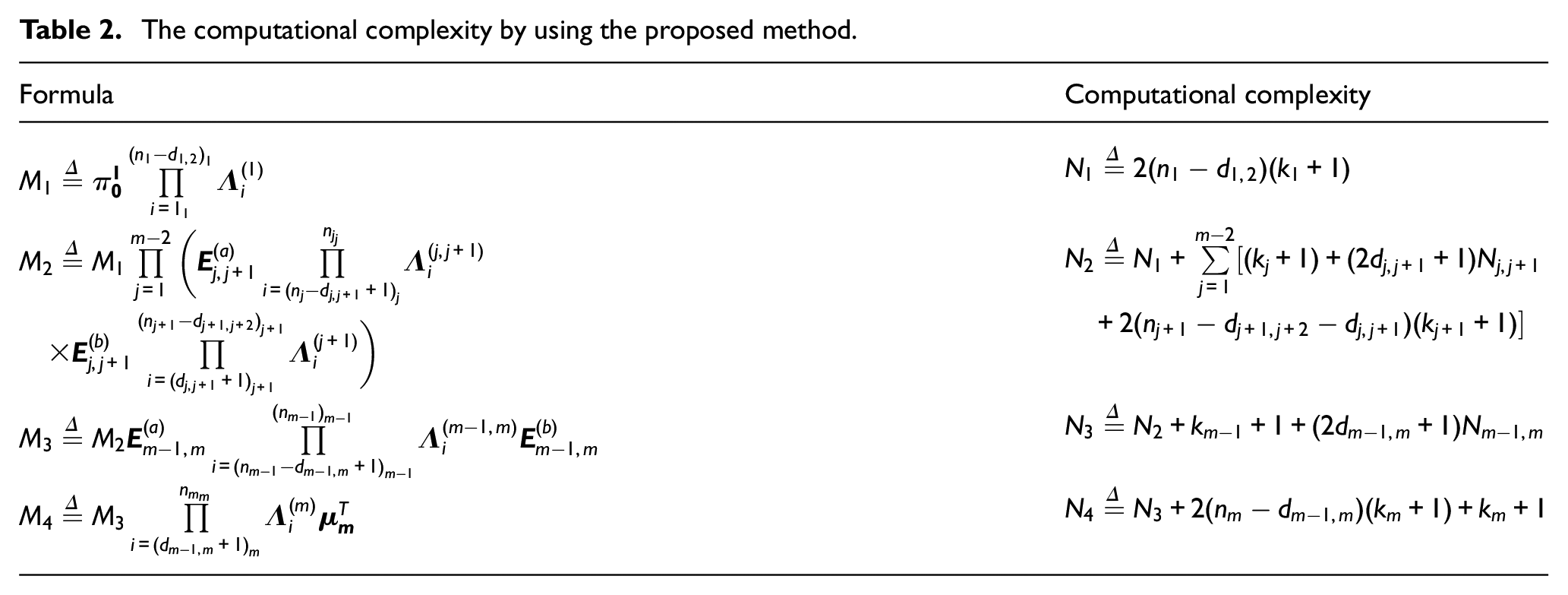
The number of multiplication calculations is taken into consideration in the above equation. We now present the computational complexity of the above formula in Table 2.
The computational complexity by using the proposed method.
Formula
Computational complexity
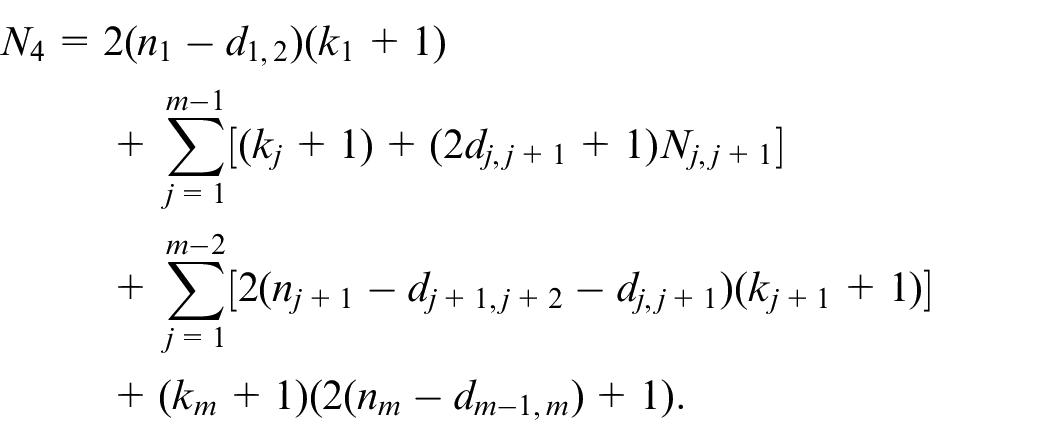
Hence, the total number of calculations for multiplication involved in the reliability formula of the system, is
The number of calculations for multiplication is obtained by considering the special structure (sparse) of matrices , for , and , and , for .
Yin and Cui6 gave a rough evaluation of the number of calculations for multiplication of the above linear system when the matrices are sparse, as
where
Though the above formula is not an accurate calculation of the complexity of the linear system, it can be used as a reference. However, the computational complexity of actual problems cannot be expressed in a unified formula as it is related to the size relationship between and .
Using the proposed method, the increase in calculation due to the addition of the state change matrices and , and the dimensions of matrices becoming larger in the common area, is given by . But, in the method of Yin and Cui,6 the increased computation is due to having disjoint cases. So, we have and can then be approximated as . Evidently, the method developed here decreases the complexity of computation for system reliability significantly as compared to the methods of Yin and Cui6 and Lin et al.,16 especially for large system. Lin et al.16 employed the exhaustive method for computing the system reliability, and so has a larger computational time than the sum of disjoint products method of Yin and Cui.6
Case study of communication systems
Here, a case study of communication systems is detailed in order to illustrate the developed model and the formulas. Communication systems are made up of base stations, which are wireless modems responsible for receiving and transmitting mobile signals. Such a base station has the following characteristics:
A base station performs its function within the cover range if the base station is working;
The area turns a “blind spot” to a base station causing a signal interruption if a base station breaks down.
Redundant base station arrangements are commonly adopted to improve the probability of transmitting mobile communication signals successfully, leading to overlapped cover ranges among different base stations. In this case, the adjacent redundant base stations can assist in the transmission of signals even though a base station has failed.
In some applications, deploying different kinds of base stations such as micro base stations, macro base stations, remote radio, and so on is considered, to get signal transmission accomplished because different kinds of base stations send and receive distinct frequencies and wavelengths. Due to area range, population number, location of the base station, environment, and so on, different areas may deploy different kinds of base stations. For example, suppose areas E and F, and areas F and G could not communicate directly as they make use of different kinds of base stations. So, to transmit signals from area E to area F, and area E to area G successfully, we need to deploy some shared base stations, receiving signals from base stations of the former area and sending signals to base stations of the latter area. According to the above communication system, within area E, it could be treated as a consecutive--out-of-: F subsystem; within area F, it could be treated as a consecutive--out-of-: F subsystem; and within area G, it could be treated as a consecutive--out-of-: F subsystem. We then set base stations in areas E and F to be shared and base stations in areas F and G to be shared.
Next, for the purpose of illustrating the proposed method, and comparing it with the sum of disjoint products method of Yin and Cui,6 we present several numerical examples. For the Markov-dependent case, we omit the numerical results for the sake of conciseness.
Numerical Example1: Assume the system is composed of three subsystems. Subsystem 1 is a consecutive-2-out-of-6: F subsystem (i.e. = 6, = 2); subsystem 2 is a consecutive-4-out-of-7: F subsystem (i.e. = 7, = 4); and subsystem 3 is a consecutive-5-out-of-8: F subsystem (i.e. = 8, = 5). Suppose the number of shared components between adjacent subsystems is and for the linear system and , and for the circular system.
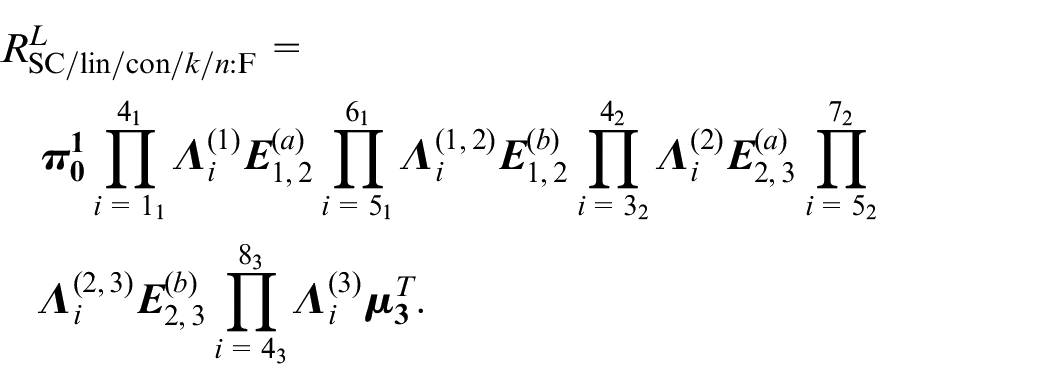
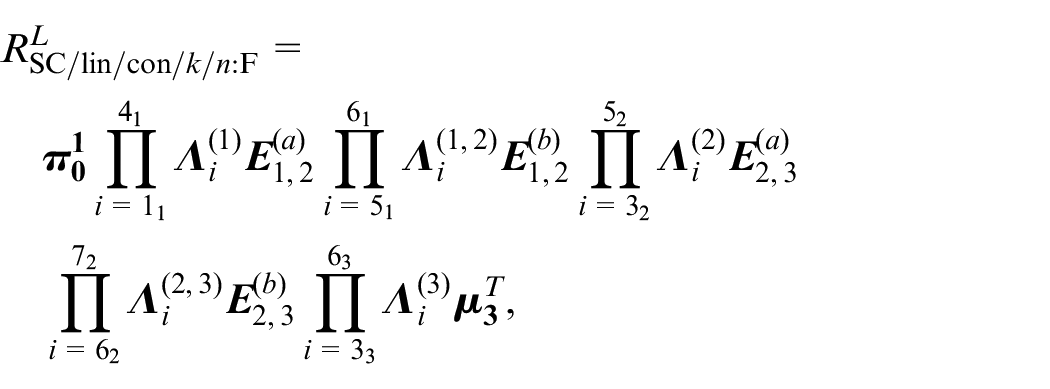
Then, based on Theorem 1, the reliability of the above linear system is given by
Based on Theorem 2, the reliability of the above circular system is given by
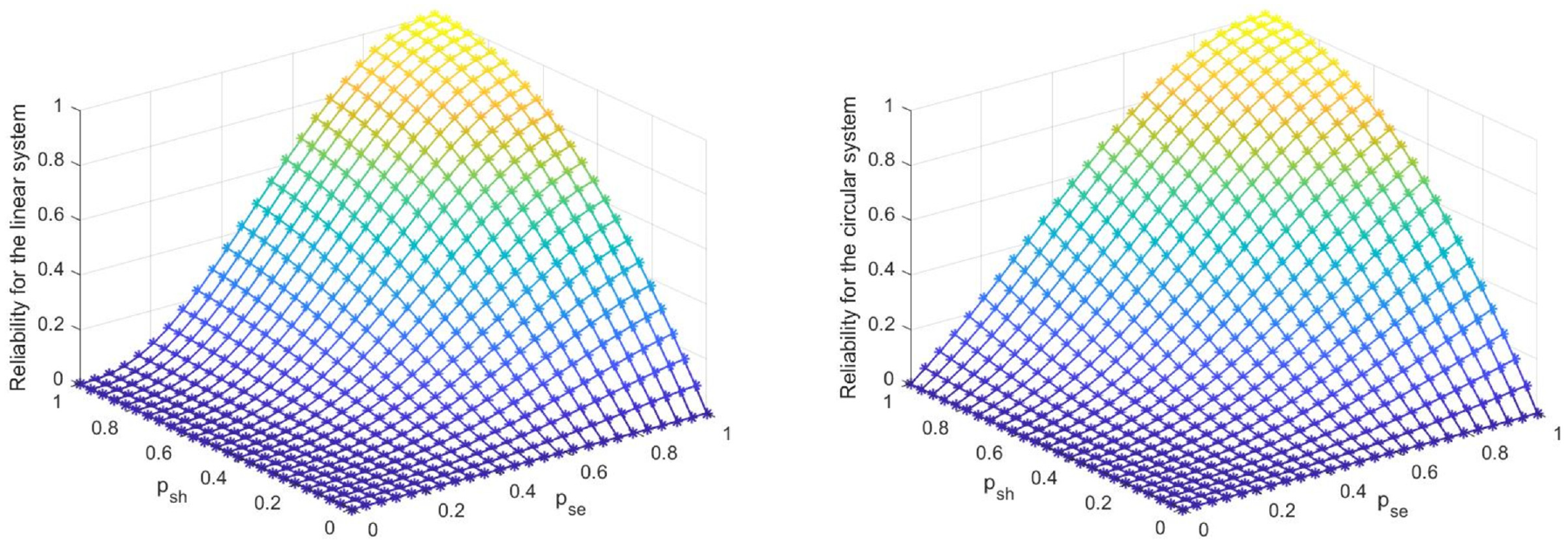
We now consider the working probabilities of all separate components to be and the working probabilities of all shared components to be . Then, the reliabilities of the linear and circular systems were computed with the use of the above formulas and are as shown in Figure 1.
Reliability curves for the linear and circular systems with identical shared components and separate components.
In Figure 1, we can observe that the reliabilities of both systems increase with an increase in (given ) or (given ). Moreover, the reliabilities of both systems are 1 when we take the working probabilities of all components to be 1. The reliabilities of both systems are 0 when all separate components or all shared components fail, and this is because there are at least two consecutive () failed components in subsystem 1 under this circumstance, failing the system. These observations are intuitive.
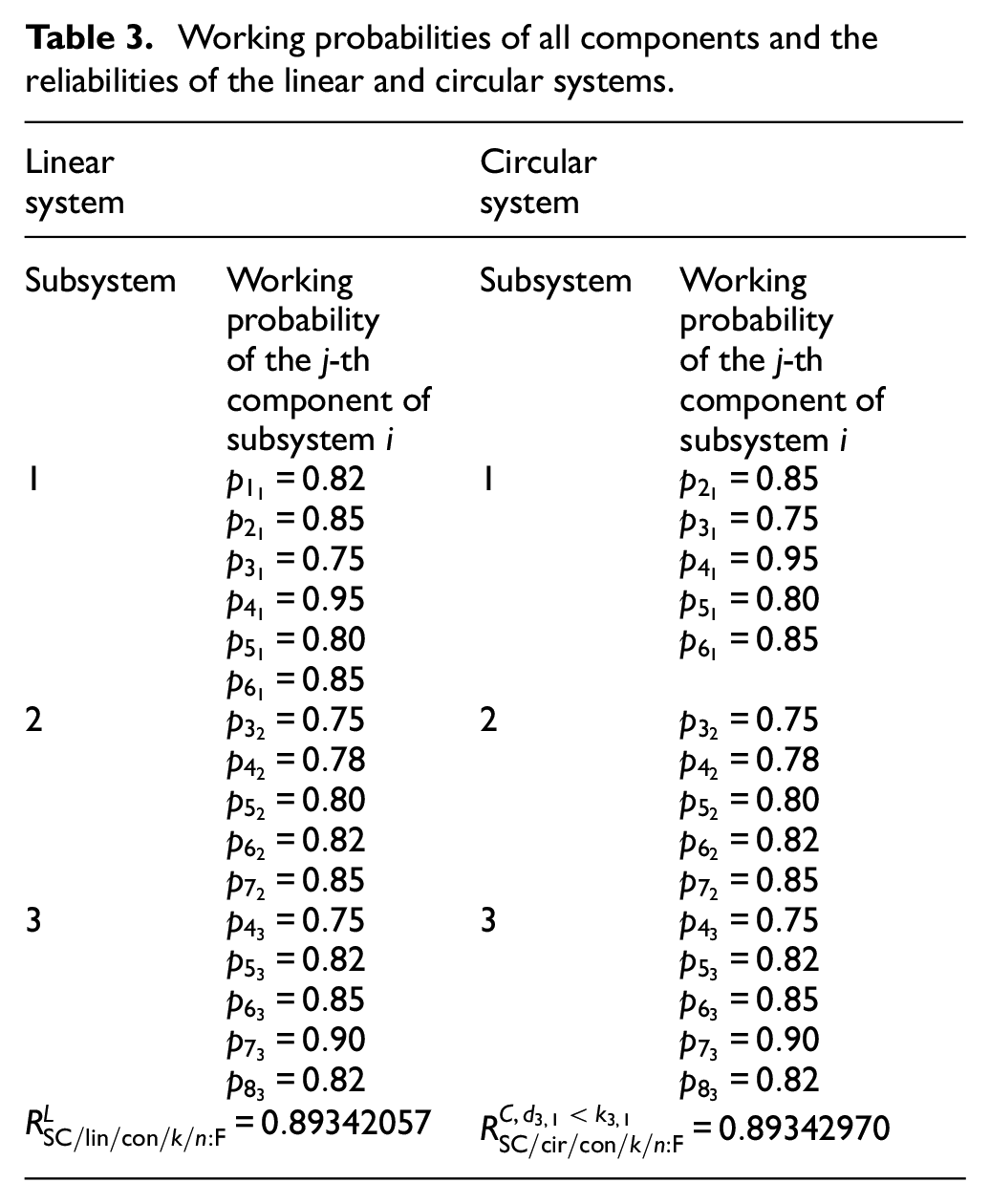
Next, nonidentical separate and shared components for calculating the reliabilities of the linear and circular systems are considered, and for this purpose, let denote the working probability of the -th component of subsystem . Then, Table 3 presents the working probabilities of all components and the reliabilities of the linear and circular systems.
Working probabilities of all components and the reliabilities of the linear and circular systems.
Linear system
Circular system
Subsystem
Working probability of the -th component of subsystem
Subsystem
Working probability of the -th component of subsystem
1
1
2
2
3
3
Numerical Example 2: The settings of this example are the same as in the example of Yin and Cui.6 Assume the system is composed of three subsystems. Subsystem 1 is a consecutive-3-out-of-6: F subsystem (i.e. = 6, = 3); subsystem 2 is a consecutive-4-out-of-7: F subsystem (i.e. = 7, = 4); and subsystem 3 is a consecutive-4-out-of-6: F subsystem (i.e. = 6, = 4). We set the same number of shared components between adjacent subsystems for both systems as for the linear system and for the circular system.
Then, based on Theorem 1, the reliability of the above linear system is given by
and based on Theorem 2, the reliability of the above circular system is given by
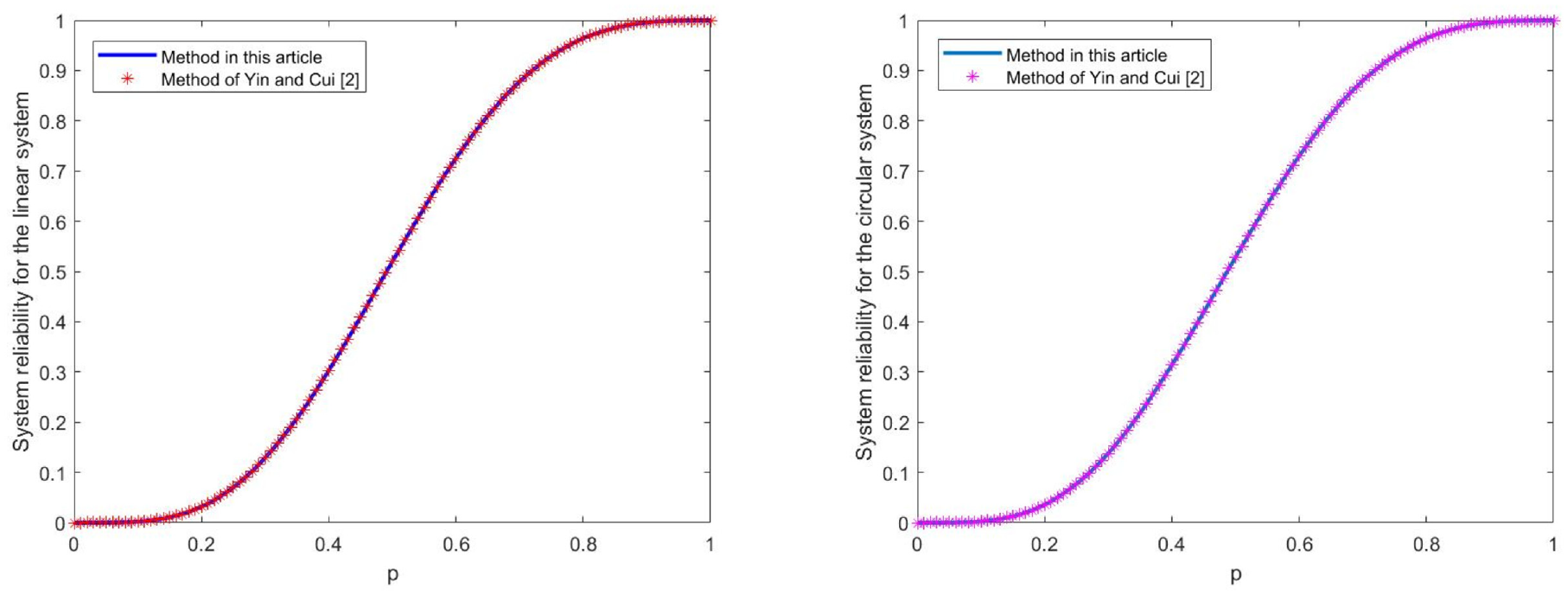
Assume all the components are identical with working probability . Then, the reliabilities of the linear and the circular systems were computed using the method developed here as well as by the method of Yin and Cui.6 These results are plotted in Figure 2. Both methods yield the same values for reliability curves.
Reliability curves computed by the proposed method and that of Yin and Cui.6
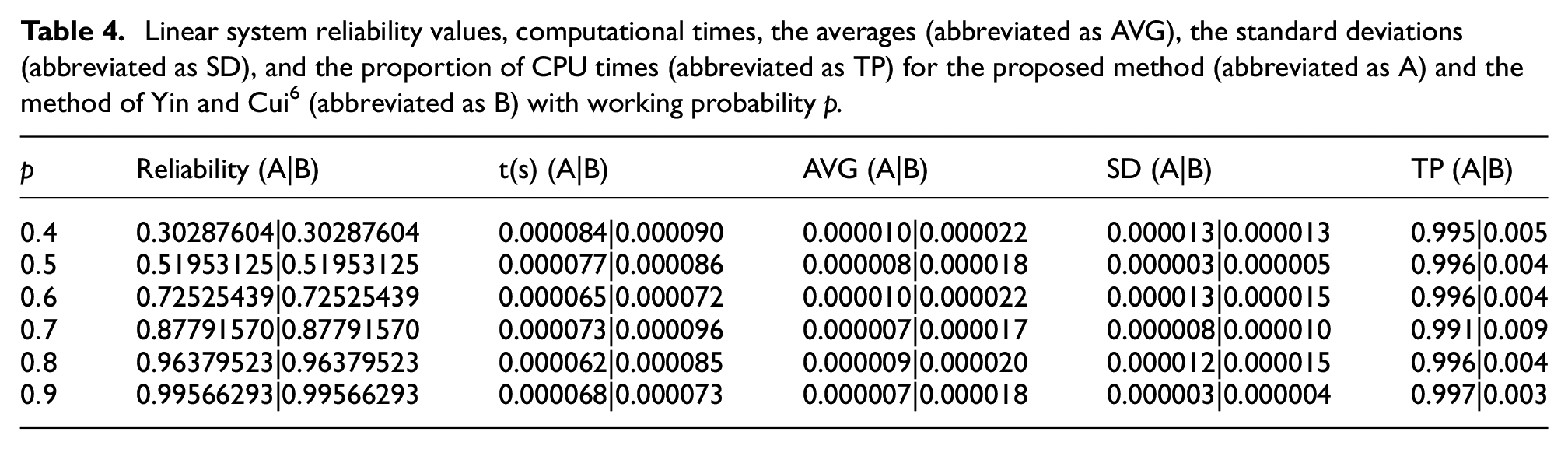
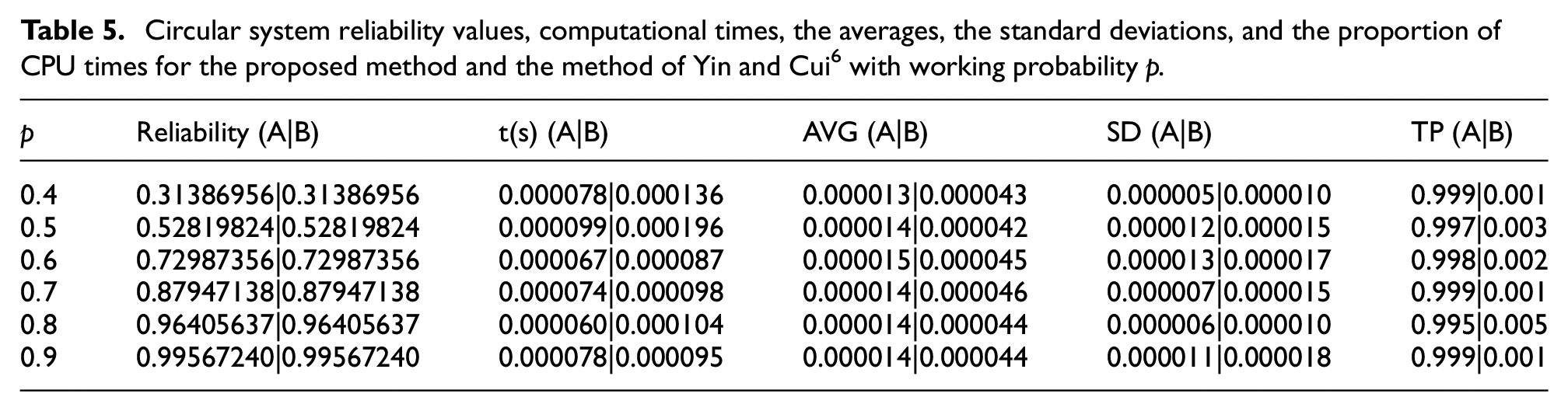
Moreover, in Tables 4 and 5, we present the reliability values and the computational times for the two methods for the above linear and circular systems given different working probability . And we repeat the calculation 1000 times, then the averages, the standard deviations, and the proportion of CPU times (i.e. the proposed method has shorter CPU times out of these times than the method of Yin and Cui6) are provided as well.
Linear system reliability values, computational times, the averages (abbreviated as AVG), the standard deviations (abbreviated as SD), and the proportion of CPU times (abbreviated as TP) for the proposed method (abbreviated as A) and the method of Yin and Cui6 (abbreviated as B) with working probability .
Reliability (A|B)
t(s) (A|B)
AVG (A|B)
SD (A|B)
TP (A|B)
0.30287604|0.30287604
0.000084|0.000090
0.000010|0.000022
0.000013|0.000013
0.995|0.005
0.51953125|0.51953125
0.000077|0.000086
0.000008|0.000018
0.000003|0.000005
0.996|0.004
0.72525439|0.72525439
0.000065|0.000072
0.000010|0.000022
0.000013|0.000015
0.996|0.004
0.87791570|0.87791570
0.000073|0.000096
0.000007|0.000017
0.000008|0.000010
0.991|0.009
0.96379523|0.96379523
0.000062|0.000085
0.000009|0.000020
0.000012|0.000015
0.996|0.004
0.99566293|0.99566293
0.000068|0.000073
0.000007|0.000018
0.000003|0.000004
0.997|0.003
Circular system reliability values, computational times, the averages, the standard deviations, and the proportion of CPU times for the proposed method and the method of Yin and Cui6 with working probability .
Reliability (A|B)
t(s) (A|B)
AVG (A|B)
SD (A|B)
TP (A|B)
0.31386956|0.31386956
0.000078|0.000136
0.000013|0.000043
0.000005|0.000010
0.999|0.001
0.52819824|0.52819824
0.000099|0.000196
0.000014|0.000042
0.000012|0.000015
0.997|0.003
0.72987356|0.72987356
0.000067|0.000087
0.000015|0.000045
0.000013|0.000017
0.998|0.002
0.87947138|0.87947138
0.000074|0.000098
0.000014|0.000046
0.000007|0.000015
0.999|0.001
0.96405637|0.96405637
0.000060|0.000104
0.000014|0.000044
0.000006|0.000010
0.995|0.005
0.99567240|0.99567240
0.000078|0.000095
0.000014|0.000044
0.000011|0.000018
0.999|0.001
From Tables 4 and 5, we observe that the results from the two methods are the same. However, the comparison of computational complexity has been discussed earlier in Section 5, and the proposed method is better than the method of Yin and Cui6 in terms of CPU time. Though the computational time is not high here as the small systems we have considered here are of small sizes, the proposed method would become considerably more effective for reliability calculations of large systems.
Conclusions and discussion
In this work, we have presented a simpler and more efficient method for the computation of the reliability function of and systems. We have derived unified and explicit reliability formulas, which are better than the exhaustive and sum of disjoint products methods. The proposed method can also be readily used to obtain reliability formulas for Markov-dependent cases, which provide extensions of known results of Lin et al.16 and Yin and Cui.6 The proposed method reduces the computational complexity for system reliability significantly as compared to the methods of Yin and Yin and Cui6 and Lin et al.,16 especially for large systems. Moreover, the developed method is easy to extend to the case when the systems are with multi-state components, while the methods of Lin et al.16 and Yin and Cui6 can not. Finally, some examples have been presented to illustrate the proposed method of computing the reliabilities of and systems and to demonstrate the efficiency of the method developed here.
Many extensions of this work will be worth investigating in the future. For example, we can consider the system and its components to have more than two possible states in the multi-state case. Also, we can develop optimal maintenance policy for and systems with multi-state components. We are currently working on these problems and hope to report the findings in a future paper.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grants 71631001, the Natural Sciences and Engineering Research Council of Canada through an Individual Discovery Grant RGPIN-2020-06733, and the China Scholarship Council (202106030144).
ORCID iD
Juan Yin
References
1.
KontoleonJM.Reliability determination of a r-successive-out-of-n: F system. IEEE Trans Reliab1980; R-29(5): 437–438.
2.
ChiangDTNiuSC.Reliability of consecutive-k-out-of-n: F system. IEEE Trans Reliab1981; R-30(1): 87–89.
3.
DermanCLiebermanGJRossSM.On the consecutive-k-of-n: F system. IEEE Trans Reliab1982; R-31(1): 57–63.
4.
ChangGJCuiLRHwangFK.Reliabilities of consecutive-k systems. Dordrecht: Kluwer Academic Publishers, 2000.
5.
CuiLRDongQL.Consecutive k and related Models-A survey. Singapore: Springer, 2019.
6.
YinJCuiLR.Reliability for consecutive-k-out-of-n: F systems with shared components between adjacent subsystems. Reliab Eng Syst Saf2021; 210: 107532.
7.
ÖzbeyF.Reliability evaluation of m-consecutive- k, l-out-of-n: F system subjected to shocks. Proc IMechE, Part O: J Risk and Reliability2021; 1748006X2110489. DOI: 10.1177/1748006x211048992
8.
ZhuXYBoushabaMBoulahiaA, et al. A linear m-consecutive-k-out-of-n system with sparse d of non-homogeneous Markov-dependent components. Proc IMechE, Part O: J Risk and Reliability2019; 233(3): 328–337.
9.
EryilmazS.Consecutive k-out-of-n lines with a change point. Proc IMechE, Part O: J Risk and Reliability2016; 230(6): 545–550.
10.
FangCCuiLR.Reliability evaluation of consecutive k-out-of-m: F balanced systems with a symmetry line. Proc IMechE, Part O: J Risk and Reliability2022; 236: 816–827.
11.
WangYHuLMYangL, et al. Reliability modeling and analysis for linear consecutive-k-out-of-n: F retrial systems with two maintenance activities. Reliab Eng Syst Saf2022; 226: 108665.
12.
EryilmazSMahmoudB.Linear m-consecutive-k, l-out-of-n: F system. IEEE Trans Reliab2012; 61(3): 787–791.
13.
DuiHYTianTZZhaoJB, et al. Comparing with the joint importance under consideration of consecutive-k-out-of-n system structure changes. Reliab Eng Syst Saf2022; 219: 108255.
ShenJYCuiLR.Reliability and Birnbaum importance for sparsely connected circular consecutive-k systems. IEEE Trans Reliab2015; 64(4): 1140–1157.
16.
LinCCuiLRCoitDW, et al. Reliability modeling on consecutive--out-of-: F linear zigzag structure and circular polygon structure. IEEE Trans Reliab2016; 65(3): 1509–1521.
17.
YinJCuiLRBalakrishnanN.Reliability of consecutive-(k,l)-out-of-n: F systems with shared components under non-homogeneous Markov dependence. Reliab Eng Syst Saf2022; 224: 108549.
18.
YinJCuiLRSunYD, et al. Reliability modelling for linear and circular k-out-of-n: F systems with shared components. Reliab Eng Syst Saf2022; 219: 108172.
19.
Coolen-MaturiTCoolenFPABalakrishnanN.The joint survival signature of coherent systems with shared components. Reliab Eng Syst Saf2021; 207(3): 107350.
20.
ZarezadehSMohammadiLBalakrishnanN.On the joint signature of several coherent systems with some shared components. Eur J Oper Res2018; 264(3): 1092–1100.
21.
FuJC.Reliability of consecutive-k-out-of-n: F systems with (k-1)-step Markov dependence. IEEE Trans Reliab1986; 35(5): 602–606.
22.
FuJCKoutrasMV.Distribution theory of runs: a Markov chain approach. J Am Stat Assoc1994; 89: 1050–1058.
23.
KoutrasMV.On a Markov chain approach for the study of reliability structures. J Appl Probab1996; 33(02): 357–367.
24.
ChadjiconstantinidisSKoutrasMV.Measures of component importance for Markov chain imbeddable reliability structures. Nav Res Logist1999; 46(6): 613–639.
25.
ChangGJCuiLHwangFK.Reliabilities for (n,f,k) systems. Stat Probab Lett1999; 43(3): 237–242.
26.
KuoWZuoMJ.Optimal reliability modeling: principles and applications. Hoboken, NJ: John Wiley & Sons, 2003.
27.
LinCCuiLRCoitDW, et al. An approximation method for evaluating the reliability of a dynamic k-out-of-n: F system subjected to cyclic alternating operation conditions. Proc IMechE, Part O: J Risk and Reliability2017; 231(2): 109–120.
28.
CuiLRXuYZhaoX.Developments and applications of the finite Markov chain imbedding approach in reliability. IEEE Trans Reliab2010; 59(4): 685–690.
29.
BalakrishnanNKoutrasMV.Runs and scans with applications. New York, NY: John Wiley & Sons, 2002.
30.
FuJCLouWYW. Distribution theory of runs and patterns and its applications. Singapore: World Scientific, 2003.
31.
BalakrishnanNKoutrasMVMilienosFS.Reliability Analysis and plans for successive testing: start-up demonstration tests and applications. San Diego, CA: Academic Press, 2021.