
Abstract
Nowadays, unmanned aerial vehicles (UAVs) have achieved massive improvement, which brings great convenience and advantage. Meanwhile, threats posed by them may damage public security and personal safety. This article proposes an architecture of intelligent anti-UAVs low-altitude defense system. To address the key problem of discovering UAVs, research based on multisensor information fusion is carried out. Firstly, to solve the problem of probing suspicious targets, a fusion method is designed, which combines radar and photoelectric information. Subsequently, single shot multibox detector model is introduced to identify UAV from photoelectric images. Moreover, improved spatially regularized discriminative correlation filters algorithm is used to elevate real-time and stability performance of system. Finally, experimental platform is constructed to demonstrate the effectiveness of the method. Results show better performance in range, accuracy, and success rate of surveillance.
Keywords
Introduction
At present, with the development of unmanned technology, various remote-controlled unmanned aerial vehicles (UAVs) and autonomous aircrafts have become more and more widely used. They play an important role in the fields of UAV operations, aerial photography, forest fire prevention, environmental exploration, and so on. Meanwhile, the threats and security risks caused by the abuse of UAVs and illegal flying have also increased. The problem of low-altitude protection has been paid more and more attention. 1 –4
With the frequent occurrence of security problems in low altitudes, several anti-UAVs schemes have been proposed. Southeast University developed a vision for UAV surveillance based on internet of things named Dragnet. 5 Various passive surveillance devices are used to sense the environment and locally warn about the presence of amateur UAV. Besides, a cloud center performs as an orchestrator that integrates the data from various platforms. By analyzing these data, the system makes decisions on the presence of amateur UAV on them. Zhejiang University constructed an anti-UAV system, named anti-drone system at Zhejiang University (ADS-ZJU). 6 It combines three kinds of passive surveillance devices (audio, video, and radio frequency) which can localize and detect the intruding UAVs within 100 m area. Northwestern Polytechnical University designed a novel anti-UAVs surveillance system and three-dimensional (3D) localization algorithm based on fisheye camera array. 7
Various-related sensors have also been gradually developed. Firstly, radar, as the most widely used equipment for detection, is confronted with severe challenges in detecting small targets in low-altitude coverage. However, by analyzing the micro-Doppler signals obtained by radar, the ability of identifying targets can be improved. Poullin evaluated of the monostatic radar cross section (RCS) of UAV through both simulation and measurements in the 1-4 GHz frequency range. 8 This preliminary analysis laid a firm foundation for the selection of anti-UAV radar by using both conventional and passive radars. In articles, 9 –11 the feasibility and validity of several types of radar have been demonstrated through typical experimental trials.
Secondly, the technology development of jamming UAV’s operations based on wireless signal is relatively mature, while detection based on it is still in its infancy. 12 In general, the tools used to monitor drone signals include network cards, Universal Software Radio Peripheral (USRP), wireless access research platform (WARP), and so on. 13,14 Nguyen et al. used WARP to actively transmit radio frequency signals and analyze the reflected signals of UAV propeller for detection, 15 while Nguyen et al. also utilized USRP to passively receive the communication signals of UAV for detection. 16 In addition, Birnbach et al. proposed a detection method based on media access control address (MAC) 17 but it requires a database including MAC address of different UAVs.
Finally, photoelectric and acoustic devices are also widely used in the detection of drones. Wang et al. respectively proposed a target detection method based on filtering and other methods by analyzing a full-color camera or thermal infrared (IR) image. 18 –20 Chang et al. developed systematic methods to localize and track the drones by using acoustic arrays. 21
A variety of sensors have laid a foundation for low-altitude protection but many problems still exist. For example, some schemes can detect suspicious targets but cannot determine if it is a UAV. While others are able to identify UAV targets, but not quickly and accurately, and cannot provide useful information (e.g. location, altitude, and speed) for countermeasures. In this article, to correct the limitation of single sensor in detection, a multisource detection information fusion strategy and intelligent counter-manipulation low-altitude protection architecture is proposed in the “Anti-UAVs system architecture” part. Furthermore, research about information fusion of radar and photodetection is carried on to detect, distinguish, and track invading UAVs in the “UAV detection based on radar graphics information fusion” and “Improved SR-DCF UAV tracking method based on detection correction” parts. Finally, experiments are conducted in the “Experimental verification and analysis” part.
Anti-UAVs system architecture
UAVs usually fly slowly, at a low altitude with small RCS. Because it is driven by a battery-powered motor, its IR characteristics are not obvious. Moreover, the color of UAV is generally light, making it indistinguishable from the sky background. Consequently, it is indeed a challenge to probe the illegal intruding UAVs. 22 Table 1 summarizes the different detection technologies.
Technical characteristics of each UAV detection.

UAV: unmanned aerial vehicle.
As presented in Table 1, radar can acquire information about the location of unknown objects in the sky, but it cannot distinguish UAVs from other targets (e.g. bird and balloon). The audio and radio frequency detection can distinguish the UAV target but cannot obtain its accurate position information, and distance range does not meet the needs. The photoelectric device (e.g. red, green, and blue (RGB) camera and IR camera) can obtain the appearance information of the target but it cannot complete the large-scale real-time monitoring task. In practical applications, a single sensor does not perform well in recognition and discrimination. Consequently, in line with multisource detection and information fusion technology, this article proposes an intelligent anti-UAV low-altitude protection architecture. Different characteristics of various sensors are synthesized to improve the effect of discovering and detecting UAV. Its overall schematic diagram is shown in Figure 1.

Overall architecture of the low-altitude protection system.
In this system, radar and photoelectric equipment are mainly used for UAV detection, with RF as the auxiliary. The specific working process is as following steps: The Doppler radar is used to get the target position information of the radial movement. Then, suspected trajectory is selected as the target according to the characteristics of UAV movement. These tracks are numbered successively into the list of objects to be detected. According to the threat level, each target in the list will be detected and analyzed in turn. In line with positional information (e.g. distance, altitude, and level angle), system adjusts optoelectronic devices to zoom and focus automatically, so that the suspected target appears in the field of view. Through the characteristic information (e.g. speed, height, and signal strength) obtained by different sensors, the control platform will make a preliminary check. Targets suspected as UAVs are initially screened out from sensor noise and other distractions. Target detection is performed on the image acquired by the photoelectric device, referring mainly to RGB camera, through single shot multibox detector (SSD)
23
model. The category information of the target in the image is obtained. It is combined with the 3D position information obtained by the radar to accomplish the discovery and detection of UAV within the defense range. The category and location information of the target is obtained through step 4. If the target is an illegal intruder, system will alarm. The improved spatially regularized discriminative correlation filters (SR-DCF) algorithm based on detection and correction is carried on. Photoelectric device will adjust angle to make sure the target in the field of view. At the same time, system will continue to identify categories or introduce human judgments to interfere the target. If the suspicious target is not a UAV, the next target in the list will be detected.
UAV detection based on radar graphics information fusion
UAV recognition algorithm based on SSD model
UAV identification is a key procedure in this low-altitude protection architecture. The maximum flight speed of UAV is up to 12 m/s. The shortest dwell time in optoelectronic video is less than a few hundred milliseconds. To satisfy the speed requirement of the system for UAV detection, the SSD neural networks are selected as the detection model. Moreover, this model can predict end-to-end training by predicting the category confidence and offset of a series of default anchor points on feature maps of different scales, which ensures the accuracy for UAV detection.
Before training deep models, large-scale training data are required, which plays a decisive role in the generation of the final model. We collected a large number of images including UAV. There are about 879 images in various environments, weather conditions and different flight states. Part of the data set is shown in Figure 2.

Part of data set utilized to train the model for UAV detection. UAV: unmanned aerial vehicle.
While training the model, this article mainly focuses on whether the suspected target in the image is UAV. The accuracy of the category is relatively high, and the accuracy of the target position information is relatively low. Consequently, we adjusted the loss function in the SSD model, in which



where
To improve judgment of categories,

Relationship between training times and loss.
Multisource detection information fusion of radar and photoelectric device
The UAV flies low, while there are more obstructions in the low-altitude area and surroundings are complicated. Because of environmental interference and noise, radar device cannot accurately identify and track the UAV alone. Meanwhile, a single photoelectric device cannot achieve the goal for real-time monitoring, when there are UAVs illegally intruding the protected area. While working, the photoelectric device not only needs to move the angles to a suitable position to make the target appear in the field of view but also needs to zoom to capture the picture with suitable field size and then focus to make the target in the picture unambiguous.
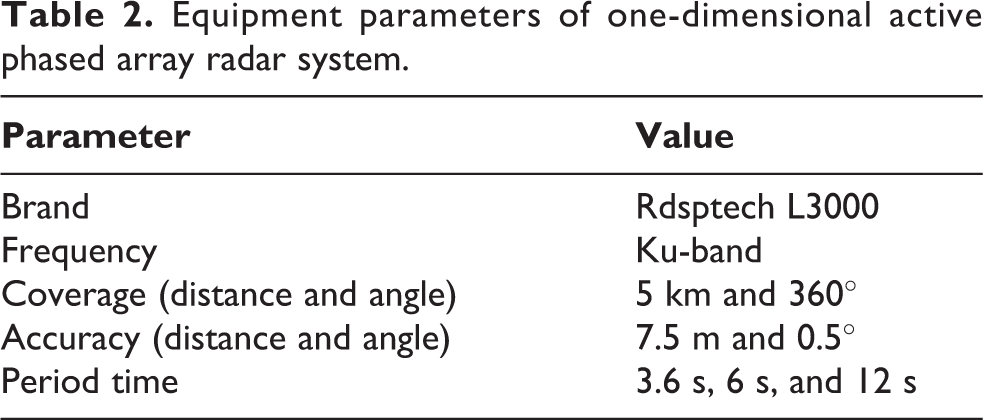
Therefore, combined with the advantages of radar and photodetection, this article proposes a multisource detection information fusion algorithm for UAVs detection. System selects the three-coordinate active phased array radar (Provided by Nanjing Rdsptech company (www.rdsptech.com)), which is particularly designed for low and slow-flying targets. The key parameters are presented in Table 2.
Equipment parameters of one-dimensional active phased array radar system.
To fuse radar and photoelectric information, spatial registration is required. System estimates and compensates for positional direction deviations with data from different sensors. The relationship between the world point coordinate and the photoelectric coordinate system of the same point P can be expressed by formula 4

Among them, the matrix R is a
Then, we make the original position of radar and photoelectric device coincide, and the 0° simultaneously point to the north direction. The schematic diagram of angle conversion is shown in Figure 4.

Process of radar photoelectric coordinate matching calibration.
The system gets started, and after multiple scans, radar filters out the clutter of the surrounding environment. Besides, according to the movement characteristics of UAV, we set the height threshold from 100 m to 600 m, and the speed threshold is between 3 m/s and 15 m/s to eliminate noise and interference of other objects. Figure 5 shows the effect of filtering clutter. The result indicates that most of the distractions can be ruled out so that photoelectric device is able to achieve the verification of suspicious targets in turn.

Radar chart after clutter filtering and conditional screening.
According to the target azimuth and altitude information provided by the radar and the set protection level area and the threat degree, the photoelectric turntable is sequentially rotated to the proper angle. Then zoom and focus in accordance with the distance information, and the screen shows the target detected by the radar. By means of SSD neural networks, control center decides whether there is a UAV in the picture. If UAV exists, the location information will be merged with the category information, and the result is output to the control center or the interference device. If not, the next suspicious target will continue to be detected. The photoelectric output in this process is shown in Figure 6.

(a) to (c) The process of obtaining a clear image containing target by fusing radar information and then adjusting the parameters (e.g. angle, focal length, and exposure) of the optoelectronic device to make it clear.
The experimental results show that through radar and photoelectric information fusion, the system can successfully probe unknown low-altitude flying objects within a certain range. It also provides specific location information and category. According to the judgment result, controller center will make corresponding decisions. Photoelectric device will continue tracking to take photos and collect evidences. On the basis of the circumstances, other jamming equipment will decide to interfere and counteract or not.
Improved SR-DCF UAV tracking method based on detection correction
In the anti-UAVs low-altitude protection architecture, how to ensure continuous tracking of the UAV target is one of the urgent problems to be solved. When suspicious target is moving fast, on one hand, according to the changes of the radial distance obtained by the fused radar information, the photoelectric device automatically adjusts focal length to keep the target in the field of image. On the other hand, the position of the object in the image is used for photoelectric device to adjust the horizontal angle and pitch angle. Consequently, the appearance characteristics of a suspicious target can be captured over a relatively long period of time, from which system can make more accurate judgments and notify the administrator.
UAV tracking based on SR-DCF algorithm
Visual tracking is an important research direction in computer vision, and it has been widely used in many aspects such as human–computer interaction and video surveillance. 24 At present, tracking algorithms are generally divided into real-time correlation filtering and deep learning. The nucleation-related filter Kernelized correlation filter 25 is relatively faster. Dual correlation filter (DCF), which is extended to multiple channels by linear kernel, becomes the main algorithm framework used in visual tracking in the current industry. The calculation formula of the desired filter f is as follows


where Sf represents the convolution response of the filter f on an M × N sample x, f is the desired filter, l is the channel, x is a sample, and y is the label.
SR-DCF tracking algorithm is a visual tracking algorithm based on DCF improvement which introduces regularization parameter ω into the original filter loss function. 26 ω represents the weight value of the information feature, which decreases in the form of Gaussian distribution as the distance from the target center increases. The resulting optimization problem is expressed as follows

In general, the relevant filter tracking method is mainly divided into the following steps. Firstly, the Pn
peripheral sample is sampled at the current position in the current frame Fn
. A regression device T that is capable of calculating the small window sample response is trained. Then, the regression calculates each sample response after sampling near the position in the next frame

UAV object location prediction. (a) Train spatial context model at nth frame and (b) detect the UAV in (n + 1)th frame. UAV: unmanned aerial vehicle.
Improved tracker based on detection correction
Although SR-DCF effectively suppresses the influence of boundary effect by adding spatial regular terms, which greatly improved the efficiency and accuracy of detection, certain issues still need to be resolved. When correlation filtering method carries out tracking, the target position of the initial frame should be given. In addition, tracking errors will also increase over time, which cannot meet the needs of low-altitude protection system for visual tracking.
In this regard, this article proposes an SR-DCF tracking method based on SSD model detection and correction. As shown in Figure 8, firstly, the images are continuously detected to determine whether there is a UAV in the view. When the UAV exists, the filter keeps tracing the target. At the same time, another thread introduces the SSD model to detect the target in the image and obtain the confidence and position information of the UAV. The system makes fusion judgment and correction based on the results. When the UAV has not been detected for many times or the effective tracking cannot be continued, the photoelectric angle is adjusted according to information from other devices. The discriminating tracking program is re-executed.

Flow chart of SR-DCF tracking algorithm based on detection correction. SR-DCF: spatially regularized discriminative correlation filters.
By introducing target detection into visual tracking, the efficiency of tracking UAV has improved, which improved the accuracy of discrimination. Meanwhile, the response time of tracking also improved. Through an intercepted video, the SSD detection model and the algorithm in this article are tested respectively. The test result is shown as in Figure 9.
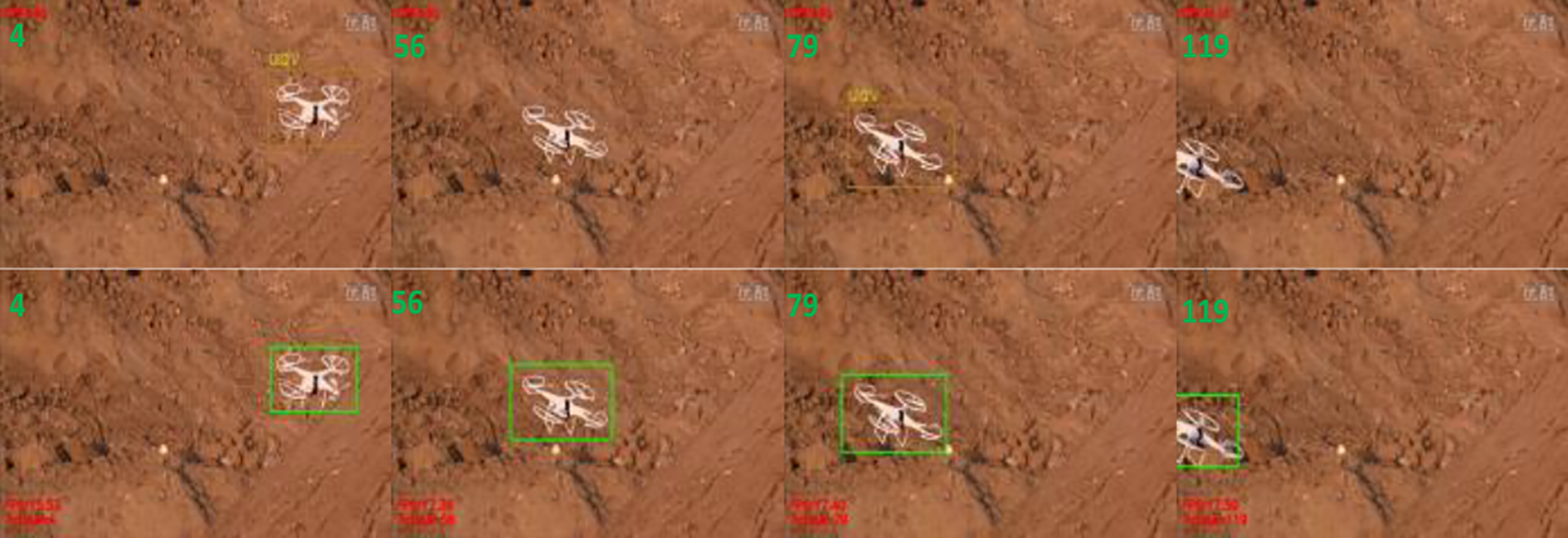
Comparison between detection and fusion algorithm.
To further analyze the effect of improved algorithm, tracking success rate and processing delay of the algorithm are analyzed, respectively, quantitatively. There are 120 frames within UAV in the test video. Figure 10(a) shows the trajectory plots diagram of two methods, respectively. The green circles represent the target points of SSD detection, with a total of 112 frames successfully detected and the success rate is 93.3%. The blue triangles represent the effect of improved algorithm. A total of 116 frames are successfully tracked, with a success rate of 97.5%. The tracking error rate fell to 2.5% from 6.7%. Figure 10(b) shows the contrast of processing delays for each frame. The average processing delay of the SSD algorithm (blue line) is 54 ms, while the improved algorithm in this article (green-dotted line) is 34 ms. The tracking efficiency is improved by 59%, which has good real-time performance.

Matching effect and processing delay of improved algorithm compared with the SSD algorithm: (a) matching effect of SSD and SR-DCF&SSD algorithm and (b) comparison of processing delay of SSD and SR-DCF&SSD algorithm. SSD: single shot multibox detector; SR-DCF: spatially regularized discriminative correlation filters.
Experimental verification and analysis
The performance of this anti-UAV system is tested on physical experiment platform in different kinds of environments. The host computer of this system is equipped with i7-8700 k 6-core 12-thread CPU, NVIDIA GTX1080(8G) Pascale architecture graphics processing unit and 16G random access memory. The maximum detection range of radar is set as 3.5 km, while the focal length of photoelectric device (RGB camera) is set to make drone target within 2 km clear. When the radar discoveries a suspicious target in a range of 3.5 km, the list to be checked will include its fist. When the target intrudes within 2 km, photoelectric device adjusts the angle and focus based on object’s direction and distance information to get photos containing the suspect object. Therefore, judging from fusion information of radar and optoelectronic equipment, UAVs can be easily identified. Figure 11 shows the construction of the entire experimental platform and test results.

Schematic diagram of experimental platform and detection result. (a) Establishment of experimental platform, (b) radar detection map for information fusion, and (c) real-time detection and tracking frame.
Figure 11(a) shows the experimental platform built by radar optoelectronics and other devices, and Figure 11(b) indicates the radar picture of suspicious targets after screening. The green dots are the targets in the to-be-detected list. The red dot indicates that the photoelectric device is tracking and discriminating. Figure 11(c) represents the image containing UAV, which illegally intrudes into the protected range after discrimination and tracking.
Furthermore, in view of some practical problems that occur in the process of low-altitude protection, corresponding solutions are also proposed: When the system is working, the surroundings and sensor noise will have a great disturbing effect especially for the radar. During system initialization, the radar will perform multiple scans. When there is no UAV in the scope of the naked eye, the recurrent, periodic, close targets in radar can be considered as interference to be eliminated. In addition, due to the remarkable characteristics of flying UAV (e.g. speed and height), system can screen out most of the undesired objects. When there are multiple UAVs invading at the same time, we make different decisions in three common situations. Firstly, UAVs are coming from different angles and distances. According to the designated key region and distance information and so on, they will be listed to be detected in turn. Secondly, UAVs are coming from different distances, but the same angle. The closer and higher threat one will be prior to be detected and tracked. Finally, UAVs are coming from the same angle and distance so that they may appear in the same frame. According to the confidence output by SSD model, the target more likely to be UAV will be tracked. When the photoelectric device is tracking, UAV may move so fast that the target is lost in the image. On the one hand, system will adjust the focal length after missing target, so that the field of vision will be enlarged to continue target detection. On the other hand, the distance and azimuth information obtained by radar will always be used for optoelectronic device to make adjustments.
First of all, to verify the accuracy of the improved algorithm to track the target, we recorded and analyzed several situations that often occur in practical applications. The algorithm in this article is compared with SR-DCF method in complicated conditions like long-term tracking, UAV crossing the boundary of the field of vision. The experimental results are shown in Figure 12. The blue curve represents the actual flight track of the UAV target. Red curve represents the trajectory obtained by tracking algorithm in this article. Gray curve represents the trajectory obtained by SR-DCF algorithm. The circle represents beginning, and the triangle represents the end.

Comparison of accuracy between the improved algorithm and SR-DCF. (a) Long-term correlation tracking, (b) tracking cross-border target, (c) tracking in complex background, and (d) tracking fast moving target. SR-DCF: spatially regularized discriminative correlation filters.
In Figure 12(a), when UAV moves irregularly for a relatively long time, SR-DCF tracking method cannot precisely track the target. Moreover, as time goes on, tracking effect becomes worse. Ultimately, it is difficult to distinguish UAV from the image. The algorithm in this article can still precisely locate the UAV in image after long-term tracking, which is robust. In Figure 12(b), when UAV moves to lower left of the image, it will shift out of camera view and reappear after a few seconds. It can be seen that SR-DCF algorithm cannot make accurate judgments when the target temporarily disappears in image, resulting in tracking failure. The algorithm in this article can accurately figure out the disappearance of UAV and quickly track it when it reappears. In Figure 12(c), the background color changes when UAV moves to the upper right of the image, which makes it tough for SR-DCF to track. However, the algorithm in this article can quickly correct the tracking failure. Through the constant intervention of the detector, continuous and precise tracking is realized. In Figure 12(d), when UAV moves to the upper right of the image, it quickly changes the direction inversely and starts moving to the left. The appearance of UAV becomes more obscure. SR-DCF fails to track and lost target, while the algorithm of this article can fairly accurately track the fast target.
During the experiment, the type of UAV is DJI MAVIC PRO. The size of UAV is 83 × 83 × 198 mm (height × width × length). Weight is 734 g. Operating frequency of weblink is 2.4–2.4835 GHz.
Furthermore, to verify the stability and real-time performance of algorithm, the system is used for real-time detection and tracking when the UAVs are continuously moving at different distances and heights. The results are presented in Table 3.
Effect of UAV detection and tracking.

UAV: unmanned aerial vehicle; FPS: frames per second; SSD: single shot multibox detector.
It can be seen from Table 3 that for long-distance intruder, the detection and tracking rate of the algorithm keeps above 80%. With the irregular movement of the UAV, the photoelectric system can also adjust the directions and angles in time to achieve accurate tracking. In terms of running speed, the algorithm of this article reduces the processing time of each frame by 21 ms on average, and frames per second is also increased by 34%, which shows better real-time performance. Therefore, the algorithm proposed in this article has an excellent effect in the field of low-altitude protection.
Conclusions
Due to the increasingly severe security problem caused by UAVs, this article proposes an anti-UAV detection and counter architecture based on multisource detection information fusion. Firstly, radar and photoelectric devices are converted into the same coordinate system by spatial registration. Then, by fusing information from multiple sources, suspicious targets in low-altitude range will be captured in images. Finally, improved detection and tracking algorithm is used to track the moving target in the view of photoelectric device and determine if it is an illegally intruding UAV. Meanwhile, control center will make corresponding measures in line with judgment.
In this article, a novel architecture is proposed for aerial surveillance and radio counter measures to unapproved UAVs. By the way, information fusion technology is applied on multiple surveillance devices to obtain valid characteristic of suspicious objects. At last, improved SR-DCF is used for discrimination and tracking. Strategy and algorithm of this article are verified by building a physical experimental platform. Results show that the detection and tracking strategy has higher accuracy and meets the real-time requirements of the system.
In subsequent research, diverse sensors such as radios will be introduced and integrated to reduce the impact of interference on radar device. In addition, for special situations such as rainy days, it is proposed to use IR thermal imaging technology to make auxiliary judgments on targets.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.