
Abstract
Sometimes the automation equipment cannot solve all the problems for industrial enterprises, and human workers cannot be replaced by machines in production activities. The possibility that the workers develop work-related musculoskeletal disorders, while performing high intensity and repetitive installation and commissioning work over a long period of time, is very high. A mechanical design of a passive upper extremities exoskeleton suit to reduce the muscles effort of upper limbs is proposed in this article. Thereby, a decrease in the work-related musculoskeletal disorders risk is expected. To evaluate the ergonomic contribution of the passive upper extremities exoskeleton suit, both static and dynamic tool lift experiments were designed, in which 10 volunteers were asked to participate in the experiments. The surface electromyography is captured from these volunteers to measure the magnitude of muscle output forces that are applied with and then without passive upper extremities exoskeleton suit assistance during the process of manual handling, and the tests are collected for comparison. Results show that there is a significant decrease in the output force and fatigue in deltoid, biceps brachii, and brachioradiali, especially in biceps brachial which is up to 67.8%. The implementation of passive upper extremities exoskeleton suit is not only a benefit to reduce workers’ upper extremities fatigue but also ultimately increase the work efficiency by minimizing work-related musculoskeletal disorders and safety accidents.
Introduction
To enhance international industrial competitiveness, efforts have been made by engineers to develop and improve the automation and mechanization for the factories. The use of automated devices in some situations can solve many problems, but this does not apply to all industrial scenarios. 1 For example, subjective judgment, agile movement, complex gestures, and precision grasp (Figure 1) might be required in some workstations and can only be performed by human. Current automation technologies present many limitations on feasibility, perception, speed, or flexibility. Therefore, in the industrial field, workers are still involved in a wide range of flexible assembly, precision commissioning, hand-polishing operations, and other production activities, 2 exposing them to the associated risks for developing work-related musculoskeletal disorders (WMSDs).

The workstations that automated devices are not always feasible in industry. For example, subjective judgment, agile movement, complex gestures, and precision grasp.
WMSDs are a prevalent health problem that greatly affects a worker’s quality of life. Because of the repetitive movements, awkward postures, and tools holding, there are more than 50% of American workers who are affected by WMSDs in the United States each year. 3 In the European Union, every year more than 40% of the workers accuse shoulder pain or low back pain. 4 In Dutch, a total of 26.6% of the workers reported back pain quite often. 5 These data are relatively stable over the past decade; WMSDs still plague a significant amount of people. In China, more than 60.9% of the machinery workers suffer from WMSDs such as neck and shoulder pains, carpal tunnel syndrome, and tendonitis. 6
Compared to treatment on WMSDs, it is better to address the causes of negative effects on the muscles by giving external help to the human effort. 7 There is a fast-growing movement in modern industry for human–robot collaboration to improve the use of robots while maintaining human flexibility. 8 For manual processing tasks, an available solution is to use wearable exoskeleton suits, which can provide proper external assistance, making it possible to reduce the risk of WMSDs. The exoskeleton is an intelligent auxiliary device, a cooperative robot (cobots), that assists humans to accomplish tasks and has various auxiliary functions to the human body. A variety of exoskeleton robots with different purposes have been developed. In the military field, Kazerooni et al. 9 –11 have carried out a series of studies on exoskeletons designed for lower limbs, such as Berkeley Lower Extremity Exoskeleton, ExoHiker, Fortis, and Human Universal Load Carrier. The soldier’s carrying load is transferred to the ground through the exoskeleton so that the soldiers could carry more loads. The exoskeleton can also be used as an assistive device for the elderly or for upper body/lower body rehabilitation in health-care centers. A hybrid auxiliary limb proposed by the University of Tsukuba is an enhanced systemic exoskeleton using electromyography (EMG) control and motor drive. 12 Naruse et al. use a simple one-degree-of-freedom exoskeleton to function in the lower extremities to help workers working in the lift station. 13 In terms of industrial applications, Honda Research has developed a lightweight seat-type exoskeleton system that can reduce workers’ fatigue during work that involves squats. 14 Queen’s University in Canada developed a passive personal lift-assist device. It is powered by elastic energy that is stored in the back of the wearer’s body when the wearer bends over to assist and support his or her back. 15,16 Vrije Universiteit Amsterdam has developed a passive exoskeleton (Laevo, Delft, the Netherlands) that uses the energy stored in and released from the elastic elements of the waist to assist the lower back muscles of the human body. 17 At present, there are more and more researchers showing the interest in industrial exoskeleton fields.
A mechanical design of a passive upper extremities exoskeleton suit (PUES) to reduce the upper limb muscles effort, which might decrease the risk of WMSDs, is proposed in this article 18 (Figure 2), which is similar to Fortis but improved with smaller and lightweight gas springs. 19 The PUES can alleviate upper extremities fatigue for both men and women during long installation and commissioning work. There are two main parts that comprise the structure of PUES. The first part is the exoskeleton body, which weighs 2.0 kg. It can be worn by the wearer and will adapt to the wearer’s body movements. The purpose of this part is to carry the loads or tools while maintaining the movement freedom of the body. The counterweights are on the back of exoskeleton body, so the wearer will be able to put their own counterbalance weight onto PUES. The second part of PUES is thepassive gravity balance arm (PGBA), which weighs 1.1 kg. One end of PGBA is connected to the hip joint of the exoskeleton body. Another end is connected to and braced with a handheld tool, so the load of the handheld tool can maintain the balance in the motion range without the interference of the external force and also has the damping effect, which relieves the operator’s muscle fatigue. The total weight of PUES is 3.1 kg, and high-strength aluminum alloy is used as skeleton material. The below experiment proves that the implementation of PUES is helpful in alleviating the fatigue in the upper limbs of the workers. Thereby, a decrease in the WMSDs risk is expected.

The structure of PUES, it includes two main parts, one is exoskeleton body and the other is PGBA. PUES: passive upper extremities exoskeleton suit; PGBA: passive gravity balance arm.
Approach
Existing research findings
A number of different approaches have been proposed over the past few years to develop assistive robots or devices. Several wearable robots have been presented by Sylla and Carmichael. 20,21 These upper limb exoskeletons have a good supporting effect on the arms in the work process. And some nonwearable devices are developed by Barzilay et al. 22,23 Nonwearable auxiliary devices are mainly used to help people with neuromuscular disorders that cannot move their arms through muscle strength. These devices are usually fixed on the side of the wheelchair and can support the patient’s arm. Particularly, the Russo 24 method encourages the end effector of the device to fit only the forearm and can use the support bracket to transfer force. Being comfortable to wear is an essential factor for the wearable exoskeleton robot, as it is not designed to apply to certain body parts, including the elbows and shoulders, and helps to achieve good comfort. In addition, when the patient moves his arm by using an extension spring, it generates a constant upward force. As the spring has energy conservation features, no other power source (such as electricity) is required, so the only necessary thing to do is to constantly fine-tune the spring. Although this method has some advantages, it is not easy to change the force exerted. Industry workers can also benefit from the design, which adjusts the equilibrium position of the spring element in real time to generate an appropriate assistance force. Thus, it could be a suitable assistive device to work with.
Fundamental design
PUES is composed of PGBA and exoskeleton body. Passive gravity balance is designed for the PGBA to be able to maintain its balance within its range of activity without interference from external forces. The basic principles are the following two methods—first, the center of mass of the entire system is always in a constant position; second, the total mechanical energy of the system is always constant. During the PGBA design process, using the spring with the appropriate spring constant, the mechanical energy of the entire system is always constant. The passive balance mechanism is used to connect the lower extremities exoskeleton mechanism with the handheld tool and achieve the following functions: Ensure that the handheld tool can move flexibly within the horizontal space. Offset the gravity effect and suspend the handheld tools in a suitable operational height in front of the wearer. Can be applied to different weights of handheld tools. Within a certain vertical distance, the handheld tools can be moved up and down vertically with less hand effort and can be suspended at any position. Reduce the vibration damage from some hand tools, such as a pneumatic screwdriver.
To achieve these functions, the appropriate types of springs combined with the parallelogram structure are used to make the passive gravity balance of PGBA. One end of the PGBA is attached to the hip joint of the exoskeleton body and another end is connected to a handheld tool to bear the weight of the hand tool, which also provides shock absorption to alleviate the wearers’ muscle fatigue and arthralgia.
To benefit from using gas springs and to alter the force easily, a semiactive method for control is proposed. A characteristic of the method is to apply two gas springs, which are more efficient and convenient (Figure 3). When the gas spring (free length = L [m], least extend constant = Fs [N], safety coefficient k = 1.1) is bonded at the parallelogram lever, the resultant force is

This equation shows that when b (effective lever arm of the springs) is given, the resultant braced force (G) is constant. The purpose of the gas spring is to compensate for the effects of gravity, making people easily keep the tool in the settled position. To make a static balance for PGBA, gravity is the only factor that must be considered despite the interference of external force or torque. When the static kinetic energy of the system is zero, the equation satisfies the conditions and can be expressed as follows


where m1 , m2 , and m3 are the mass of long-rods, short-rods, and tool, respectively, lc is the distance of the long-rods mass center to the hinge, r is the distance between the gas spring mounting point and the hinge, l is the length of the long rod, and g is the gravity acceleration. The opposite torques, F1 and F2 , are used as output force to the gas springs, which compensates the gravity effect.

The use of two gas springs in the tool, which can balance the weight of the hand tool.
When the tool is hanging on PGBA, which moves up and down in the vertical direction caused by external force, the change of the system kinetic energy can be neglected, and the elastic potential energy and the gravitational potential energy can be mutually transformed. The gradient of elastic potential energy that changes with the angle is defined as


where x0
is the original length of gas spring and θ is the rotation angle of parallelogram mechanism. The difference between

where
The PGBA is applied as a connection apparatus to assist workers when they are performing longtime tasks with heavy tools. In this case, exoskeleton body will bear the weight of PGBA as well as the hand tool to reduce the worker’s loads fatigue (Figure 4). The counterweights on the other side must be mounted to balance the torque caused by the hand tool and PGBA. The lower limb mechanism of PUES is composed of 12 humanoid joints, which can achieve synchronous movement of lower limb mechanisms and human legs (Figure 5). The innovative design of ankle joint of the lower limb mechanism can make ankle plantar flexion, dorsal flexion, and varus–valgus movement and will not interfere with the movement of human ankle joint. An open design on the exoskeleton and its ankle allow the operator to easily wear and remove the exoskeleton. When a worker wears PUES (standing or kneeling) at work, the exoskeleton body transfers the weight of the exoskeleton itself and the hand tools to the ground. When the exoskeleton is not worn, the weight of the tool will be borne by the worker’s upper limbs.

The exoskeleton body supports the weight PGBA and the hand tool, which alleviates the user’s efforts. PGBA: passive gravity balance arm.
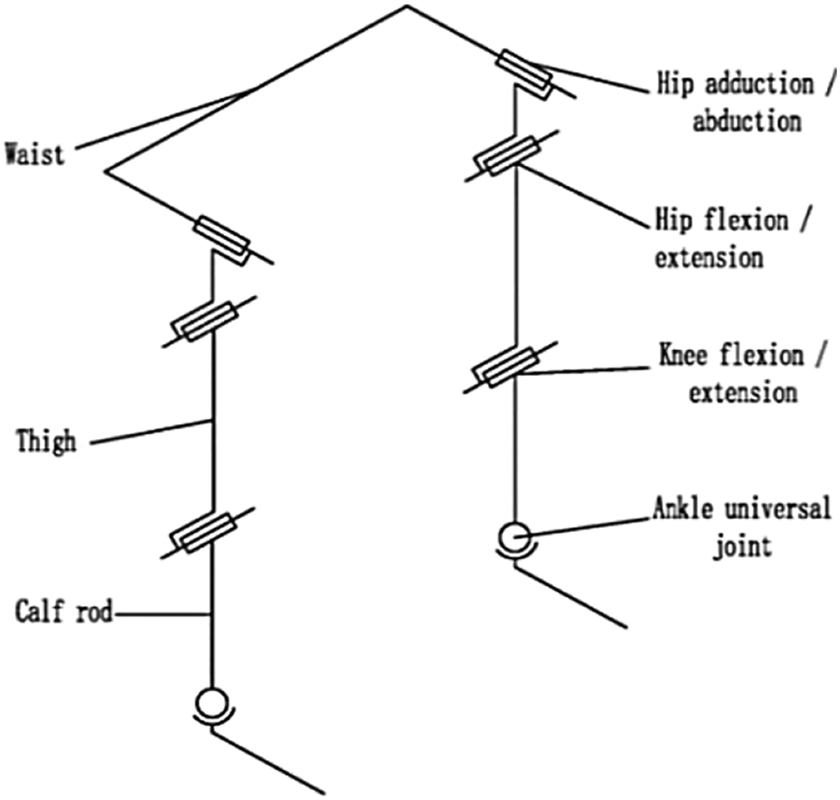
The lower extremities mechanism of PUES is composed of 12 humanoid axes, which can achieve synchronous movement of lower limb mechanisms and human legs. PUES: passive upper extremities exoskeleton suit.
Experimentation
Surface electromyography (sEMG) can be used for noninvasive sampling on muscles in multiple areas and can indicate muscle activity, fatigue, and so on. 25,26 Therefore, this study is to evaluate the effects of PUES exoskeleton by using sEMG to test the different strength and fatigue of upper extremities between wearing PUES and not wearing PUES with the same lifting load. The study was approved by the Institutional Mechanical and Automotive Engineering at the South China University of Technology.
Participants
To start the experiment, volunteers first underwent the anthropometric measurements (age, height, and weight). Then the procedures and equipment used for these experiments were elaborated. Ten right-handed male volunteers (height: 174.8 ± 7.5 cm, weight: 68.3 ± 8.5 kg, age: 24.7 ± 6.4 years old) who had no fatigue or pain in the upper limbs in the past 3 months and also had not engaged in any strenuous exercise in past 24 h before the experiment took part in the experiment. Volunteers were informed regarding the details of the experiment and signed the consent for the experiment.
Protocol
The test results of volunteers doing the tasks in the sagittal plane under device (PUES/no-PUES) conditions were compared. Each wearer often maintains a fixed arm position at a certain angle or keeps moving the arm up and down when he/she is using the handheld tool at work. So both the static load state and dynamic load state are selected. In the beginning of each test, a period of quiet EMG was recorded to remove any baseline noise before lifting the load. In the tests of static load state (static load test), the volunteers held in their hands a pneumatic screwdriver (as a handheld tool) weighing 5 kg in the sagittal plane, at θ1
and θ2
angle(θ
1 = 55° and θ
2 = 50°)as Figure 6 showed. The excitatory muscles and the cooperative muscles in the flexor muscle of the upper limb are the two biceps and the brachial radial muscle.
27
The antagonist muscles are the triceps, and the muscle of the upper limb extensor movement is the deltoid muscle.
28
We set up a test point to test the sEMG signals of the right arm deltoid (in red circle), biceps (in green circle), triceps (in yellow circle), and brachioradialis muscle (in blue circle) (Figure 7). The volunteers were asked to keep the postures for 125 s as shown in Figure 6 and the sEMG signals were gathered in 0 s –120 s. The test was carried out in a laboratory at a constant ambient temperature of 22°C. The volunteers fully exposed the muscles that need to be tested. The skins of the muscles were completely cleaned with cotton balls dipped in 75% alcohol to degrease and remove the skin surface and reduced electrical resistance. The disposable Ag-AgCl (silver–silver chloride) surface electrodes were selected. The electrodes were fixed on the cleaned skin after it had completely dried. Each test muscle has three electrodes, two test electrodes, and one reference electrode. The center spacing of two test electrodes is 2 cm. Parallel to the long axis direction of the test muscle fiber, a reference electrode was attached within 10 cm outside the test electrode. In the test of dynamic load state (dynamic load test), volunteers held a pneumatic screwdriver (as a handheld tool) weighing 5 kg in the sagittal plane and kept moving the arms up and down at a frequency of 15 times/min. The range of the movement is shown in Figure 8. The whole process of the experiment lasted 125 s and the sEMG signals were gathered in 0 s –120 s. The setup of the instruments is the same as the tests of static load state.
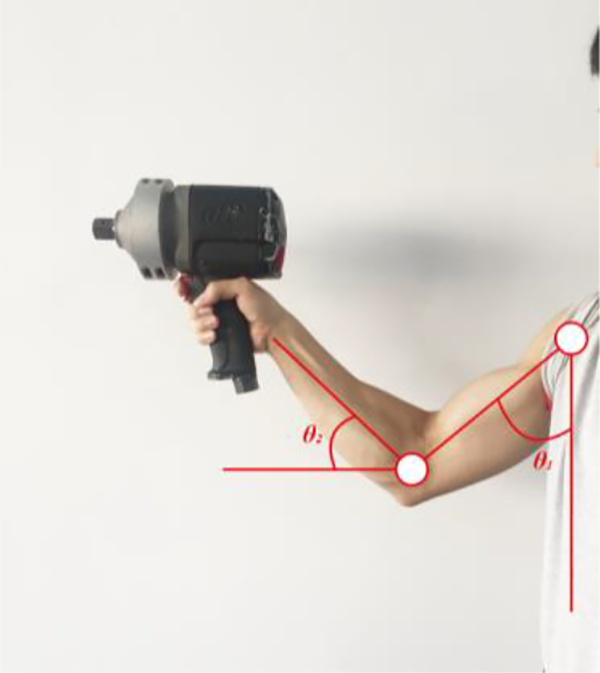
Ten volunteers who maintained a 5-kg pneumatic screw-gun at θ1 and θ2 angle.

The measured points for measuring the four muscles of the arm.

The volunteer’s right arm moves up and down between 75% and 90% of his height during dynamic load state.
Measuring instrument
The sEMG data were acquired using a FlexComp Infiniti as a professional EMG analysis system. Before each test, sEMG is checked to make sure it was in standby mode, and the instrument was operating normally. The sampling frequency was set to 2000 Hz (the analog sEMG signals were sampled at 2 kHz) and band-pass filtering of 20 Hz –500 Hz. Data were filtered again using a fourth-order Butterworth notch filter between 49.5 Hz and 50.5 Hz and were then full-wave rectified. Common mode rejection ratio of 110 dB, input impedance of 10 GΩ, gain of 1000, noise level <1 µV, sensitivity of 0.2 µV, signal A/D was converted to 12 bit.
Data processing
During the experiment, the initial EMG signals collected in real time were subjected to high-pass filtering (second-order Butterworth; cutoff frequency of 50 Hz), full-wave rectification, and low-pass filtering (second-order Butterworth; cutoff frequency of 10 Hz). In this article, the time-domain analysis method and the frequency domain analysis method are, respectively, used to process the sEMG signals.
EMG amplitude
The studies have shown that the amplitude of EMG is related to the magnitude of muscle strength. 29 The most commonly used indicator for reflecting the amplitude of myoelectric signals is the root mean square (RMS), which is the square root of the arithmetic mean of the squares of N sample points. The calculation method is as follows

Due to the large individual differences in EMG signals, we need to standardize them for comparison and analysis between different muscles and different subjects. One of the commonly used methods is to express the actually measured amplitude of EMG, the ratio of the initial quiet EMG amplitude. 30
Mean power frequency
The sEMG frequency domain analysis is to decompose the sEMG signal into signal components on different frequencies in the frequency dimension by short fast Fourier transform (FFT) to observe the variation characteristics. In this article, the frequency domain analysis is conducted by using mean power frequency (MPF). The calculation method is as follows

where f is frequency and P(f) is normalized power spectrum obtained by FFT analysis.
The test data of 120 s were equally divided into 12 groups in groups of each 10 s, and the average MPF of each set of data was used to evaluate the changes in the EMG signals. Also, the initial quiet MPF obtained prior to each experiment was normalized.
Statistical analysis
In this study, the independent variables were time and with/without PUES. The dependent variables are time-based RMS amplitude of the four muscles (delta, biceps, triceps, and diaphragm) and MPF. We collected and normalized the EMG data from each of the volunteer’s muscles and then calculated the average RMS amplitude and MPF values of each muscle. We processed the data using Statistical Product and Service Solutions (SPSS) for Windows, release 22 (SPSS, Corporation; Chicago, Illinois, USA) statistical analysis software, and then used the paired t-test to determine the significance of the test data under conditions (p < 0.05). Repeated measures analysis of variance (ANOVA) tests were performed on the RMS and MPF values that we obtained under both static load tests and dynamic load tests.
Results
The magnitude of the EMG reflects the magnitude of the muscle output force. 31,32 Hence, to compare the differences between the PUES and no-PUES conditions, we focused on the EMG amplitudes from the arms in the range of 0 s –120 s. Table 1 presents the mean and significance values of the normalized RMS of EMG amplitudes at the muscles tested in the upper limbs. In the static load tests, the average values of normalized RMS at all tested muscles (deltoid, biceps, triceps, and diaphragm) are significantly decreased (p < 0.05) from PUES condition to no-PUES condition. The decreases at biceps are the biggest, the decreases between deltoid and diaphragm are close, and the decreases at triceps are the smallest.
Summary of average normalized RMS and SDs for all muscles and conditions.

RMS: root mean square; SD: standard deviation; PUES: passive upper extremities exoskeleton suit.
* Indicates significance level of p < 0.05.
** Indicates significance level of p < 0.01.
In the experiment of dynamic load state, the decreases of average normalized RMS at biceps in PUES condition are the biggest (reaching 150.26%), and the difference is most obvious (p = 0.013). The average values of normalized RMS at deltoid have decreased from 3.05 (no-PUES condition) to 2.83 (PUES condition), in which the difference is not significantly obvious (p > 0.05). The decreases of average normalized RMS at triceps and diaphragm are close, and the difference is also not obvious (p > 0.05).
Figure 9 shows that the average normalized MPF and standard deviations for the four muscles of the arm from the data collected for 120 s (divided into 12 groups). Through a one-way ANOVA of time and PUSE/no-PUSE condition, the main effect of time was significant for all the four muscles (p < 0.001) EMG MPF. For the main effects of PUES/no-PUES condition in static load tests, the MPFs at all four muscles were significant (p < 0.005). The average MPF at the deltoid and triceps were not significant in the dynamic load tests (p > 0.05), but the rest of MPF were significant (p < 0.005) at all other muscles. Through the 120-s experiment of static load tests on non-PUES condition, the normalized MPF were decreased the most at biceps, reaching 31.6%. The normalized MPF were decreased the least (11.5%) at triceps muscle. The decreases of the normalized MPF values at all four muscles in PUES condition are much smaller than in no-PUES condition—–respectively: 7.8% (deltoid), 10.3% (biceps), 7.1% (triceps), and 12.0% (diaphragm). Through the 120-s experiment of dynamic load tests, the changes of the normalized MPF at biceps are most obvious than other muscles. The normalized MPF at biceps brachii has changed from a large drop of 40.7% (no-PUES condition) to a slight drop of 19.2% (PUES condition).

Normalized EMG MPF within 120 s (divided into 12 groups) at four muscles of the arms of 10 volunteers. (a) Measured EMG in the static load test. (b) Measured EMG in the dynamic load test. EMG: electromyography; MPF: power frequency.
Conclusion
In the industrial field, there are many workers in job sites whose role is irreplaceable. These include workers manually operating the handheld tools for flexible installation. Long-term engagement in such jobs will easily lead to WMSDs, seriously affecting the work efficiency and physical health of workers. Therefore, the use of external devices to assist workers in the process of installation has been recognized by more and more companies to be very effective. Junpei et al. 33 designed a wearable robot prototype for carpenters and found that the most fatigue part of the handheld test was biceps. Sylla et al. 20 demonstrated that Able upper limb exoskeleton is well used in the automotive industry. These exoskeletons mainly achieve their auxiliary functions through their ability to interact with humans. 34,35 In the literature, human/exoskeletal interactions are usually assessed by obtaining performance indicators (such as joint velocity, minimum angle, or final joint posture) 36 or by measuring interaction forces. 37
This article describes an ergonomic, wearable, nonpowered exoskeleton that assists workers in the installation and commissioning of handheld tools. PUES is composed of exoskeleton body and PGBA. The exoskeleton body is worn on the human body. Exoskeleton body is also used to support PGBA and handheld tools and to balance the human body about the role of torques. The PGBA is connected with exoskeleton body and operation tool, respectively, and contains multiple rotary joints. It mainly transfers the weight of tools and maintains the role of dynamic balance. It can make workers easily install and debug the operation tools.
To quantitatively evaluate the effect of PUES on workers, the designs of a sustained static load test and dynamic load test are used and elaborated in this article. It can be seen from Table 1 that in the static load test, the normalized mean RMS values at all the muscles in the arm under the PUES condition were significantly reduced (p < 0.05) compared with the no-PUES condition. This means that wearing PUES is effective to reduce the muscle load for arms in the static load test. In the dynamic load test, the normalized mean RMS values at all muscles in the arms after wearing PUES were reduced compared with those without PUES but only significant at biceps brachii and brachioradialis (p < 0.05). This indicates that in the dynamic load test, wearing PUES is effective for the volunteers, but the effectiveness is only significant on biceps brachii and brachioradialis.
There is a major phenomenon that is often noticeable when investigating fatigue using EMG: the MPF of the EMG signal tends to decrease during sustained contractions. 32,38 An observed decrease in MPF can be regarded as an objective measure of the fatiguing process. 30 Figure 9 shows that, as the time increases, the degree of fatigue state at all the four muscles increased significantly, and the increase in the dynamic load test is significantly greater than the static load test (p < 0.05). In the static load test, when PUES is in use, the fatigue at the four muscles of the arms was alleviated, and the effect was significant (p < 0.05), which verified the conclusion of the time domain analysis. Furthermore, the maximum difference in MPF between PUES and no-PUES conditions occurred at the biceps brachii muscle, which indicates that the wear of PUES was the most obvious at the biceps brachii, that is, wearing PUES helped the biceps brachii. In the dynamic load test, the MPF in biceps brachii and deltoid muscle in the figure are significantly different between PUES and no-PUES conditions; however, there is less difference in the triceps muscle. This means PUES mainly assists the human upper body in biceps brachii and deltoid, but it is less effective in the triceps muscle during the dynamic load test.
From the results above, it can be seen that PUES can reduce the stress on the deltoid, biceps brachii, triceps muscle, and brachioradialis of the human upper limbs, and the key to reducing the muscle force of upper limbs is that the exoskeleton system takes on the extra load of the tool for the human body. More specifically, most of the weight of the pneumatic wrench is transferred to the ground through the exoskeleton system, so there is no heavy load on the workers’ deltoid, brachial two, triceps, and brachioradialis muscles, and workers can focus on the manipulation tools in the installation and commissioning operations. From the above results, it can be seen that PUES can relieve the pressures on the deltoid, biceps, triceps, and brachii muscles of the human upper limbs, thereby reducing the muscle load of the upper limbs. It is because that the exoskeleton can bear the extra burden from tools for the human wearer. In other words, most of the weight of the impact wrench is transmitted to the ground through the exoskeleton. Thus, the deltoids, biceps, triceps, and radii do not bear the heavy loads, and the workers can concentrate on the installation tasks. This is similar to the conclusion raised by Kim et al. They proved that wearing a passive upper exoskeleton vest can reduce the peak and median muscle activity of the shoulder muscles by 45% and 50%, respectively, during heavy tool drilling task. 39 Rashedi’s study on the efficacy of a passive upper extremity exoskeleton The Wearable Assistive Device (WADE) proved that the benefits of WADE under heavy payloads for upper limbs are obvious. Under medium and heavy loads, the discomfort of upper arms was reduced by 54% and 57%, and shoulder discomfort was reduced by 34% and 45%; muscle requirement (nRMS) was reduced by 36 56% in medium and heavy-loaded bilateral anterior deltoid (AD), while triceps brachii (TB) was reduced by 40% on the left side under heavy payload. 40 Butler and Liu et al. have also reported that passive upper extremity exoskeleton can significantly reduce the pain/discomfort level of the upper arm and shoulder. 41,42
This article introduces an exoskeleton system that can help the human upper extremities and delivers the experimental and testing methods. But there are also corresponding deficiencies—first of all, PUES can only assist the upper limbs when the human body stands, which does not help in the walking process. Moreover, the weight of the PUES increases the burden on the human body. Second, the PUES has the disadvantages of a bulky structure, a complex structure, and heavyweight. Third, the experiment elaborated in this article mainly focuses on the PUES test and analysis of assisting the human upper limbs, which does not include the test and analysis of the total energy consumption for the human body. Furthermore, there is the possibility that using an initial quiet stance for normalizing EMG profiles may affect the accuracy of the data analysis. Therefore, there is still much room for improvement of PUES. It is still our mission to develop more practical exoskeletons. Subsequent improvements to PUES require further research and development to make the device work more efficiently.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Guangdong Province collaborative innovation and platform environment construction special fund Projects.