
Abstract
When performing a joint action task, we automatically represent the action and/or task constraints of the co-actor with whom we are interacting. Current models suggest that, not only physical similarity, but also abstract, conceptual features shared between self and the interacting partner play a key role in the emergence of joint action effects. Across two experiments, we investigated the influence of the perceived humanness of a robotic agent on the extent to which we integrate the action of that agent into our own action/task representation, as indexed by the Joint Simon Effect (JSE). The presence (vs. absence) of a prior verbal interaction was used to manipulate robot’s perceived humanness. In Experiment 1, using a within-participant design, we had participants perform the joint Go/No-go Simon task with two different robots. Before performing the joint task, one robot engaged in a verbal interaction with the participant and the other robot did not. In Experiment 2, we employed a between-participants design to contrast these two robot conditions as well as a human partner condition. In both experiments, a significant Simon effect emerged during joint action and its amplitude was not modulated by the humanness of the interacting partner. Experiment 2 further showed that the JSE obtained in robot conditions did not differ from that measured in the human partner condition. These findings contradict current theories of joint action mechanisms according to which perceived self-other similarity is a crucial determinant of self-other integration in shared task settings.
Introduction
Over the last two decades, numerous studies have provided evidence that performing a task jointly with another person can influence one’s performance, without intention and awareness (Dolk et al., 2014; Karlinsky et al., 2017). However, when and why these joint action effects occur is still a matter of debate. As artificial systems, such as virtual agents and robots, become increasingly engaged in human lives, an emerging scientific and societal question is whether interacting with artificial agents can induce such joint action effects and whether these effects depend on the human characteristics presented by the co-acting agent. Examining these questions has implications regarding both human–robot interactions and current theorising of the cognitive processes involved in joint action. In turn, specifying joint action phenomena can broaden our understanding of how people represent and interact with others (e.g., Heyes, 2014). The present research aims to further the understanding of joint action mechanisms by investigating whether, in a shared task context, the integration of a humanoid robot’s actions in our own task representation depends on the human-like capabilities exhibited by that agent during prior interaction.
The joint Simon effect (JSE) and its origin
The joint Simon task is a paradigm that has been largely employed in the last decades to investigate how we are influenced by our awareness of the stimulus condition under which another person will produce a response (Sebanz et al., 2003, 2006). This joint action paradigm is a socialised version of the standard Simon task (Simon & Rudell, 1967). In a standard Simon task, participants respond to the identity of a stimulus (e.g., a blue or a green circle) that randomly appears on the right or left side of a display by pressing a left or right response key. Responses are typically faster and more accurate when stimulus location corresponds to the response position (compatible trials) than when it does not (incompatible trials). This so-called Simon effect is thought to arise because, under these task conditions, the task-irrelevant spatial feature of the stimulus activates the response sharing this feature (e.g., a stimulus located on the right triggers the right response code), which creates response facilitation when the locations of stimulus and requested response overlap and response conflict when they do not overlap (Hommel, 2011; Kornblum et al., 1990). Confirming this interpretation in terms of conflict between alternative responses, when the participant gives a single response to only one of the two stimuli, rendering the task a Go/No-go task, the Simon effect is drastically reduced (Ansorge & Wühr, 2004; Davranche et al., 2019; Hommel, 1996; Sebanz et al., 2003). However, a seminal study by Sebanz et al. (2003) found that when such a Go/No-go version of the task is shared with another individual who responds to the other stimulus, the Simon effect is reinstated—the so-called Joint Simon Effect (JSE). The JSE is a well-established phenomenon (for a meta-analysis, see Karlinsky et al., 2017). It has been repeatedly demonstrated in various studies on adults (for a review, see Dolk et al., 2014) as well as in young children (Milward et al., 2014, 2017; Saby et al., 2014). The amplitude of the JSE (i.e., incompatible minus compatible RTs) is typically between 5 and 20 ms (Dolk & Prinz, 2016).
Joint action research has revealed that the size of the JSE is influenced by the social or affective relationship existing between co-actors. Notably, the JSE seems to be accentuated by the reduction of self-other boundaries. It is promoted when the co-actor is friendly (vs. intimidating) (Hommel et al., 2009) and when the members of the dyad are in a cooperative (vs. competitive) mode (Liepelt & Raab, 2021; Ruys & Aarts, 2010). Furthermore, it is more pronounced when participants act jointly with their romantic partner (vs. a friend) (Quintard et al., 2020) or with an in-group (vs. out-group) member (McClung et al., 2013).
As the JSE was originally evidenced in the presence of another active individual, it has been proposed that the effect stems from a dedicated social mechanism. Accordingly, individuals automatically represent the action, task, as well goals and intentions of the co-actor, on top of their own share of the task. Therefore, both left and right responses are represented, which renders the joint Simon task functionally equivalent to the standard (two-choice) Simon task, hence the JSE (Frith, 2012; Sebanz et al., 2005, 2006; Sebanz & Knoblich, 2009). Although this action/task co-representation account accords well with the modulation of joint action effects by social variables, it fails to explain the elicitation of JSE-like phenomena by non-social events. Indeed, experimental work has demonstrated that a JSE can be elicited when the human co-actor is replaced by a dynamic, non-biological object, such as a Japanese waving cat or a metronome (Dolk et al., 2013; Puffe et al., 2017). The finding that JSEs can also be generated by dynamic objects led to the formulation of a more comprehensive referential coding account (Dolk et al., 2014; Klempova & Liepelt, 2016). This account is rooted in the Theory of Event Coding (TEC; Hommel et al., 2001), according to which the cognitive system represents self-produced events (actions) and other perceived events (be they social or not) the same way—that is, through codes of their sensory consequences. In accordance with TEC, the referential coding account posits that, when sharing the Simon task with another individual, representations of the perceptual features of both one’s own and co-actor actions are activated. Because the two action events share several features (effector, speed, sound, etc.), this creates an action-discrimination problem which is assumed to be resolved by referential coding, that is, by emphasising—through intentional weighting (Memelink & Hommel, 2013)—features that discriminates best between the two alternative actions. In the context of the joint Simon task, such a distinctive feature is the spatial location (left or right) of responses. Participants are therefore susceptible to code their response spatially (i.e., as left or right), which reintroduces the dimensional overlap between response and stimuli, setting the conditions for the emergence of a JSE (Dolk et al., 2014; see Dittrich et al., 2012, for a related view). The same logic applies to any sufficiently salient event, regardless of its nature (related to a human agent or not), explaining why JSE-like phenomena can be generated by dynamic objects (Dolk et al., 2013). Moreover, to explain the influence of social variables on the emergence of the JSE, the referential coding approach has been extended to include the role of the social context in shaping response codes (Dolk et al., 2013, 2014; Dolk & Prinz, 2016; Prinz, 2015). A key idea is that agent-related features, including physical characteristics and more abstract/conceptual features, such as identity, motives, or affective state, are integrated to some degree with action representations (Beckers et al., 2002; Hommel, 2019). Therefore, in the context of joint action, the more perceptual or conceptual features are shared between self and other, the greater the discrimination problem should be, resulting in stronger need for referential coding and thus larger JSE (Dolk et al., 2014). Consequently, factors reducing the distinction between self and other, such as interpersonal closeness (Aron & Aron, 1996), shared group membership (Tropp & Wright, 2001) or cooperation (Abele & Stasser, 2008; Deutsch, 2014), should amplify the JSE, and this is indeed what has been found (see above). Referential coding can thus explain via a single mechanism the occurrence of JSE-like phenomena both with humans and objects, as well as its modulation by social factors, which makes it a parsimonious account of the JSE.
It is worth emphasising that the referential coding account and the co-representation account differ on the specificity of the mechanisms they invoke to explain the JSE (see Dolk & Prinz, 2016, for a detailed discussion of the two perspectives). Indeed, the action/task co-representation account suggests that the JSE emerges because we represent the action at the other’s disposal and the related task rules, which leads to a representation of the full task. In other words, we take into account the mental states of the other (Frith, 2012), which makes the hypothesis of action/task co-representation an “implicit mentalizing interpretation” of the JSE (Heyes, 2014). In this perspective, the JSE would reflect domain-specific social cognitive processes, that is, processes selectively engaged by social interactions or stimuli (Barrett, 2012). Alternatively, the referential coding account explains the JSE by invoking the common feature-based coding of self-produced events and perceived events, be they social or not (Dolk et al., 2013, 2014) (see above). In this perspective, the core processes at the origin of the JSE are domain-general cognitive processes that apply to different types of event or stimuli (i.e., irrespective of their social/non-social nature) and operate in both social and non-social contexts. Thus, the question of the origin of the JSE is linked to the more general question of the specificity of the mechanisms underlying social behaviours (Heyes, 2014; Ramsey & Ward, 2020).
Ultimately, irrespective of the precise mechanisms underlying the JSE, it reflects the extent to which we integrate the action of another agent into our own task representation. As such, several studies have used the JSE as an index of self-other integration (e.g., Beaurenaut et al., 2021; Milward & Sebanz, 2016; Quintard et al., 2020; Ruissen & de Bruijn, 2015).
Joint action with a non-human agent: influence of co-actor’s humanness
Humanness refers to attributes (e.g., secondary emotions, agency) that separate humans from animals and machines (Haslam & Loughnan, 2014). Importantly, humanness is a continuum and, the same way we can see our conspecifics as more or less human, there are variations in the extent to which we ascribe human attributes to robots and other artificial agents, influencing how we behave and think in their presence (Hortensius & Cross, 2018; Złotowski et al., 2015). Hence, both for theoretical reasons and with respect to potential implications regarding human–robot interactions, studies have examined the influence of the humanness of the co-actor on the JSE. The first study bearing on this issue employed a virtual version of the joint Go/No-Go Simon task (Tsai & Brass, 2007). Participants responded to their target stimulus while another hand displayed on the screen responded to the alternative stimulus. The virtual hand materialising the co-actor was either a human or non-human (wooden) hand. A significant 10 ms JSE 1 was obtained in the human hand condition, but not in the wooden hand condition.
Most relevant for the present purpose, other work has examined joint action effects when sharing a task with a robotic partner. Stenzel and colleagues (2012) investigated the occurrence of a JSE with a humanoid robot physically present. These authors manipulated participants’ belief about the humanness of the robot’s functional principle. In the human-like condition, participants were instructed that they were interacting with a robot whose behaviour was biologically inspired (i.e., based on a human model). In the machine-like condition, the robot was described as functioning in a purely deterministic manner. A significant 8 ms JSE emerged in the human-like condition, but not in the machine-like condition. This finding suggests that the extent to which participants believe the co-actor possesses human-like attributes is a crucial determinant of the JSE (see also Müller, Brass, et al., 2011). Importantly, this finding has been taken as evidence that the JSE is modulated by the similarity between self and other extending beyond physical appearance, as predicted by the referential coding account and its recent formulations (Dolk et al., 2013, 2014; Dolk & Prinz, 2016; Prinz, 2015).
However, recent studies on joint action with a robotic agent have led to conflicting results. Bunlon et al. (2018) reported a series of experiments using the virtual version of the joint Go/No-Go task in which the task was shared with a virtual robotic vs. human hand. Results revealed a significant JSE which did not differ between robotic and human partner, suggesting that the human visual appearance of the co-actor is not a crucial determinant of the JSE. Whether this limited bottom-up influence of visual cues to humanness on the JSE is specific to virtual settings or extends to real interactions remains an open question. Most importantly, in their study, Bunlon et al. (2018) tested whether the JSE was affected by sensorimotor experience during which participants manipulated the virtual robotic hand via an exoskeleton (vs. passive observation of movements of the robotic hand). Experiencing a correspondence between one’s own movement and that of the robotic hand was hypothesised to increase the perceived similarity with the virtual robotic agent (Meltzoff, 2007; Press, 2011). Results indicated that the JSE was not significantly affected by manipulating the robotic hand prior to joint action performance. Likewise, Heijnen, Kleijn, and Hommel (2019) had participants perform the joint Simon task with a robot, while manipulating the prior experience of behavioural synchrony vs. asynchrony with that robot. Based on previous research (e.g., Valdesolo et al., 2010), the experience of synchrony was assumed to promote self-other similarity. Heijnen et al.’s (2019) results indicated the presence of a significant JSE, but it was not modulated by prior experience of synchrony (vs. asynchrony) with the robot. In a study by Sahaï et al. (2023), participants performed the joint Go/No-Go task with either a human or a humanoid robot. The two partner conditions yielded comparable JSE (≈ 19 ms). However, this finding was obtained in a procedure combining the joint Simon task with an evaluation of implicit agency. On each trial, participants were required to estimate the delay between their action (or the partner’s action) and a subsequent auditory tone. Interleaving the Simon task and the interval estimation task certainly affected response times in the former task (as it was interrupted on each trial). Moreover, the interval estimation task required participants to pay attention to the outcome of the partner’s action. These effects induced by the procedure employed by Sahaï et al. (2023) may have influenced their findings on the JSE. Finally, a recent research manipulated whether, in the join Simon task, the robot’s response times followed a human-like distribution or not (Ciardo et al., 2022). Results showed that participants were able to discriminate the humanness vs. non-humanness of the robot’s behaviour. However, the type of robot’s behaviour did not influence the size of the JSE (11 ms in both conditions).
In sum, a limited number of studies have examined the presence of a JSE when interacting with a robotic partner, and mixed results have been reported regarding the influence of robot’s perceived humanness (Bunlon et al., 2018; Ciardo et al., 2022; Heijnen et al., 2019; Stenzel et al., 2012).
Present research
Therefore, the aim of the present research was to investigate the influence of the perceived humanness of a robotic agent on the extent to which we integrate the action of that agent into our own action/task representation, as indexed by the JSE. Our primary goal was to test further predictions of current models emphasising the role of self-other similarity in the emergence of the JSE. However, investigating the impact of the co-actor’s humanness on the JSE is not only theoretically important but also practically relevant, as it may have implications for the design of humanoid robots interacting with humans.
As we noted earlier, little research has examined the occurrence of the JSE when interacting with a robotic partner, and inconsistent results have been reported (Bunlon et al., 2018; Ciardo et al., 2022; Heijnen et al., 2019; Stenzel et al., 2012). To our knowledge, Stenzel et al.’s (2012) study remains the sole investigation demonstrating that the JSE measured with a robotic agent depends on the perceived humanness of the robot. It is essential to further investigate the modulation of JSE by perceived humanness of the co-actor because it is an important prediction of the referential coding account. Accordingly, the more features are shared between self and other, the more difficult it is to resolve the action-discrimination problem at the origin of the JSE (Dolk et al., 2013, 2014; Dolk & Prinz, 2016; Prinz, 2015). Increasing the perceived humanness of a robot implies greater similarity between self- and robot-related representations. Therefore, the referential coding approach predicts that enhancing the perceived humanness of a robotic partner should amplify the JSE. In the present research, we aimed to test further this critical prediction by extending Stenzel et al.’s (2012) findings to a different manipulation of the robot’s humanness, here based on prior social interaction.
Stenzel et al. (2012) manipulated participants’ belief through instructions about the (human-like vs. machine-like) functioning of the robot. Other studies have investigated how perceiver’s knowledge and beliefs about humanness shape behavioural and/or brain responses to robots’ actions (Cross et al., 2016; Klapper et al., 2014; Nijssen et al., 2019). In particular, a functional neuroimaging study by Cross et al. (2016) investigated how the perception of actions performed by robot and human avatars was influenced by participants’ belief about the human vs. non-human origin of the observed actions. Results showed that when participants were led to believe that the observed actions originated from real human movements, the recruitment of the mentalizing network was increased when judging the avatars’ actions. In contrast, the robot vs. human visual appearance of the avatar had a limited influence on the engagement of the mentalizing network. This finding suggests that knowledge or beliefs are more important than visual cues in the attribution of humanness (see Hortensius & Cross, 2018, for a discussion of the influences of knowledge vs. visual cues to humanness).
Knowledge about robots’ humanness can be manipulated through instructions, as in these previous studies. However, we can also gain knowledge and beliefs about the humanness of robots or other artificial agents through our experiences and interactions with them (e.g., Abubshait & Wiese, 2017; Wykowska et al., 2015). Here, we built on previous work that has demonstrated how a verbal interaction with a robot can shape participants’ social perception of the robot and their response to its presence. Spatola et al. (2019) investigated whether the mere presence of a robot could influence participants’ performance in a conflict task. Participants performed the Stroop task in the presence of a robot vs. in isolation. A critical manipulation was whether participants engaged or not in a verbal interaction with the robot before performing the Stroop task in the presence of this agent. The verbal interaction was found to promote the attribution of human characteristics to the robot. Moreover, performance in the Stroop task was modified by the presence of the robot only when it was preceded by a verbal interaction with the robot being present (see also Spatola et al., 2020). Building on this work, the present study examined, for the first time, whether the magnitude of the JSE is stronger when participants engaged previously in a verbal interaction with the co-acting robot than when they did not.
Across two experiments, our main goal was to test whether the JSE measured with a robotic partner depended upon its humanness, which was manipulated by the presence or absence of a verbal interaction between the participants and the robot prior to the Go/No-go Simon task. We expected this verbal interaction to increase the perceived humanness of the robotic partner. Robot humanness was manipulated using a within-participant design in Experiment 1 and a between-participants design in Experiment 2. The referential coding account predicts that the JSE should increase following a verbal interaction with the robot (i.e., the “social” robot), as compared to the condition in which this interaction did not occur (i.e., the “non-social” robot).
A secondary goal (Experiment 2) was to clarify whether the size of the JSE with a humanoid robot differs from that usually measured with a human co-actor. Consistent with the view that self-other similarities modulate the JSE, a survey of joint action research suggested that the JSE obtained with a humanoid robot is smaller than that measured with a human partner (see Dolk & Prinz, 2016). However, this conclusion rests on the comparison of independent studies. As a further test of the hypothesis that self-other similarity influences the JSE, Experiment 2 also included a human partner condition. It is unknown whether attributing human-like traits to a robot can overcome its non-human visual appearance. This raises the intriguing possibility that a humanoid robot imbued with human-like traits may give rise to the same JSE as a human partner.
In both experiments, the perceived humanness of the robots was assessed through questionnaires. One questionnaire assessed the extent to which the robots were perceived as possessing traits that reflect human uniqueness and human nature (Haslam & Loughnan, 2014). Participants also completed the Robotic Social Attributes Scale (RoSAS) (Carpinella et al., 2017), a scale developed to evaluate the social perception of robots.
Experiment 1
Methods
Participants
Forty-one undergraduate psychology students (Mage = 19.12 years, SD = 1.33, 2 males, 6 left-handed) from Université Clermont Auvergne, France, took part in this experiment, in exchange for course credit. All participants had normal or corrected-to-normal vision. We had no a priori exclusion criteria for the recruitment of participants.
Previous studies showing a moderation of the JSE by the humanness of the co-actor reported large effect sizes (within-participant design, η2p = .429, Tsai & Brass, 2007; between-participants design, η2p = .10, Stenzel et al., 2012). A power analysis using PANGEA (Westfall, 2016) indicated that, with our sample size, for α = .05, we had a power of .80 for detecting an effect size of η2p = .083 in the hypothesised interaction of partner and compatibility (see below).
Informed consent was obtained from all participants included in the study. Ethical approval was obtained from the Ethics Committee for Research Involving Humans of the Université Clermont Auvergne (CER IRB UCA, Authorisation #IRB00011540-2019-44) and all aspects of this study were performed in accordance with the ethical standards set out in the 1964 Declaration of Helsinki.
Materials and apparatus
Two 1.2 m Meccanoid G15KS humanoid robots served as co-actors in the joint Simon task (Figure 1). The two robots differed in their colours (one was grey and red, and the other was grey and yellow). In the Anthropomorphic Robot Database (Phillips et al., 2018 www.abotdatabase.info) the Meccanoid G15KS has an overall humanness score of 47.48/100 (Facial features: 0.7; Body manipulators: 0.98; Surface look: 0.09).

Meccanoid G15KS robot.
The presentation of stimuli and the registration of manual responses were controlled by E-prime software (version 2.0, http://www.pstnet.com/). Stimuli were green or blue solid circle (2 × 2 cm, 1.9° of visual angle), presented at 6.5 cm (6.2°) on the right or left side of the centre of a 20-inches CRT monitor. Responses were recorded by means of a computer mouse located on the right of the monitor.
Go/No-go Simon task
Participants were seated at a distance of 60 cm from the computer screen, slightly shifted to the right of it, with their right hand resting on the computer mouse placed in front of them (both right-handed and left-handed participants responded with their right hand). They were instructed to put their left hand on their left thigh. The robot was standing on the other side of the screen, with the left hand resting on a computer mouse. The distance between the participant and the robot was approximately 80 cm (Figure 2).
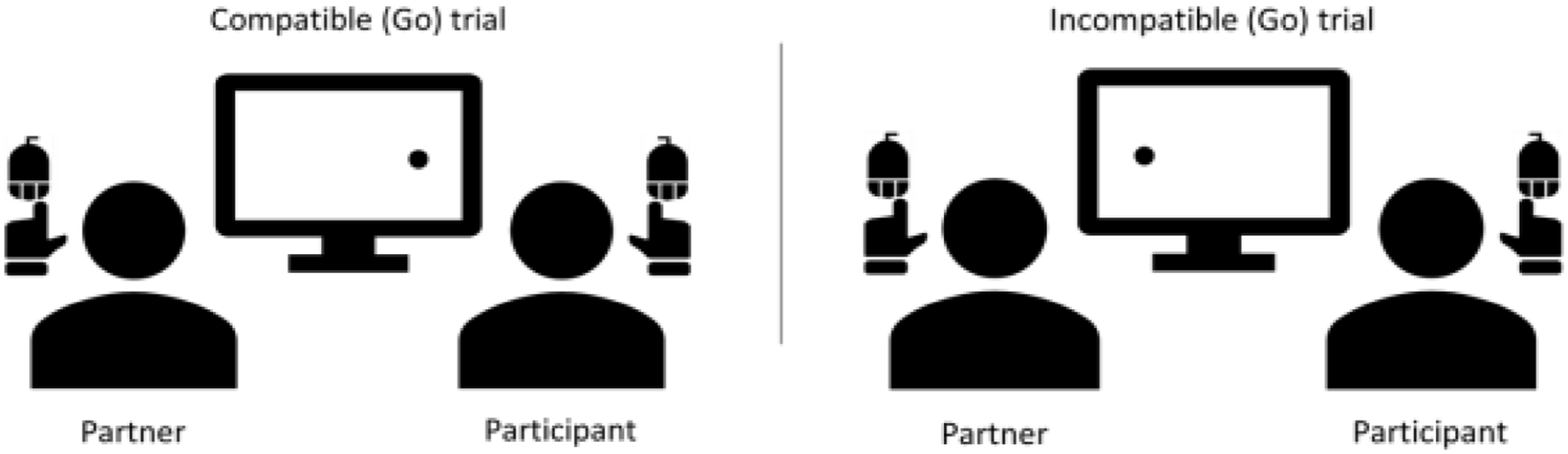
Schematic illustration of the experimental setup and conditions in the joint Go/No-go Simon task. A blue or green dot was presented on the right or left side of the screen. The participant was instructed to press the mouse button when the dot was displayed in the target (e.g., blue) colour (Go trial). The partner responded when the dot was presented in the non-target (e.g., green) colour (No-go trial). Go trials were either compatible or incompatible trials, depending on the location of the target stimulus. In Experiment 1, the partner was a social or a non-social robot. In Experiment 2, the partner was either a social robot, a non-social robot, or a human.
Every trial started with the presentation of a fixation cross (1.5 cm), in the centre of a white screen. After a random delay (1,500–2,000 ms), a green or blue dot was presented for 150 ms on the right or left side of the centre of screen. When the dot was displayed in the target colour, the participant had to press the mouse button (Go trial), otherwise he or she should not respond (No-go trial). After the presentation of the target stimulus, a blank screen was displayed until a response was given or until 2,000 ms had elapsed (later responses were counted as omissions). In case of an error (response to No-go trial) or an omission, an error message was displayed for 750 ms before the next trial started. When the non-target stimulus was displayed (No-go trial), a mouse click was triggered (via a device controlled by E-prime) in the mouse on which the robot’s hand rested—this created the illusion that the robot actually pressed the mouse button. The duration of No-go trials was based on participant’s RTs and randomly selected between +/− 1 SD from the mean response time on Go trials; if the resulting value was below 100 or exceeded 2000, and before 3 correct RTs were collected, the duration was set to 400 ms. Participants were required to answer to the target stimulus as fast as possible and to avoid making mistakes.
Each partner condition (see below) consisted of 4 blocks of 84 trials. Half of trials were no-go trials and the other half were Go trials. The stimuli were pseudorandomly selected so that for each participant, in each block, the 42 Go trials were composed of 21 compatible trials (the target appears on the subject’s side) and 21 incompatible trials (the target appears on the co-actor’s side). Before the experimental trials, participants completed a practice block of 12 trials.
Procedure
Each participant performed the joint Go/No-go Simon task twice: once with the “social robot” (i.e., robot with which the participant interacted verbally before performing the Go-No-Go task) and once with the “non-social robot” (i.e., robot with which the participant did not interact verbally). Each partner condition (Social robot and Non-social robot) consisted of two parts: a description/interaction phase, followed by performance of the joint Go/No-go task.
In the beginning of the session, the participant was seated in the participant’s chair and the experimenter delivered a cover story. It was explained that psychology researchers were collaborating with roboticists to study the design of robots. Then, the two partner conditions took place successively. Each partner condition started with the experimenter bringing the robot in the laboratory room (participants had no contact with the robots before this phase). The robot was introduced as “Marvin” in the Social robot condition and as “Isaac” in the Non-social robot condition. In the Social Robot condition, participants were then asked to interact verbally with the robot. The robot was controlled using the wizard of Oz paradigm, that is, unbeknownst to participants, animated at distance by a human operator (located in an adjacent room) using two smartphones for the control of the robot’s speech and gestures. The robot’s speech was delivered with a synthesised male voice. A pre-established conversational script was used to control for the verbal interaction with the robot. In this script, the robot provided information about itself and asked questions to the participant (e.g., “My name is Marvin. What’s your name?”; “What are you listening to as music?”; “I am a kind of assistant. What are you doing in life?) (for a detailed description of the verbal script, see Spatola et al., 2019). The interaction lasted approximately 3 min. During this phase, to enhance its perceived engagement in the verbal interaction, the robot executed gestures occasionally (moving arms, turning its head towards the participant), according to a pre-established motor script. In the Non-social robot condition, participants were given a 3 min writing task in which they were simply asked to describe the physical appearance of the robot. During this phase, the robot made head movements, as in the social-robot condition. After the interaction/description, participants performed the Go/No-go Simon task with the robot. During the joint Go/No-go Simon task, the robot made a subtle head turn (approximately 7°) towards the screen every 6–7 s (videos of the interaction and joint action phases are available on the study’s OSF site—https://osf.io/7suh8/). When the first partner condition was over, the corresponding robot was taken out of the room by the experimenter and the other robot was introduced for the second partner condition.
The order of partner conditions (Social robot and Non-social robot) was counterbalanced across participants. The experimenter left the room during both the interaction/description phase and the joint Go/No-go task.
Design
The experimental design was a 2 (Compatibility: compatible vs. incompatible trial) × 2 (Partner: Social robot vs. Non-social robot) factorial. Each factor was manipulated within-participants.
Manipulation check
At the end of the experiment, participants filled out two scales to assess their perception of each robot. Participants completed the Humanness scale (Haslam & Loughnan, 2014), which evaluated attribution of human traits to the robot along two dimensions: Human nature (i.e., characteristics of the human species that are shared with other animals; e.g., emotional responsiveness) and Human uniqueness (i.e., characteristics distinguishing humans from other species; e.g., civility) (for details, see Spatola et al., 2018, 2019). The Humanness scale consisted of 20 items, each rated on a 1–9 Likert-type scale (items assessing deprivation of human characteristics were reverse coded). Moreover, participants completed the Robotic Social Attributes Scale (RoSAS) (Carpinella et al., 2017), a scale developed to assess the social judgement of robots. The two fundamental dimensions of social perception, warmth and competence, which are evaluated in the RoSAS, are linked to the perception of others as humans. Indeed, warmth would be a dimension on which humans differ from artificial agents (Haslam & Loughnan, 2014). Consistently, warmth and competence dimensions have been linked to experience (capacity to feel) and agency (capacity to act), the two dimensions governing the ascription of mind to various entities, including humans, animals and robots (Gray et al., 2007; Hortensius & Cross, 2018; Waytz et al., 2010). RoSAS is an 18-item questionnaire made of three subscales referring to three dimensions: warmth (e.g., “Is the robot Social?), competence (e.g., “Is the robot Capable?”) and discomfort (e.g., “Is the robot Scary?). For each item, participants rated their agreement on a Likert-type scale ranging from 1 (not at all) to 9 (totally).
We recognise that one cannot be certain whether the judgements of the robots evaluated through the Humanness scale and the RoSAS truly reflect the same dimensions or the same constructs as when individuals judge human beings. Nonetheless, both scales should still capture the extent to which the robots in the social and non-social conditions differed in characteristics that would make them more or less human-like. Hence, we assume that the combination of the Humanness scale and the RoSAS allowed us to assess whether our manipulation was effective in modifying the perceived humanness of the robots. We expected higher scores on these two scales under the Social robot condition, as compared with the Non-social robot condition.
Ultimately, participants were asked whether they noticed anything in particular during the experiment. None of them reported any suspicion about the robot’s behaviour during the social interaction, suggesting the Wizard of Oz paradigm worked well. Three participants noticed or had a hint that the robots did not actually press the mouse button during the joint Go/No-go task. Excluding these 3 participants from the next analyses did not change the results.
Data analyses
We examined the data using frequentist analyses and traditional significance tests, with an alpha level of .05. The frequentists analyses were complemented with Bayesian statistics. In the case of an ANOVA, in addition to frequentist statistics, we report the Bayes factor for the inclusion (BFincl) of a particular effect, reflecting the strength of evidence in favour of including that effect in an explanatory model of the data. Bayesian ANOVAs were conducted in JASP with default Cauchy priors (width factor of 0.5 for fixed effects, 1.0 for random effects, and 0.354 for interaction effects) (Rouder et al., 2012). Outcomes of Bayesian ANOVAs are provided in Supplementary material. Bayesian paired samples t-tests were conducted with the default Cauchy prior (.707) (Morey et al., 2015) and BF10 or BF01 are reported. Complementing the frequentist inference with the Bayesian approach enables us to determine whether a non-significant result is substantial evidence for the absence of an effect, or whether the data are simply insensitive (Dienes, 2014).
Frequentist and Bayesian analyses were carried out using JASP 0.16.3 (JASP Team, 2022) and R version 4.1.30.
Results and discussion
Data are publicly accessible at the Open Science Framework (OSF; https://osf.io/7suh8/).
Manipulation check
Participants who did not complete all items of a scale were excluded from the corresponding analysis. Three participants were excluded from the analysis of the scores at the ROSAS and 5 participants were excluded from the analysis of the scores at the Humanness scale. These participants were not removed from the RT analyses.
For each dimension of the RoSAS, corresponding scores (Figure 3) obtained in each robot condition were compared using a paired-sample t-test (Bonferroni-corrected p values are reported). Mean RoSAS scores referring to the competence dimension were significantly higher in the Social robot condition (M = 6.473, SE = 0.230, Cronbach’s α = .810) than in the Non-social robot condition (M = 5.074, SE = 0.277, Cronbach’s α = .824), t(37) = 5.264, p < .001, d = .854, mean difference 95% CI = [0.861, 1.938], BF10 = 3148. Scores related to the warmth dimension were also higher in the Social robot condition (M = 5.316, SE = 0.268, Cronbach’s α = .866), than in the Non-social robot condition (M = 2.533, SE = 0.258, Cronbach’s α = .912), t(37) = 8.471, p < .001, d = 1.374, mean difference 95% CI = [2.102, 3.424], BF10 = 3.13e + 7. As for the discomfort dimension, the Social robot condition (M = 1.803, SE = 0.164, Cronbach’s α = .809) did not differ significantly from the Non-social robot condition (M = 2.145, SE = .188, Cronbach’s α = .837), t(37) = 2.130, p = .120, d = .346, mean difference 95% CI = [0.016, 0.671], BF10 = 1.310.
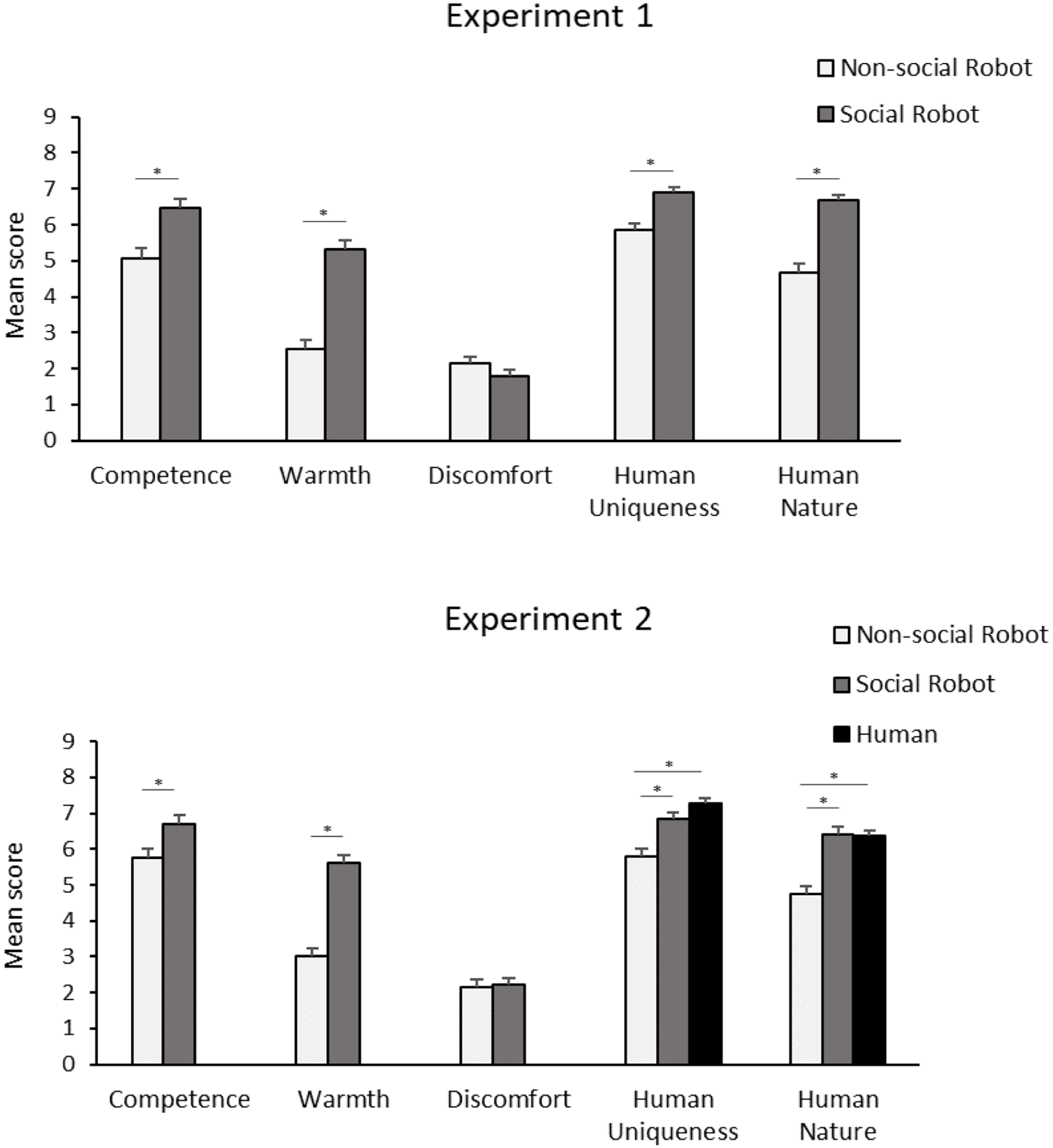
Mean scores for each dimension of the Robotic Social Attributes Scale (Competence, Warmth and Discomfort) and Humanness Scale (Human Uniqueness and Human Nature) as a function of Partner condition (Non-social Robot, Social Robot, Human), in Experiment 1 (top) and Experiment 2 (bottom). Only the Humanness scale was completed in the Human partner condition of Experiment 2. Error bars represent standard error from the mean.
Analysis of the data from the Humaneness scale revealed that scores related to the Human uniqueness dimension were significantly larger in the Social robot condition (M = 6.894, SE = 0.155; Cronbach’s α = .792), than in the Non-social robot condition (M = 5.839, SE = 0.220; Cronbach’s α = .813), t(35) = 5.481, p < .001, d = .914, mean difference 95% CI = [0.519, 1.299], BF10 = 5091. Scores related to the Human nature dimension were also significantly higher in the Social robot condition (M = 6.672, SE = 0.168; Cronbach’s α = .736), than in the Non-social robot condition (M = 4.669, SE = .260; Cronbach’s α = .843), t(35) = 7.210, p < .001, d = 1.202, mean difference 95% CI = [0.766, 1.627], BF10 = 6.58e + 5.
Together, these findings indicate that, as expected, the perceived humanness of the Social robot was increased relative to the Non-social robot.
Go/No-go Simon task
Errors (response in a no-go trial) and omissions (no-response in a go-trial) were very rare (< 1%) and not further analysed.
Prior to reaction times (RT) analyses, the first go-trial of a block and trials with an error (0.81%) or omission (0.90%) as well as trials immediately following such errors, were excluded. Then, for each participant and each condition, RTs above or below 2.5 median absolute deviation from the median were excluded from analyses (5.53%) (Leys et al., 2013).
The Simon effect was calculated by subtracting RTs on compatible trials from RTs on incompatible trials. As per Stenzel et al. (2012), participants with a Simon effect ± 2.5 SD from the mean of the whole sample were removed from analyses (see also Dolk, Hommel, Prinz, & Liepelt, 2014; Müller, Kühn, et al., 2011). This exclusion criterion is justified because we were interested in the modulation of the amplitude of the Simon effect and it is more conservative than identifying outlier participants per condition. One participant was excluded on this basis (including this participant in the analyses did not change the direction or significance of the results). As stated above, participants excluded from the analyses of questionnaire data were not excluded from RT analyses. Therefore, the final sample for RT analyses consisted of 40 participants.
Correct RTs (see Table 1) were submitted to an ANOVA with Compatibility (compatible vs. incompatible trial) and Partner (social robot vs. non-social robot) as within-participant factors. This analysis revealed a significant effect of Compatibility: RTs on compatible trials were significantly faster than RTs on incompatible trials (378 vs. 386 ms, respectively; mean difference 95% CI = [5.93, 9.29]), F(1, 39) = 20.50, p < .001, η² p = .34, BFincl = 196.55. The main effect of Partner was also significant, F(1, 39) = 4.69, p = .036, η² p = .107, BFincl = 1.54, with significantly faster RTs in the Non-social robot condition than in the Social robot condition (379 vs. 386 ms, respectively; mean difference 95% CI = [−10.96, −4.04]). Critically, the Partner × Compatibility interaction was not significant, F(1, 39) = .011, p = .917, η² p = .00, BFincl = 0.643, indicating no difference in terms of Simon effect between the two partner conditions. The Simon effect (mean RT on incompatible trials minus mean RT on compatible trials) in the Social robot condition was 7.47 ms and it was 7.76 ms, in the Non-social robot condition (mean difference 95% CI = [−6.01, 5.42]). A comparison of the amplitude of the compatibility effect in the two partner conditions using a Bayesian paired samples t-test resulted in a BF01 = 5.831, indicating substantial evidence in favour of the null hypothesis (Dienes, 2014; Jeffreys, 1961), that is indeed no effect of partner on the amplitude of the Simon effect.
Experiment 1: Mean RTs (in milliseconds) and standard error (SE) for compatible and incompatible trials, along with Simon effect (incompatible RT minus compatible RT), as a function of partner condition.
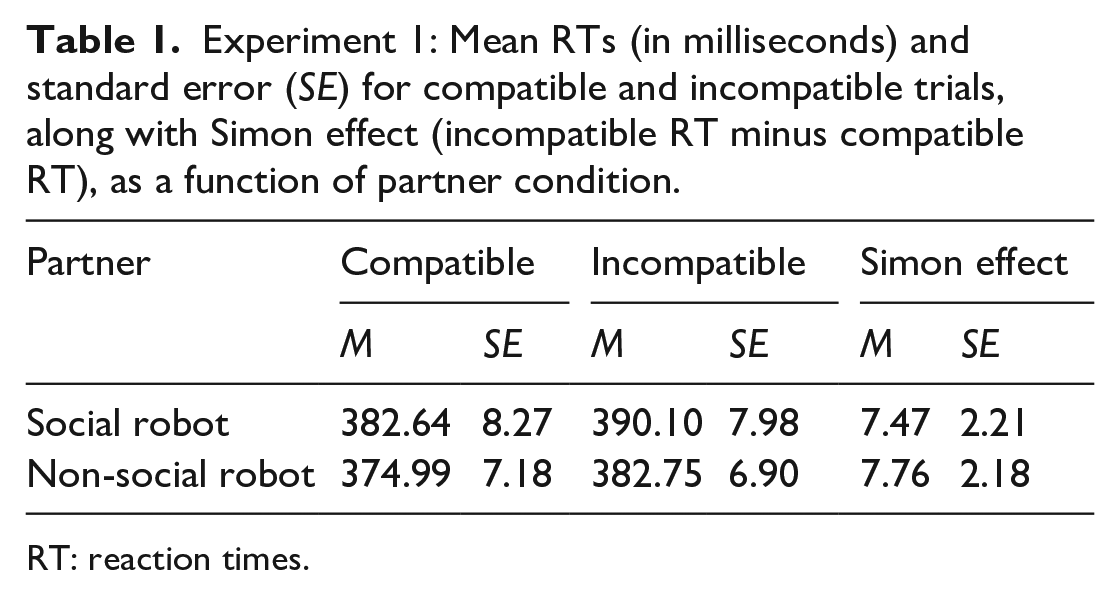
RT: reaction times.
To control for order effects, the same analysis was conducted with the additional factor Order of conditions (Social robot first vs. second) as a between-participants factor. This analysis only revealed a significant interaction between Order of conditions and Partner, F(1, 38) = 4.240, p = .046, η² p = .100, BFincl = 1.650, with slower RTs in the Social robot condition (395 ms) as compared with the Non-social robot condition (380 ms), when the former condition was performed first, and comparable RTs in both Partner conditions when the Social robot condition was performed after the Non-social robot condition (377 vs. 377 ms, respectively). The main effect of Order of conditions, the Compatibility × Order of conditions, and the Compatibility × Order of conditions × Partner interactions were not significant, all F(1, 38) < 1.0, all BFincl < 1.00.
Linear regression analyses were conducted to test the extent to which the difference in the size of the Simon effect between Social and Non-social robot conditions was predicted by the corresponding differences in scores obtained on the RoSAS and the Humanness scale. None of these analyses revealed a significant association (see supplementary materials).
The results of Experiment 1 indicate the presence of a significant compatibility effect when sharing the Go/No-go Simon task with a humanoid robot partner. Importantly, however, the size of this Simon effect was not influenced by the type of robot with whom the task was shared. Also, an unexpected finding was the main effect of Partner, such that RTs were overall slower in the Social robot condition, as compared with the Non-social robot condition. The source of this effect is uncertain. One may speculate that participants in the Social robot condition were more distracted following the unusual experience of a verbal interaction with a robot and/or paid more attention to this robot during the joint Go/No-go task, which impaired their overall performance (Baron, 1986).
The size of the Simon effect (≈ 7.5 ms) observed in Experiment 1 was within the range of the JSE that has been previously reported during joint action with a human partner in a similar Go/No-go Simon task (e.g., Beaurenaut et al., 2021; Quintard et al., 2020; Sebanz et al., 2003). The present experiment may thus provide some evidence that when sharing the Go-No-Go Simon task with a humanoid robot, a JSE emerges irrespective of the humanness attributed to the robot. The presence of a compatibility effect in the joint Go/No-go Simon task is often interpreted as evidence for a JSE, even when it is not compared with an individual Go/No-go condition (e.g., Beaurenaut et al., 2021; Ciardo et al., 2022; Colzato et al., 2012a, 2012b; Liepelt & Raab, 2021; Quintard et al., 2020; Stenzel et al., 2012). However, it has been reported that participants may show a spatial compatibility effect in the individual version of the Go/No-go task (e.g., Davranche et al., 2019; Dittrich et al., 2017; Ford & Aberdein, 2015, but see the meta-analysis by Karlinsky et al., 2017). Therefore, the absence of an individual Go/No-go condition in Experiment 1 warrants caution when interpreting the observed compatibility effect in terms of JSE.
Our results indicate that the human/social characteristics attributed to the co-acting robot do not necessarily make a difference on the size of the spatial compatibility effect measured in the joint Go/No-go Simon task. The partner effect indeed did not occur while—as expected—the perceived humanness of the social robot was higher than that of the non-social robot. However, given that we used a within-participant design, one may question the validity of this difference between the two robot conditions on self-reported measures. Indeed, because participants completed questionnaires after experiencing both robots, one cannot exclude that their responses were biased by demand characteristics (Nichols & Edlund, 2015); that is, the experimental design may have encouraged participants to compare the two robot conditions, cueing them to respond in a certain way. Therefore, there is some doubt about the effectiveness of our manipulation of the humaneness of the robot. To circumvent this potential issue, we conducted a second experiment in which the humaneness of the robot was manipulated between participants. This also allowed us to potentially replicate the findings of Experiment 1 using a different design.
In addition, as a further test of the humanness of the interacting partner, in Experiment 2, we tested whether the JSE measured when co-acting with a humanoid robot differs from that measured when co-acting with a human co-actor. Perhaps more importantly, we also included an individual version of the Go/No-go task (participants alone) to estimate more directly the JSE and its sensitivity to robotic and human presence.
Experiment 2
One limitation of Experiment 1 is that it did not make it possible to directly estimate the JSE due to the absence of a baseline, that is, participants working alone on the Go/No-Go Simon task (compared with participants working coactively). We included this baseline in Experiment 2, in which all participants in each condition performed the Go/No-go Simon task twice, first alone then coactively. In Experiment 2, each participant also shared the Go/No-go Simon task with only one co-actor. One group of participants shared the Go/No-Go task with a Social robot, whereas another group shared the task with a Non-social robot. Finally, we also included a third group of participants who shared the task with a human co-actor, which allowed us to test whether the JSE obtained with robots differed from that obtained with a human co-actor.
It is worth stressing that all participants performed the individual condition before the joint condition. As in Dittrich et al. (2017), this was motivated by the assumption that response codes elaborated during the joint condition may carry over to the subsequent individual condition, favouring compatibility effects (see Ansorge & Wühr, 2009). Therefore, to prevent contamination from prior performance of the joint Simon task, we had participants perform the individual condition first.
Methods
Participants
Participants included 108 undergraduate psychology students from Université Clermont Auvergne, France, who participated for course credit. They were randomly assigned to one of the three experimental conditions: Social robot condition (N = 37, Mage = 18.70 years, SD = 1.27, two males, three left-handed); Non-social robot condition (N = 36, Mage = 18.81 years, SD = 1.24, two males, two left-handed); Human condition (N = 35, Mage = 19.57 years, SD = 2.20, three males, three left-handed). All had normal or corrected to normal vision; none had participated in the previous experiment. A power analysis using PANGEA (Westfall, 2016) indicated that our sample size yielded a power of 82% to detect an effect size of η2p = .048 for the 2 (Compatibility) × 2 (Task setting) × 3 (Partner) interaction (see below for description of the design).
Apparatus
Apparatus and stimulus material were the same as in Experiment 1.
Tasks and procedure
The Social and Non-social robot conditions were the same as in Experiment 1 except that before being introduced to the co-actor, participants performed an individual version of the Go/No-go Simon task. In this individual task setting, participants performed the Go/No-go Simon task alone (with the experimenter absent, as in the joint task setting); the duration of No-go stimuli was defined the same way as in the joint version of the task.
For the Human partner condition, the co-actor was a 22-year-old male confederate. The use of a male co-actor was justified because, in each robot condition, the robot was introduced with a male name and because a synthesised male voice was used in the social robot condition. In the Human partner condition, both the participant and the confederate entered the laboratory room in the beginning of the session, and the confederate pretended to be another subject taking part in the experiment. After both the confederate and the participant read an informed consent form (while being seated at different locations in the room to prevent interaction), the experimenter explained that one person (the participant) would stay in the experimental room while the other (the confederate) would go in another adjacent room. Participants then performed the individual Go/No-go task. Following the individual Go/No-go task, participants completed a 3-min writing task, which consisted in describing the picture of an ice-skating scene. The human co-actor reentered the room and was seated next to the participant for the joint Go/No-go task. To comply with sanitary measures related to the COVID-19 pandemic, a transparent Plexiglas panel was positioned between the participant and the confederate, and both were required to wear a mask covering their mouth and nose. During the joint Go/No-go task, the confederate really pressed the mouse button when his target stimulus was presented. Throughout the experiment, the confederate did not initiate verbal interactions with the participant or reduced them to the minimum when solicited by the participant. Participants in the Human partner condition only completed the Humaneness scale. Due to the extended duration of the condition involving the confederate, as compared to the robot conditions, the RoSAS was dropped out in the Human partner condition.
As before, participants performed 4 blocks of 84 trials in each task setting (individual and joint), with each block including 42 go trials (21 compatible and 21 incompatible trials).
Design
The experimental design was a 2 (Task setting: individual vs. joint Go/No-go) × 2 (Compatibility: compatible vs. incompatible trial) × 3 (Partner: Social robot, Non-social robot, Human) factorial. Task setting and Compatibility were within-participants factors and Partner was a between-participants factor.
Results and discussion
Manipulation check
For each dimension of the ROSAS, corresponding scores obtained in the Social and Non-social robot conditions (Figure 3) were compared using independent-sample t-tests (Bonferroni-corrected p values are reported). Scores related to the competence dimension (Cronbach’s α = .821) were significantly higher in the Social robot condition (M = 6.712, SE = 0.239) than in the Non-social robot condition (M = 5.741, SE = 0.265), t(71) = 2.724, p = .016, d = .638, mean difference 95% CI = [0.260, 1.682], BF10 = 5.396. On the warmth dimension (Cronbach’s α = .863), scores were also higher in the Social robot condition (M = 5.622, SE = 0.223) than in the Non-social robot condition (M = 3.009, SE = 0.226), t(71) = 8.235, p < .001, d = 1.928, mean difference 95% CI = [1.980, 3.245], BF10 = 9.944e + 8. As in Experiment 1, the Social robot condition (M = 2.221, SE = 0.178) and the Non-social robot condition (M = 2.157, SE = 0.208) did not differ significantly on the discomfort dimension (Cronbach’s α = .769), t(71) = .232, p = 1.00, d = .054, mean difference 95% CI = [0.482, 0.608], BF10 = 0.247.
For each dimension (Human nature and Human uniqueness) of the humanness scale, scores were submitted to an ANOVA, with Partner (Social robot, Non-social robot, Human) as a between-participants factor. The analysis of scores related to Human uniqueness (Cronbach’s α = .816) revealed a significant effect of partner, F(2, 105) = 16.370, p < .001, η² p = .238, BFincl = 23 890. Follow-up t-tests (with Bonferroni corrections applied) revealed that the scores in the Social robot condition (M = 6.83, SE = 0.190) were significantly higher than in the Non-social robot condition (M = 5.808, SE = 0.200), t = 3.964, p < .001, d = 0.867, mean difference 95% CI = [0.409, 1.634], BF10 = 64.61. Scores in the Human condition (M = 7.260, SE = 0.155) were also significantly higher than in the Non-social robot condition, t = 5.556, p < .001, d = 1.353, mean difference 95% CI = [0.830, 2.073], BF10 = 44 872. The Social robot condition and the Human condition did not differ significantly, t = 1.658, p = .301, d = 0.411, mean difference 95% CI = [−0.187, 1.047], BF10 = 0.887. As for the Human nature dimension (Cronbach’s α = .837), the effect of partner was also significant, F(2, 105) = 20.530, p < .001, η² p = .281, BFincl = 4.22e + 5. Follow-up t-tests revealed that the scores in the Non-social robot condition (M = 4.739, SE = 0.223) were significantly smaller compared with the Social robot condition (M = 6.397, SE = 0.241), t = 5.652, p < .001, d = 1.182, mean difference 95% CI = [−2.356, −0.961], BF10 = 4610, and to the Human condition (M = 6.357, SE = 0.145), t = 5.440, p < .001, d = 1.436, mean difference 95% CI = [−2.326, −0.911], BF10 = 1.63e + 5. The Social robot condition and the Human condition did not differ significantly, t = 0.136, p > .100, d = 0.033, mean difference 95% CI = [−0.743, 0.662], BF10 = 0.245.
Go/No-go Simon task
Of the 108 participants included in the study, RT data from three participants were excluded due to equipment failure or recording errors. Data from another participant who did not follow the instructions were also excluded.
The same outlier procedure as in Experiment 1 was applied to the RT data, resulting in the exclusion of 5.78% of trials. The Simon effect was computed in each task-setting, by subtracting RTs on compatible trials from RTs on incompatible trials. Three participants showing a Simon effect deviating more than 2.5 SD from the mean of the whole sample were excluded. The resulting sample sizes were: Social robot condition N = 35; Non-social robot condition N = 34; Human condition N = 32.
Correct RTs (see Table 2) were submitted to an ANOVA with Task setting (Individual vs. Joint Go/No-go) and Compatibility (Compatible vs. Incompatible) as within-participant factors, and Partner (Social robot, Non-social robot, Human) as a between-participants factor. Analysis revealed no main effect of Partner on RTs, F(2, 98) = 0.298, p = .743, η² p = .006, BFincl = 0.766. The main effect of Compatibility was significant, F(1, 98) = 65.795, p < .001, η² p = .402, BFincl = 4.745e + 10, with longer RTs on incompatible trials than compatible trials (356 vs. 350 ms, respectively; mean difference 95% CI = [4.503, 7.443]). There was a main effect of Task setting, F(1, 98) = 11.210, p = .001, η² p = .10, BFincl = 287.45, which interacted with Compatibility, F(1, 98) = 10.916, p = .001, η² p = .100, BFincl = 58.19. A paired-sample t-test was conducted on the Simon effect (RT difference between incompatible and compatible trials) to interpret the interaction between Compatibility and Task setting. The Simon effect was larger in the Joint condition than in the Individual condition, t(100) = 3.354, p = .001, d = .334, mean difference 95% CI = [1.369, 5.335], BF10 = 19.87. One-sample t-tests revealed that the Simon effect was significantly greater than zero in both the Individual condition, t(100) = 4.967, p < .001, d = .494, BF10 = 5190, and the Joint condition, t(100) = 8.266, p < .001, d = .822, BF10 = 1.271e + 10. The Partner × Compatibility interaction was not significant F(2, 98) = 1.381, p = .256, η² p = .027, BFincl = 0.321. Importantly, the Partner × Compatibility × Task setting interaction was not significant either, F(2, 98) = 0.592, p = .555, η² p = .006, BFincl = 0.085.2
Experiment 2: Mean RTs (in milliseconds) and standard error (SE) for compatible and incompatible trials, along with Simon effect (incompatible RT minus compatible RT), as a function of task-setting and partner condition.
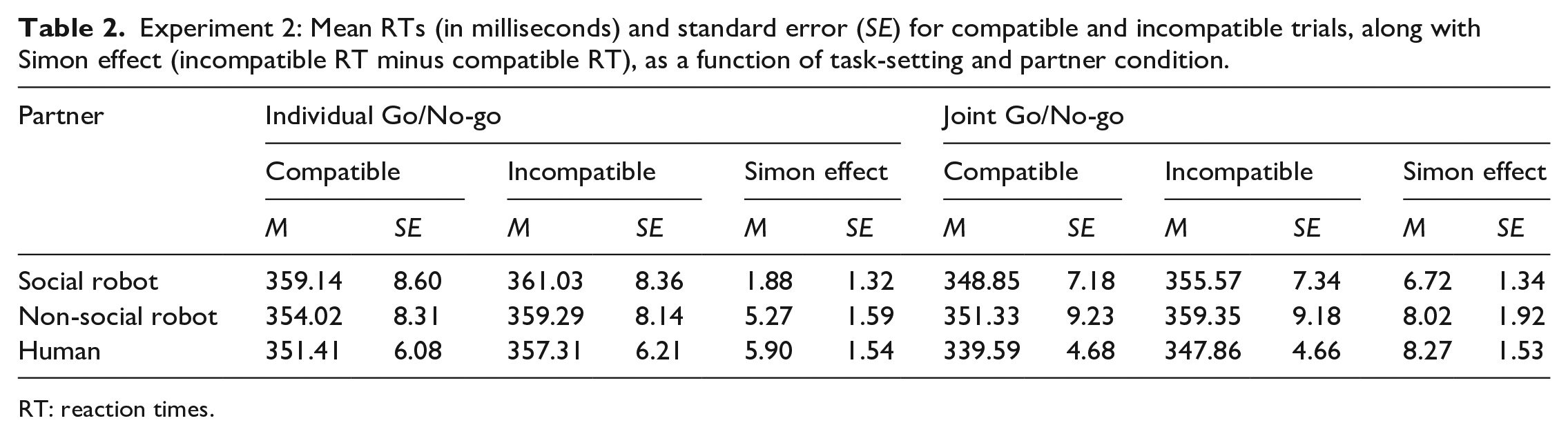
RT: reaction times.
We also conducted a Bayesian ANOVA on the Simon effect in the joint action condition, with Partner as a between-participants factor. The analysis resulted in a BF01 = 8.836, implying that the model that receives the most support is the null model.
Linear regression analyses further indicated that none of the scores obtained on the Humanness scale or on the ROSAS was a significant predictor of the size of the JSE (see supplementary materials).
Findings from Experiment 2 are consistent with those of Experiment 1. A significant JSE was obtained in both the Social and Non-social robot conditions. However, these two conditions yielded comparable JSE. Our results further indicated that the JSE measured with a co-acting robot did not differ significantly from that measured with a human co-actor. Crucially, using a between-participants design, Experiment 2 confirmed that our manipulation was effective in modifying the perceived humanness of the robot being present. Questionnaire results showed that participants in the Social robot condition attributed more human-like features to the robot than participants in the Non-social robot condition.
Furthermore, Experiment 2 revealed a significant compatibility effect in the individual condition. However, this effect was significantly reduced as compared to that measured in the joint condition, suggesting that the presence of another co-acting agent modified participants’ representation of action (Dolk et al., 2014). The occurrence of a significant compatibility effect in the individual condition is consistent with previous works suggesting that this possibility should no longer be neglected (e.g., Davranche et al., 2019; Dittrich et al., 2017; Dolk & Liepelt, 2018; Ford & Aberdein, 2015; Shafaei et al., 2020). In contrast, other studies have reported no significant Simon effect when the Go/No-go task was performed in isolation (e.g., Dolk et al., 2013; Hommel, 1996; Sahaï et al., 2019; Sebanz et al., 2003, 2006; for a recent review, see Davranche et al., 2019). As matters stand, the reason for this discrepancy is unclear. However, as suggested by Davranche et al. (2019), a possibility is that a systematic but small compatibility effect is present in the individual Go/No-go task and a lack of power (due to the limited number of participants and/or trials) could explain why some studies failed to detect this effect.
A potential limitation of Experiment 2 is that the joint action condition was always preceded by the individual condition. This may limit the interpretation of a larger compatibility in the joint vs. single action as evidence for a genuine JSE, as it may be confounded with practice effects. However, the available evidence on this matter indicates that the Simon effect tends to diminish with practice (D’Ascenzo et al., 2021; Kattner, 2021; Proctor & Lu, 1999; Simon et al., 1973). Research also indicates that performance on Go/No-go tasks improves with practice (Verbruggen & Logan, 2008). Thus, in the present study, potential practice effects would have run counter to the detection of a larger compatibility effect in the joint action condition as compared to the individual condition. Therefore, despite the study design, the findings of Experiment 2 can be interpreted as evidence for a genuine JSE with a robotic agent.
Finally, the presence of a JSE in the non-social robot condition seems at odds with Stenzel et al.’s (2012) findings, which showed a significant JSE only when the robot was introduced as functioning in a human-like manner. However, considering our natural tendency to imbue artificial agents with human-like traits (Johnson, 2003), it is possible that in the absence of specific knowledge regarding the robot with whom they interacted, participants interpreted the robot’s capability to respond to a stimulus as a cue to humanness, which would explain the emergence of a JSE, as in the human-like condition from Stenzel et al.’s (2012) study. This interpretation fits with the finding that in the present experiments, the perceived competence of both the social and the non-social robot was relatively high (above 5 on 1–9 scale).
General discussion
The aim of this study was to investigate (a) whether individuals integrate the action of a co-acting robotic agent in their own task representation, as indexed by the JSE, and (b) whether this integration depends on the perceived humanness of the interacting partner. Perceived humanness of the robot was manipulated by varying prior interaction with that agent. In the Social robot condition, the joint Go/No-go Simon task was preceded by a verbal interaction with the robot; in the Non-social robot condition this verbal interaction was absent. A within-participant design was used in Experiment 1 and a between-participants design was used in Experiment 2. In Experiment 2, robot conditions were further compared to a human condition in which participants shared the Go/No-go Simon task with a human co-actor. In both experiments, results confirmed that the verbal interaction prompted the attribution of human-like traits to the robot. However, in both experiments, the compatibility effect measured during joint action was not modulated by the humanness of the co-actor with whom the task was shared.
An important result of the present research is the demonstration, in Experiment 2, that the Simon effect measured while sharing a Go/No-go task with a robotic agent was larger than the Simon effect measured in an individual version of the task. Thus, extending prior research (Bunlon et al., 2018; Ciardo et al., 2022; Heijnen et al., 2019; Strait et al., 2020), we demonstrate here for the first time the presence of “genuine” JSE in participants sharing the Go/No-go Simon task with a physically present robot.
Our second main finding is that the JSE was not affected by the perceived humanness of the co-actor with whom the task was shared. Before discussing this finding in further detail, some clarifications need to be made. First, it should be stressed that the lack of influence of partner conditions on the compatibility effect in the joint Simon task was observed across two experiments, using different designs. Second, regarding our manipulation of the perceived humanness of the robot, self-reported measures confirmed that the manipulation was effective, with participants attributing more human-like traits to the social robot than the non-social robot. In addition, we manipulated the perceived humanness of the robot by using the very same procedure and the same robots as Spatola et al. (2019, 2020). Spatola and colleagues (2019, 2020) found that participants’ performance in conflict tasks (Stroop and Flanker), was affected by the robot’s (passive) presence in the social robot condition, while it was not in the non-social robot condition. Therefore, our results can hardly be attributed to a weak manipulation of the robots’ humanness. Furthermore, results of Experiment 2 showed no difference between JSE measured in robot and human conditions. Thus, the present finding can be viewed as conclusive evidence for an absence of effect of the (perceived) humanness of the interacting partner on the JSE.
As outlined in the introduction, the co-representation hypothesis assumes that the JSE emerges from domain-specific, social processes related to mentalizing (we would represent the action at the other’s disposal and the related task rules) (Frith, 2012; Sebanz et al., 2003, 2006). Hence, a possible way to interpret our finding of JSEs with both human and robot co-actors is that the social processes engaged during joint action with a human are also used when co-acting with a robot. In line with this view, it has been proposed that when artificial agents are imbued with human-like traits, they become an appropriate target for mental states attribution, hence allowing social action/task co-representation mechanisms (Müller, Brass, et al., 2011; Stenzel et al., 2012). However, following this line of reasoning, the extent to which a robot is perceived as possessing human-like traits should affect the JSE. This is not what we observed. Therefore, our finding of an absence of effect of robot’s humanness on the JSE argues against the view that the same (social) co-representation mechanism would operate in both the human and robot partner conditions.
Alternatively, in line with previous work emphasising the role of domain-general processes in social cognition (Heyes, 2014; Ramsey & Ward, 2020), the referential coding account suggests that the JSE arises from a discrimination problem between event representations, be they social or not (Dolk et al., 2013, 2014; Klempova & Liepelt, 2016; Sellaro et al., 2015). Hence, the same mechanism (discrimination between events through referential coding) would be involved in the generation of the JSE in both social and non-social settings or irrespective of the human vs. non-human nature of the co-actor. Critically, in this perspective, the similarity between self- and other-related action events is a key factor in the emergence of the JSE. In our study, which involved a typical joint Simon task setting, self- and other-generated action events shared several features (effector, movement, sound effect); according to the referential coding approach, this similarity of self- and other-produced action events gave rise to an action-discrimination problem at the origin of the JSE in both human and robot conditions.
However, caution is warranted when interpreting this finding, as it cannot be excluded that although comparable joint action effects were obtained with the different co-actors, distinct mechanisms were recruited (Cross & Ramsey, 2021; Wen & Hsieh, 2015). For instance, while the JSE with non-human co-actors might reflect domain-general processes (e.g., referential coding), the JSE that emerges when co-acting with another human might reflect specifically social processes or a combination of both types of processes (see Cross & Ramsey, 2021 for a discussion of this issue in human-robot interaction research). Nevertheless, the referential coding account remains a compelling alternative to this view as it offers, via a single mechanism, a comprehensive explanation of various findings, including the occurrence of a JSE with human and non-human agents or artificial objects, and its modulation by social variables (Dolk & Prinz, 2016). Furthermore, in the present study, we went beyond a comparison between interacting with a human vs. a robot by manipulating the (perceived) humanness of the robot co-actors, which allows us to better appreciate the mechanisms underlying the JSE. In what follows, we speculate about the potential implications of an absence of modulation of joint action effects by the perceived humanness of the interacting partner and, more generally, by self-other similarity. To anticipate, while acknowledging the role of the similarity of action events and referential coding in the emergence of the JSE, we invite to consider cognitive control processes to explain previous findings pertaining to the modulation of JSE by social variables.
Thus, our finding of similar JSEs with human and robot co-actors is consistent with the core assumption of the referential coding account: the JSE emerges from a discrimination problem between representations of alternative action events, be they related to a human agent or not (Dolk et al., 2013, 2014). However, as detailed in the introduction, to explain the modulation of the JSE by social variables known to affect self-other distinction, a more comprehensive version of the referential coding account has been formulated, positing that beyond the similarity between produced responses, the discrimination problem also depends on abstract/conceptual features shared between the agents generating these responses (Dolk et al., 2014; Dolk & Prinz, 2016; Prinz, 2015). Critically, this “self-other similarity hypothesis” predicts that increasing the perceived humanness of an artificial co-agent—by increasing self-other similarity—should amplify the JSE. Therefore, our finding of an absence of effect of robot’s humanness on the JSE is at odds with the self-other similarity hypothesis derived from the referential coding account.
It must be stressed that other studies have reported no modulation of the JSE by self-other similarity. As already mentioned, mixed results have been reported regarding the influence of perceived humanness on the JSE measured with a robotic partner (Bunlon et al., 2018; Heijnen et al., 2019; Wen & Hsieh, 2015). Importantly, convergent findings also come from research on joint action between human partners. In a recent study by Beaurenaut et al. (2021), pairs of participants performed the joint Simon task either in a “common condition”, where both participants were exposed to a threat, or in a “non-common” condition, where only one of the two participants was exposed to the threat. Results indicated no significant difference between conditions in the size of the JSE. As pointed out by Beaurenaut et al. (2021), given that the common condition (vs. non-common condition) involved higher self-other similarity, this result is inconsistent with the self-other similarity hypothesis derived from the referential coding approach.
Thus, if we take the JSE as arising from an action-discrimination problem, our findings and those reported in other recent studies (Beaurenaut et al., 2021; Bunlon et al., 2018; Ciardo et al., 2022; Heijnen et al., 2019) might lead to the conclusion that, as opposed to the similarity between responses (which would explain the presence of JSE with both human and artificial agents), the similarity between self and other at the level of transient or permanent conceptual/abstract features (such as affective state, identity, or humanness) does not necessarily contribute to the discrimination problem at the origin of the JSE. However, this conclusion seems hard to reconcile with previous research showing that the JSE is increased by social variables known to reduce the perceived difference between self and other, such as shared group membership (McClung et al., 2013), romantic relationship (Quintard et al., 2020), or the priming of an interdependent self-view (Colzato et al., 2012a). A possible way to resolve this contradiction is to consider that factors affecting the boundaries between self and other can have various effects on cognition, beyond perceived self-other similarity. For instance, manipulating the nature of the personal relationship with the interacting partner or his or her group membership entails variations in affective states, attention and motivation (Hewstone et al., 2002; Van Bavel & Cunningham, 2012; Voci, 2006). Therefore, the effect of this kind of variables is not without issues of interpretation and, as pointed out elsewhere (Heyes, 2014), some of the previous findings showing a modulation of the JSE by social variables might be explained, for instance, by attentional mechanisms. Furthermore, according to a recent general model of cognitive control proposed by Hommel and Wiers (2017), cognitive control oscillates between two conflicting modes that favour either the integration or the discrimination between representations. This so-called meta-control bias is a domain-general mechanism that applies to different types of representation (social and non-social) and a bias towards integration vs. selectivity would be determined by an interaction between various factors, including task constraints, motivation, and affects (Hommel & Colzato, 2017; Hommel & Wiers, 2017). On this basis, both empirical and theoretical work has suggested that, in the context of joint action, the type of relationship between co-actors, current task goal (e.g., to cooperate), and related affects may influence the ability to discriminate between self- and other-related representations by biasing the cognitive system towards integration vs. selectivity (Liepelt & Raab, 2021; Quintard et al., 2021). From there, a tentative hypothesis is that the modulation of the JSE by the social-affective relationship between co-actors demonstrated in previous studies (e.g., McClung et al., 2013; Quintard et al., 2020) was not mediated by an influence of perceived self-other similarity on the strength of the action-discrimination problem per se, but instead resulted from the establishment of cognitive control biases that affected the mechanisms allowing to resolve this discrimination problem. Further research is required to test this admittedly speculative hypothesis.
Whether social cognitive abilities and behaviours are subserved by domain-general or socially-dedicated processes is a central question for current research on human-human and human–robot interactions (Cross & Ramsey, 2021; Nielsen et al., 2015; Ramsey & Ward, 2020). Recent empirical and theoretical work has highlighted a major and so far underestimated role of domain-general processes in social cognition by demonstrating how they may contribute to the generation of responses in social cognition paradigms (Darda et al., 2020; Heyes, 2014; Qureshi & Monk, 2018; Ramsey & Ward, 2020). Attentional cueing, as one example, has been advanced to account for perspective taking phenomena (Heyes, 2014). In joint action research, the referential coding account illustrates such a deflationary position by explaining the JSE in terms of general processes of action and event coding. In the present article, we favoured this hypothesis as it offers a parsimonious explanation of various findings, especially the occurrence of JSEs with both human and non-human agents (as found in our experiments) or JSE-like phenomena with artificial objects. However, as an alternative to the hypothesis that self-other similarity at the level conceptual/abstract features may contribute to the action-discrimination problem at the origin of the JSE, we suggest that biases in domain-general cognitive control parameters may account for the previously reported influence of social variables on the JSE.
Finally, in both experiments, our manipulation based on a verbal interaction was successful in inducing changes in the perceived humanness of the robot. It is one thing to induce changes in the perceived humanness of a robot; it is quite another to specify the mechanisms or critical aspects of the manipulation that governed these changes. Indeed, there are several possible explanations for the effect of the verbal exchange on the perceived humanness of the robot. For instance, the effect could be driven by participants’ perception of a human (communicative) capacity in the robot. Also, recent work contrasting the engagement of brain networks while participants conversed with another human or a robot revealed differences in networks associated with lower level perceptual processes, but not in areas supporting higher level processes such as theory of mind (Hogenhuis & Hortensius, 2022). Thus, conversing with a robot may engage mentalizing systems, which could imply the ascription of specific features (e.g., thoughts, agency) to the robot. Furthermore, in the social robot condition, the robot executed gestures during the verbal exchange with the participant. Thus, one may ask whether the increased perceived humanness in the social robot condition (relative to the non-social robot condition) was related to the verbal exchange per se or to the combination of verbal and non-verbal behaviors 3 (Salem et al., 2012). Importantly, this uncertainty regarding the origin of the changes in perceived humanness induced by our manipulation does not question the validity of the manipulation itself.
Conclusion
The ability to represent and coordinate with others’ actions is crucial in the context of task sharing. The two experiments of this study show that, under certain conditions, when sharing a task with a robot, the action performed by this agent is integrated in our representation of the task scenario and influences our own performance. Moreover, both experiments indicate that this self-other integration process does not depend on the perceived humanness of the robotic agent. This finding contradicts current models of joint action performance, according to which perceived self-other similarity is a crucial determinant of joint action effects. Further research is needed to determine both the critical factors that affect self-other integration in shared task settings and related-underlying mechanisms.
Supplemental Material
sj-docx-1-qjp-10.1177_17470218231158481 – Supplemental material for Joint action with human and robotic co-actors: Self-other integration is immune to the perceived humanness of the interacting partner
Supplemental material, sj-docx-1-qjp-10.1177_17470218231158481 for Joint action with human and robotic co-actors: Self-other integration is immune to the perceived humanness of the interacting partner by Cédric A Bouquet, Clément Belletier, Sophie Monceau, Pierre Chausse, Jean-Claude Croizet, Pascal Huguet and Ludovic Ferrand in Quarterly Journal of Experimental Psychology
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the IDEX-ISITE initiative16-IDEX-0001 (CAP 20-25) of Université Clermont Auvergne.
Ethical statement
This study was approved by Ethics Committee for Research Involving Humans of the University Clermont Auvergne (CER IRB UCA, Authorisation #IRB00011540-2019-44) and was carried out in accordance with the ethical standards set out in the 1964 Declaration of Helsinki.
Data accessibility statement
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.