
Abstract
Time-varying formation control problem for a group of multiple quad-rotors has been considered in this article with the help of ellipsoid. Firstly, an elliptic equation with time-varying parameters has been firstly introduced to describe the desired formation patterns for multiple quad-rotors in three-dimensional space. Then position controller and attitude controller are constructed using the method of sliding model control, respectively. Through tuning parameters of the elliptic equation, time-varying formation control of multiple quad-rotors has been realized using the controllers proposed in this article where smoothing transition between rigid formations has been guaranteed. Simulation results for formation control of quad-rotors that perform translation, scaling, and rotating actions have illustrated effectiveness of the time-varying formation controller that proposed in this article.
Introduction
In the past decades, quad-rotors has received a lot of attention because of its simple structure and its versatile abilities in civilian or military field. 1,2 Compared with one single quad-rotors, multiple quad-rotors have much more advantages in fulfilling complex tasks, robustness to unexpected disturbances and have been used in many real applications such as surveillance and crowd control, 3 pollution control, 4 contour mapping of nuclear radiation field, 5 and localization of mobile target. 6,7
It has been well known that there are three main research line for the formation control problem of multi-agent system (MAS) 8,9 such as leader–follower approach, virtual structure method, and behavioral approach. Although the leader–follower approach is simple and easy for real application, 10 fulfillment of the cooperative task is totally determined by the leader, and accumulation of propagating errors from the leader to the follower is another issue for this framework. For the virtual structure framework, 11,12 not only information of the whole formation pattern but also information of the relative formation is required, which means the computation burden is much higher than the other two frameworks. Another weakness of the virtual structure method is that some potential applications are limited by this method. Concerning the behavioral framework, 13 some basic rules should be previously anticipated and firstly programmed, which means there are much more work to do before real application in different scenarios. It is also not easy to characterize the stability of the whole system mathematically using the behavioral framework.
Time-varying formation control of MAS means that MAS can change the formation according to different scenarios without losing its stability. 14 Due to its great potentiality in real allocations such as mapping much greater area through spreading or gathering actions or passing obstacles through formation changing, the time-varying formation problem has received a lot attention in recent years. Methods of vector field have been used in Frew and Lawrence 15 and Goncalves et al. 16 for simple integrator vehicle to track some time-varying curves. Then based on consensus protocol for MAS, distributed time-varying formation controller has been constructed for second-order MAS in Dong et al. 17 using the framework of virtual control where only information of neighboring agents are used. Along the research line of Dong et al., 17 time-varying formation for linear time-invariant MAS has also been realized in Dong et al. 18 and extended to high-order linear time-invariant system 19 or when the interaction topology is switching. 20 In the past 3 years, time-varying formation control for nonlinear system or system with uncertainties has also become one hot spot where various achievements have been made. Time-varying formation control of multiple nonholonomic mobile robots has been considered in Yu et al., 21 where distributed extended state observer (ESO) has been constructed to estimate leader’s state and control input. Distributed finite-time sliding mode estimator has also been constructed to estimate the position and velocity of virtual reference for time-varying formation control of multiple Euler–Lagrange agents in Li et al. 22 Furthermore, the finite-time sliding-mode observer and distributed ESO have also been extended to time-varying formation control of quad-rotors in González-Sierra et al. 23 and high-order nonlinear MAS in Yu et al., 24 respectively. Although a lot of work has been done on the time-varying formation control problem, the range for real application of these results is limited because most of the time-varying formation control is just a fixed formation attached to a moving coordinate.
Different to the time-varying formation control mentioned above, general time-variant formation control problems of MAS have been studied in Briñón-Arranz et al. 25 using affine transformation such as rotation, translation, and scaling. Based on the inspiration of Briñón-Arranz et al., 25 time-varying formation control of multiple quad-rotors is further considered in this article. Compared with the time-varying formation control mentioned above, main contributions of this article can be summarized as follows. Firstly, one ellipsoid equation has been introduced to describe the desired formation pattern where an additional tuning parameter has been adjusted according to different scenarios. Then with the help of introducing ellipsoid equation, some previous time-varying formations can be regarded as special case of this article where translation, rotation, and scaling can be smoothly realized. Finally, novel sliding mode surface has been constructed in dealing with the control of position subsystem and the control of attitude subsystems where synchronization error and tracking error have been mixed together.
The rest of this article is organized as follows. In the second section, mathematical model and lemmas that will be used are firstly presented. In the third section, the ellipsoid equation with time-varying tuning knob has been firstly introduced to describe the desired formation pattern, and then controllers design for position subsystem and attitude subsystem are presented, respectively. In the fourth section, the time-varying formation control method is evaluated using simulation studies. Finally, conclusions are drawn in the fifth section.
Preliminaries
The quad-rotor to be considered as shown in Figure 1 can be described by the following model which is same as those in Xu and Cao 26 and Xu and Özgüner 27 .
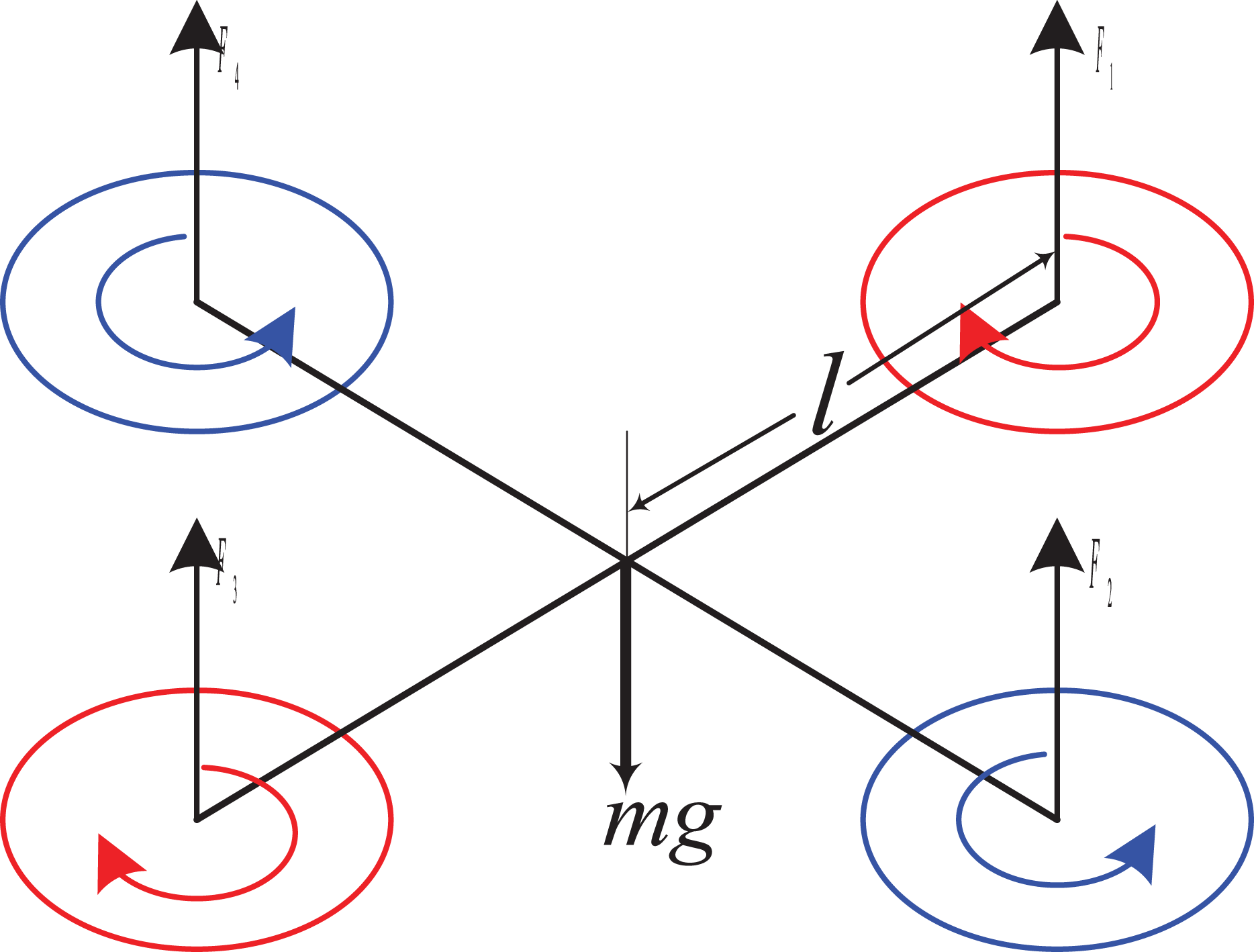
Configuration of quad-rotor.

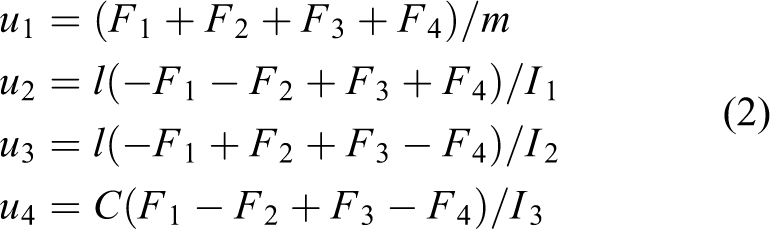
where
Lemma 1
Consider the following system 28

where
Main results
It is well known that the quad-rotor (1) can be treated as a cascaded system composed of the following position subsystem

and the following attitude subsystem

where

Remark 2
It can be observed that the attitude subsystem (5) is not affected by the position subsystem (4), while the position subsystem (4) is influenced by the attitude subsystem (5). In the following sections, controller design for position subsystem (4) is separated from that for the attitude subsystem (5).
The quad-rotor formation constraints
In the previous studies on formation control of multiple quad-rotors, the desired formation pattern has been described using some complex equations which is hard to use in real applications, especially for time-varying formation control problems.
In this article, the following ellipsoidal parametric equation with time-varying parameters is used to describe the desired formation pattern for multiple quad-rotors

where
For the easy of reading and for the simplicity of time-varying formation control, the ellipsoid equation (7) is rewritten as the following parametric equation

or in the following matrix form

where



If the position of each quad-rotor is not located in the longest or the shortest axis, then it can be easily obtained that

where

where
Control law for position subsystem
Firstly, define the position error between each quad-rotor and its desired position as follows

Then based on the results obtained in equations (13) and (14), the following relationship can be easily obtained as

Thus, based on the following synchronization error

it is to see that formation control of multiple quad-rotors can be realized if the following is satisfied

For simultaneous satisfaction of equation (18), denote

and the dynamic change of

or in the following matrix form

where
For simplicity of the position controller design, denote

With the following sliding mode surface

the time derivative of sliding mode manifolds can be derived as

After substituting

For the realization of

where
Theorem 1
Under the controller (4) and the sliding mode surface constructed in equation (22), the position subsystem (4) is globally asymptotically stable.
Proof
Considering the following Lyapunov candidate function

whose derivative with respect to time is

After substituting the control input (24), we will have

Based on Lemma 1, we have that S converging to zero in finite time. And

can also be obtained because
Control law for attitude subsystem
Similar to the controller design for position subsystem, with the notation of angle tracking error

where c 1, c 2, and c 3 are positive constant numbers to be specified. After lengthy computation, the time derivative of the above sliding mode manifolds can be expressed as

Similar to the controller design of equation (24), the following controller can also be derived as

where
Theorem 2
Under the controller proposed in equation (30), the closed-loop system composed of system (5) and (30) is globally asymptotically stable.
Proof
Because each dynamic equation of roll, pitch, and yaw has similar structure, only the behavior of pitch angle has been taken out as an example. Considering the following Lyapunov candidate function

whose derivative with respect to time can be easily obtained as

After substituting the attitude controller (30), we have

Thus based on Lemma 1, it can be obtained that
Simulation studies
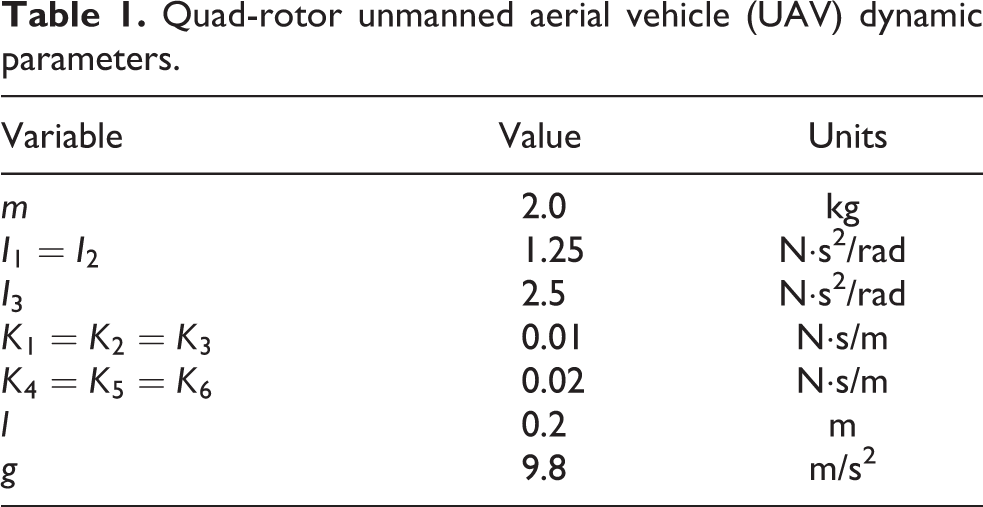
Simulation studies are conducted in this section to illustrate the effectiveness of the main results that was obtained in this article. Under the three initial conditions
Quad-rotor unmanned aerial vehicle (UAV) dynamic parameters.
Rigid formation control on ellipsoid
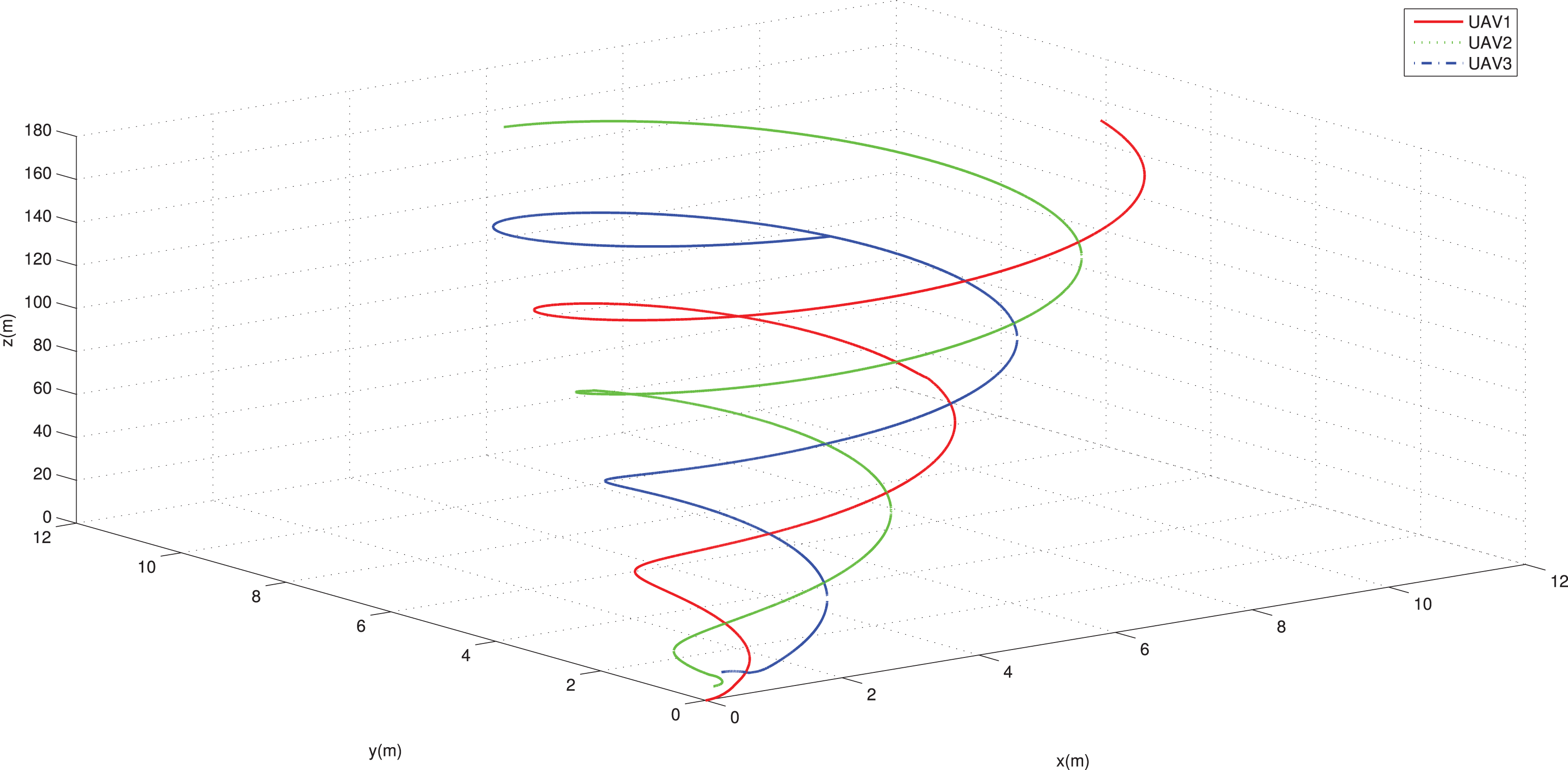
Firstly, rigid formation control of multiple quad-rotors has been considered on ellipsoid with

which means that the ellipsoid is rigid along the x-axis and the y-axis. Trajectories in three-dimensional space have been shown in Figure 2 and velocity of each quad-rotors with respect to its virtual leader has been shown in Figure 3. It is clear that the rigid formation control problem can be recovered by selecting some fixed parameters under the methods prescribed in this article.

Rigid formation control on ellipsoid.

Velocity of each quad-rotor with respect to virtual target.
Stitching between rigid formation control on ellipsoid
Besides the rigid formation control study in the previous section, switching between two rigid formation control are firstly studied in this section. Two kinds of scenarios with the following selection of parameters are selected in the following

and

The trajectory of each quad-rotor has been plotted in Figure 4 and their velocities with respect to time have been shown in Figure 5. From the simulation studies presented in Figures 4 and 5, it is obvious that there are some abrupt changes at time 29 s in the trajectory and in velocity of each quad-rotor. The reason for this phenomenon is caused by the switching between different formation patterns which can be eliminated using the methods proposed in this article.

Rigid formation control on ellipsoid.

Velocity of each quad-rotor with respect to time.
With the controllers proposed in this article, the following studies are conducted based on the following parameters in the ellipsoidal parametric equation

Trajectory of each UAV in three-dimensional space has been plotted in Figure 6, while the projection on two-dimensional space is plotted in Figure 7. The velocity of each quad-rotor with respect to virtual target and time have been plotted in Figures 8 and 9, respectively.
Formation trajectory in three-dimensional space.

The trajectory of the formation on X–Y plane.

Speed of each quad-rotor with respect to its virtual target.

Speed of each quad-rotor with respect to time.
Compared with the simulation results obtained in Figures 4 and 5, it can be seen from Figures 6 to 9 that not only smoothness of trajectory but also that of each quad-rotor’s velocity has been smoothed using the methods proposed in this article. From the trajectory on X–Y plane in Figure 7, it can be observed that time-varying formation control of quad-rotors has been realized through translating, scaling, and rotating actions.
Remark 3
Although the switching between rigid formation patterns has been smoothed using the methods of this article, the speed of each quad-rotor in Figure 9 maybe not so good as that in rigid formation control as shown in Figure 5. Because the formation pattern among quad-rotors is not fixed, it is not possible to stabilize the velocity to some constant. That is maybe the cost of time-varying formation controller proposed in this article.
Conclusions
The ellipsoid equation with time-varying parameters has been proposed in this article to describe the formation patterns of multiple quad-rotors. The time-varying formation control of the quad-rotor can be smoothly achieved through changing the time-varying parameters of the elliptic equation. With the controllers proposed in this article, transition between different formation patterns can be achieved smoothly. Simulation studies are also conducted to show the effectiveness of obtained controllers. Based on the results obtained, time-varying formation control under communication delay or general communication topology is also an interesting problem to be investigated.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by National Natural Science Foundation of China (grant nos 61973178, 61973139, Key Program: u2066203), The Key Project of Philosophy and Social Science Research in Colleges and Universities in Jiangsu Province (grant no. 2020SJZDA098), and Key University Science Research Project of Jiangsu Province (grant no. 17KJA120003).