
Abstract
This article develops a four-level test system for accurately evaluating pavement compaction performance of autonomous articulated vehicles. In the evaluation layer, various performance indicators are evaluated, including the stability, rapidity and accuracy of trajectory tracking, and the ratio of required compaction to actual compaction once and twice and compaction repeatability index when pavement compaction. The guidance and control layer can be described in terms of theory and application. At the theoretical level, the line of sight guidance algorithm and incremental proportional integral control algorithm are introduced to eliminate system control lag. Among them, the best line of sight guidance and incremental proportional integral control parameters are selected by the Elitist strategies genetic algorithm, and the initial parameters are set according to human driving experience initial control parameters. At the application level, the BECKHOFF controller, a kind of programmable logic controller, acts as the main guidance and control unit in the four-level control system, fixed speed is given to the autonomous articulated vehicle by setting the engine speed and transmission gear, and steering wheel angle is adjusted in real time by the BECKHOFF controller. In the sensor level, a simplified sensor configuration is used to reduce overall cost. The comparative simulation results of no controller, the incremental proportional integral controller, line of sight guidance-incremental proportional integral controller with human driving experience initial control parameters, line of sight guidance-incremental proportional integral controller with random initial control parameters, and elitist strategies genetic algorithm-line of sight guidance-incremental proportional integral controller with human driving experience initial control parameters manifest evidently that the proposed elitist strategies genetic algorithm-line of sight guidance-incremental proportional integral controller with human driving experience initial control parameters has almost no steady-state error, no overshoot, and short settling time. Field results show that ratio of required compaction to actual compaction once achieves 100%, ratio of required compaction to actual compaction twice achieves 94.6%, and compaction repeatability index achieves 35%.
Keywords
Introduction
Related works and motivations
With the rapid development of artificial intelligence, a variety of traditional industries, including transportation, manufacturing, and medical treatment, are gradually being reformed in recent years. Pavement compaction, one of the most important traditional industries, is of great demand in China every year, but artificial pavement construction faces many problems. First, labor costs are getting higher and higher, and skilled workers are getting fewer and fewer. Second, the autonomous construction vehicles have a 24/7 capacity, which cannot be achieved by human driving. Third, pavement compaction requires the autonomous construction vehicles to go back and forth along a preset path, but human driving cannot guarantee highly repeatable pavement compaction. In addition, human driving misoperation may cause safety accidents. Consequently, autonomous driving has great prospects in the pavement construction field.
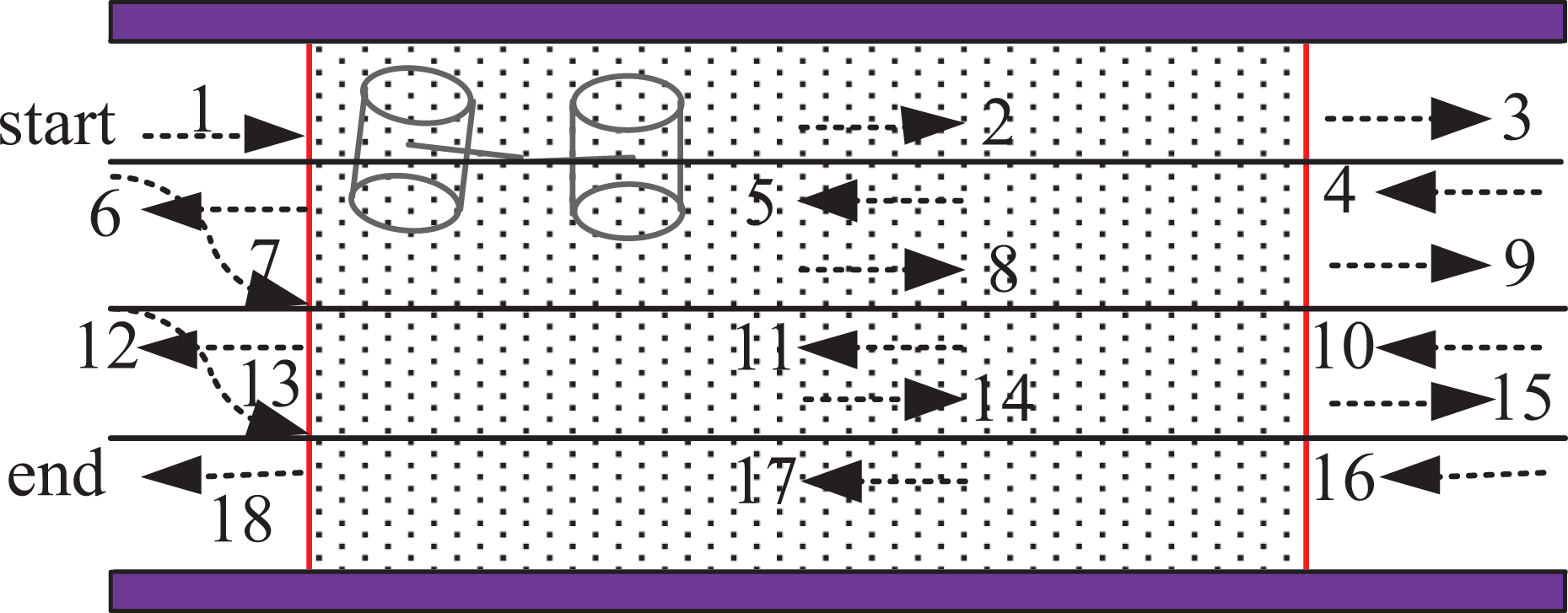
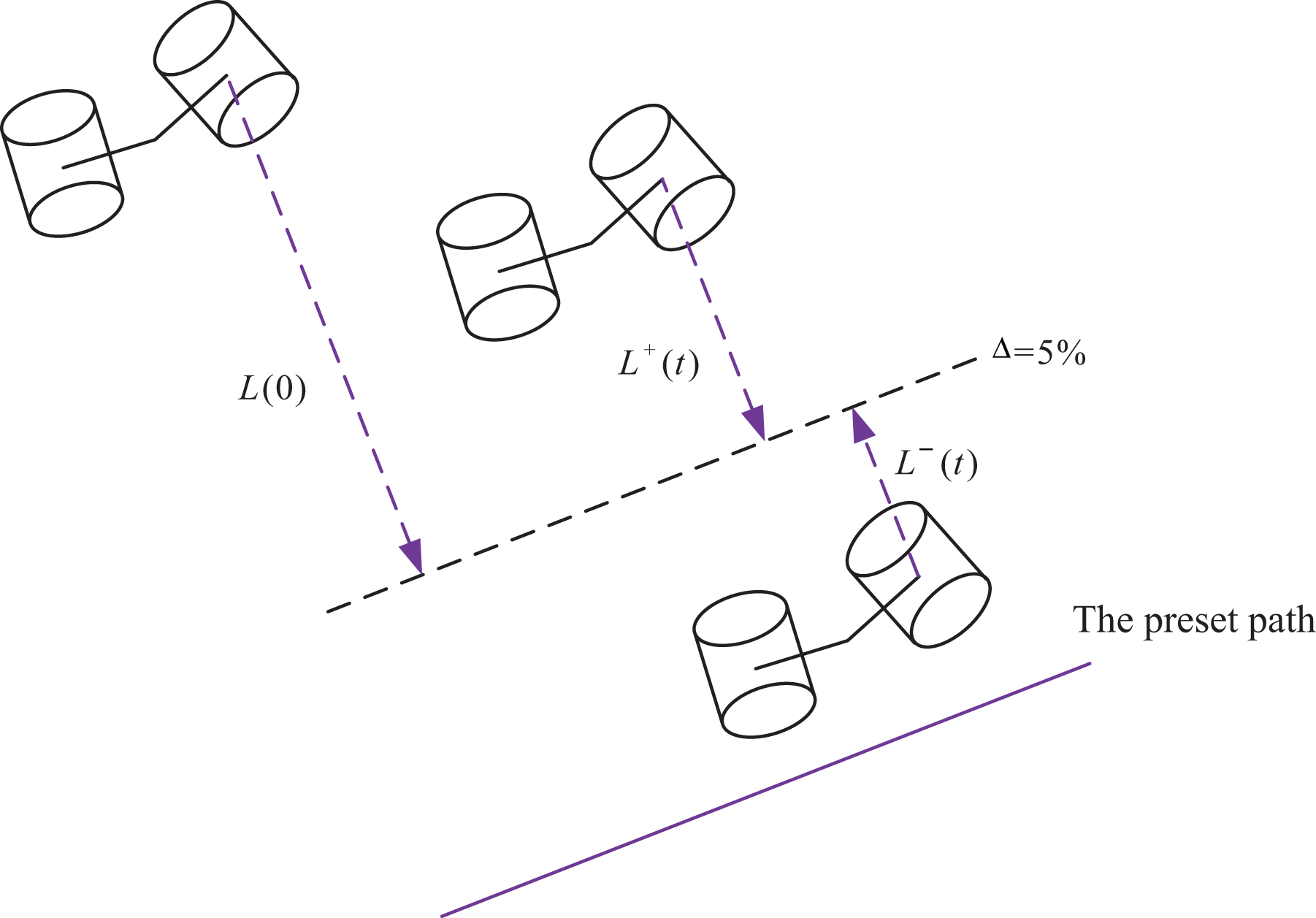
The motivation of this article comes from unmanned asphalt pavement construction. As shown in Figure 1, to compact the rectangular area filled with black dots, autonomous articulated vehicle (AAV) needs to sequentially track three paths composed of black straight lines in numerical order. As the AAV steel wheels are not allowed to hit the curbstone marked with thick purple lines, it is required that no overshoot occurs when vehicle trajectory tracking. In addition, AAV usually needs to track the preset path at a constant speed to ensure the effect of road compaction. Based on the requirements mentioned above, the following indicators need to be paid attention to:
Control variables: The steering angle is the only control variable because AAV follows the preset paths at a constant speed in the construction area.
Control performances: Non-overshoot trajectory tracking indicators need to be achieved to ensure construction safety.
Evaluation indicators: In addition to stability, rapidity and accuracy usually considered in vehicle trajectory tracking, pavement compacting performance indicators including the ratio of the required compaction to actual compaction once and twice and compaction repeatability index are also crucial. Besides, the compaction repeatability index is also of significance and needs to be between 30% and 40%.
Experimental scene.
As shown in Figure 1, the primary issue of pavement construction is trajectory tracking, which has been widely studied in traditional control theory. As a traditional control method, PID controller has been widely used in autonomous vehicles. 1,2 In Alshaer et al., 3 the traditional PID controller is used to track the trajectory of a loader, and experiments show that the lateral error is less than 50 cm at a fixed speed. In Alouache and Wu, 4 a fuzzy logic PD controller is presented for trajectory tracking of wheeled mobile robots, Miao and Cebon 5 establish two ground-watching navigation systems with cameras to calculate off-tracking distance and adopt the traditional PID controller for trajectory tracking. In the work of Khalaji, 6 a PID-based tractor-trailer kinematics model is proposed to follow the desired trajectories. However, these controllers cannot meet the demand of non-overshoot control.
The use of advanced control theory for trajectory tracking has also been a hot topic in recent years 7–8 . Nayl et al., 10 Kayacan et al., 11 and Bai et al. 12 use model predictive control for an articulated vehicle and an articulated unmanned ground vehicle respectively. Tanakitkorn et al., 13 Keymasi Khalaji and Moosavian, 14 and Nayl et al. 15 present novel sliding mode control schemes that achieve better tracking performance and quickly minimize corresponding tracking error. In the work of Dekker et al., 16 the iterative learning control is applied to center-articulated underground mining vehicle. A switching modeling and control framework is developed to cope with the effect of varying slip angles in the study by Nayl et al. 17 Bouyarmane et al. 18 propose quadratic programs to handle multi-robot systems. Rimmer and Cebon 19 present a path-tracking controller for automating the reversing of multiply-articulated vehicles. A roll stability controller is introduced to improve roll stability in transient maneuvers in the study by Cheng et al. 20 Compared with traditional control theory, advanced control theory has faster convergence speed, higher precision, and better tracking performance. However, these methods are highly complex and pose a great challenge to the performance of the controller.
Line of sight (LOS) guidance has been widely used in the field of marine vessels trajectory tracking due to its simplicity and intuitiveness: It imitates the helmsman to steer the vessel toward constant distance ahead of the vessel along the desired path. Fossen and Pettersen 21 present the stability proof for a class of proportional LOS guidance for vehicle trajectory tracking. Liu et al. 22 present drift angle compensation-based adaptive LOS trajectory tracking for underwater vehicle. In Nie and Lin, 23 integral LOS guidance law and adaptive fuzzy trajectory tracking controller is proposed to deal with time-varying sideslip angle of underactuated marine surface vessel. In Abdurahman et al., 24 course control and speed allocation of modified LOS guidance is used for environmental disturbance rejection. In Abdurahman et al., 25 variable distance ahead of the vessel is taken into account in case of large cross-track errors.
In short, LOS guidance can make a priori decision for other traditional controllers and experiments have shown that the combination of LOS guidance and some traditional controllers significantly improve the effect of trajectory tracking.
The main contributions
Compared to the above-related works, the present article addresses three main contributions that are given as follows.
First, the EGA-LOS-IPI controller is proposed for AAV trajectory tracking. This article combines LOS guidance and the incremental proportional integral (IPI) controller for trajectory tracking, and Elitist strategies genetic algorithm (EGA) is used for searching the best proportional and integral parameters of the IPI controller and the radius parameter of LOS guidance. Aiming at non-overshoot trajectory tracking control needs, we also design a novel EGA fitness function according to project needs. In addition, to avoid EGA falling into the local optimal solution, initial parameters are chosen by human driving experience.
Second, the EGA-LOS-IPI AAV control system is tested on the MATLAB simulation platform. AAV kinematics model is built and AAV steering system dynamics is determined through field experiments.
Third, a four-level system is built to accurately evaluate the pavement compaction effect of an AAV of the type DYNAPAC CC6200.
The rest of this article is organized as follows. The second section introduces the proposed four-level test system in detail. The third section demonstrates simulation experiments and results. The fourth section shows the field experiments and results. The fifth section gives conclusion and further investigations.
Four-level test system for evaluating pavement compaction performance
Overview of the proposed test system
As shown in Figure 2, the EGA-LOS-IPI controller-based four-level cost-effective DYNAPAC CC6200 AAV pavement compaction system consists of four layers, including the evaluation layer, the guidance layer, the control layer, and the sensor layer.
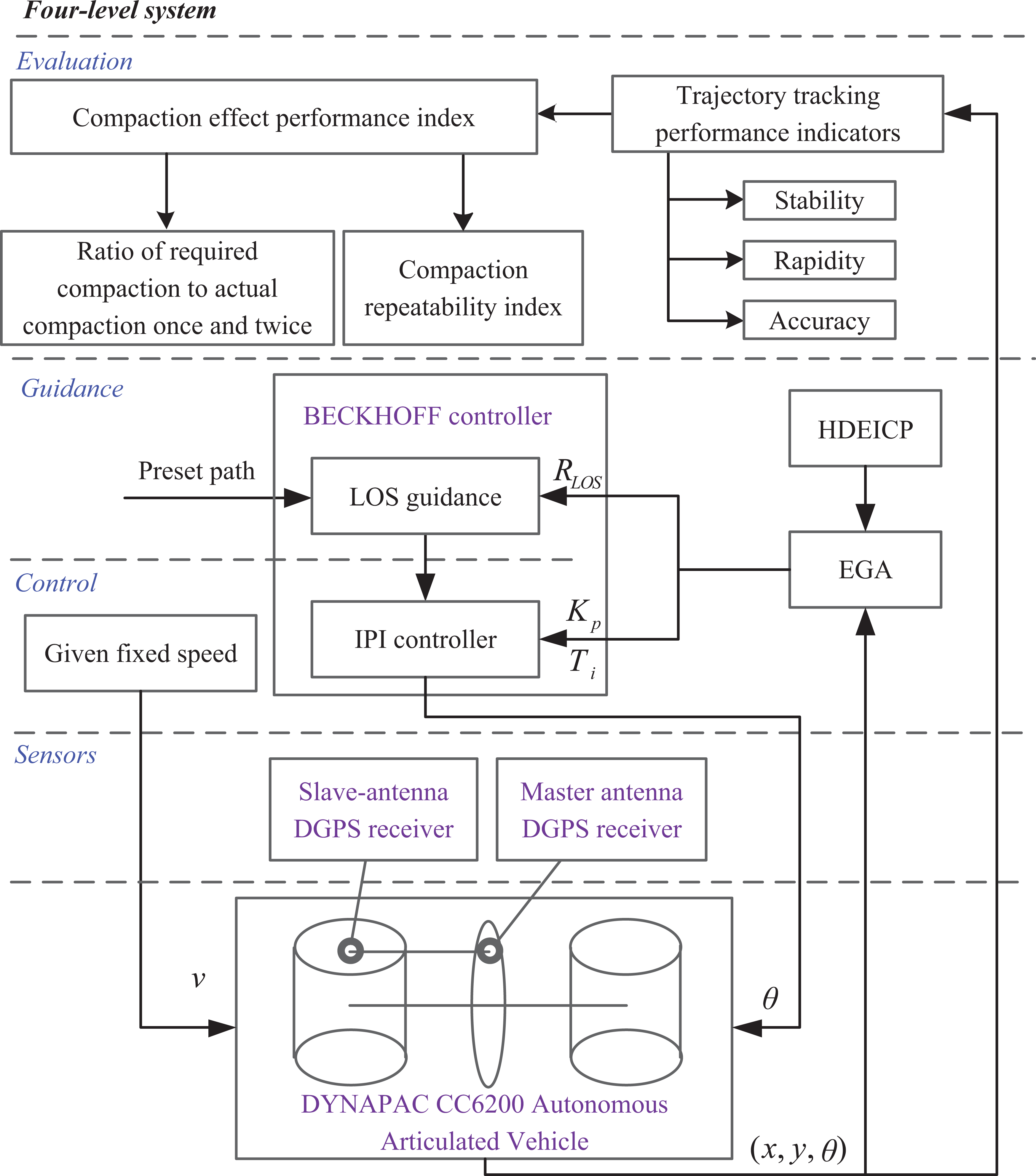
The framework for EGA-LOS-IPI controller-based four-level cost-effective pavement compaction system. EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral.
In the evaluation layer, the performance indicators of trajectory tracking effect of preset paths, including stability, rapidity and accuracy, and compaction effect index, including ratio of required compaction to actual compaction once and twice and compaction repeatability index for the compaction area, need to meet project needs.
The guidance and control layer can be described in terms of theory and application. At the theoretical level, the LOS guidance algorithm and IPI control algorithm are introduced to eliminate system control lag. Among them, the best LOS guidance and IPI control parameters are selected by the EGA, and the initial parameters are set according to human driving experience initial control parameters (HDEICP). At the application level, the BECKHOFF controller, a kind of programmable logic controller (PLC), acts as the main guidance and control unit in the four-level control system, fixed speed is given to the AAV by setting the engine speed and transmission gear, and steering wheel angle is adjusted in real time by the BECKHOFF controller.
In the sensor layer, a simplified sensor configuration is used to reduce overall cost. The DGPS receiver equipped with a master antenna and a slave antenna along AAV longitudinal axis measures AAV course, and precious AAV positioning is performed using only the master antenna.
AAV kinematics model
As shown in Figure 3, the geometry of the AAV kinematic model put into the Gaussian coordinate system can be divided into two parts, each linked with a rigid free joint, with lengths lf and lr respectively, each with a steel wheel. The steering action is executed on the central hinge by changing the articulated steering angle γ. vf and vr are perceived as the same changes regarding the speed of the rigid free joint of the vehicle. θf (θr) is defined as the angle between the front (rear) wheel and the positive x-axis.

The geometry of the AAV kinematic model. AAV: autonomous articulated vehicle.
Based on AAV kinematic model mentioned above and taking forward movement as an example, the state changes of the front wheel

Assuming that there is no lateral and vertical slip of AAV, the speed perpendicular to vf and vr direction is 0, the following expression can be obtained as

Based on equation (1) and (2), AAV kinematics model is:

where ωγ is the articulated steering angular speed.
AAV steering dynamic model
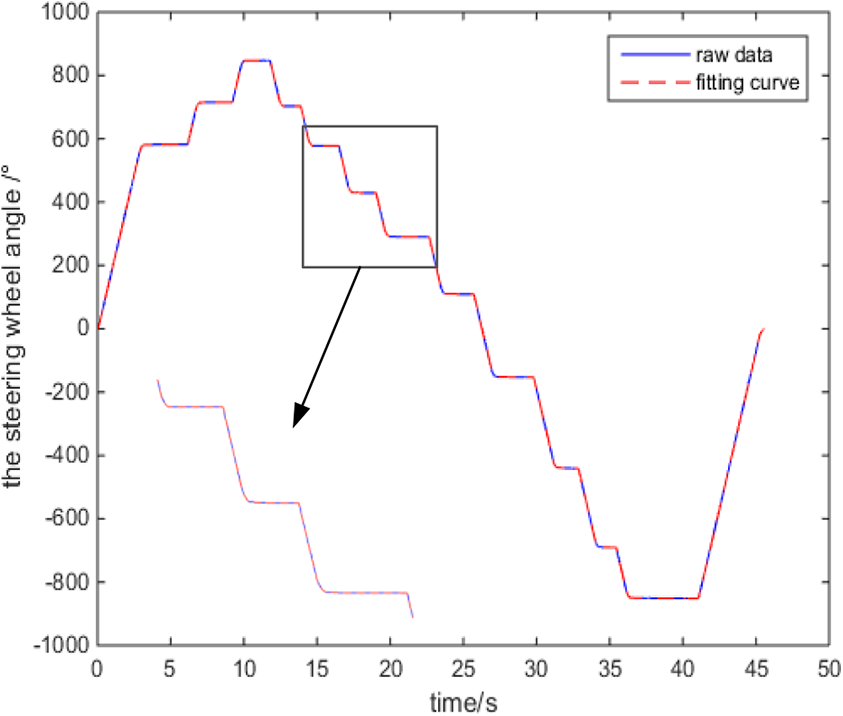
AAV steering system is a hydrostatic system. The steering wheel is connected to a steering valve to deliver fluid flow to the steering booster cylinder at the articulated joint. Since this steering mechanism causes control lag, the control angle output in each control cycle cannot directly control AAV articulated steering angle. In this case, field experiments are carried out to construct AAV steering dynamic model. We turn the steering wheel and record its angle over time. 27

Figures 4 and 5 show small and large angle change test of the steering wheel and its fitting curve, respectively, and the positive and negative 850° change in steering wheel angle is proportional to the positive and negative 14° change of AAV steering angle. The least squares fitting is used to find the optimal parameters. After calculation, the parameter T is 3.3 s and the parameter K 2 is 198.
Small angle change test of the steering wheel and its fitted curve.

Large angle change test of the steering wheel and its fitted curve.
LOS guidance
LOS guidance draws a circle of fixed radius Rp
with the point
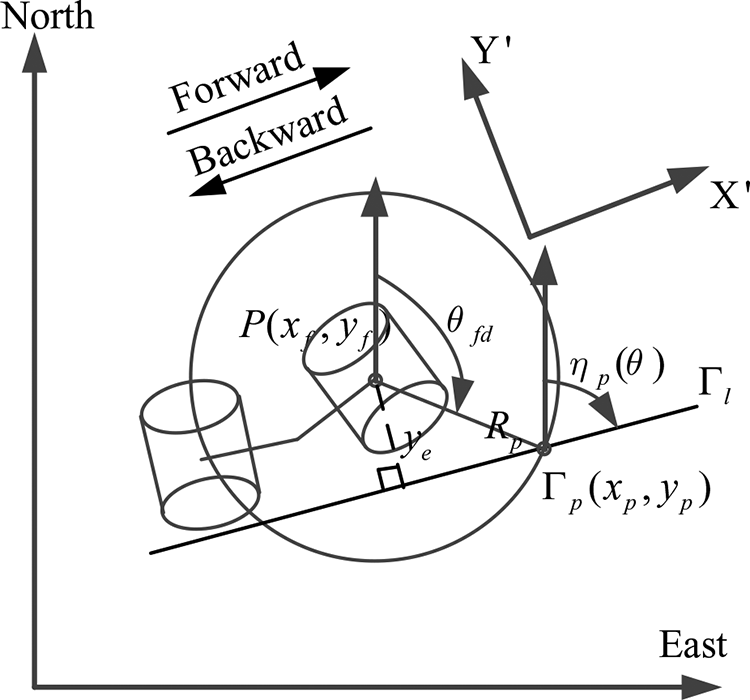
The principle of line of sight guidance.
Proposition 1
LOS guidance stability analysis.
When LOS guidance law is

the tracking error
Proof
See Appendix 1.
Incremental proportional integral control
Inferred from Proposition 1, the tracking error should be exponentially asymptotically stable with LOS guidance and proportional control. However, due to the control lag caused by the steering mechanism, the control angle output by the controller in each control cycle cannot control the AAV joint steering angle in real time. PI position control integrate all past deviations, therefore, this control strategy is not only computationally expensive but also causes a large change in the actuator when the controller fails, which is not permitted in practice. In this article, IPI control is used for trajectory tracking and the mathematical expression is as follows

where
Elitist strategies genetic algorithm
Simple genetic algorithm (SGA) is searching the optimal solution by simulating natural evolution process. Its probabilistic optimization method adaptively adjusts the search direction without certain rules. First, the parameter set is encoded and the population is initialized, and then, fitness function is calculated and the algorithm is judged whether the termination condition is reached, if the algorithm does not meet the termination condition, selection, crossover, and mutation are used to generate new populations. Unlike SGA, EGA retaining the best individuals in the group to the next generation with probability 1. EGA flow chart is shown in Figure 7.

EGA flow chart. EGA: Elitist strategies genetic algorithm.
Integral square error, integral absolute error (IAE), integral time absolute error, and integral time square error are often used to evaluate error performance. In addition to the traditional IAE evaluation index, EGA fitness function also introduces the maximum function as the evaluation index to completely avoid trajectory overshoot and make the trajectory reach the settling time as fast as possible. The EGA fitness function is shown in equation (7)

where

Definition of
Constant weight coefficients ω1 and ω2 are used to calculate vehicle state deviation and control deviation, a huge weight coefficient ω3 is given to avoid overshoot during trajectory tracking, and a relatively small weight coefficient ω4 is introduced to reduce settling time.
Simulation experiments and results
Simulation parameters
Five different control algorithms, including IPI controller, LOS-IPI controller with HDEICP, EGA-LOS-IPI controller with random initial control parameters (RICP), and EGA-LOS-IPI controller with HDEICP, are tested under DYNAPAC CC6200 parameters and HDEICP, as shown in Table 1.
DYNAPAC CC6200 parameters and HDEICP.

HDEICP: human driving experience initial control parameters.
Tracking along the current trajectory
When AAV tracks the first preset trajectory, there may be small lateral and angular deviations. In this case, 0.1 m initial lateral deviation and 5°/0°/−5° initial angular deviation are set. Figure 9 shows the best fitness values and the best variables using EGA-LOS-IPI with HDEICP when the population size is 100 and the generation is 200. In this figure, AAV speed is set to 2 m/s and the initial deviation are 0.1 m and 0°.

The best fitness values and the best variables using EGA-LOS-IPI with HDEICP. EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral; HDEICP: human driving experience initial control parameters.
Figure 10 shows LOS-IPI controller with HDEICP, EGA-LOS-IPI controller with RICP, and EGA-LOS-IPI controller with HDEICP, where green line, red line, and blue line indicate 5°/0°/−5° initial angular deviation. Experiments show that only EGA-LOS-IPI controller with HDEICP meets demand.

The performance of three different controllers.
Lane change trajectory tracking
When AAV turns to the next designed trajectory, there may be large lateral and angular deviations. Figure 11 shows the best fitness values and the best variables using EGA-IPI with HDEICP when the population size is 100 and the generation is 100. In this experiment, AAV speed is set to 2 m/s and the initial deviation are 1 m and 0° degree. The best and the average fitness value are basically the same, which means that the parameters obtained by EGA have converged.

The best fitness values and the best variables using EGA-IPI with HDEICP. EGA: Elitist strategies genetic algorithm; IPI: incremental proportional integral; HDEICP: human driving experience initial control parameters.
Figure 12(a) shows the performance of no controller, IPI controller with HDEICP, and EGA-IPI controller with HDEICP under the condition of 1 m initial lateral deviation and 0° initial angular deviation. Experiments show that due to the delayed effects of vehicle longitudinal following system, no controller causes trajectory tracking oscillation and the performance of IPI regulator is not good even under optimal parameters. In this case, LOS guidance is introduced, and 1/2/3 m initial lateral deviation and 5°/0°/−5 initial angular deviation are set to test the performance of LOS. It can be inferred from Figure 12(b) that LOS-IPI controller with HDEICP can effectively track the desired trajectory, but the trajectory has a different steady-state error under different initial deviation. In Figure 12(c), EGA-LOS-IPI controller with HDEICP has almost no steady-state error, no overshoot, and short settling time.

The performance of five different controllers: (a) no controller, IPI controller with HDEICP, EGA-IPI controller with HDEICP, (b) LOS-IPI controller with HDEICP, and (c) EGA-LOS-IPI controller with HDEICP. EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral; HDEICP: human driving experience initial control parameters.
As shown in Figure 13, AAV articulated steering angle and target angle also have a fast converge under EGA-LOS-IPI controller with HDEICP.

AAV articulated steering angle (a) and target angle (b) using EGA-LOS-IPI controller with HDEICP. AAV: autonomous articulated vehicle; EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral; HDEICP: human driving experience initial control parameters.
Quantitative indexes including stability, rapidity, and accuracy of trajectory tracking for the five controllers are described in Table 2. The proposed EGA-LOS-IPI controller not only has no steady-state error and no overshoot but also the settling time is much better than the other controllers.
Quantitative results for the five controllers.

AAV: autonomous articulated vehicle; EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral; HDEICP: human driving experience initial control parameters.
Trajectory tracking with angle noise
To further verify the robustness of the proposed EGA-LOS-IPI algorithm, angle noise

Trajectory tracking with angle noise.
Field experiments and results
Four-level hardware platform
EGA-LOS-IPI controller-based four-level hardware platform is shown in Figure 15. In the evaluation layer, the laptop receives data from the BECKHOFF controller and autonomous construction software is designed to show the expected trajectory and AAV position. In the guidance and control layer, the BECKHOFF controller makes decision via the proposed EGA-LOS-IPI algorithm, and controls the driving mechanism through the CAN bus to turn the steering column, which in turn turns AAV steering wheel. In the sensor layer, real-time kinematic (RTK) positioning technique using master–slave antenna is adopted in this field experiments.

EGA-LOS-IPI controller-based four-level hardware platform. EGA: Elitist strategies genetic algorithm; LOS: line of sight; IPI: incremental proportional integral.
Tracking of a preset trajectory
When AAV moves at climbing speed, the Kp parameter, the Ti parameter, and the LOS radius parameter obtained by the EGA are 1.0, 1.0, and 3.7 m under the condition of 0.72 m and −10.72°initial deviation, and 1.2, 0.8 and 4.0 m under the condition of 0.96 m and −0.04°initial deviation. As shown in Figure 16, the proposed EGA-LOS-IPI controller-based four-level system can quickly track the preset trajectory, and the settling time is 6.64 s and 6.32 s, respectively. Trajectories in Figure 16 have burred feature because of GPS positioning error 28 and the BECKHOFF controller accuracy.

Trajectory tracking of one preset path at climbing speed.
When AAV moves at working speed, parameters selected by EGA are not fit well. The main reasons may include the uncertainty of the system and the uncertainty of external disturbance. The uncertainty of the system because MATLAB simulation experiments ignore vehicle mass, the uncertainty of the road surface, and various types of friction. The uncertainty of external disturbance includes the possible short-term drift of DGPS positioning. These uncertainties increase as the vehicle speed increases.
Pavement compaction
Figure 17 shows trajectories and pavement compaction effect, where the area surrounded by the red rectangle is the area to be constructed, trajectories and corresponding compaction area are marked with the blue dotted line and the area composed of magenta lines separately. Pavement compacted once and twice are highlighted in light and dark gray separately. Field experiments show that ratio of required compaction to actual compaction once achieves 100%, ratio of required compaction to actual compaction twice achieves 94.6%, and compaction repeatability index achieves 35%.
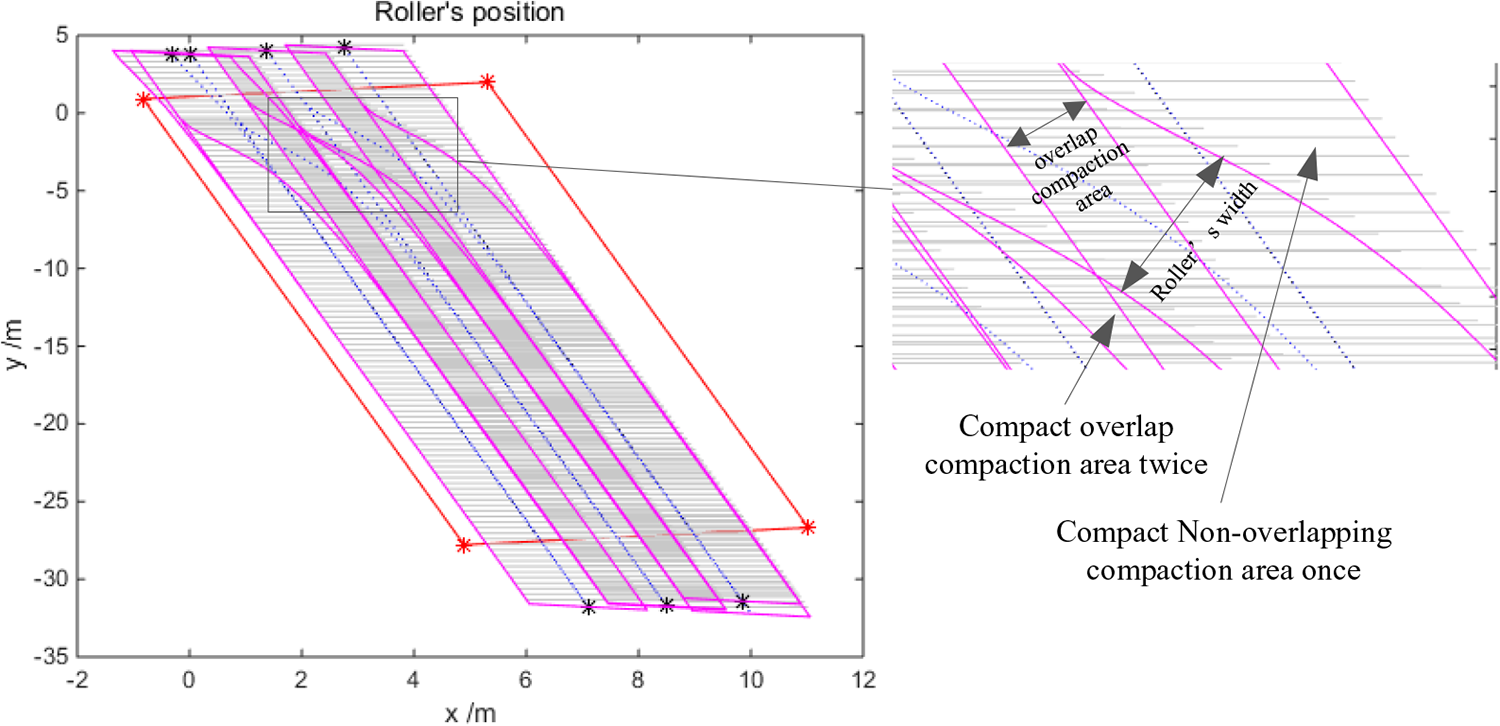
Trajectories and pavement compaction effect.
Conclusions
The EGA-LOS-IPI controller using HDEICP proposed in this article has good tracking performance and robustness, and simulation and field experiments show that it adapts to different initial conditions.
In further research, sensors used for detecting the compaction quality of pavement need to be installed on the roller to perform real-time online monitoring. In addition, vision-based or laser-based sensor is adopted when it comes to tunnel pavement construction.
Footnotes
Acknowledgement
The authors would like to thank the reviewers for their valuable suggestions for improving the quality of the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Jiangsu Province under grant BK20170681.