
Abstract
Previous studies have shown that choices about how to configure stepping-stones to be used as playground or exercise equipment reflect a person’s action capabilities. In two experiments, we investigated whether choices about how to configure stepping-stones to be used as a path for locomotion additionally reflect the goals for which or the constraints under which the path is to be used. In Experiment 1, participants created stepping-stone configurations (with rubber mats) that would allow them to cross a given space quickly, comfortably, or carefully. Configurations in the “Quickly” condition consisted of fewer mats, and longer mean (linear) distances between mats, and greater “challenge” (relative to maximum stepping distance) than in the other two conditions. In Experiment 2, participants created stepping-stone configurations that would be fun to use or that would be easy to use to cross a given space. Configurations in the “Fun” condition consisted of more mats, longer linear distances between mats, and greater “challenge” than those in the “Easy” condition. Moreover, paths in the “Fun” condition were also wider, longer, and exhibited larger changes in distances and angles between consecutive mats than in the “Easy” condition. The results are discussed both in terms of implications for understanding affordances and for the design of stepping-stone paths.
Successfully performing any behaviour requires perceiving and acting with respect to affordances—opportunities for behaviour that emerge from relations between action capabilities and environmental properties (Gibson, 1979/2015; Stoffregen, 2003). Of particular importance for many affordances is the relation between action capabilities and the layout of surrounding surfaces. For example, affordances for behaviours, such as reaching or stepping across a gap emerge from relations between reaching or stepping ability and surface layout (e.g., gap width) together with factors such as the posture from which the behaviour will be attempted (e.g., standing vs. crawling; see Kretch & Adolph, 2013).
Decades of studies have shown that people are sensitive to how relations between their action capabilities and surface layout influences affordances for performing a given behaviour—in particular, whether or not that behaviour can be performed (Dotov et al., 2012; Fajen, et al., 2008; Wagman, 2020). In short, such research has shown that perception of affordances is action-scaled. For example, studies investigating perception of affordances for stepping across a gap found that the maximum gap width that was perceived to afford stepping across occurred at a wider gap width for people with a longer maximum stepping distance than for those with shorter maximum distance but at the same ratio of gap-width-to-maximum-stepping-distance for both groups (Burton, 1992; Day et al., 2015).
Importantly, though, for any given person in any given situation, there will always be a many-to-many relationship between action capabilities and environmental properties—in particular, between action capabilities and the layout of surrounding surfaces. That is, there will always be both many behaviours that a person could perform and many ways that a person could perform any given behaviour. For a person with a given set of action capabilities, a given gap between two surfaces of support will afford many different behaviours, including crossing, standing on, or reaching across, among others. Moreover, such a gap may afford crossing in many different ways—including by stepping, leaping, crawling, swinging, or climbing—from many different postures, and with many different coordination patterns. In short, perceiving and acting with respect to affordances not only requires that a person choose whether to perform a given behaviour but also which behaviour(s) to perform as well as when and how to do so. These choices must be based not merely on the ability to perform a given behaviour, but rather on the ability to do so in the context of overarching goals and task constraints, among other factors (Comalli et al., 2013, 2017; Mark et al., 1997; Wagman et al., 2016).
Accordingly, studies have also shown that people are sensitive to how the goals for which and constraints under which a given behaviour is to be performed influence affordances for that behaviour. In particular, people are sensitive to how such factors influence whether, when, and how a given behaviour can be performed. In short, such research has shown that perception of affordances is context-dependent. For example, studies investigating perception of affordances for passing through a narrow space found that whether and how a person attempts to pass through that space depends on the speed with which they approach the space, what objects or surfaces bound the space, and the consequences of a failed attempt (Comalli et al., 2013; Higuchi et al., 2011; Tomono et al., 2019; Wagman & Malek, 2007). Similarly, studies investigating perception of affordances for reaching an object found that the maximum object distance that was perceived to be reachable occurred at a farther distance and at a larger ratio of object distance-to-maximum-reaching-distance when the overarching goal of the reaching task was to touch the object than when it was to grasp that object (Wagman et al., 2019; Walsh et al., 2023; see Mark et al., 1997).
Creating affordances
In addition to exhibiting sensitivity to affordances that exist given extant relations between action capabilities and the layout of surrounding surfaces, people also exhibit sensitivity to how to reconfigure or alter the surface layout such that a given affordance comes into existence. For example, over several years in early childhood, children become increasingly sensitive to how to reconfigure relations between a hand-held tool and a target object, so that the tool affords retrieving or otherwise affecting a target object (e.g., Bongers et al., 2004; Fitzpatrick et al., 2012; Van Leeuwen, et al., 1994; see Kaplan et al., 2022). In fact, sensitivity to the configurations of surface layout that would afford a given behaviour is explicitly or implicitly exhibited by participants in the many experiments on perception of affordances in which the methodology requires that the participant instruct the experimenter on where and how to position a given surface such that a given behaviour with respect to that surface is afforded (e.g., reaching, standing on, stepping over, e.g., Day et al., 2015; Wagman et al., 2019).
Perhaps more impressively, people are also capable of creating surface layouts de novo such that a given affordance comes into existence (see Withagen & van der Kamp, 2018; see Kimmel & Groth, 2023). One paradigm that researchers have used to investigate this phenomenon is one in which participants are asked to arrange a configuration of stepping-stones such that a given behaviour (or set of behaviours) is afforded. In one such study (Jongeneel et al., 2015), children were asked to arrange a set of stepping-stones in a configuration that they could use as playground equipment—i.e., that afforded jumping from one stone to another. The results showed that children produced non-standardised stepping-stone configurations in which the mean distance between stones was predicted by the children’s perceived maximum jumping distance. In a separate but related study (Jeschke et al., 2020), both younger and older adults were asked to arrange a set of stepping-stones in a configuration that they could use as exercise equipment—i.e., that afforded repeatedly stepping from one stone to another and back again. The results showed that older adults (who exhibited shorter perceived and actual maximum stepping distances) created stepping-stone configurations with shorter mean distances between stones than did the younger adults (who exhibited both larger perceived and actual maximum stepping distances). However, there was no difference in the degree of “challenge”—the ratio of mean gap distance to perceived maximum stepping distance—across the two groups.
The current study
Previous research has shown that people are sensitive to affordances that emerge from relations between their action capabilities and the layout of surrounding surfaces. Choices about whether, when, and how to perform a given behaviour reflect not only this fit but also the overarching goals of and task constraints on that behaviour. Previous research has also shown that people are capable of creating a surface layout de novo such that a given affordance comes into existence. Such choices also reflect a person’s action capabilities. In particular, when people choose how to configure a set of stepping-stones to use as playground or exercise equipment, they produce non-standardised stepping-stone configurations that nonetheless reflect their perceived or actual maximum stepping ability. In particular, individuals with shorter (perceived or actual) maximum stepping distances create stepping-stone configurations with shorter mean distances between stones than people with longer (perceived or actual) maximum stepping distances.
Perhaps a more common use of stepping-stone configurations is as a path by which to cross a given space from one location to another. When using a stepping-stone configuration in this manner, each act of stepping from one stone to another necessarily occurs in context of the overarching goal of or constraints on the crossing task. In two experiments, we investigated whether participants are sensitive to these overarching goals and task constraints in how they choose to configure a set of stepping-stones as a path to cross a given space. That is, we investigated whether they would create different stepping-stone configurations—whether they would create different affordances for crossing the space—depending on the overarching goal of or constraints on the crossing task.
Experiment 1
We compared the stepping-stone path configurations that participants created in three conditions, each of which emphasised a different component of the practicality or expediency of the to-be-created path. In particular, we compared stepping-stone path configurations created for crossing a given space quickly, for doing so comfortably, and for doing so carefully. We analysed path configurations with respect to sets of variables related to distance, trajectory, and variability.
Given that all three Task Constraint conditions emphasised the practicality or expediency of the to-be-created path, we expected that differences in path configurations across these conditions would emerge only with respect to variables related to distance (and not with respect to trajectory or variability). In particular, given the specific emphasis on covering as much ground in as little time as possible in the “Quickly” condition, we expected that—in comparison with the other two conditions—path configurations in this condition would consist of fewer stones and larger mean (linear) distances between stones, thereby creating paths with greater “challenge” (relative to participant maximum stepping distance).
Method
Participants
We conducted an a priori power analysis using the G*Power programme (Faul et al., 2007). Assuming a medium effect size (f = 0.25), G*Power suggested that a sample size of approximately 23 participants would be sufficient to achieve Power of 0.80, given the experimental manipulations and expected patterns of results. Twenty-four undergraduate students were recruited from a pool of Illinois State University psychology students and participated in exchange for course credit. Each participant provided written consent prior to participation. The study protocol was approved by the Institutional Review Board (IRB) and conducted in accordance with the Declaration of Helsinki.
Materials and apparatus
The experiment was conducted in a semi-enclosed outdoor concrete walkway on the Illinois State University campus (see Figure 1). Small red and yellow plastic (truncated) cones were used to mark the corners of a 600 cm long × 300 cm wide rectangular space to be crossed. Two red cones were used to mark the endpoints of the starting line and two yellow cones were used to mark the endpoints of the finish line. Participants created paths by placing circular (orange) rubber mats (25.4 cm or 10 inches in diameter, negligible thickness) one at a time in the rectangular space. Rubberised anti-slip tape was placed on the bottom of each mat. A tape measure was used to measure the location of each mat relative to the starting mat (see below for details, see also Figure 2). Participants completed a packet of Sudoku puzzles after completing each of the first two conditions of the experiment.
The outdoor setting for Experiment 1.
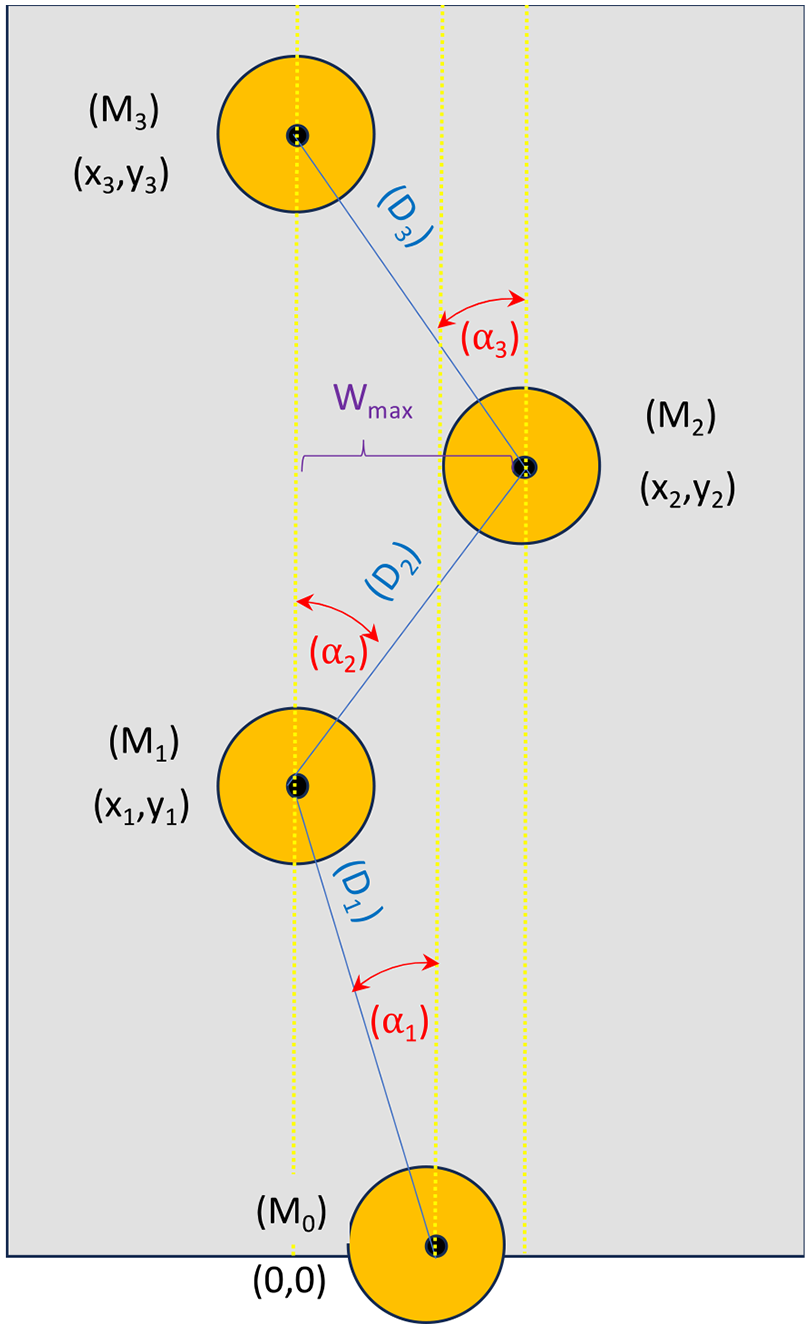
Variables derived from the x and y coordinates of each mat relative to an origin located at the geometric centre of M0 included Mn, D, α, and Wmax. These variables either served as or were used to further derive the analysed sets of dependent measures related to distance, trajectory, and variability.
Procedure
The “starting mat” (M0) was placed on the starting line centred between the two red cones. The participant stood on the starting mat and was handed a stack of 12 additional mats. The participant was then asked to make a path using these mats that would enable them to cross the space between the first mat and the finish line under the following set of conditions: (1) each mat must stepped on in sequence, (2) only one foot could be on any mat at any given time, and (3) no part of any foot could touch the concrete walkway. They were free to use as many or as few mats as they liked from the stack to create the path. They could place the mats anywhere in the rectangular space so long as each subsequent mat was placed closer to the finish line than the preceding mat and the last mat in the series was on (or beyond) the finish line. They were free to move anywhere in the 600 × 300 cm rectangular space while making the path. There was no time limit.
After they had finished making the path in a given Task Constraint condition (Quickly, Comfortably, or Carefully, see below), they were asked to return to the starting mat and use the path to cross the space; while doing so, they could re-adjust the positioning of the mats as they so chose. 1 After the participant did so, they were escorted away from the rectangular space and were asked to work on the packet of Sudoku puzzles. While participants worked on the puzzles, experimenters measured and recorded the locations of each mat—specifically, the x and y coordinates of the geometric centre of each mat relative to an origin located at the geometric centre of the starting mat (see Figure 2).
Participants performed this task in each of three Task Constraint conditions. In the Quickly condition, participants were asked to make a path that would enable them to cross the space as quickly as possible—i.e., with minimal time taken from starting line to finish line. In the Comfortably condition, they were asked to make a path that would enable them to cross the space as comfortably as possible—i.e., with minimal change from their typical walking stride. In the Carefully condition, they were asked to make a path that would enable them to cross the space as carefully as possible—i.e., with minimal chance of any part of their foot contacting the concrete walkway. Each participant created one path in each of the three Task Constraint conditions, with order of Task Constraint conditions counterbalanced across participants.
After the participant completed all three conditions, the experimenters measured the participant’s standing height (linear distance from the ground to the top of the head while standing on the ground) and sitting height (linear distance from the ground to the top of the head while sitting on the ground with their legs extended in front of them). The experimenters also measured the participant’s maximum stepping distance. To do so, the participant was asked to stand with their toes just behind the starting line and step as far as they could with one foot, without lifting the other (trail) foot off the ground. The experimenters measured the linear distance between the starting line and the heel of the stepping foot.
Results
Dependent measures
Using the x and y coordinates of the geometric centre of each mat relative to that of an origin (0, 0) located at the geometric centre of the starting mat (M0), we derived and analysed sets of variables related to gap distance, path trajectory, and path variability (see Figure 2). The set of variables related to gap distance included (1) the total number of mats used to create the path (Mn), (2) the linear distance (D) between (the geometric centres of) consecutive mats, and (3) ChallengeActual—the ratio between the mean linear distance between (the geometric centres of) consecutive mats (i.e., D) and participant’s maximum stepping distance. The set of variables related to trajectory included (4) the (absolute) angular distance (α) between (the geometric centres of) consecutive mats (relative to a line passing through the geometric centre of the first of the two mats and perpendicular to the starting line, see Figure 2), (5) the maximum path width (Wmax, i.e., the absolute distance between the largest and smallest x coordinate values) and (6) total path length—the sum of the linear distances between (the geometric centres) of consecutive mats. The set of variables related to variability included (7) the change in the linear distance between (the geometric centres of) consecutive mats, and (8) the mean (absolute) change in angular distance (i.e., α) between consecutive mats.
Gap distance
The number of mats (Mn) used to create the paths differed across Task Constraint conditions, F(2, 46) = 18.10, ηp2 = 0.44, p < .001. 2 Follow up t-tests with Bonferroni corrections revealed that participants used fewer mats in the Quickly condition (M = 6.79, SD = 2.26) than in either the Comfortably condition (M = 9.17, SD = 1.63, t(23) = 4.10, p < .05) or the Carefully condition (M = 9.45, SD = 1.71, t(23) = 5.51, p < .05) (see Figures 3 and 4, top). Moreover, Mn was negatively correlated with leg length (r = –.56, p < .05) in the Quickly condition and was unrelated to leg length in either of the other two conditions.

Representative path configurations created in the Quickly condition (left), the Comfortably condition (middle), and the Carefully condition (right).
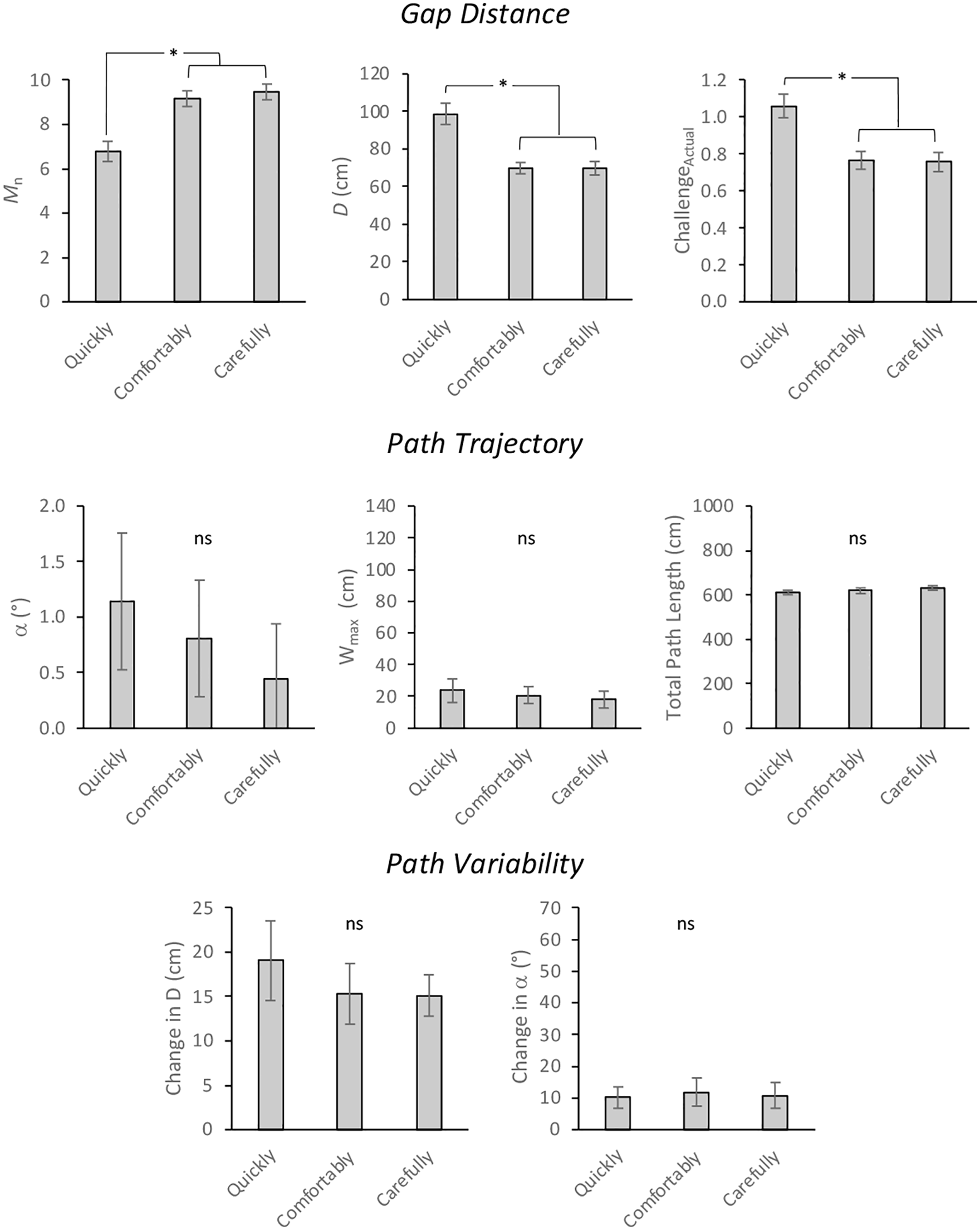
Results of Experiment 1 with respect to variables related to gap distance (top), path trajectory (middle), and path variability (bottom). “*” indicates significant difference at p < 0.05 with Bonferroni corrections.
The mean linear distance between consecutive mats (D) also differed across Task Constraint conditions, F(2,46) = 15.66, ηp2 = 0.41, p < .001. Follow up t-tests with Bonferroni corrections revealed that mean D values were larger in the Quickly condition (M = 98.58 cm, SD = 28.67 cm) than in either the Comfortably condition (M = 69.84 cm, SD = 14.64 cm, t(23) = 4.09, p < .05) or the Carefully condition (M = 69.51 cm, SD = 17.92 cm, t(23) = 4.41, p < .05) (see Figures 3 and 4, top). Moreover, mean D was positively correlated with leg length (r = + 0.55, p < .05) in the Quickly condition but was unrelated to leg length in either of the other two conditions.
The ratio of mean linear distance between each mat and the maximum stepping distance of the participant (ChallengeActual) differed across Task Constraint conditions, F(2,46) = 16.17, ηp2 = 0.41, p < .01. Follow up t-tests with Bonferroni corrections revealed that this ratio was larger in the Quickly condition (M = 1.05, SD = 0.31) than in either the Comfortably condition (M = 0.77, SD = 0.23, t(23) = 4.23, p < .05) or the Carefully condition (M = 0.76, SD = 0.24, t(23) = 4.53, p < .05) (see Figures 3 and 4, top).
Path trajectory
There was no difference in the mean angular distance (α) between consecutive mats, F(2,46) = 0.802, ηp2 = 0.03, ns, in maximum path width, F(2, 46) = 0.62, ηp2 = 0.03, ns] or in total path length, F(2, 46) = 1.03 ηp2 = 0.04, ns, across Task Constraint conditions (see Figure 4, middle). Nonetheless, mean α was positively correlated with actual maximum stepping distance in the Quickly condition (r = + 0.51, p < .05) and was unrelated to actual maximum stepping distance in either of the other two conditions.
Path variability
There was no difference in the mean (absolute) change in D between consecutive mats, F(2, 46) = 0.38, ηp2 = 0.18, ns, or in the mean (absolute) change in α between consecutive mats, F(2,46) = 0.07, ηp2 = 0.03, ns, across Task Constraint conditions (see Figure 4, bottom).
Experiment 2
Experiment 1 found that participants produced different stepping-stone path configurations—they created different affordances for crossing the space—depending on the specific constraints placed on the practicality or expediency of the to-be-created path—i.e., whether the path would be used to cross the space quickly, comfortably, or carefully. As expected, such differences emerged only with respect to gap distance (and not with respect to either path trajectory or path variability). In particular, path configurations in the Quickly condition consisted of fewer mats and longer mean (linear) distances between mats, thereby creating paths with greater challenge (relative to participant actual maximum stepping distance).
In Experiment 1, we hypothesised that since all three conditions emphasised practicality or expediency of the to-be-created path, differences would emerge only with respect to variables related to gap distance. In Experiment 2, we compared stone path configurations under Task Constraint conditions that differed in the degree to which they emphasised practicality or expediency. In particular, we compared stepping-stone path configurations when participants created a path that would be easy 3 to use to cross a given space, and when they created a path that would be fun to use to cross that space. As in Experiment 1, we analysed path configuration with respect to distance, trajectory, and variability.
Given (1) differences in the degree to which the two Task Constraint conditions emphasised the practicality or expediency of the to-be-created path and the results of previous research showing that (2) stepping-stone configurations with large distances between stones are (perceived to be) more challenging (Jeschke et al., 2020, 2023) and (3) non-standardised stepping-stone configurations are rated as being more “fun” to use (Sporrel et al., 2017; but see Jeschke et al., 2022, 2023), we expected differences across the two conditions with respect to all three sets of variables.
In particular, with respect to gap distance, we expected that paths in the Fun condition would consist of fewer mats and longer mean (linear) distances between mats, thereby creating paths with greater “challenge” (relative to perceived and actual maximum stepping distance). Or, said a different way, we expected that paths in the Easy condition would consist of more mats and shorter mean (linear) distances between mats, thereby creating paths with less “challenge” (relative to participant perceived and actual maximum stepping distance).
With respect to path trajectory, we expected that paths in the Fun condition would exhibit both larger mean angular distances between consecutive mats and wider mean maximum path widths. With respect to path variability (and given the hypotheses with respect to path trajectory), we expected that paths made in the Fun condition would exhibit longer total lengths and would exhibit larger mean changes in both linear and angular distances between consecutive mats.
Method
Participants
Twenty-six undergraduate students were recruited from a pool of Illinois State University psychology students and participated in exchange for course credit. Each participant provided written consent prior to participation. The study protocol was approved by the Institutional Review Board (IRB) and conducted in accordance with the Declaration of Helsinki. The perceived maximum stepping distance was not recorded for two participants due to experimenter error.
Materials
The materials and apparatus were identical to Experiment 1 except that the space to be crossed was a 600 cm long × 220 cm wide section of a hallway inside a classroom building on the Illinois State University campus (see Figure 5).

Representative path configurations created in the Fun condition (left) and the Easy condition (right).
Procedure
The procedure was identical to Experiment 1 except for two modifications. First, participants performed this task in each of the two Task Constraint conditions. In the Easy condition, participants were asked to make path that would be easy to use in crossing the space. In the Fun condition, participants were asked to make a path that would be fun to use in crossing the space. 4 Each participant created paths in both Task Constraint conditions, with order of Task Constraint conditions counterbalanced across participants.
Second, after measuring the participant’s standing and sitting height—but before measuring the participant’s maximum stepping distance—the experimenter measured the participant’s perceived maximum stepping distance. The participant was invited to stand with their toes just behind the starting line. The participant used a laser pointer to indicate where the experimenter should place a mat such that it was at the farthest distance that the participant would be able to step with one foot, without lifting the other foot off the ground. Once the experimenter placed the mat at this distance, the participant instructed the experimenter on how to adjust the distance of the mat, if necessary. After the participant stepped onto the mat, the experimenter measured the distance between the starting line and the centre of the mat.
Results
We derived and analysed the same set of measures related to distance, trajectory, and variability as in Experiment 1. In addition, we also derived and analysed one additional measure related to distance—ChallengePerceived: the ratio between the mean linear distance between (the geometric centre of) consecutive mats and participant perceived maximum stepping distance.
Gap distance
Participants used fewer mats in the Easy condition (M = 8.17, SD = 1.67) than in the Fun condition (M = 9.10, SD = 1.81, t(22) = 2.14, p < .05). 5 Despite this, mean D values were larger in the Fun condition (M = 93.76 cm, SD = 21.17) than in the Easy condition (M = 76.79 cm, SD = 14.17, t(22) = 4.02, p < .05) (see Figures 5 and 6, top). In addition, mean D was positively correlated with actual maximum stepping distance condition (r = + 0.42, p < .05) in the Fun condition and was unrelated to actual maximum stepping distance in the Easy condition.
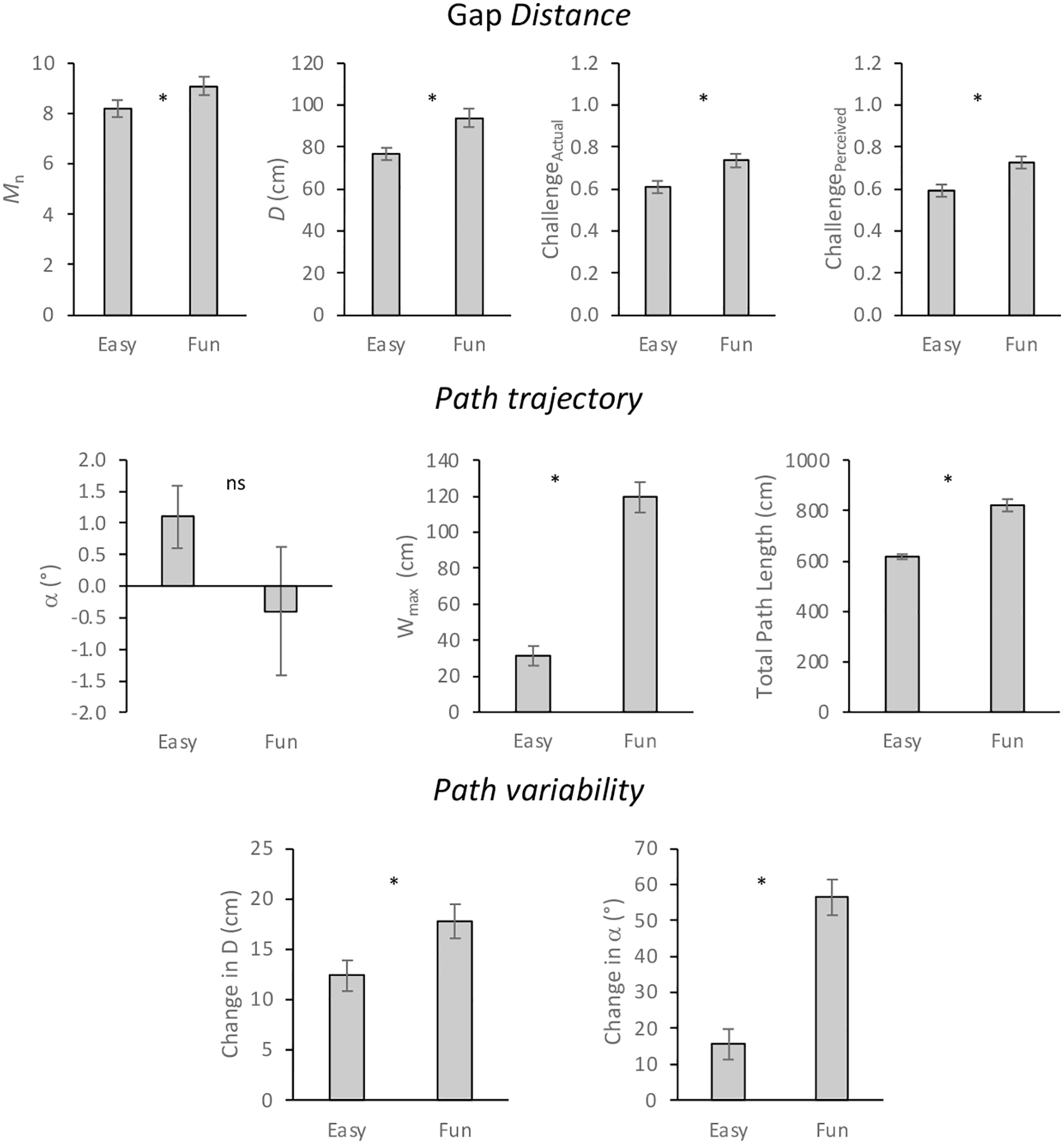
Results of Experiment 2 with respect to variables related to gap distance (top), path trajectory (middle), and path variability (bottom). “*” indicates significant difference at p < .05 with Bonferroni corrections.
The ratio of mean linear distance between each mat and the maximum stepping distance of the participant (ChallengeActual) was larger in the Fun condition (M = 0.74, SD = 0.16) than in the Easy condition (M = 0.61, SD = 0.14, t(22) = 3.92, p < .05) as was the ratio of mean linear distance between each mat and the perceived maximum stepping distance of the participant (ChallengePerceived) (Fun: M = 0.72, SD = 0.14, Easy: M = 0.59, SD = 0.13; t(20) = 4.37, p < .05) (see Figure 5 and Figure 6, top).
Path trajectory
There was no difference in mean α, t(22) = 1.31, ns. However, the maximum path width was wider in the Fun condition (M = 119.52, SD = 41.41) than in the Easy condition (M = 31.35 cm, SD = 25.95 cm, t(22) = 8.75, p < .05), and total path length was longer in the Fun condition (M = 821.67 cm, SD = 125.32) than in the Easy condition (M = 614.90 cm, SD = 46.95, t(22) = 7.00, p < .05) (see Figure 6, middle).
Path variability
The mean (absolute) change in D between consecutive mats was larger in the Fun Condition (M = 17.78 cm, SD = 7.93) than in the Easy Condition (M = 12.37 cm, SD = 7.10 cm), t(22) = 2.49, p < .05) as was the mean change in α between consecutive mats (Fun: M = 56.43°, SD = 23.08°, Easy: M = 15.55°, SD = 20.42°, t(22) = 6.93, p < .05) (see Figures 5 and 6, bottom).
General discussion
Previous research has shown that choices about whether, when, and how to perform a given behaviour reflects both (1) the relation between a person’s action capabilities and the layout of surrounding surfaces and (2) the context in which the behaviour is to be performed—in particular, the goals for which or the constraints under which the behaviour is to be performed (e.g., Higuchi et al., 2011; Mark et al., 1997; Tomono et al., 2019; Walsh et al., 2023). Moreover, people are capable of creating a given surface layout de novo, such that, a given affordance emerges, and choices made in doing so reflect their action capabilities. In particular, choices about how to configure stepping-stones to be used as playground or exercise equipment reflect both perceived and actual maximum stepping distance (Jongeneel et al., 2015; see Jeschke et al., 2020). In the two experiments reported here, we investigated whether choices about how to configure stepping-stones to be used as a path for locomotion also reflect the goals for which or the constraints under which that path is to be used. That is, we investigated whether they created different affordances for crossing the space depending on the on the overarching goal of or constraints on the crossing task.
In Experiment 1, participants created stepping-stone path configurations in three different Task Constraint conditions. Specifically, they created paths that would allow them to cross a given space quickly, comfortably, and carefully. Given that these constraints each emphasised the practicality or expediency of the to-be-created path, we expected differences between the Quickly condition and the other two conditions only with respect to sets of variables related to distance (but not with respect to sets of variables related to trajectory or variability). The results were consistent with these expectations. Stepping-stone path configurations in the “Quickly” condition consisted of fewer mats and longer mean (linear) distances between mats, thereby creating paths with greater “challenge” (relative to participant maximum stepping distance).
In Experiment 2, participants created stepping-stone path configurations in two different Task Constraint conditions. They create a path that would be fun to use to cross a given space and one that would be easy to use to cross that space. Given that these constraints differentially emphasised the practicality or expediency of the path, we expected differences across the two conditions with respect to all three sets of variables. The results were consistent with these expectations. With respect to distance, stepping-stone path configurations in the “Fun” condition consisted of more mats, longer mean (linear) distances between mats, and greater “challenge” (relative to participant perceived and actual maximum stepping distance). With respect to trajectory and variability, path configurations in the “Fun” condition were wider, longer, and exhibited larger changes in distances and angles between consecutive mats than in the “Easy” condition.
The results of the studies reported here show that choices about how to configure stepping-stones to be used as a path for locomotion reflect the constraints under which that path is to be used. That is, people created different affordances for crossing the space depending the overarching goal of or constraints on the crossing task.
In particular, we found that participants created different stepping-stone path configurations when differences in such constraints were made explicit in the instructions about how the path was to be used (e.g., make a path that would be easy to use or one that would be fun to use). Given these results, we would also expect that participants would also create different stepping-stone path configurations when differences in such constraints were implicit in the properties of the stepping-stone (e.g., size, shape, material), the space to be crossed (e.g., size, shape, inclination, ground surface), or both. This is an important topic for future research.
On the whole, the results are consistent with those of previous research. However, some potential deviations—especially with respect to the results of Experiment 2—deserve some mention. In particular, in Experiment 2, we found that “Fun” path configurations exhibited greater “challenge” (relative to participant perceived and actual maximum stepping distance) than “Easy” path configurations. This is potentially at odds with the results of Jeschke et al. (2022, 2023), which failed to show a relation between subjective ratings of how fun and how challenging a given stepping-stone configuration is to use. There are at least two different possible explanations for this discrepancy.
One of these explanations is methodological. Namely, in the research by Jeschke et al. (2022, 2023), participants provided subjective ratings about their experience using existing stepping-stone configurations as exercise or playground equipment—i.e., how fun or how challenging they were to use. These configurations varied in distances between stones, the size (i.e., diameter) of a given stone in the configuration, or the height (i.e., thickness) of a given stone in the configuration. In these studies, variation in stone height was related to ratings of fun (but not challenge), and variation in distance between stones was related to ratings of challenge (but not fun). In the current study, participants configured mats of constant (and negligible) heights to be used as “fun” or “easy” paths for locomotion. Challenge was assessed by a post hoc comparison of some aspect of the configuration (mean distance between mats) and some aspect of the participant’s action capabilities (perceived or maximum stepping distance).
Another explanation has to do with a potential ambiguity in how to interpret the results of the current study. That is, it might be that differences observed in Experiment 2 with respect to mean distance between mats—and therefore ChallengeActual and ChallengePerceived—are being driven more so by path configurations in the Easy condition relative to those in the Fun condition than vice versa. In other words, it might not be so much that path configurations that are fun to use are necessarily challenging but that path configurations that are easy to use are—by definition—not challenging. One piece of evidence in support of this explanation is that mean distance between mats was longer (and therefore challenge was greater) in the Fun condition than in the Easy condition, despite the fact that participants used fewer mats in the Fun condition. These explanations are neither mutually exclusive nor exhaustive. Both are potential topics for future research.
Implications for understanding awareness of affordances
Overall, the results of the current study show that choices about how to configure stepping-stone paths for the purpose of crossing a given space reflect the constraints under which the task of crossing is to be performed. When task constraints emphasised the practicality or expediency of the to-be-created path, paths were relatively linear. Moreover, when task constraints emphasised minimising time taken to cross the space, fewer mats were placed farther apart. When task constraints emphasised enjoyment of use (“fun”), paths were curvilinear, covered a larger area (in terms of total length and maximum width), and exhibited greater variability in distance and direction between mats (see Figures 3 and 4).
By definition, a stepping-stone configuration requires (a relationship among) multiple individual stepping-stones. Each individual stepping-stone, of course, affords certain behaviours (e.g., stepping on, jumping on, picking up, placing, carrying), each of which emerges from the relation between the set of action capabilities of the user and the set of properties of a given stone. Insofar as the affordances of any given individual stone are independent from those of any other stone, they can be described as “lower-order affordances.” However, a configuration of stepping-stones affords a unique set of behaviours (e.g., stepping or jumping to or from, crossing an expanse) that emerge from a more complex set of relations that includes—but is not limited to—the affordances of each stone. To the extent that the affordances of a configuration of stepping-stones depend on relations among lower-order affordances, they can be described as “higher-order affordances” (Wagman et al., 2016, 2023). Previous studies have shown that people are aware of higher-order affordances of a given surface layout both for themselves and for others, and that such affordances include (or at least reflect) contextual factors, such as goals for which or constraints under which a given behaviour is to be performed (Wagman et al., 2019, 2023); Moreover, these studies have shown that people can successfully exploit lower order affordances in the process of bringing higher-order affordances into existence (Mangalam et al., 2019; Wagman et al., 2016).
The results of the study reported here are consistent with these findings. That is, they suggest that participants exploited the lower-order affordances of individual stepping-stones in the process of bringing the higher-order affordances of a configuration of stepping-stones into existence. Likewise, they suggest that participants exploited the higher-order affordances of a configuration of stepping-stones in the process of bringing lower-order affordances of a given stepping-stone into existence. What is particularly intriguing about studies such as these is that they raise the possibilities that (1) people can be aware of higher-order affordances of a to-be-created object or a to-be-created surface layout, (2) higher-order affordances include (or reflect) contextual factors, and (3) people can exploit the lower-order affordances of both tools and raw materials to bring such higher-order affordances into existence. Accordingly, creativity can be conceptualised as the detection and exploitation of the higher-order affordances that emerge from lower order affordances under a given set of circumstances (see Baber, 2021; Ingold, 2013; Withagen & van der Kamp, 2018).
Implications for the design of stepping-stone paths
The question of how people choose to configure stepping-stone paths is an especially interesting one given that stepping-stone configurations designed for play or exercise tend to be standardised (just like most play or exercise equipment). Yet studies have shown that children prefer to play on non-standardised stepping-stone configurations. In part, they do so because they find non-standardised stepping-stone configurations more fun to use (Jeschke et al., 2022; Sporrel et al., 2017). In addition, other studies have shown that when given the chance to create a stepping-stone configuration to use in either exercise or play, both adults and children create non-standardised configurations that nonetheless reflect their action capabilities (Jeschke et al., 2020; Jongeneel et al.., 2015). These results provide converging evidence that non-standardised stepping-stone configurations are more likely to be used for the purposes of play or exercise than standardised stepping-stone configurations. These results suggest that the specific design of stepping-stone configurations may encourage or discourage people to use them for these purposes (see Jongeneel et al., 2015; Sporrel et al., 2017).
The current study builds on these findings by investigating how people choose to make a stepping-stone configuration to be used for a different purpose—as a path for locomotion across a given a space—under different task constraints. The results showed that people created different stepping-stone path configurations under different constraints on the crossing task. As described above, when people created stepping-stone paths that they could use to cross a space quickly, they placed fewer stones farther apart, and when they created a path that would be fun to use to cross a space, they used more stones, placed those stones farther apart, and varied both the distance and direction of consecutive stones, thereby creating non-linear paths that covered large amounts of space. These results suggest that the design of stepping-stone configurations may encourage people to use them to cross a space in specific way or to have a particular subjective experience while crossing a given space.
For example, a stepping-stone path with fewer stones placed farther apart might encourage a person to cross a space quickly, whereas a path with more stones placed closer together might encourage a person to cross a space carefully (or comfortably). And consistent with previous research (Jeschke et al., 2020, 2022; Jongeneel et al., 2015; Sporrel et al., 2017), a non-linear and non-standardised path might encourage a person to cross crossing a space playfully or with enjoyment.
Designing a stepping-stone path in this way may encourage people to use an existing path rather create their own path through a particular space. Alternatively, designers might accommodate the preferences of users of a stepping-stone path by turning emergent preferred configurations into more permanent configurations in the same way that urban planners sometimes accommodate the preferences of pedestrians in turning so-called “desire paths” into paved walkways.
Footnotes
Acknowledgements
The authors thank Rob Withagen for helpful discussions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.