
Abstract
When the size of visual objects matches the size of the response required to perform the task, a potentiation effect has been reported, with faster responses in compatible than incompatible situations. Size compatibility effects have been taken as evidence of close perception-action interrelations. However, it is still unclear whether the effect arises from abstract coding of the size of stimulus and response or from the evocation of grasp affordances from visual objects. We aimed to disentangle the two interpretations. Two groups of 40 young adults categorised small and large objects presented in standardised size as natural or artefact objects. One group categorised manipulable objects that may be associated with small or large size properties and evoke power or precision grasp affordances. The other group categorised non-manipulable objects that may only be associated with small or large size properties. Categorisation responses were made by reaching and grasping a monotonic cylindric device with a power or precision grip in a grasping condition and with large or small touch responses in a control condition. Compatibility effects were found in both grasping and control conditions, independently of the manipulability or category of objects. Participants were faster when the size of the expected response matched the size of the object than when they mismatched, especially for power grasps or whole-hand touch responses. Overall findings support the abstract coding hypothesis and suggest that compatibility between the conceptual size of the object and the size of the hand response is sufficient to facilitate semantic categorisation judgements.
Keywords
Introduction
When perceiving objects, we also perceive the possibilities of action they offer, their affordances, as initially described in the ecological approach of perception (Gibson, 1977). In cognitive psychology, some authors have conceptualised the different action components that objects afford as micro-affordances (Ellis & Tucker, 2000). Micro-affordances may correspond to the hand effector (left and right), the wrist orientation, and the grasp size (power grasp and precision grasp) that would be adapted to grasp the object depending on its position in space, orientation, and size (Bub et al., 2015; Tucker & Ellis, 1998). Compatibility effects between visual object properties and response components have been taken as evidence of the existence of micro-affordances by the proponents of this view. In the seminal versions of the stimulus–response compatibility paradigm, graspable visual objects (e.g., a pan) are presented with their handles oriented to the left or to the right, and participants have to categorise objects by pressing response keys with their left or right hand. When the responding hand is compatible with the orientation of the handle of the object, reaction times are shorter than when they are incompatible, even though the perception of the action properties of the object is not necessary for the task (e.g., upright versus inverted object categorisation). Similar compatibility effects have been reported for the grasp size micro-affordance: participants are faster to categorise small and large manipulable objects on a device using precision grasp and power grasp responses when the response grasp is compatible with object size (Derbyshire et al., 2006; Ellis & Tucker, 2000). Overall, the existence of such compatibility effects as been taken as evidence of automatic evocation of micro-affordances from visual objects.
However, alternative interpretations of compatibility effects may be proposed. Compatibility effects may not be solely explained by the evocation of affordances but could be due to the coding of object visual and/or spatial properties in a non-motor format, such as in the form of an abstract (Azaad et al., 2019; Proctor et al., 1990) or distal (Hommel, 2019; Hommel et al., 2001) code. Object stimuli may activate abstract properties related to their size, such as [small] or [large] or to their position in space, such as [left] or [right]. Similarly, the response may be coded in an abstract manner in terms of [small], [large], [left], [right] response options. When the abstract properties of the stimuli match the abstract coding of the response, response times (RTs) are shorter than when they mismatch, without any affordance evoked. Several studies assessing compatibility effects between left-/right-object position and left-/right-hand effector support the abstract coding interpretation (Cho & Proctor, 2010; Kornblum et al., 1990; Pellicano et al., 2017; Proctor et al., 1990; Proctor & Miles, 2014). In Cho and Proctor’s (2010) study, participants were shown photographs of green and red pans with their handles oriented to the left or right. Participants had to judge the colour or orientation (upright or inverted) of the target pan by responding with their left and right hands. A spatial compatibility effect is reported, consistent with the evocation of the hand effector affordance. Importantly, a similar compatibility effect was found when the pan handles were broken, when participants responded with the index and middle finger of their right hand, and when pans were replaced by circles. The compatibility effect was only greater for pans than circles when circles were small. Overall, results indicate that when viewing handled objects, abstract coding could give rise to the compatibility effect observed between the object location and the hand used for the response, in addition or alternatively to affordance evocation.
Recently, a few studies provided a more nuanced view and highlighted spatial compatibility effects consistent with affordance evocation in a few circumscribed situations. Bub et al. (2021) presented pictures of handled objects displayed in different orientations. Handles could be oriented to the left or right and graspable horizontally (e.g., a pan) or vertically (e.g., a mug). Different pictures of arrow pointing to the left/right or hand grasping vertically/horizontally were superimposed on the handled object pictures. Participants were asked to judge the superimposed arrow or hand orientation using left/right keypresses or vertical/horizontal grasp responses. They investigated the compatibility effect between the different handled objects’ orientation (left/right handle) and response position (left/right response). Overall, positive compatibility effects (faster reaction times when stimuli and response types were aligned) were found only in a few situations, namely when participants responded to arrows by performing horizontal or vertical grasps on the device and when they responded to pictures of hands displayed in an egocentric perspective. This suggests that when task demands are sufficiently relevant for action, micro-affordances related to hand effector and wrist orientation may be additionally evoked when processing visual objects and facilitate the performance of a compatible response. Similarly, Saccone et al. (2016) experimentally dissociated compatibility based on spatial coding versus affordance evocation and found that both could be involved in the compatibility effects observed between object and response position. They argued that both abstract coding and affordance evocation may be at play during object perception, a position shared by other authors, such as Pappas (2014). They showed that in contrast to silhouettes of objects, object photographs induced compatibility effects with object orientation only for between-hand responses, suggesting that silhouettes elicit abstract coding while photographs elicit affordance evocation. The results later obtained by Proctor et al. (2017) nuanced this conclusion and indicated the distinction may also depend on the way objects are centred. Nonetheless, they seem compatible with the view that in particular situations, visual objects evoke grasp affordances, in addition to abstract (spatial) codes. Yet the respective weight of each process in the emergence of compatibility effects remains poorly defined. In addition, the abstract coding hypothesis has been proposed as a general alternative interpretation to the affordance evocation hypothesis based on compatibility effects between object position and response hand. The generalisation of the debate to other micro-affordances, such as the type of grasp used in relation to object size has only received very limited consideration.
To our knowledge, only a few very recent studies explicitly evaluated whether abstract coding of object size may be sufficient to induce compatibility effects between the size of visual objects and grasp responses (Guerineau et al., 2022; Harrak et al., 2022; Heurley et al., 2020; Pecher et al., 2019). In the work of Heurley et al. (2020), black and white pictures of small and large fruit, and vegetable items that may be graspable with a power or a precision grasp were presented in their actual size. Then, the object turned orange or blue, and participants had to determine which colour the target object changed into. Depending on the experiment, participants provided their response by pressing large or small switches with whole-hand or single-finger presses such as the size of the switch and/or the size of the effector would be coded as [large] or [small]. Overall, they found faster colour judgements when the size of the object was compatible with the size of the switch, regardless of the size of the effector. Results demonstrate that when judging the colour of natural manipulable objects, abstract coding of the size of the response switch is sufficient to induce compatibility effects with object size. Therefore, grasp affordance evocation may not be necessarily at play during visual object processing.
Heurley et al. (2020) and more recently Harrak et al. (2022) provided evidence for abstract coding of the size of the response device in compatibility paradigms, but not for abstract coding of the size of the stimulus. While both may contribute to compatibility effects, the sole demonstration of abstract coding of device size does not directly contradict the hypothesis that the perception of manipulable objects evokes grasp affordances. In addition, the stimuli and task used in these experiments are probably not propitious to affordance evocation. Colour judgements are strongly action-irrelevant and recent action priming results suggest that although fruit and vegetables are manipulable objects, visual presentation of natural manipulable objects may not evoke grasps as much as manufactured manipulable objects (Godard et al., 2019). Moreover, several studies indicate that reach-and-grasp responses are more inclined (if not necessary) to elicit the evocation of action components from visual objects (e.g., Bub et al., 2018; Girardi et al., 2010). Interestingly, Matheson and Thompson-Schill (2019) also stressed the importance of the task rather than prior motor experience with objects in the emergence of compatibility effects, at least with object position. In their study, participants were trained to learn conceptual information about novel tools without manipulating the objects (spatial group) or by using them (manipulability group). They then performed conceptual and orientation judgements on objects by pressing keys that were compatible with the position of the grasping part or the position of the functional end of the object. Regardless of the training group, compatibility effects were found with the functional end in the conceptual task but with the grasping part in the orientation task. Together, previous findings are not conclusive about the relative contribution of abstract coding of object size and evocation of grasp affordance from object presentation in the emergence of compatibility effects, especially when task demands should a priori favour the evocation of micro-affordances.
The aim of the present study was then to determine whether compatibility effects with object size may be observed in action-relevant task contexts when the response device prevents size coding of the different grasping parts. We further sought to disentangle the role of affordance evocation and abstract coding of stimulus size in the emergence of compatibility effects between object size and grasp responses. To do so, we compared precision and power grasp responses with small and large natural and manufactured objects that can be manipulable (fruit, vegetables, tools, and utensils) or non-manipulable (animals, trees, furniture, and vehicles). While small and large manipulable objects may evoke precision and power grasps (affordance evocation hypothesis) as well as entail coding of their size properties in terms of [small] and [large] objects (abstract coding view), small and large non-manipulable objects may only involve abstract coding of their size, as non-manipulable objects do not afford grasping. The design of the response device, although compatible with both power and precision grasps, did not show distinct large and small visual parts.
A similar rationale has been used in the examination of spatial compatibility effects and the comparison between animals and tools oriented to the left or to the right has been fruitful to highlight the involvement of left/right abstract coding in spatial compatibility effects (Matheson et al., 2014). The same reasoning was applied here to grasp compatibility effects with object size for which contamination by abstract coding of stimulus size is not established. Importantly, participants had to perform a semantic categorisation task and determine whether objects were natural or manufactured objects by performing reach-and-grasp actions or simple touch responses on a device. Activation of the premotor cortex during object perception is particularly visible during natural/manufactured semantic categorisation (Gerlach et al., 2002), suggesting that this task is well suited to highlight affordance evocation from visual objects, if appropriate.
In this paradigm, participants should be faster to respond to objects that are compatible in size with the size of the grasp used for the response: we expect shorter reaction times for precision grasp than power grasp responses for small objects and shorter reaction times for power grasp than precision grasp responses for large objects. If visual objects evoked micro-affordances, size compatibility effects should be greater (if not exclusively present) for manipulable objects, in particular manipulable artefacts. Recent evidence from action priming indeed suggested that affordance evocation effects may be stronger for manipulable artefacts than manipulable natural objects (Godard et al., 2019). Such an advantage for manipulable artefacts should not be observed if stimulus size is coded in an abstract manner. The role of abstract coding of response size in the emergence of compatibility effects was further evaluated in a control condition. Although the design of the device did not allow size coding of the response parts, it did not prevent the participant to anticipate different magnitudes of action effects (i.e., responding with a power grasp gives more sensorial feedback than responding with a precision grasp), which may also contribute to compatibility effects (Guerineau et al., 2022). The control condition required to respond to the categorisation task on the same device with two distinct touch responses, one involving a large haptic feedback and one involving a small haptic feedback. If the magnitude of the sensorial consequences of the actions is sufficient to elicit stimulus response compatibility with object size with our device, then compatibility effects should be found regardless of stimulus manipulability in the control condition where there is no actual grasp response.
Methods
Participants
One hundred and two young adults between 18 and 40 years old participated in the study for a final sample size of 80 participants (see justification below). They were right-handed according to the Oldfield Edinburgh test (Oldfield, 1971), with normal or corrected to normal vision. The experiment required the participants to be familiar with the object exemplars proposed. Given that the familiarity with object exemplars is very culturally driven, only participants living in France were recruited. The recruitment took place on the campus of the University of Lille and was conducted in accordance with the ethical principles of the Helsinki declaration of 1964, revised in Edinburgh in 2000. The Ethical Committee of the University of Lille has further approved the protocol (reference no. 2022-573-S102).
Justification of the number of participants
Mixed-effect models were used to take into account by-subject and by-item adjustments in data analyses. Power analyses are not trivial for mixed-effect models. Recently, simulation-based power analysis procedures have been introduced to estimate power in complex mixed-effect designs. We applied the procedure presented in the work of Kumle et al. (2021) on a preliminary data set using the function R2power of the package mixedpower (v0.1.0; Kumle et al., 2021) on R Statistical Software v4.1.2; R Core Team 2021).
The objective was to determine the number of participants and the number of trials per condition per participant that would be sufficient to detect a compatibility effect between stimulus size and grasp response, if it exists. We based our simulation on preliminary data obtained from 29 participants on one block of trials (only manipulable objects presented once). Preliminary data are provided in online Supplementary Material 1. We focussed on total movement times (initiation + execution) for the power analysis. The trimming procedure and mixed-model structure applied on this preliminary data were the same as the one planned for the present study (see “Data pre-processing” and “Data analyses” sections). The principle is to simulate new data sets based on preliminary data, analyse each data set and evaluate the statistical significance, and compute power based on the proportion of significant tests among all simulations.
Results of the simulation procedure (1,000 simulations) for different sample sizes in terms of participants and items 1 showed that 40 participants in each group (40 categorising manipulable objects and 40 categorising non-manipulable objects) and 30 trials per object category × object size condition were sufficient to detect a size compatibility effect with power > 0.80.
Stimuli
Stimuli were colour photographs of 80 objects presented on a black background (Figure 1). Objects were presented in a standardised size: the objects were fitted in a 500 × 500 pixels square and centred on a black background of 1,920 × 1,080 pixels. Among the 80 objects, 40 objects were natural objects (e.g., an apple) and 40 were artefacts (e.g., a bowl). In each category, there was 10 small manipulable objects (e.g., coin, raspberry), 10 large manipulable objects (e.g., book, apple), 10 small non-manipulable objects (e.g., USB female port, ant), and 10 large non-manipulable objects (e.g., church, horse). While the size of manipulable objects may be associated with one of two abstract visual properties, [small] or [large], as well as with one of two different grasps, precision grasp or power grasp, the size of non-manipulable objects may be solely associated with abstract visual properties, [small] or [large]. We verified that the size properties of objects were typically associated with the object concepts selected in property generation norms (e.g., Mcrae et al., 2005) to ensure that objects chosen had [large] and [small] visual properties as part of their conceptual representation. Eight additional object photographs were used for practice trials. The complete list of stimuli can be found in online Supplementary Material 2A.
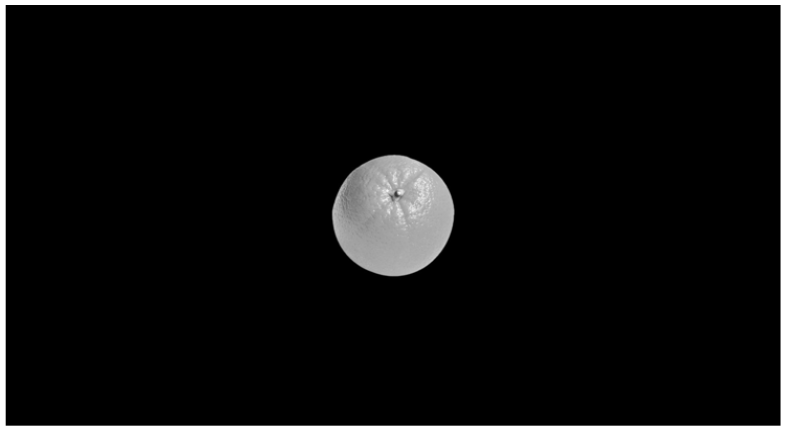
Example of object stimuli (in colour in the actual experiment).
Pre-test of the stimuli
Object category, manipulability and size were verified in a pre-test on 14 participants. The 88 object pictures (80 critical + 8 example pictures) were randomly presented. Pictures were presented in a standardised size, as they were presented during the main experiment. For each picture, participants had to determine whether the object was natural or artefact and to rate on 5-point Likert-type item scales to what extent the object was manipulable (from 1 = not manipulable to 5 = highly manipulable) and the size of the object (from 1 = very small to 5 = very large). All objects were overall correctly identified as natural or artefact (minimum 11/14 responses for each picture). In addition, manipulable objects (median = 5) were judged more manipulable than non-manipulable objects (median = 1.5, W = 1, p < .001). Importantly, large manipulable objects (median = 2) were judged larger than small manipulable objects (median = 1, W = 54, p < .001). Similarly, large non-manipulable objects (median = 4.25) were judged larger than small non-manipulable objects (median = 2, W = 0, p < .001). Therefore, we can be confident that objects may be coded according to their small or large size in both manipulable and non-manipulable object categories.
Response device
Participants performed judgements on objects by responding on a specific response device created for the present study (Figure 2). The response device is constituted of a horizontal base and a vertical cylinder. There is a sensor on the base and two sensors on the cylinder, one on the superior half and the other on the inferior half. The base sensor records initiation times while the sensors on the cylinder record grasping execution times. After positioning their index on the base of the device, participants responded to the categorisation task with their right hand by performing grasping or touch responses. In the grasping condition, they performed a power grasp (whole-hand grasp of the entire cylinder) or a precision grasp (thumb and index finger grasp of the superior half of the cylinder). In the control condition, they executed a whole-hand touch response using the back of the hand or a one-finger touch response using the back of the index finger. A single press on the superior sensor was considered as a precision grasp or a one-finger touch response. Two simultaneous presses on both inferior and superior sensors were considered as a power grasp or a whole-hand touch response depending on the condition. Release from the horizontal base was considered as movement initiation.

Picture of the response device.
It is important to note that the structure of this device did not allow abstract coding of the response keys in terms of [small] or [large], unlike most previous studies on size compatibility effects (Derbyshire et al., 2006; Ellis & Tucker, 2000). Indeed, power and precision grasp responses were made on the same monotonic cylinder and not on visually distinct large and small parts. This is especially important given that Heurley et al. (2020) showed that abstract coding of the size of the response keys may be responsible of compatibility effects with stimulus size.
Procedure
An information letter was sent to participants prior to the testing to present the aim of the study and inform about their rights. Participants were seated approximately 60 cm from the screen. The investigator explained again the content of the information letter and was asked whether the participant agreed to participate in the experiment. Consent was provided orally. Once the consent was obtained, an anonymous code (ascending number) was attributed to each participant.
The experiment was coded using E-Prime 3.0 software (Psychology Software Tools, Pittsburgh, PA). The images were presented on an LCD screen (1,920 × 1,080 pixels, 120 Hz). Participants had to determine whether the object was a natural or artefact object. The task has been chosen in the light of previous studies on affordance evocation (e.g., Gerlach et al., 2002; Tucker & Ellis, 2001) with the aim of involving a certain level of semantic processing of the stimuli, in contrast to judgements irrelevant to object identity (e.g., artificial colour, vertical orientation). The programme displayed the instructions of the task, which were reviewed orally by the experimenter. The task started when the participant was ready.
Each trial started with a sentence requiring participants to get into the initial position with their index on the base of the device. Once in the initial position, a fixation cross appeared for a variable duration of 500, 750, or 1,000 ms. The object was then presented. Half of the participants saw only manipulable objects and the other half saw only non-manipulable objects. The participants had to determine whether the object was a natural or artefact object as fast and accurately as possible by performing two different reach-and-grasps (grasping condition) or two different touch responses (control condition). In each group, half of the participants answered with a power grasp or a whole-hand touch response if the object was natural and a precision grasp or a one-finger touch response if the object was an artefact and conversely for the other half of the participants. In addition, the participants needed to keep pressing the cylinder until the object disappears 3 s later (Figure 3). Then another trial began, indicating to get back to the initial position.
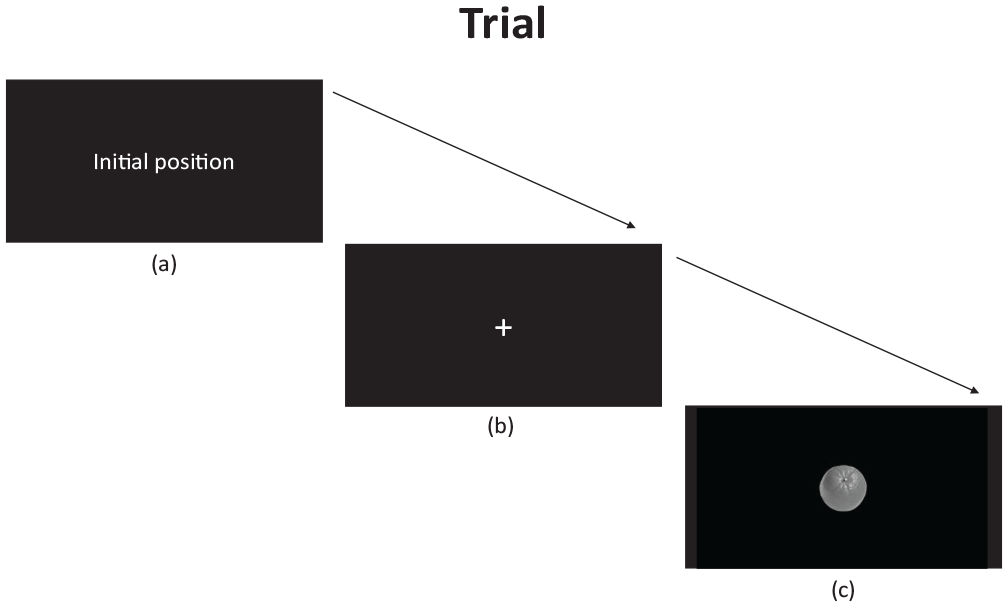
Schematic representation of a typical trial. (a) Instruction to go to initial position. (b) The fixation cross appeared for 500, 700 or 1,000 ms. (c) One of the images appeared and participants had to grasp or touch the device as quickly and accurately as possible. They had up to 3,000 ms to respond before the program moved to the next trial.
For each group and each response condition (grasping, control), three blocks of 40 trials were proposed, each object being presented three times, once in each block, for a total of 120 trials. The order of the trials was randomised within blocks and the order of the grasping and control conditions was counterbalanced between subjects in each group. Short breaks were proposed halfway between blocks. At the end of the task, a debriefing of the experiment and a reminder of the contact details of the research coordinators were given. The total duration of the experiment was around 50 min with 10 min of instructions, 22 min of task, about 10 min of breaks, and 5 min of debriefing.
Data exclusion
Data from a given participant were excluded if more than one-third of the data (one block of trials) was missing due to a technical error (e.g., a computer crash) or if for any reason the participant did not want to finish the experiment. In case of data exclusion, a new participant was recruited and tested until the sample size determined a priori was reached (n = 80).
Data management
No identifying personal data were collected for this study. The researchers collected experimental data for accuracy and RTs associated with the anonymous codes of participants inserted in the E-Prime software. Only collaborators of the study had access to the data. The anonymous data files were stored on a dedicated computer and external hard drives of the investigators and scientific supervisors.
Data pre-processing
Data pre-processing and analyses were conducted with R software using the packages plyr (v1.8.6; Wickham, 2011), tidyverse (v1.3.1; Wickham et al., 2019), lme4 (v1.1-27.1; Bates, Mächler, et al., 2015), afex (v1.0-1; Singmann et al., 2015), broom.mixed (v0.2.7, Bolker et al., 2021), emmeans (v1.7.2; Lenth et al., 2018), and lmerTest (v3.1-3; Kuznetsova et al., 2017).
Errors were first identified in the data set. True errors were considered as a wrong response key (error rate of 5%) or, in case of a power grasp, a difference of more than 100 ms between the two presses on the superior and inferior halves of the grasping part of the device (error rate of 3%). Specifically, two presses made less than 100 ms apart (considered as a very minimum for a simple reaction time, see, e.g., Woods et al., 2015) were considered as one response whereas two presses made more than 100 ms apart were considered two distinct actions. RT trimming was then performed on correct trials. Three RTs were considered: the latency from stimulus presentation to finger release from starting position, i.e., initiation RTs, the latency from release to device grasp, i.e., movement RTs, and the sum of initiation and movement RTs, i.e., total RTs. Several authors showed evocation of action components by analysing initiation and movement times (Bub et al., 2018; Girardi et al., 2010). Considering both measures gave us the opportunity to analyse compatibility effects separately for initiation and movement times (in addition to total RTs), which provided an additional possibility to disentangle the influence of abstract size coding and affordance evocation. Affordance effects have been mostly reported on initiation times (Garofalo et al., 2021; Garofalo & Riggio, 2022; Iani et al., 2011; Jax & Buxbaum, 2010) suggesting that the dissociation between manipulable and non-manipulable objects should be mostly visible during the planning phase of the grasping movement. In contrast, abstract coding of the size of the stimulus and/or the response may rather affect movement times, regardless of stimulus manipulability. This prediction is in line with proposals assuming that separate object characteristics are considered for the planning versus online control of actions (e.g., Glover, 2004), although this may not directly apply to non-visible size properties.
We first applied a general superior cut-off on total RTs to remove potential extreme responses by excluding total RTs longer than 2,000 ms. We also applied an inferior cut-off on initiation RTs by excluding initiation RTs shorter than 100 ms (for the same reason as explained above). With this procedure, 13.76% of trials were removed and three participants with initiation RTs all shorter than 100 ms were excluded. We then checked the number of remaining trials per participant. Sixteen participants with more than 25% of missing trials were excluded. Then, a trimming for each subject in each condition was conducted on initiation RTs, movement RTs and total RTs, excluding RTs inferior or superior to 3 standard deviations from the mean of the subject in a given condition. This removed 2.77% of the trials. After trimming, we checked again the number of trials per participant and excluded three participants with more than 25% of missing trials.
Finally, we verified the presence of outlier participants on accuracy and/or RTs. We considered outlier participants who performed at chance level (accuracy < 52%) or participants with individual mean accuracy inferior to 3 standard deviations from the mean accuracy of the whole sample. Similarly, participants with individual mean total RTs inferior or superior to 3 standard deviations from the mean total RTs of the whole sample were considered outliers. No additional outlier participants were identified on accuracy nor on RTs. As the accuracy was at ceiling (for true errors, M = 0.953; SD = 0.210), it was not further analysed.
Data analyses
We wanted to evaluate the presence of compatibility effects and whether their amplitude could be modulated by stimulus manipulability in each task (grasping or control). As direct comparison between the two tasks was not necessary regarding the hypotheses tested, RT analyses were conducted separately for the control and grasping tasks on three dependent variables: trimmed correct initiation RTs, trimmed correct movement RTs, and trimmed correct total RTs. We used linear mixed models to analyse trimmed correct RTs as a function of the following fixed effect factors: (i) manipulability (manipulable or non-manipulable objects) as a between-subject factor and (ii) object size (small or large), (iii) expected response (power grasp or precision grasp for the grasping task and whole-hand or one-finger touch response for the control task), and (iv) category (natural or artefact objects) as within-subject factors. The models also included items (objects) and participants as random effect factors to take into account differences between participants/items in the model. After verifying the model residuals, a log transformation was applied on initiation, movement and total RTs as the distribution of the residuals was largely skewed and deviated from the normal distribution.
We chose the maximal random effect structure supported by the data and the model, including random intercepts and random slopes for participants and items when possible. When the model with the maximal random effect structure did not converge, we employed theoretical and empirical considerations to reduce the random effect structure. From a theoretical standpoint, we kept random slopes corresponding to the fixed effects that are the most important regarding our hypotheses. From an empirical point of view, random slopes that did not significantly improve the model fit in a model comparison approach were removed, as recommended by Bates et al. (2015). The random effect structure included at minimum random intercepts for both subjects and items. The complete mixed-effect model structures can be found in online Supplementary Material 2B. The summary tables of mean and standard deviation of all effects for the three RT measures and the two response conditions can be found in Supplementary Material 2C.
In the grasping condition, we expected an interaction between expected response, object size, manipulability, and possibly category. Overall, we expected a compatibility effect with shorter RTs for power grasp responses for large objects in comparison with small objects and shorter RTs for precision grasp responses for small objects in comparison with large objects. Following the affordance evocation hypothesis, we assumed that the compatibility effect would be greater for manipulable objects in comparison with non-manipulable objects, and possibly more pronounced for manipulable artefact objects. These effects should be reflected on initiation RTs as affordances effects have been mostly reported on initiation times corresponding to the planning phase of the grasping movement. In the control condition, compatibility effects could only result from coding the size of the response, especially the magnitude of the sensorial consequences of the hand action. Thus, we expected an interaction between expected response and size of object independently of the manipulability in this condition. RTs should be shorter for whole-hand touch responses for large objects in comparison with small objects and faster for one-finger touch responses for small objects in comparison with large objects, for both manipulable and non-manipulable objects. These effects should not necessarily be reflected on initiation times.
Results
The descriptive statistics including mean and standard deviation of the different measures in the manipulability × object size × expected response × category conditions are provided in online Supplementary Material 2C.
Grasping condition
We did not find the expected interactions of the factors of interest with object manipulability in the grasping condition. The four-way interaction between expected response, object size, manipulability, and category was not significant, regardless of the measure: initiation RTs (estimate = 0.009, t = 0.942, SE = 0.009, p = .34), movement RTs (estimate = –0.001, t = –0.129, SE = 0.008, p = .89), or total RTs (estimate = 0.003, t = 0.408, SE = 0.0075, p = .68). Similarly, the three-way interaction between expected response, object size of object, and manipulability was not significant on initiation RTs (estimate = 0.000, t = 0.075, SE = 0.006, p = .94), movement RTs (estimate = –0.002, t = –0.370, SE = 0.006, p = .71), or total RTs (estimate = –0.013, t = –0.300, SE = 0.004, p = .76).
However, we observed a significant interaction between expected response and object size on all three measures, including initiation RTs (estimate = –0.012, t = –2.630, SE = 0.004, p < .01), movement RTs (estimate = –0.026, t = –6.062, SE = 0.004, p < .001), and total RTs (estimate = –0.019, t = –6.180, SE = 0.003, p < .001). This interaction highlights an overall compatibility effect between stimulus and response size, regardless of object manipulability or category (Figure 4). Paired comparisons on initiation RTs showed that the compatibility effect was mostly driven by power grasp responses with faster initiation RTs for power grasp responses when objects were large (M = 422, SD = 86) in comparison with small (M = 434, SD = 89; estimate = –0.021, z = –2.728, SE = 0.007, p < .01). For precision grasp responses, the initiation RTs for small objects (M = 432, SD = 92) did not differ from large objects (M = 433, SD = 96; estimate = –0.004, z = 0.525, SE = 0.007, p = .59). The same pattern was found on total RTs: total RTs were significantly faster when power grasps were performed on large objects (M = 848, SD = 125) in comparison with small objects (M = 875, SD = 132; estimate = –0.027, z = –4.431, SE = 0.006, p < .001). For precision grasp responses, the advantage of small objects (M = 828, SD = 136) in comparison with large objects (M = 836, SD = 130) was not significant (estimate = –0.010, t = 1.695, SE = 0.006, p = .09). On movement RTs, the compatibility effect was more symmetrical: power grasp responses were faster for large objects (M = 425, SD = 109) than small objects (M = 441, SD = 110; estimate = –0.033, z = –4.264, SE = 0.007, p < .001). In addition, for precision grasp responses, initiation RTs where faster for small objects (M = 396, SD = 100) than large objects (M = 402, SD = 98; estimate = –0.019, z = 2.620, SE = 0.007, p < .01).
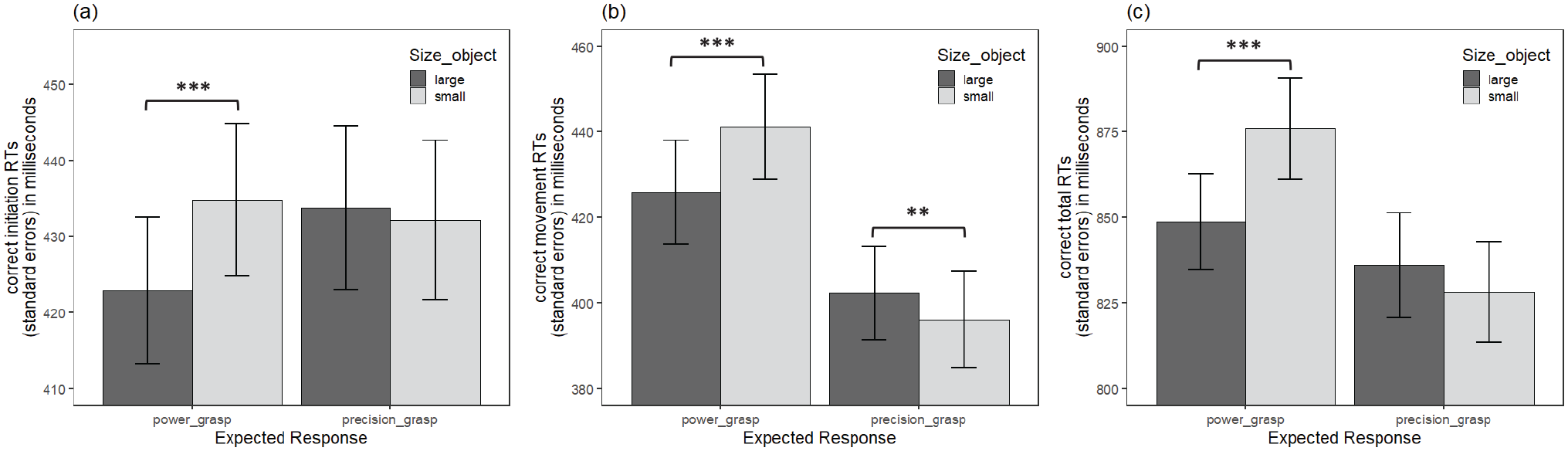
Mean (a) initiation RTs, (b) movement RTs, and (c) total RTs as a function of expected response and object size for the grasping condition.
Results also indicated several main effects. There was a main effect of category on initiation RTs (estimate = –0.036, t = –5.098, SE = 0.005, p < .001) with faster initiation RTs for natural (M = 417, SD = 82) than artefact objects (M = 442, SD = 95), on total RTs (estimate = –0.027, t = –4.397, SE = 0.006, p < .001) with faster total RTs for natural (M = 828, SD = 122) than artefact objects (M = 862, SD = 133), but not on movement RTs (estimate = –0.013, t = –1.591, SE = 0.008, p = .11). A main effect of Expected response was also found on movement RTs (estimate = –0.058, t = –7.319, SE = 0.008, p < .001) with faster movement RTs for precision grasps (M = 398, SD = 98) than power grasp responses (M = 432, SD = 108) and on total RTs (estimate = –0.026, t = –5.098, SE = 0.005, p < .001) with faster total RTs for precision grasps (M = 830, SD = 131) than power grasp responses (M = 860, SD = 126). The main effect of Expected Response was not significant on initiation RTs (estimate = 0.004, t = 1.083, SE = 0.004, p = .28).
Control condition
The four-way interaction between expected response, object size, manipulability, and category was not found significant, regardless of the measure: initiation RTs (estimate = –0.006, t = –0.632, SE = 0.009, p = .52), movement RTs (estimate = –0.018, t = –1.611, SE = 0.011, p = .11) or total RTs (estimate = –0.001, t = –1.633, SE = 0.006, p = .10) RTs. In addition, the three-way interaction between expected response, object size, and manipulability was again not significant on initiation RTs (estimate = 0.0003, t = 0.049, SE = 0.006, p = .96), movement RTs (estimate = –0.0004, t = –0.050, SE = 0.007, p = .95) or total RTs (estimate = 0.001, t = 0.211, SE = 0.004, p = .83).
The interaction between expected response and object size was not significant on initiation RTs (estimate = –0.005, t = –1.153, SE = 0.004, p = .24) but was evidenced on movement RTs (estimate = –0.022, t = –3.965, SE = 0.005, p < .001) and total RTs (estimate = –0.012, t = –3.690, SE = 0.003, p < .001). This interaction reflected an overall compatibility effect between touch response and stimulus sizes, at least on the movement part of the response. Paired comparisons indicated that the compatibility effect was mostly driven by whole-hand responses (Figure 5). For whole-hand responses, there were faster movement RTs when objects were large (M = 441, SD = 136) in comparison with small (M = 454, SD = 112; estimate = –0.034, z = –3.878, SE = 0.008, p < .001) and faster total RTs when objects were large (M = 891, SD = 177) in comparison with small (M = 912, SD = 177; estimate = –0.025, z = –3.694, SE = 0.006, p < .001). For one-finger responses, no significant differences were found between small and large objects neither on movement RTs (estimate = 0.011, z = 1.227, SE = 0.009, p = .21) nor on total RTs (estimate = 0.0006, z = 0.104, SE = 0.006, p = .91).
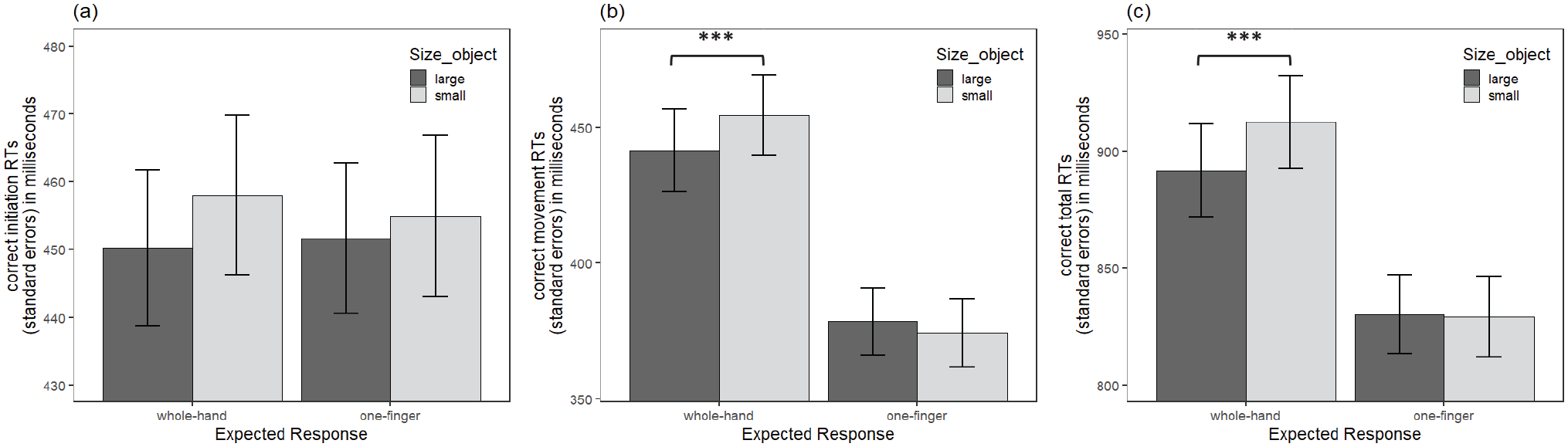
Mean (a) initiation RTs, (b) movement RTs, and (c) total RTs as a function of expected response and object size for the control condition.
Results also indicated a main effect of category on initiation RTs (estimate = –0.027, t = –5.350, SE = 0.005, p < .001) with faster initiation RTs for natural (M = 443, SD = 96) than artefact (M = 463, SD = 105) objects and on total RTs (estimate = –0.017, t = –2.669, SE = 0.006, p < .01) with faster total RTs for natural (M = 857, SD = 154) than artefact (M = 874, SD = 177) objects. This effect was not significant on movement RTs (estimate = –0.0005, t = –0.056, SE = 0.009, p = .95). A main effect of expected response was also found on movement RTs (estimate = –0.12, t = –13.145, SE = 0.009, p < .001) with faster total RTs for one-finger responses (M = 376, SD = 110) in comparison with whole-hand responses (M = 447, SD = 133) and on total RTs (estimate = –0.057, t = –10.159 SE = 0.005, p < .001) with faster total RTs for one-finger responses (M = 829, SD = 149) in comparison with whole-hand responses (M = 901, SD = 175). This effect was not significant on initiation RTs (estimate = 0.001, t = 0.260, SE = 0.004, p = .79). In addition, there was a main effect of object size on total RTs (estimate = 0.008, t = 2.161, SE = 0.003, p = .034) with faster total RTs for large (M = 855, SD = 155) than small objects (M = 864, SD = 156), but the effect was not significant neither on initiation RTs (estimate = 0.007, t = 1.872, SE = 0.004, p = .06) nor on movement RTs (estimate = 0.007, t = 1.600, SE = 0.004, p = .11).
Complementary analyses
In addition to the planned analyses, we tested whether the magnitude of compatibility effects between the grasping and control response within-subject conditions differed. We separated responses to manipulable and non-manipulable objects and ran mixed models with expected response, object size, category, and response condition as fixed effects of interest in each group. The complete mixed-effect model structures can be found in online Supplementary Material 2B. The four-way interaction between expected response, object size, category, and response condition was not significant neither for manipulable objects on none of the measures: initiation RTs (estimate = –0.003, t = –0.328, SE = 0.010, p = .74), movement RTs (estimate = –0.005, t = –0.622, SE = 0.009, p = .53), and total RTs (estimate = –0.003, t = –0.575, SE = 0.006, p = .56), nor for non-manipulable objects on none of the measures: initiation RTs (estimate = 0.012, t = 1.265, SE = 0.009, p = .20), movement RTs (estimate = 0.009, t = 0.896, SE = 0.011, p = .37), and total RTs (estimate = 0.010, t = 1.567, SE = 0.006, p = .11). The three-way interaction between expected response, object size, and response condition was also not significant neither for manipulable objects on none of the measures: initiation RTs (estimate = –0.005, t = –0.726, SE = 0.007, p = .46), movement RTs (estimate = –0.002, t = –0.344, SE = 0.006, p = .73) and total RTs (estimate = –0.003, t = –0.785, SE = 0.004, p = .43), nor for non-manipulable objects on none of the measures: initiation RT (estimate = –0.004, t = –0.629, SE = 0.006, p = .52), movement RTs (estimate = –0.003, t = –0.498, SE = 0.007, p = .61) and total RTs (estimate = –0.006, t = –1.288, SE = 0.004, p = .19).
Discussion
We intended to determine the contribution of grasp affordance evocation and abstract coding of stimulus size in the emergence of compatibility effects between object size and grasp responses. We compared precision and power grasp responses (grasping condition) as well as large or small touch responses (control condition) to small and large natural and manufactured objects that could be manipulable or non-manipulable. Manipulable objects could evoke power and precision grasps, but their size could also be abstractly coded as [large] or [small]. Meanwhile, non-manipulable objects did not afford grasping and could only be abstractly coded as [large] and [small] objects. Therefore, while compatibility effects between the size of the responses and the size of objects could origin from abstract coding of stimulus size for both manipulable and non-manipulable objects regardless of the type of response, grasp affordance evocation may only contribute to compatibility effects for manipulable objects when grasp responses are requested. In the grasping condition, we expected overall faster reaction times for power grasp responses when objects are large in comparison with small and faster reaction times for precision grasp responses when objects are small in comparison with large. If visual objects evoked grasp affordances, compatibility effects were assumed to be greater for manipulable than non-manipulable objects, and more important—if not exclusively present—for grasping responses. If grasp affordances did not participate in compatibility effects with object size, no differences were expected between manipulable and non-manipulable objects and grasping and control response conditions.
Results showed significant compatibility effects, regardless of object manipulability, object category and response condition. For all object types and response conditions, compatibility effects were mostly driven by large responses. In the grasping condition, there were faster reaction times for power grasp responses when the objects were large in comparison with small. This effect was reflected on initiation, movement, and total RTs, independently of object manipulability and category. A similar pattern of results was observed in the control condition with faster movement and total reaction times for whole-hand responses when the objects were large in comparison with small, independently of object manipulability and category.
Overall, our results are in line with the abstract coding hypothesis. Compatibility effects were found independently of stimulus manipulability, suggesting that the evocation of the grasping components of object and response was not necessary to give rise to compatibility effects. Following the work of Heurley et al. (2020), both objects and responses seemed to have solely been abstractly coded as [large] and [small] in our protocol. Absence of affordance evocation is further supported by the absence of modulation of compatibility effects by the category of objects. The results for the control condition also corroborate the hypothesis that compatibility effects did not arise from the facilitation of grasping responses that are congruent with the grasping components evoked by the object. Compatibility effects were found in the control task with touch responses unrelated to the grasps evoked by the objects and independently of object manipulability. Compatibility effects cannot thus be explained by a compatibility between grasping components and suggest a match of size codes between the object and response.
The pattern of compatibility effects was overall similar and consistent on the different measures: initiation, movement, and total RTs. A slight nuance might nonetheless be noted for initiation times that exhibited compatibility effects in the grasping condition but not in the control condition. We predicted that abstract coding of stimulus and response size would preferentially affect movement times while grasp affordance evocation would rather impact initiation times, as most studies targeting grasp affordances in compatibility paradigms reported effects on initiation times (Garofalo et al., 2021; Garofalo & Riggio, 2022; Iani et al., 2011; Jax & Buxbaum, 2010). Yet compatibility effects were visible on initiation times in the grasping condition for both manipulable and non-manipulable objects, inconsistently with the affordance evocation hypothesis. This suggests that coding the response as large or small affects the grasp response from the planning phase, in addition to its later influence on online action control (Glover, 2004).
A second interesting nuance is the restriction of compatibility effects to large responses. We found faster power grasps and whole-hand responses for large in comparison with small objects, but no significant differences between large and small objects for precision grasps and one-finger responses. As compatibility with stimulus size was visible for power grasps and whole-hand responses, the size of the stimuli seems to have been correctly coded as large and small. The absence of effect for precision grasps and one-finger responses could then be linked directly to the response itself. A first hypothesis would be related to the speed of responses, as power grasps were slower to execute than precision grasps on our device. As showed by Bub et al. (2018), the time course of abstract coding and affordance evocation is slightly different, and abstract coding seems to appear later than affordance evocation. This might explain why compatibility effects are mostly driven by slower large responses in our experiment.
An important addition of the present study to the literature on compatibility effects was the possibility to address the contribution of the compatibility between the object and the size of the effector (large/small hand), independently of the size of the response device (large/small key). The compatibility between stimulus and response sizes has been classically demonstrated with both the effector and response devices confounded: large responses are usually made on the large part of the device and, respectively, for small responses (Harrak et al., 2022; Pecher et al., 2019). Therefore, the compatibility effects observed could not be solely attributed to the coding of the size of the effector or the response device. When disentangling effector and device size, Heurley et al. (2020) found a compatibility effect between stimulus and device size but not between stimulus and effector size. In the present study, we bring evidence that when it is not possible to code the response keys in terms of small or large properties (monotonic cylinder), a facilitation can arise solely from the compatibility between stimulus and effector size.
Although results do not support the affordance evocation hypothesis and appear rather consistent with the abstract coding hypothesis, the processes underlying abstract coding of object size remain uncertain. If we consider the works of Heurley et al. (2020) and Proctor et al. (1990), compatibility effects would result from shared abstract codes, with facilitation when the abstract codes of [large] and [small] properties of the stimulus and the response match. According to the theory of event coding (Hommel, 2019; Hommel et al., 2001), common coding of stimulus and response would be achieved in the format of a distal code that would be applied to the dimension of size in the compatibility effects observed here. Recently, Guerineau et al. (2022) proposed an interpretation based on the magnitude of the sensorial consequences of the action to explain compatibility effects with object size. In our protocol, power grasps and whole-hand touches would have been anticipated as large tactile and/or visual feedbacks and precision grasps and one-finger touches as small tactile and/or visual feedbacks. This interpretation would explain the presence of similar compatibility effects in the grasping and control response conditions, although the design of our study does not allow to clearly disentangle between the different processes possibly participating in coding the size of the response from the effector perspective.
Even if the results obtained support the idea that some type of abstract coding of stimulus and effector size leads to compatibility effects in our protocol, it does not completely rule out the possibility of grasp affordance evocation from visual objects. Indeed, our version of the compatibility paradigm was voluntarily highly conservative in terms of stimulus and response device presentation. Stimuli were presented in a standardised size with large and small objects appearing in the same visual size, a size that was then largely different from the real size of objects, to tackle grasp affordance evocation from object conceptual representations rather than from object visual properties, in contrast to classical studies using the paradigm (Derbyshire et al., 2006; Ellis & Tucker, 2000). Moreover, there is now important evidence that affordance evocation is not necessarily automatic and can depend on the relevance of the situation for action. For example, Costantini et al. (2010) and later on Wamain et al. (2016) highlighted that only reachable objects, meaning visual objects presented in individual peri-personal space, evoke affordances. The lack of relative size cues in our protocol may have made the objects look unreachable. Furthermore, the broad semantic task requested on the visual stimuli (natural vs artefact categorisation) could be considered as not highly relevant for action, as compared with object identification or more functional object classifications. We argue that affordance evocation is not automatic and does not contribute to compatibility effects in our specific protocol but might participate in the effect in some situations that require more naturalistic, action-relevant conditions.
In conclusion, we found compatibility effects between object and response sizes, independently of the manipulability and category of objects and independently of the presence of an actual grasping response. When objects are presented in a standardised size, our results indicate that compatibility effects can be solely driven by an abstract coding of the object and the response size. While the results seem in line with an absence of contribution of affordance evocation to compatibility effects with object size in our protocol, the nature of the processes underlying size coding still need to be specified. Finally, we argue that while our findings support the abstract coding hypothesis, they do not rule out the possible contribution of grasp affordance evocation to compatibility effects in more naturalistic, action-relevant situations.
Supplemental Material
sj-docx-1-qjp-10.1177_17470218231161310 – Supplemental material for Stimulus–response compatibility effects during object semantic categorisation: Evocation of grasp affordances or abstract coding of object size?
Supplemental material, sj-docx-1-qjp-10.1177_17470218231161310 for Stimulus–response compatibility effects during object semantic categorisation: Evocation of grasp affordances or abstract coding of object size? by Lilas Haddad, Yannick Wamain and Solène Kalénine in Quarterly Journal of Experimental Psychology
Supplemental Material
sj-xlsx-2-qjp-10.1177_17470218231161310 – Supplemental material for Stimulus–response compatibility effects during object semantic categorisation: Evocation of grasp affordances or abstract coding of object size?
Supplemental material, sj-xlsx-2-qjp-10.1177_17470218231161310 for Stimulus–response compatibility effects during object semantic categorisation: Evocation of grasp affordances or abstract coding of object size? by Lilas Haddad, Yannick Wamain and Solène Kalénine in Quarterly Journal of Experimental Psychology
Footnotes
Acknowledgements
This work benefitted from a PhD fellowship from the University of Lille awarded to the first author. The authors further thank Laurent Ott for helping with experiment programming and Erwan Caron for running the pre-test of the stimuli.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data accessibility statement
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.