
Abstract
This article addresses the problem that quadrotor unmanned aerial vehicle (UAV) actuator faults, including small-amplitude bias faults and gain degradation, cannot be detected in time. A hybrid observer, which combines the fast convergence from adaptive observer and the strong robustness from sliding mode observer, is proposed to detect and estimate UAV actuator faults accurately with model uncertainties and disturbances. A nonlinear quadrotor UAV model with model uncertainties and disturbances is considered and a more precise unified expression for actuator faults that do not require knowing where the upper or lower bound is provided. The original system is decomposed into two subsystems by coordinate transformation to improve detection accuracy for small amplitude bias faults and avoid external influences. The hybrid observer is then designed to estimate subsystem states and faults with good stability by selecting a Lyapunov function. A fault-tolerant controller is obtained depending on fault estimation by compensating the normal controller (proportion integral differential [PID] controller). Several numerical simulations confirmed that unknown actuator faults can be accurately detected, estimated, and compensated for even under disturbance conditions.
Introduction
With the development of autonomous control technology, various unmanned aerial vehicles (UAVs) have been extensively used in logistics transportation, agricultural plant protection, and so on. 1 –4 Quadrotor UAVs have several advantages compared with UAV types, such as flight flexibility and fewer site requirements, and have attracted considerable research attention. 5,6 However, quadrotor UAV is a nonlinear control system with multiple and significantly coupled inputs and outputs, and control system complexity increases as performance improves. 7 They inevitably encounter multiple uncertain factors, such as wind disturbances, rotor vibration, and accidental faults. Faults in any quadrotor UAV component, including actuators, sensors, and so on, can be catastrophic. Therefore, fault detection and diagnosis (FDD) has attracted widespread industrial and scientific attention 8 –11 to identify and compensate for faults so that the control system can remain stable and safe.
Fault diagnosis encompasses three main domains: fault detection, fault isolation, and fault identification. Fault diagnosis has been widely studied over recent years with many feasible methods proposed that can generally be classified into knowledge-based fault diagnosis, 12 –14 model-based fault diagnosis, 15 –18 and signal processing-based approaches. 19 –22 Various effective model-based methods have been proposed for the linear model or linearized the nonlinear model, 15,18,23,24 and many studies have proposed improved observers for FDD. For example, Han et al. 25 proposed a reduced-order fault estimation observer for a switched system to solve the problem of actuator and sensor faults. Actuator and sensor bias faults were accurately estimated under the assumption that these faults are completely unknown. Mostafa et al. 26 proposed a novel sliding mode observer to estimate the actuator bias faults for the linear system of a wind turbine. Osorio-Gordillo et al. 27 proposed a new generalized observer for general linear systems. Shen et al. 28 proposed an adaptive method to solve actuator gain and bias faults for the linearized system of a front-wheeled steered vehicle.
The above works solved the actuator fault in the linear system, but the fault types or external disturbances were not fully considered. Linearized systems are relatively simple to build and analyze, but they cannot reflect the system’s nonlinear nature. Therefore, Cen et al. 29 proposed an adaptive Thau observer to detect and estimate actuator bias faults, and Hongjun et al. 30 proposed a high-gain observer to estimate the bias faults of actuator and sensor for the nonlinear quadrotor UAV. Zhang et al. 31 proposed a switching sliding mode observer for actuator fault detection and isolation for time-invariant systems with nonlinear perturbation that considered bias and loss of effectiveness faults, where fault upper and lower bounds were known constants. In the above work, actuator fault types considered for these nonlinear systems were insufficient and actual bias fault amplitudes are significantly larger than the disturbances considered.
According to the above works, it is very important to study the actuator faults for nonlinear quadrotor UAV. In fact, fault amplitudes are commonly very small initially, and uncertain disturbances and noise are unavoidable, making it difficult to detect small or potential faults in their initial stage. Faults tend to accumulate over time and eventually seriously impact system control. Therefore, reliable fault detection can significantly help avoid unnecessary losses caused by false alarms.
Motivated by the above analyses, the coordinate transformation was adopted by the literature
32
to enhance the performance of fault estimation. The article proposes a hybrid observer that can deal with quadrotor UAV actuator faults leveraging advantages from adaptive and sliding mode observers and hence also providing better balance between speed and robustness. In addition, actuator faults and disturbances are separated by the coordinate transformation, with subsystem
Problem formulation
Dynamic model of a quadrotor unmanned aerial vehicle
As the name implies, quadrotor UAVs have four cross-shaped rotors that are noncoaxially symmetrical. Figure 1 shows a simple diagram of the quadrotor UAV, where

where Mg is the gyroscopic moment of the quadrotor UAV, Mr is the torque provided by the rotors, and Md is the aerodynamic drag. Thus, the dynamics model of the quadrotor UAV can be obtained as follows
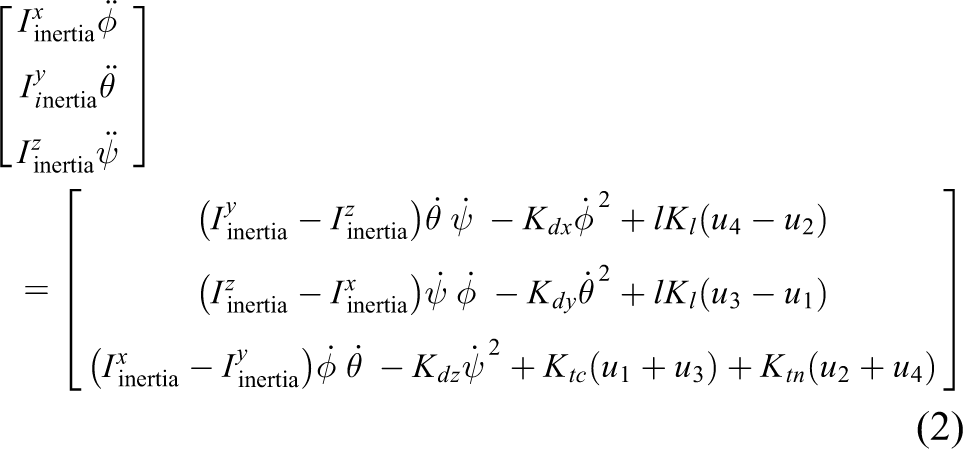
where l is the distance from the rotor to UAV center of mass,

Coordinate system of a quadrotor UAV. UAV: unmanned aerial vehicle.
Let

According to the parameters of quadrotor UAV, we can conclude that
Assumption 1. The function
Assumption 2. Without loss of generality, the uncertainty disturbance function
Theorem 1. There are matrices J
1, J
2 and a positive scalar
Proof. There exist matrices J
1 and J
2 that satisfy
Actuator fault model
The actuator of UAV is mainly composed of motors and blades. In the long-term flight, the actuator is inevitably subject to wear, aging, and external impact, resulting in abnormal motor power, blade friction change, and even propeller damage. Actuator faults generally include loss of motor speed, reduction of lift force due to blade damage, stuck motor, and so on. In addition, the wear and aging of the actuators of UAV also cause small-amplitude faults. According to the degree of fault, actuator fault can be divided into three categories: out of control, complete failure, and partial failure. Complete failure means that the output voltage of the motor is always zero or the propeller in common axis is stuck and unable to rotate. Complete failure and out-of-control states can only be solved by redundant hardware. Partial failure means that the motor is in a controllable state, but the output voltage is lost. This article mainly considers a partial failure.
If there is a partial failure of the actuator, there is a difference between the input command and the actual output of the fault actuator. The main feature is that the output voltage from the motor cannot reach the expected value, and hence, UAV attitude will be affected. The relationship between fault and actuator input signal can be divided into bias (additive) and gain (multiplicative) faults.
Let

where
Thus, from equation (3), the system with actuator bias fault and actuator gain fault can be expressed as

Nonlinear quadrotor model with actuator faults
Consider the following system with a general actuator fault

There are transfer matrices T and S that satisfy
Consider the nonsingular transformation matrix T,


where
Design of fault detection based on hybrid observer
Based on equation (7), a Thau observer is chosen for fault detection in subsystem

where
For subsystem

where the estimation of

where
The estimate errors are defined as


Let

where
Theorem 2. From Assumptions 1 and 2, the system is detectable, and there exist matrices

Then, the errors
Proof. The Lyapunov function is considered as

From Theorem 1, let

From equations (12) and (17), the time derivative of equation (16) is

In the same way, consider the following Lyapunov function for equation (13)

Then, its time derivative is

From Assumption 2 and definition of

According to equations (18) and (21), equation (22) can be obtained

Therefore, if Theorem 2 is satisfied, then
Then, the detection residual can be defined as
Fault estimation based on hybrid observer and fault-tolerant control
Fault estimation
Fault isolation is required after detection for multiple actuators and we can detect each actuator by designing a bank of observers. Depending on the relationship between residuals and threshold, we can determine which actuators have faults similar to fault detection. Details are not provided here due to length limitations. After judging the occurrence of the fault by the fault detection module in “Design of fault detection based on hybrid observer” section, the fault estimation observer is triggered to estimate the real-time value of the fault, which can be used for compensation to avoid the damage caused by the fault. Each actuator can be assessed for fault status using a bank of observers. Furthermore, the results of fault estimation can be prepared for fault-tolerant control (FTC), as shown in Figure 2.
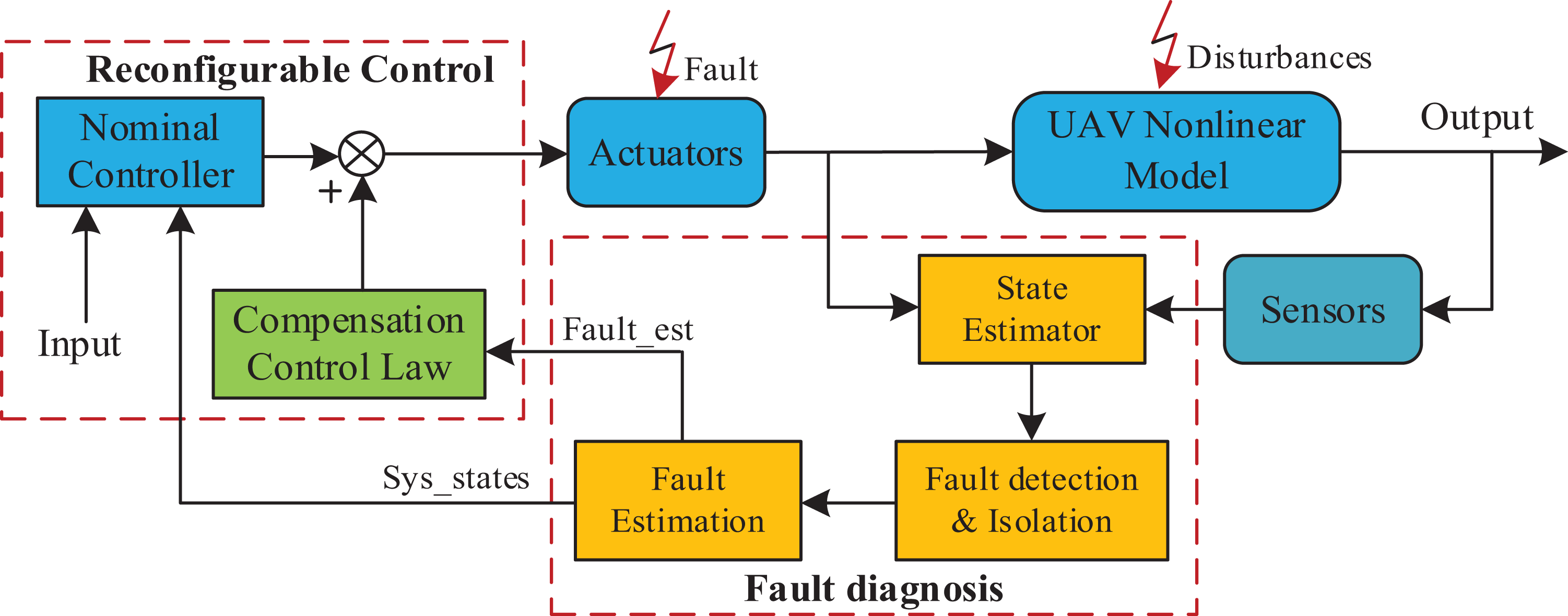
The diagram of fault diagnosis for actuators.
The design method of adaptive observer is combined with the adaptive control theory and state observer theory. Depending on state change, the system can be adjusted online by setting an appropriate gain matrix and adaptive regulation law. Assuming the s’th

where bs represents the s’th column of B 1, and us represents the s’th control input u.
Define
Theorem 3. If there exist matrices


and the error system is asymptotically stable. The following adaptive fault estimation algorithm

can realize
Equation ( 24) can be converted into an linear matrix inequality (LMI) problem using the Schur complement

where
Proof. Consider the following Lyapunov function

Then, the time derivative of equation (28) is obtained

Let

Equation (29) can be simplified as

With the help of simple mathematical derivation, we can get

and similarly,

From Assumption 2, there exist some unknown positive constants

Therefore,


where
Fault-tolerant control
After obtaining the fault magnitude, as discussed in “Fault estimation” section, it is necessary to reconstruct the original controller and design a fault-tolerant controller. This article adopted a simple and practical PID to control quadrotor UAVs under normal operation. First of all, we use the fault detection module to monitor the health of the quadrotor UAV actuators in real time. The fault detection and fault estimation module are triggered when a fault occurs to estimate bias fault and efficiency loss fault. Finally, the FTC module is triggered after fault estimation convergence to control the UAV and maintain stability.
The fault-tolerant controller based on PID controller is as follows

where
Simulation results
Parameters setting
Based on the description in “Actuator fault model” section, we know that UAV actuators mainly comprise blades and motors, with typical actuator faults including blade damage and motor speed loss. UAV actuator wear, aging, and external impact will result in abnormal motor power, characterized by that the output of the motor voltage cannot reach the expected value. Two actuator fault types are considered in this article, depending on the relationship between fault and input signals, as shown in equation (4).
Actuator mechanical fatigue and aging create small-amplitude faults. An appropriate algorithm can effectively deal with and isolate these small-amplitude faults if they can be detected in time, avoiding catastrophic results. We superimposed a small fault signal on the motor output voltage to simulate small-amplitude faults and observe whether the hybrid observer could estimate the faults in time. Motor and propeller faults have a similar influence on UAV performance, hence, we considered motor faults as illustrative examples. Actuator gain faults, such as reduced motor speed, attenuate the lift force provided, and gain faults are introduced by adding gain attenuation to the controller output. Sudden additive faults can be introduced by reducing the motor voltage duty cycle, producing constant, and time-varying bias fault.
Several simulations are performed to verify the proposed method reasonableness. The parameters of the quadrotor UAV
35
are
We assumed the following actuator faults could occur to match actual situations.
Case 1 (gain fault): The following scenario is designed to model motor gain attenuation due to reduced motor speed during flight. Partial loss of effectiveness (30%) is injected into the first motor at t = 7 s, with the other motors running normally. The actuator gain fault can be expressed as

Case 2 (bias fault): Motor output voltage cannot be accurately guaranteed relative to the reference voltage due to external disturbances causing weak jumps. We modeled this by considering a constant bias fault in the second motor, expressed as follows

Case 3 (bias fault): Long-term operation will result in mechanical fatigue in the motor, with the increasing error between motor output and expected voltage over time. Therefore, we considered a small and time-varying actuator fault in the third motor, expressed as follows

The original system matrices A, B, H, and
Fault detection
Solving Theorem 2 with
Figure 3 shows the results of fault detection for the proposed methods, where the simulation threshold is chosen as 0.03, which is reasonable since equation (7) is not subject to disturbance terms. By comparing the residual mentioned above with the threshold, we can see that the residual is less than the threshold when no fault occurs. In Figure 3(a), when the gain fault is injected in the second motor at t =7 s, we can see that the residual is greater than the set threshold at t =7.012 s in a locally enlarged figure, which indicates that the actuator effectiveness loss can be detected in time.

Results of fault detection by the proposed method: (a) Case 1: detection result of actuator efficiency factor loss; (b) case 2: detection result of constant bias fault of actuator; and (c) case 3: detection result of time-varying bias fault of actuator.
Figure 4 shows that the actual trajectory fails to track the reference trajectory since the first motor speed suddenly reduced. UAV lift forces become less than gravity, and hence, the UAV suddenly drops. At the same time, the pitch torque of the first and third motors is different, which leads to the increase of error in X direction. There will also be increasing Y direction error since counterclockwise torque from the first and third motors is no longer balanced by the second and fourth motors.
Case 1: Result of quadrotor UAV trajectory tracking. UAV: unmanned aerial vehicle.
Figure 3(b) shows that a small amplitude fault is detected at t = 6.024 s, following the first motor being injected with bias fault at t = 6 s. In Figure 3(c), for case 3, as the amplitude of the bias fault is small and changes slowly, the bias fault of the actuator is detected at t =7.402 s (the bias fault occurs at 7 s).
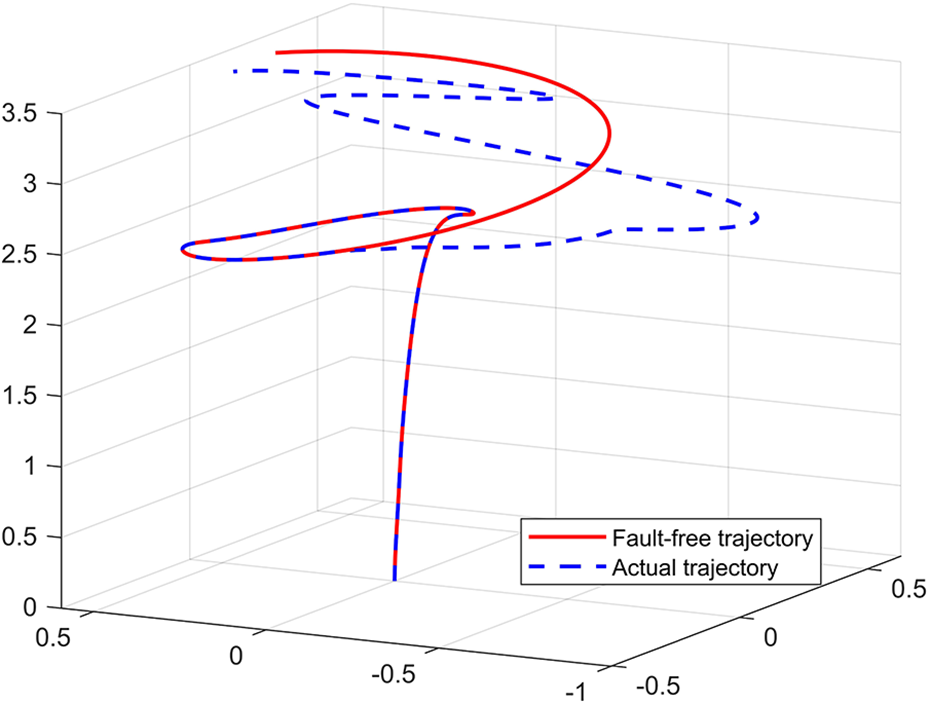
Figure 5 shows the results of the actual and reference trajectory of case 3. Since the fault occurs with small amplitude, it is difficult to determine when the small amplitude fault occurred from the trajectory tracking. However, over time, we can find that UAV cannot track the reference trajectory properly.

Case 3: Result of quadrotor UAV trajectory tracking and local enlarged results of track tracking in directions y and z: (a) Case 3: 3D trajectory tracking and (b) case 3: local enlarged results (y and z axes). UAV: unmanned aerial vehicle.
Fault estimation
To maintain the stability of UAV to a certain extent under actuator faults, fault estimation is required to compensate for the fault system. The following is the calculation of some parameters in the design process of fault estimation. By solving equation (27) with

Good fault estimation can be achieved by selecting appropriate adaptive learning rates
In Figure 6, the solid line is the actual injected actuator fault and the dotted line is the estimation of fault, we can see that the proposed method achieves fast convergence and can accurately estimate the injected fault. Figure 6(a) shows that the proposed method can estimate gain faults at approximately 8 s. Figure 6(b) shows that the method requires only approximately 0.8 s to converge to the constant bias fault. Figure 6(c) shows that the proposed method responds quickly to the time-varying bias fault and follows it well.

Result of fault estimation by the proposed method: (a) Case 1: estimation of actuator efficiency factor loss; (b) case 2: estimation of constant bias fault of the actuator; and (c) case 3: estimation of time-varying bias fault of the actuator.
Fault-tolerant control
In Figure 7, the solid line is the reference trajectory and the dotted line is the trajectory adopted FTC; it can be seen that the fluctuation of trajectory has been compensated in time after adopting FTC strategy.

Result of trajectory tracking of FTC and distance difference of y axis: (a) Case 1: trajectory tracking of FTC in case of efficiency loss; (b) case 2: trajectory tracking of FTC under constant bias; and (c) case 3: trajectory tracking of FTC under time-varying bias. FTC: fault-tolerant control.
Conclusion
This article proposed robust fault detection and estimation observers for quadrotor UAV actuator faults in the presence of model uncertainties and disturbances. Based on the actual situation, two types of actuator faults are considered, including small-amplitude bias faults and partial loss of effectiveness fault. The original system is converted into subsystems
Footnotes
Acknowledgement
The authors also would like to thank the National Natural Science Foundation of China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [Grant No. 61873182] and the Science and Technology on Space Intelligent Control Laboratory [Grant no. HTKJ2019KL502009].