
Abstract
In team sports, linear acceleration is a fundamental skill defining success at a competitive level. While maximal acceleration capability from a static start has been studied extensively, team sport athletes often accelerate from a submaximal speed. This ability to maximally accelerate from a non-static start, in coaching terms “pickup acceleration,” is largely unexplored. In this narrative review, pickup acceleration is defined, and a framework for step analysis is presented. The kinematics, kinetics, and technical demands of pickup acceleration are discussed, and normative data around the pickup steps are highlighted. The practical applications of the findings are then discussed, and future research directions are outlined.
Introduction
In field-based team sports (e.g., soccer, rugby, and football codes), sprint acceleration is a fundamental motor ability. Attaining the highest change in velocity over a certain distance or time (i.e., acceleration) is central to winning in many sports.1,2 Consequently, there is substantial interest in understanding sprinting acceleration performance and its determinants so that they can be monitored and targeted during training.
While sprinting performance is multifaceted, it is typically tested from a static start. The outcome information from these types of linear sprints, such as basic position-time splits or underlying mechanical characteristics (e.g., horizontal force production), can identify athletes with acceleration or maximal velocity deficiencies, determine competitive level, and quantify professional draft positioning.3–5 However, in intermittent-intensity team sports, athletes often initiate horizontal acceleration from a non-stationary position.2,6,7 By nature, these ‘entry’ velocities (i.e., the submaximal velocity attained before the pickup) are submaximal and exist on a continuum spanning low to high velocities (e.g., walk-to-run) in 2–3 s bursts.6,8 The prevalence of non-stationary accelerations varies by sport 9 but typically far outnumber static-start sprints.2,6 For example, there is evidence that 65–85% of total sprints performed in Australian Football League games are performed from non-static starts. 7 Additionally, in Premier League matches, sprints starting from a non-stationary starting point are often initiated from walking (<2 m/s), jogging (<4 m/s), or running speeds (<5.5 m/s), involving at least 0.5 s of high-speed running (5.5–7 m/s), and occur nearly twice as often as other high-intensity activities. 10 Simply put, it is evident that in situ, an athlete's sprint capability is defined instead by the ability to, in coaching terms, ‘pickup’ and maximally accelerate in non-static conditions (i.e., pickup acceleration) and across a continuum of velocities.
If pickup acceleration is common within most team sport contexts, the logical question is whether it is a different motor quality to static start acceleration. That is, do athletes with great static start acceleration also have great pickup acceleration? Testing by this research group with mixed sport athletes using an LED pacing system to control entry velocity and robotic resistance to collect kinematic and kinetic data has confirmed that pickup acceleration and static start sprinting appear to be distinct motor qualities, likely requiring different assessment and training approaches. To further illustrate this point, a rank order analysis for amax (maximal acceleration) is shown in Figure 1. In this figure, the far-left column contains the rank order of athletes for a static start acceleration, from fastest pickup to slowest (1 being the fastest and 15 being the slowest). The differences between the static start and pickup ranking can be observed; in this case, the athlete order fluctuates with each entry velocity tested, meaning that the motor qualities needed for picking up at different speeds also seem unique. For example, in the amax rankings, athlete 5 ranked 1st from a static start and 1.5 m/s, and 14th at 3.0 m/s. Conversely, athlete 18 ranked 13th from a static start, 5th at 1.5 m/s, and 1st at 3.0 m/s.
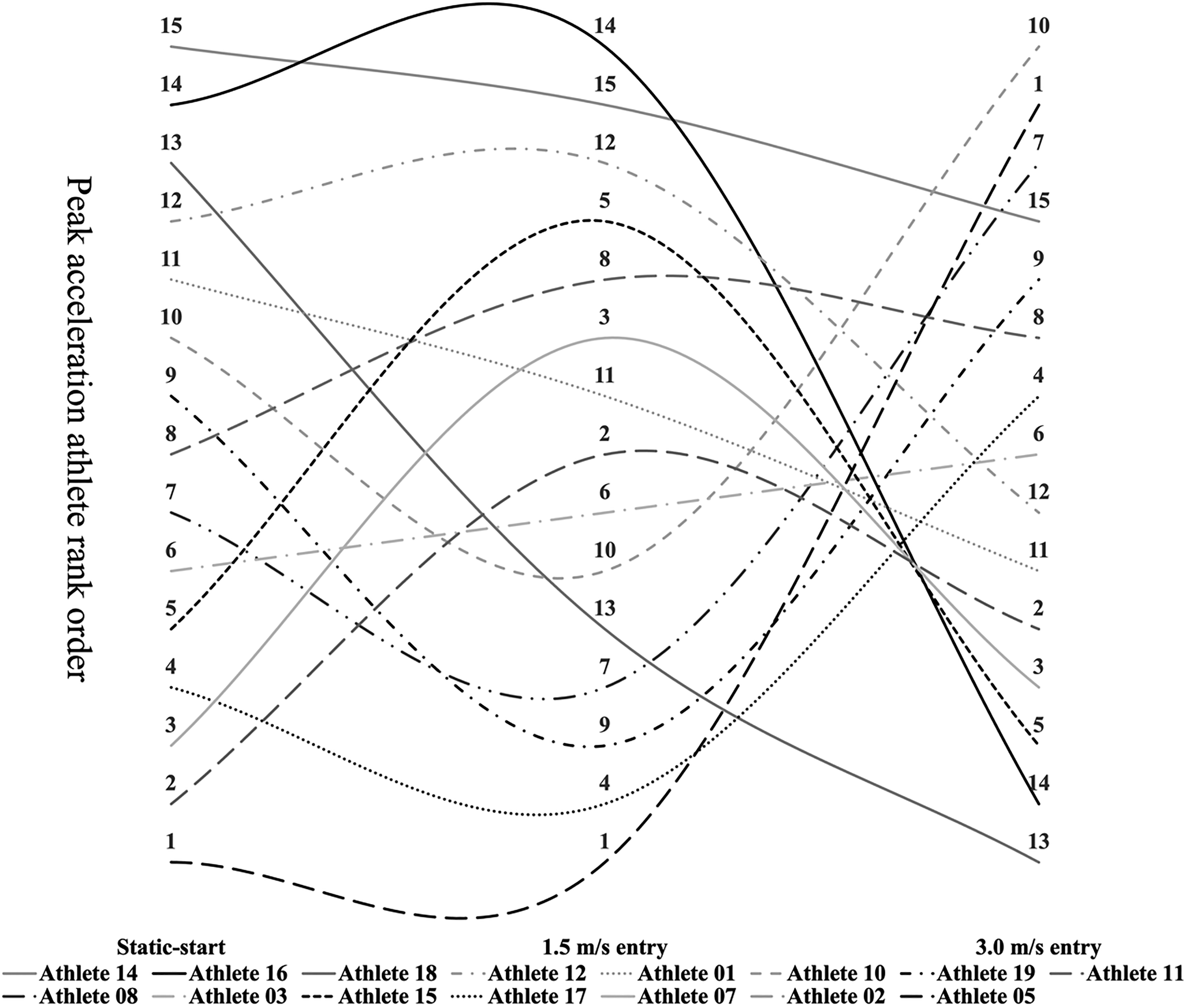
Rank order analysis for pickup and static start amax across all athletes.
Given this relative independence between motor qualities, identifying how these motor qualities may differ and providing insight into the assessment and training of pickup acceleration is warranted. The literature search focused on pickup acceleration, particularly research comparing static and pickup acceleration characteristics. First, pickup acceleration is defined, and a framework for ensuing step analysis is described. Thereafter, the kinematics, kinetics, and technical demands associated with pickup acceleration are detailed to provide an understanding of this motor quality. Finally, practical applications and future research directions are elaborated on.
Pickup acceleration framework for analysis
Gait researchers have defined pickup acceleration by labeling the steps based on their position during the transition from walking to jogging.11–13 In the gait transition literature, steps are commonly labeled as a negative integer (i.e., −2, −1) if they occur before the transition (i.e., entry), 0 for the transition step, and a positive integer (i.e., 1, 2) for the pickup steps post-transition.12,14,15 From a walking entry, the transition step is the first step with a verifiable flight phase, a diagrammatic of these phases/steps can be seen in Figure 2.
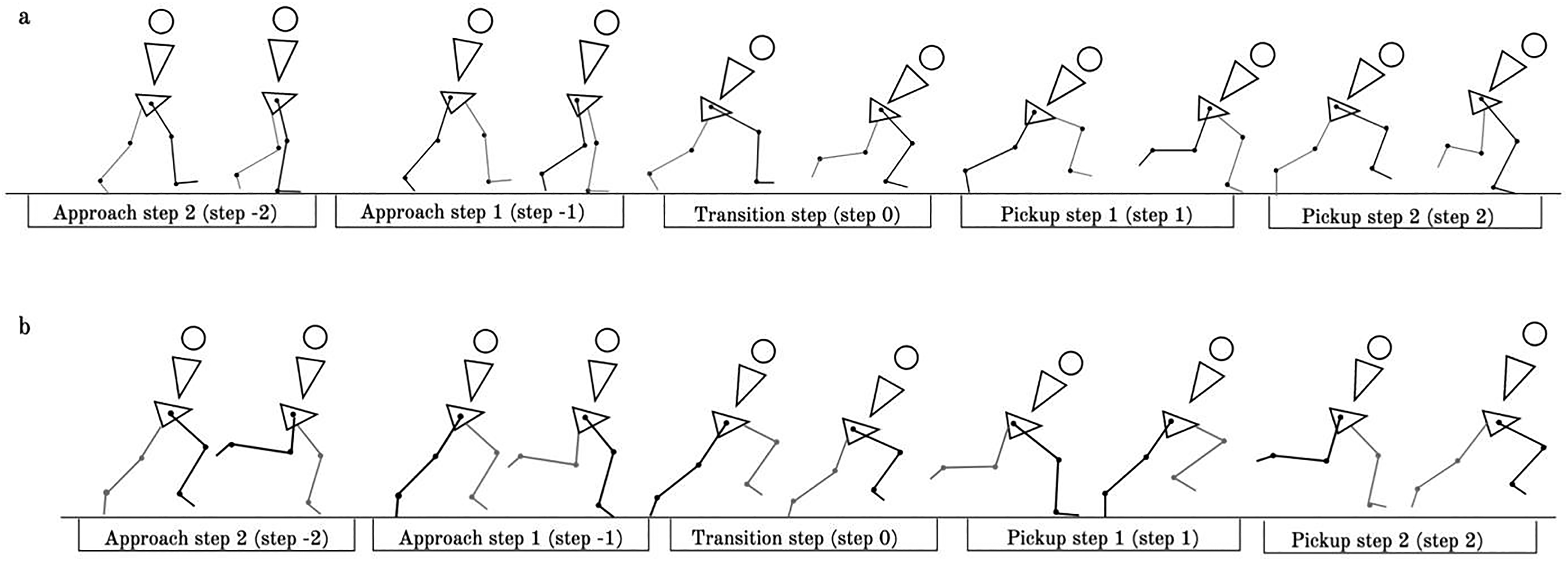
Stick figure diagrammatic of walking (2a) and jogging entries (2b) showing steps −2 through 2.
The apparent differences between static and non-static start sprinting are the entry velocity, the transition step, and, consequently, the need to perform a maximal acceleration when already moving at a submaximal pace. To ‘pickup’ and maximally accelerate requires an athlete to transition between these submaximal and maximal states. Pickup acceleration can occur from various entry velocities. For simplicity, these efforts can be categorized based on three entry velocities: low velocity (walking), moderate velocity (jogging), and high velocity (running). These entry velocities quasi-match what is observed in the literature about game scenarios such as controlling and advancing possession of the ball or evasion of opponents.16,17 Recognizing these distinctions would seemingly allow coaches to tailor sprint training to better simulate game-specific demands, enhancing an athlete's ability to transition efficiently between movement speeds and react to dynamic in-game scenarios. Because of this, it has attracted interest in the literature, albeit mostly within the gait and/or physical therapy space,11,12,14 these steps (step −2, step −1, the transition step, step 1, and step 2) provide the initial focus of this article. Moving forward, we propose a new naming schema for the analysis of these steps, one that is more descriptive. Henceforth, steps −2 and −1 will be known as the approach steps, step 0 is the transition step, and steps 1 and 2 will be known as the pickup steps.
Kinematics, kinetics, and technical demands of pickup acceleration
In this section, kinematic, kinetic, technical information, and normative data are provided that can inform the understanding of pickup acceleration; however, there are some limitations that the reader should be aware of when interpreting this section. Most researchers have investigated walk-to-run transitions using gradual speed increases on instrumented treadmills. Only Segers and De Smet18–20 explored spontaneous velocity increases, termed “burst transitions” or “spontaneous overground walk-to-run transitions.” This is problematic because sporting events commonly see the transition from low to high speed occur suddenly, with nearly instantaneous acceleration. The research groups that did adopt such an approach frequently reported on acceleration; however, some limitations must be acknowledged. First, unlike breakaways or defensive turnovers where sprint speed increases rapidly, authors18,19 instructed their athletes to assume a steady pace, followed by an acceleration to a controlled submaximal velocity rather than maximally accelerating. Thus, the magnitude of kinetic and kinematic measures will likely differ in instances where maximal acceleration is needed. Finally, the populations studied were small groups (9–17) of female subjects, with no mention of an athletic background, calling into question each athlete's sprint-focused technical and mechanical abilities.
It is essential to recognize that any analysis of pickup acceleration will depend on the initial entry velocity, whether walking, jogging, or running. It must be noted that step and joint kinematics and kinetics for a jogging entry are largely nebulous, with only a few studies conducted on pickups outside of a walking entry.21,22 The literature discussed herewith should be interpreted in this context.
Within a broad context of gait mechanics, the fundamental components of gait encompass stance (initial contact, midstance, and toe-off) and swing (early, middle, and late). 23 Another underlying difference between entries is the gait patterning involved; mainly, a walking entry is characterized by periods of double contact support, whereas jogging is characterized by single contact support. 18 In the subsequent sections, we will present the kinematics and kinetics from the gait transition literature collected from the stance and flight phases of the different pickup acceleration steps, contextualizing the available findings into technical considerations for the sports coach.
Approach steps −2 and −1
Kinematics: The approach steps fall under the parameters of typical walking steps. Joint velocities and flexion angles at the knee, hip, and ankle closely align for both approach step −2 and approach step −1. 18 Approach step −1 is the penultimate step before the transition. Regarding approach step −1 kinematics (see Table 1), the average velocities ranged from 2.24 m/s to 2.34 m/s.13,19 The averaged step length (SL) and step frequency (SF) were 0.96 ± 0.02 m and 2.38 ± 0.04 Hz, respectively.13,19 Step lengths ranged from 0.95 to 0.97 m, whereas SF ranged from 2.34 to 2.41 Hz across the two studies reviewed.13,19 Flight time (FT) and ground contact time (GCT) were not reported in the studies reviewed. The reader should note that kinematic values for approach step −2 are scarcely reported in the spontaneous pickup acceleration literature due to their typical walking gait steps. Therefore, the decision was made to omit these from the table. Discussion on approach step −2 is used to add further context to the approach.
Averaged step-to-step changes in walking entry pickup acceleration step kinematics.

Note: m = meters; m/s = meters per second; Hz = Hertz; SD = standard deviation.
Kinetics: Existing research on walking and jogging entry steps has primarily focused on limited metrics: vertical braking (IMP V -) and propulsive (IMP V +) and horizontal braking (IMP H -) and propulsive impulses (IMP H +). These impulses represent the product of forces applied in vertical and horizontal directions with respect to time.18,20,22,24,25 Vertical ground reaction force (VGRF) was also reported in terms of walking entry approach steps. For the approach steps, the total VGRF was noted as 129.95% and 126.77% body weight for steps −2 and −1, respectively. 15 Regarding approach step −2, researchers 18 found an IMP V - of 1.3 Ns/kg−1, while IMP V + was noted as 0.86 N s kg−1. From step approach −2 to −1, IMP V - increased by 0.33 N s kg−1 (∼25%), and IMP V + decreased by 0.24 Ns/kg−1 (∼28%). Approach step −2 IMP H - was reported at 0.27 ± 0.04 Ns/kg−1, and IMP H + was 0.12 N s kg−1. When examining step −1, IMP H - decreased slightly (∼4%), and IMP H + increased (0.02 Ns/kg−1, ∼17%). 18
In summary, higher total VGRF with step −2 and greater braking forces were observed on the approach steps, with step −1 shifting towards increased propulsive forces, highlighting a transition towards forward acceleration. For the sports performance coach, mitigating excessive braking forces in the steps leading up to the transition and maximizing a propulsion strategy would seemingly be important.
Technical: During a walking entry, approach step −1 falls within the parameters defining walking gait and is characterized by double support ground contact and the absence of a flight phase.11,12,18 During approach step −1, the athlete's trunk exhibits ∼7 degrees more forward lean and increased hip, knee, and ankle flexion compared to approach step −2. 18 This postural change comes from two distinct sources: gravity and increased muscle activity around the trunk and hip. 18 Gravity only explains ∼15% of the motion, whereas mechanical input from the muscles flexing the trunk explains the rest. 18 In the lower body, tibialis anterior activity increases upon foot strike and influences dorsiflexion, followed by gastrocnemius activity, which increases during stance. 26 With the increase in knee flexion, the rectus femoris and vastus lateralis activation are greater during the weight acceptance period and longer-lasting duration in the case of the rectus femoris. 26 Concurrently, gluteus maximus activity rapidly intensifies and helps to drive increases in horizontal propulsive force. 27 These postural and muscle activation patterns are also accompanied by marginal, insignificant changes in spatiotemporal variables, like velocity (0.19 m/s, ∼8.9% increase), SF (0.08 Hz, ∼3.4% increase), and SL (0.05 m, ∼5.5% increase) between step −2 and −1.13,18,19 Horizontal braking force on this step is similar to approach step −2; however, acceleration has been shown to increase slightly (+0.5 m/s2) due to a slight increase in IMP H + (0.02 Ns/kg−1, ∼+16.6%), as well as a consistent application of IMP H -. 18 This increase in IMP H + likely stems from changes in muscle activity across the hip, knee, and ankle in preparation for the transition into pickup acceleration. 18
While there is little data available for an instantaneous pickup acceleration from a jogging entry, the approach step kinematics should ostensibly align with the parameters of a typical jogging gait with larger overall joint ranges of motion than walking. 28 This would mean that compared to a walking entry, a jogging entry CoM velocity is faster, SF is higher, and SL is longer. Accelerative capacity is lower due to being closer to the respective vmax.28,29 Athletes entering the pickup from a jog are consistently in single support, with a flat-foot contact (at low to moderate jogging speeds). 28 This flat-footed landing increases power absorption early in the stance phase, with the ankle generating ∼3x as much power as it absorbed and the knee absorbing ∼3.6x power as much absorption. 30
In summary, during a walking entry, approach step −1 aligns with walking gait characteristics, including double support contact and no flight phase, but involves greater trunk forward lean and increased lower-body flexion, driven mainly by muscular effort rather than gravity. In contrast, a jogging entry follows typical jogging mechanics with larger joint movements, higher velocity, and single-support foot contact, leading to greater early stance power absorption at the ankle and knee but a reduced ability to accelerate due to being closer to top speed. Sports performance coaches would be wise to monitor the amount of trunk lean and lower body flexion associated with each entry velocity for excessive collapse.
Transition step
Kinematics: The transition step is the step that allows for the change between gait patterns and is the last step with a dual-support phase. 18 This step was found to have the largest step-to-step change in velocity (upwards of 30% from walking), with acceleration values ranging from 2.62–3.63 m/s2.13,18,20 Regarding transition step kinematics, the average velocity was 0.46 m/s (∼17%) faster than step −1. Step length increased by 0.26 m (∼27%).13,19 Step frequency minutely decreased (SF: −0.12 Hz, ∼5%); however, the range of values was wider (2.22–2.6 Hz) and collected from three studies rather than two.13,18,19 Once again, FT and GCT were not reported. Note that from a jogging entry, the trunk lean was found to be lesser than a static start (34 ° vs 40°); however, this information must be interpreted with caution as the authors did not identify individual steps but rather collected 2–3 total steps from an unidentified transition point and controlled the entry through unknown visual observation methods. 22
During the walking entry transition step, the ankle shows increased dorsi- and plantarflexion velocities at the joint level with enhanced net joint power generation post-midstance. At the same time, the knee exhibits greater initial flexion and subsequent extension velocities and moments (actual values were not listed). 18 The MTP joint and toe flexors contribute significantly to sprint performance, particularly during acceleration's forward-inclined postures. 31 Faster sprinters in a static start display higher maximal MTP joint extension rates and greater normalized plantar flexor moments, with a moderate association (r = −0.33, p = 0.02) observed between MTP joint maximal isometric torque and 10 m sprint time. 32 Thus, we can posit that during a pickup, the MTP joint, foot, and ankle function is critical for success. These changes in lower body joint flexion and extension allow the inference that, similar to a static start, stored potential energy likely supports the plantar flexor stretch-shortening cycle during late stance push-off. 33 This underscores the importance of considering the entire lower limb kinetic chain in optimizing pickup acceleration performance.
In summary, the transition step facilitates the shift between gait patterns, showing the largest velocity increase (up to 30%) and acceleration between 2.62–3.63 m/s², with notable increases in step length and slight decreases in step frequency. Increased ankle and MTP joint power and stored energy help the calf complex to generate force more efficiently, highlighting the importance of the lower limb kinetic chain in pickup acceleration performance. With the transition step being essential for the ensuing acceleration, coaches should incorporate lower-body range of motion exercises along with dynamic movements biased towards improving the stretch-shortening cycle function.
Kinetics: The walking entry transition step determines the effectiveness of the consequent pickup acceleration, with the speed increase coming from an increase in IMP H + and IMP V + but, more importantly, via a decrease in IMP V - and IMP H -. The total VGRF for the transition step was noted as 130.87% body weight, which was similar to the previous steps. 15 IMP V - dropped 0.51 Ns/kg−1 (∼41%), while IMP V + increased substantially (1.25 Ns/kg −1, ∼202%) compared to step −1, largely due to greater work at the ankle and knee joints. Across the transition step, a substantial decrease in IMP H - of 0.08 Ns/kg−1 (∼31%) was noted, with a sizeable concurrent increase in IMP H + of 0.09 Ns/kg−1 (∼64%). Notably, the decreases in IMP H - and IMP V - allow a net increase in horizontal and vertical propulsive forces, likely aided by a stretch reflex through the quadriceps 18 driving the vertical CoM change and initiating the first flight phase. In static start acceleration, IMP V + correlates with SL and FT over the first 4 steps (r = 0.50, 0.48). 34 It's reasonable to hypothesize that similar relationships exist in walking entry pickup accelerations, emphasizing the importance of vertical force application in both scenarios. Similarly, a jogging entry (∼3 m/s) performance differs when accelerating, with superior-performing subgroups from this cohort showing higher IMP H + . 22
In summary, acceleration effectiveness is driven by increased IMP H + and IMP V + during the walking entry transition step, while reductions in IMP H - and IMP V - enhance net propulsive forces. These changes, supported by greater work at the ankle and knee, contribute to greater vertical CoM displacement and the initiation of the first flight phase. IMP V + correlates with SL and FT in static start acceleration, suggesting a similar relationship in walking entry pickups. Higher-performing athletes generate greater IMP H + in jogging entries, but acceleration differs due to posture and force application adjustments. Sports performance coaches looking to improve pickup acceleration should focus on enhancing horizontal and vertical propulsive impulse to positively affect SL and FT changes.
Technical: The walking entry transition step marks the move from a walking gait to a running gait. In preparation for the ensuing acceleration, the athlete's posture moves towards an increase in forward lean, reaching its peak of approximately 20° of trunk flexion at mid-stance. 18 To maximize horizontal acceleration in a static start, the athlete must align their posture, CoM, and ground contact with the intended orientation of force production by optimizing the anterior touchdown distance (anterior distance between the line of the CoM and contact point of the stance leg on ground contact).35–37 This reorganization allows increased ankle dorsiflexion, hip and knee flexion, and trunk anteversion, which lowers the CoM height (see Figure 2). 11 In the context of lower body realignment, instantaneous maximal pickup acceleration from a walking entry resembles static start sprinting. During the swing phase of the transition step, recovery mechanics (i.e., the positioning of the lower leg relative to the hip and shoulders) are believed to influence the application of propulsive force. 20 A positive shin angle at foot strike (resulting from increased trunk, hip, and knee flexion) gives rise to the velocity increases noted through reduced F H - and increased F H + .18,20 Positioning the CoM over the stance leg by anterior translation of the trunk or posterior translation of the limb 20 enables the generation of higher VGRF and HGRF (horizontal ground reaction forces), feeding an increased CoM height during the second half of the stance phase and, therefore propulsion into the initial flight phase associated with sprinting.18,37,38 Accordingly, we can reason that during the transition step of a walking entry, the lower leg rolling further over the stance foot, i.e., “shin roll” of the stance leg, enables an acceleration posture and improves force orientation (see Figure 2). 39 Multiple studies36,37,40 found that better performance in early acceleration, seen as a more horizontally biased ratio of forces (ratio of F V : F H ; RF%), can be derived by positioning the CoM ahead of the lower body support. However, as velocity increases and the athlete's posture becomes more upright during the acceleration phase, this ratio of forces gradually shifts towards a more vertical orientation. The difference in the amount of forward lean experienced between pickup acceleration skill levels is yet to be defined.
Much less is known about the spontaneous transition from a jogging entry. Kugler 22 observed that with increasing entry velocities, the athlete landed with a more upright body position and took off with a slight incline, marking one of the key differences between walking and jogging transitions. Due to this difference in posture, a lower IMP H + is noted compared to a static start acceleration. 22 Thus, we can surmise that on a jogging entry, the mitigation of excess horizontal braking forces and FT during and after the transition would seemingly be important for maximizing performance. A more vertically biased RF% resulted in a more upright posture and shorter GCT, so we can surmise that vertical propulsive forces dominate horizontal propulsive forces with faster velocities. 41 Thus, we can presume that the faster jogging entry velocity seemingly would place the athlete further towards the velocity end of the force-velocity spectrum than a walking start, which in turn would bias the movement to being more reliant on the stretch-shortening cycle.22,42 Thus, we can reason that on a jogging start, higher performance on the transition step shown by rapid increases in velocity will be largely realized from less pronounced but swifter changes in SF and SL 21 (possibly due to being closer to the athlete's vmax, maximum SL and SF). Any inefficiencies in recovery mechanics detract from the athlete's speed potential by giving rise to suboptimal SL and SF.
In summary, the transition step shifts gait from walking to running, with ∼20° forward trunk lean optimizing posture, CoM, and ground contact for force production. Increased hip, knee, and ankle flexion improves acceleration mechanics, while a positive shin angle enhances horizontal propulsion. CoM over the stance leg boosts VGRF and HGRF, aiding flight phase initiation. Jogging entries involve a more upright posture with lower IMP H +, requiring efficient recovery mechanics and SL/SF adjustments. Faster entries push athletes further along the force-velocity spectrum, increasing reliance on the stretch-shortening cycle. Sports performance coaches should tailor acceleration drills to the entry velocity, emphasizing trunk lean and shin angles in walking entries, recovery mechanics, and stretch-shortening cycle utilization in jogging entries.
Pickup steps 1 and 2
Kinematics: Pickup step 1 is the step immediately after the transition step. From a walking entry, this step is more closely aligned with running than it is with walking due to the athlete's body position being inclined forward and the CoM accelerating slightly more vertically than the previous step. Step 1 mean velocity was 0.26 m/s (∼9.5%) faster than the transition step average velocities (see Table 1), ranging from 2.95 to 3.11 m/s.13,18,19 SL decreased by 0.05 m (∼ 4%),13,19 and SF increased by 0.35 Hz (∼13.5%).13,18,19 SL and SF ranged from 1.14 to 1.20 m and 2.56 to 2.60 Hz, respectively.16,17,21 For pickup step 2, specific kinematic values were not reported. However, since the athlete has transitioned to sprinting, we can expect the acceleration kinematics from pickup step 1 onwards to mirror those of a static start. 18 While step lengths for pickup step 2 were not explicitly detailed, the authors reported that SL increased from pickup step 1, with SF remaining constant. 18 In summary, Pickup step 1 shows a shift toward running, with increased velocity and a slight vertical CoM acceleration. Step length decreases while step frequency increases, and pickup step 2 follows similar kinematic patterns to static start acceleration, with step length increasing and frequency staying constant.
In summary, pickup step 1 is the first sprinting step after the transition, characterized by increased velocity, a slight vertical CoM acceleration, shorter step length, and higher step frequency. In contrast, pickup step 2 follows static start acceleration patterns with increasing SL. Sports performance coaches should emphasize rapid SL and SF increases and forward propulsion in pickup step 1 and 2 to optimize pickup acceleration mechanics.
Kinetics: VGRF for step 1 is reported as a mean of 174.93% body weight, a 34% increase from the previous step. IMP V + increased (67%) to 0.75 Ns/kg−1 18 compared to the transition step. IMP V - increased by 0.68 Ns/kg−1 (∼38%), and IMP V + was similar at 1.87 Ns/kg−1. 18 IMP H - increased by 0.06 Ns/kg−1 (33%), and IMP H + decreased by 0.05 Ns/kg−1 (28%). Like the transition step, step kinetics from a jogging entry have been largely overlooked.
Joint kinetics for the pickup step during a jogging entry have not been studied, so key performance indicators from a granular standpoint are unclear, however, we can find similarities from the static start literature. For example, pickup step 1 in the spontaneous walking entry literature shows a larger peak ankle extension moment, a similar peak knee extension moment, and a larger hip peak flexion moment compared to the transition step (values were not provided). 18 From a static start, along with the gastrocnemius, the hamstrings and hip extensors are the primary power generators, with the quadriceps providing vertical stabilization and propulsion. 43
In summary, VGRF in pickup step 1 increased by 34%, with notable changes in IMP V + and IMP V -. Joint kinetics from a jogging entry are unclear, but from the static start literature, it would seem that gastrocnemius, hamstrings, and hip extensors are key power generators. Sports performance coaches should prioritize strengthening the gastrocnemius, hamstrings, and hip extensors for optimal power generation in pickup step 1 while ensuring quadriceps development for vertical stabilization and propulsion, particularly when transitioning from different entry velocities.
Technical: The mechanics of pickup step 1 will likely be congruent with typical sprint acceleration steps. Consistent with this alignment, the muscle activation patterns for the first two pickup steps resemble those of running, suggesting similarity to the first two steps of a static start. 18 Therefore, it may be expected that kinematic and kinetic measures during the pickup steps will be similar to those found in the existing sprint acceleration literature. Additionally, stiffness plays a crucial role in facilitating efficient force application for the pickup steps when transitioning from walking or jogging to sprinting. Therefore, it may be posited that when performing spontaneous pickup acceleration from a walk or jog, an optimal transition could result from a combination of factors: self-organized step length, appropriate forward trunk lean, and sufficient ankle stiffness to shorten the pickup step's GCT.
As running speed increases, stiffness increases in both the vertical direction and at the knee joint, while ankle stiffness stays relatively constant.44, 45 However, in static start acceleration, increased propulsive forces and reduced dorsiflexion range of motion can occur through increases in ankle joint stiffness. 43 Charalambous 43 found strong correlations between ankle stiffness and vertical CoM velocity (r = 0.88, p < 0.01), as well as between horizontal take-off velocity and eccentric phase (dorsiflexion) stiffness during static starts (r = 0.74, p = 0.02). These findings may extend to pickup acceleration scenarios, suggesting similar relationships could exist during transitioning from walking or jogging to sprinting. For jogging entry pickup acceleration, where pre-transition GCT is already shorter and knee, hip, and ankle joint flexion angles are less pronounced than a walking entry, the focus would seemingly shift to increasing overall leg stiffness.
In summary, it appears that pickup step 1 and 2 mechanics resemble the first two steps of static start acceleration, with similar muscle activation patterns. Increased leg stiffness, particularly in the ankle, is crucial in efficient force application, especially during jogging entries where joint flexion is less pronounced. Sports performance coaches looking to improve pickup acceleration should work to enhance leg and ankle joint stiffness qualities.
Summary, practical applications and future research
Pickup acceleration consists of three distinct phases: the entry or approach steps (−2, −1), the transition step (0 step), and the pickup steps (1,2). Previous researchers have focused primarily on approach step −1, the transition step, and pickup step 1. This motor quality differs from static start acceleration in terms of the initial starting velocity and individual step characteristics. Pickup acceleration operates within a continuum and is impacted directly by the entry velocity at which it occurs. Furthermore, optimization of the RF% (via foot placement closer to the line of the CoM on the transition and pickup steps), SL, and SF at each entry velocity can lead to higher acceleration rates. 20 Therefore, performance can be presumed to rely not only on maximizing the contribution of essential components underlying sprinting at the given phase/velocity at which the athlete performs the pickup but also on qualities unique to the pickup. Observed adjustments from a walking entry include truncated dual-support phases, 18 differential trunk positioning between pre and post-transition,18,20 fluctuating step lengths and durations, 15 reduced SF, 13 and step-by-step rapidly evolving GRF profile. 15 Though the determinants of effective pickup transitions remain unclear, using in-ground force plates or devices, such as horizontal tethered devices or other robotic resistance devices in combination with videography, may provide insight into how individuals modulate technique and force application to improve this motor quality.
For coaches in team sports, quantifying an athlete's capability to attain higher velocities quickly over short distances provides advantages such as determining draft position, talent identification, and capitalizing on rapidly changing in-game situations. The further development and refinement of the assessment methods for pickup acceleration will allow practitioners to identify technical weaknesses and design targeted and bespoke training regimens. Consequently, the tracking and analysis of changes in key biomechanical variables, including velocity, acceleration, horizontally directed force, step lengths, and their respective rates of change during pickup acceleration tasks can offer insights into an athlete's readiness (e.g., injury status in return to play settings), training response (increased transfer of training, enhancement of position-specific performance qualities), and potential for sprint performance optimization (kinematic and kinetic benchmark improvements), much in the same way that static start performance is monitored.44,45 This tracking and analysis should be further expanded by including step −2 to verify entry velocity fidelity and pickup step 2 to assess for physical or technical faults or inefficiencies post-transition, with the changes by the athlete likely extending beyond the approach and transition steps.
Given the scarcity of literature and some of the inferences proposed during the review focusing on the determinants of pickup acceleration, several research directions are proposed. 1) How step kinematics, such as body posture and SL, differ amongst pickup acceleration entry velocities has yet to be fully examined, and it may be surmised that the inclination of the torso and variation in step lengths will affect movement strategy. 2) Video analysis of joint kinematics is needed particularly, monitoring and measurement of the take-off angles (angle of the athlete's CoM on toe-off, relative to the global horizontal), hip angle (the angle of the swing leg thigh relative to the trunk); knee angle (angle made by measuring the angles of the thigh and shank closest to the camera at toe-off); and, swing leg shank angle (the angle of the shank relative to the global horizontal). That pickup acceleration effectiveness may depend on how the athlete manages these kinematic outputs while entering the acceleration continuum. However, further research is needed to determine if this is true, whether these variables are reliable, and if better kinematic variables exist for describing or predicting pickup acceleration performance. 3) The impact of entry velocity on the magnitude of horizontally directed force production during pickup acceleration remains unclear, as does how faster athletes adjust force application to accelerate further. However, it is theorized that the technical aspects influencing force orientation play a crucial role. 4) Finally, given the lack of information surrounding this topic, it is currently unknown what training methods impact the athlete's capability to accelerate from a pickup. Future research must identify assessment technologies/variables and refine training methods to optimize pickup acceleration capability.
Footnotes
Acknowledgments
The authors are grateful to Barry Vonada (BV systems) for utilizing and assisting with the LED Rabbit and Dr Ola Eriksrud for technical assistance with the 1080 Sprint.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Ethical declarations
Ethical approval was granted by the Auckland University of Technology Ethical Committee, reference number 21/437.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.