
Abstract
Natural gas leakage on offshore platforms has a great impact on safety production, and effective and reasonable leakage detection methods can prevent the harm caused by natural gas leakage. This article proposes a method based on ant colony optimization (ACO) for multirobots to collaboratively search for leaking natural gas sources on offshore platforms. First, analyze the structure and environment of the offshore platform, use Fluent software to simulate the diffusion process of natural gas leaked from the platform, and establish a diffusion model of natural gas leaked from various aspects, such as the layout of different platforms, the number of leaked gas sources, and the concentration of leaked gas sources. In terms of multirobot cooperative control, we analyzed and improved the ant colony algorithm and proposed a multirobot cooperative search strategy for gas search, gas tracking, and gas source positioning. The multirobot search process was simulated using MATLAB software, and the robot on the detection effect of multirobots was analyzed in many aspects, such as quantity, location of leak source, and a number of leak sources, which verified the feasibility and effectiveness of the multirobot control strategy based on optimized ACO. Finally, we analyze and compare the two control algorithms based on ACO and cuckoo search algorithm (CSA). The results show that the ACO-based multirobot air source positioning effect is significantly better than CSA.
Introduction
Offshore platform is an important equipment for offshore oil and gas extraction, the stability and safety of platform are very critical to ensure the normal exploitation of oil and gas. 1 When an offshore platform is working, it not only faces complex marine environment but also has certain safety risks in itself. The platform area is narrow and the layout is compact, at the same time, a large amount of hydrocarbons on the platform. When the equipment on the platform is damaged due to corrosion, aging, or improper operation of the staff, natural gas leaks at the seal point, and the characteristics of natural gas are flammable and explosive, 2 which can easily cause explosions and fires, 3 and huge casualties and property damage on the platform. 4 According to statistics, fire and explosion accidents account for more than 70% of total accidents on offshore platforms. 5 In July 1988, due to inadvertent personnel operation, the combustible gas leak of the compressor module caused an explosion on the Piper Alpha platform, killing 167 workers and causing economic losses of up to 28.7 pounds. 6 In April 2010, due to a hydrocarbon leak, the “Deepwater Horizon” platform exploded, killing 11 workers and causing a large-scale marine oil spill in the Gulf of Mexico. 7 In 2012, the pipeline ruptured due to corrosion, a natural gas leak occurred at the French company Total Oil’s “Elgin” offshore platform in the North Sea off Scotland.
The natural gas leakage on the offshore platform poses a great threat to the staff and related equipment. Therefore, the detection of natural gas leakage on the platform is very crucial to ensure the normal operation of the entire platform. At present, the common detection technology for leaking gas on the offshore platforms is mainly wireless sensor network monitoring technology. 8 The detection of leaked gas by most platforms is mainly sensor network monitoring technology. 9 By analyzing the diffusion model and environment of the leaking gas on the platform, multiple gas detection sensors are installed at appropriate positions on the platform to form a monitoring network. When the diffused gas is detected, the sensor alarms. This detection method is currently applied to offshore platforms and is constantly being optimized, 10,11 but there are certain disadvantages that make the monitoring results not very accurate: (1) Due to the complexity of the marine environment, the detection sensor may generate false alarms in high temperature and high humidity environments; (2) The detection sensor has a dead zone, and the gas diffusion process is changeable. When the number of sensors is insufficient, gas may not be detected; (3) The fixed position of the sensor makes it difficult to accurately locate the source of the diffused gas leak. Therefore, this article adopts a multirobot active odor source localization method based on multirobot collaboration to search and locate the leaked natural gas on the offshore platform. The multirobot system is formed by a number of simple robots with certain rules. Each simple robot has its own relatively independent structure but can communicate with each other. Each robot analyzes its own information and group information and then performs the next step to improve the ability of solving problems. Compared with a single robot, the multirobot has many advantages and can solve some problems that cannot be solved by a single, the detection speed is faster, the result is more accurate, and the robustness is stronger. 12 On the other hand, compared with the static sensor network monitoring method, multirobot active search has better flexibility and the use of multirobot detection also avoids the detection of personnel being injured due to potential hazards, such as toxic substances in the leaked gas, and ensures personal safety. 13
The robot source localization methods are mainly divided into biologically inspired algorithms, gradient-based algorithms, and probability-based algorithms. 14 Chris et al. 15 proposed three biologically inspired detection methods based on single machine air source localization, namely chemotaxis, biased random walk (BRW), and combined chemo-BRW strategy. Experimental verification shows that the multirobot improves the search efficiency and the robustness of the search strategy. Thomas et al. 16,17 used a partial differential equation to model the gas diffusion process, proposed a probabilistic method for identifying partial differential equations under sparseness, and used a factor graph, and a message-passing algorithm for multiple air source positioning and air source number identification of the robot are simulated, and the effectiveness of the algorithm is verified through experiments. Gabriele et al. 18,19 proposed an improved particle swarm optimization (PSO) algorithm for gas source location simulation and also introduced a biologically inspired collaborative algorithm for indoor gas source location in a windless environment, and designed three odor sensors. The robot and the central console form a group robot system. Through the cooperation and interaction between the individual robots, the proposed algorithm is simulated and experimented.
In recent years, due to the update of science and technology and the better search effect of the swarm intelligence algorithm compared to the gas search algorithm, the intelligence swarm algorithm has received a lot of attention. Qilin et al. 20,21 used PSO to establish an indoor time-varying pollutant source leakage model in two-dimensional and three-dimensional environments. Multirobot active olfactory search strategy is used to simulate the experiment, which verifies the effectiveness of the time-varying leak source localization method to locate the source of pollutants. Wenjie et al. 22 combined the improved cuckoo algorithm with a headwind search and simulated the odor source location in the indoor turbulent environment. Lorena et al. 23 developed a heuristic robot odor source location algorithm based on a genetic algorithm. The quality of results demonstrates that genetic programming is able to recreate chemotaxis behavior. Qinghao et al. 24 studied the adaptive ant colony optimization combined with upwind search (AACOUS) algorithm, which verified the effectiveness of the algorithm on simulation and real robot platforms. Fei et al. 25 and others proposed a probabilistic particle swarm algorithm, in which the estimated odor source probability is used as the fitness function of the PSO algorithm. Simulation experiments have verified the effectiveness of the method.
This article proposes a leaking gas search strategy based on ant colony optimization (ACO) and uses multiple robots to search for the source of natural gas leakage on the offshore platform. The ACO is an intelligent optimization algorithm that imitates the ant colony’s predatory behavior. 26 By improving and optimizing the ACO, a multirobot control strategy is formed to detect gas leakage sources. In this article, the second part uses Fluent software to numerically simulate the natural gas leakage and diffusion process of the offshore platform by analyzing the environment and gas diffusion conditions of the offshore platform. In the third part, we analyze the traditional ant colony algorithm and propose gas search, gas tracking, and gas source confirmation leaked natural gas search strategy. The fourth part uses MATLAB R2018b software to simulate the robot search process and analyzes the influence of different scenarios, different leak sources, and different robots on the multidetection effect. In the fifth part, we analyze and compare the multirobot search strategy based on cuckoo search algorithm (CSA) and ACO. The final conclusions and future prospect are presented in the sixth part.
Leaked natural gas diffusion model
We use computational fluid dynamics (CFD) software Fluent 16.0 to model the layout of offshore platforms and simulate the diffusion process of natural gas leakage. The main steps include establishing a geometric model, setting boundary conditions, and selecting a calculation method.
27
Establish a geometric model: When we use ICEM CFD 16.0 to model a two-dimensional ocean platform, the x direction is the east direction and the y direction is the north direction. We set the size of the platform to 20 × 20 m2, assume that the size of the leakage source is a square hole with a side length of 0.4 m, and the coordinates of the center position of the leakage source are (10,15). For comparison, the layout models of barrier-free and three different platforms with obstacles are set up, as shown in Figure 1, and the established models are meshed. Among the black area platform obstacle layout, the red position is the leakage source position. Calculation model: We import the established model into the Fluent software, assuming that the diffusion gas satisfies the ideal gas state equation, the flow calculation model is the κ-ϵ model, and the energy consumption in the diffusion process is ignored. To simulate the diffusion of natural gas leaking from offshore platforms more realistically, a mixed gas of 94% methane and 6% hydrogen sulfide is set. When analyzing the diffusion results, we mainly analyze the diffusion state of methane. Initial conditions and boundary conditions: Analyze the relevant data, set the leakage gas outlet velocity to 200 m/s, assume that the leakage rate remains unchanged, the ocean platform temperature is 300 K, and the platform area has a northwest wind direction and the wind speed is 7 m/s.
The diffusion process of natural gas leakage from offshore platforms is shown in Figure 2.

Offshore platform scene model. (a) Scene 1, (b) scene 2, (c) scene 3, and (d) scene 4.

The diffusion process of natural gas leakage. (a) Scene 1, (b) scene 2, (c) scene 3, and (d) scene 4.
Analysis algorithm
Ant colony optimization overview
The ACO is an optimization algorithm proposed by the Italian scholar Dorigo based on the social behavior of ant colonies. It has been applied in many fields to solve many optimization problems. 28,29 The biological principle of the algorithm is based on the foraging behavior of ants. Multiple ants start from different paths to find food eventually. During the movement of ants, each ant will release a substance called pheromone on its own path. As a carrier for the communication of path information between ants, the pheromone concentration on paths has a certain effect on whether the ants choose the path, the concentration on the path increases with more ants passing through it, and it also evaporates by the time. When the concentration of pheromone on the path is higher, the probability that the ant chooses the path is greater, forming a positive feedback mechanism. 30,31 In addition, the ACO has strong robustness and is easy to combine with other methods and algorithms to achieve different functions.
To adapt the ant colony algorithm to the multirobot search problem, first of all, the continuous search space of the platform is discretized, and the entire two-dimensional space is dispersed into multiple square grids, the geometric center point of each grid corresponds to the node, and the ant is based on the following probability. The formula moves from grid i to grid j

where
Therefore, according to formula (1), τj causes the robot to move according to the pheromone, and ηij causes the robot to move according to the distance. By calculating the probability of each grid moving, the ants move to the next grid based on roulette. At the same time, the serial number of the grid they walked is stored in the taboo table to prevent the ants from forming an endless cycle. When the ants finish a round of search, the taboo list is cleared in preparation for the next time. After each ant iteration, the ant must update the pheromone. The update rule is as shown in formula (2). The updated pheromone concentration includes the remaining concentration after volatilization of the previous pheromone and the pheromone left by the new ant when it passes by. ρ is the pheromone volatilization factor, ρ ∈ (0,1), and k is the number of ants passing through i and j

Search strategy
This article is based on the ant colony algorithm to realize the location detection of gas leakage sources by multiple robots. The detection process is divided into three stages: gas search, gas tracking, and gas source confirmation. Assume that the robot can only move to the surrounding grid at a time, and a certain number of robots can be accommodated in a single grid, as shown in Figure 3.
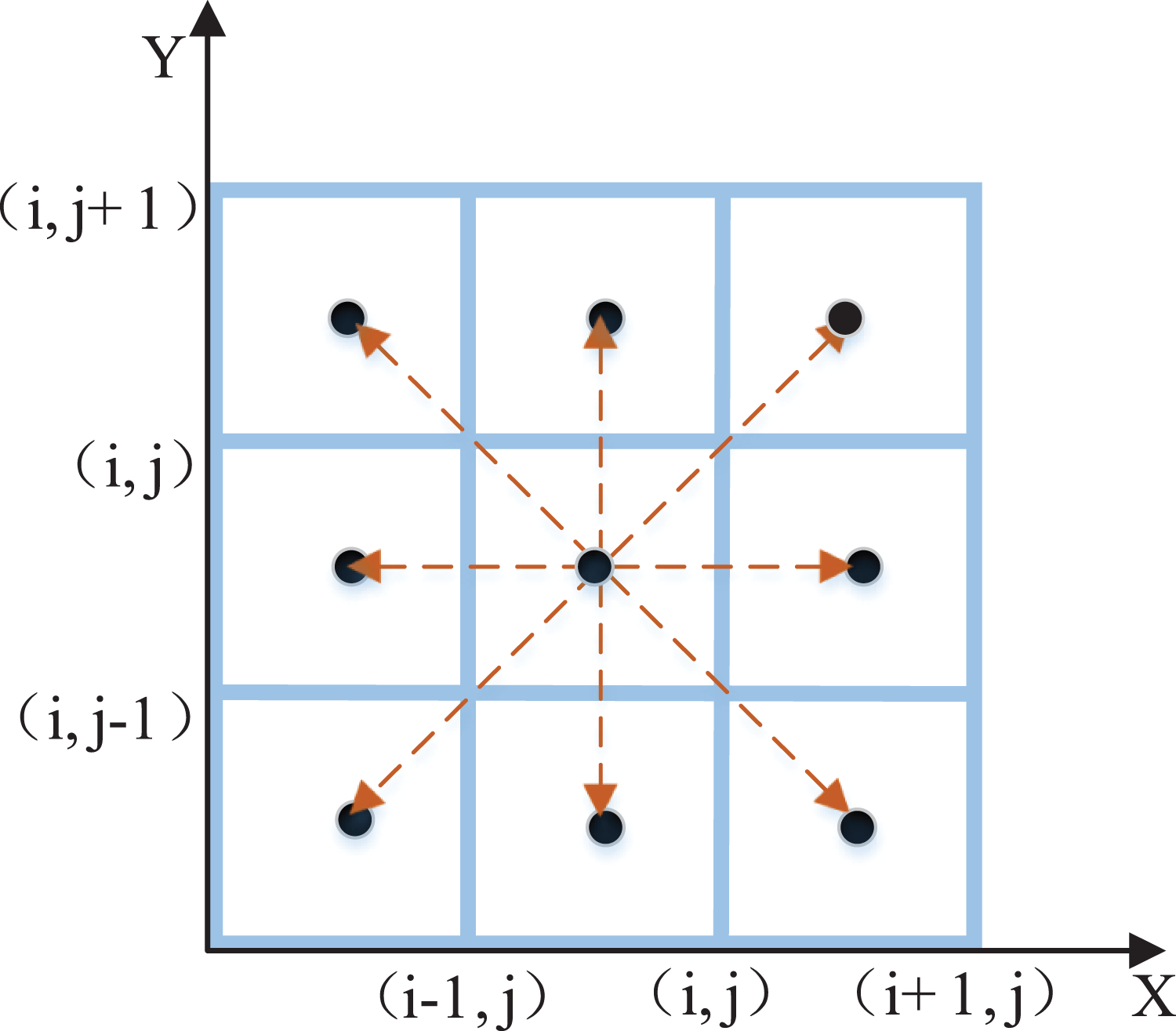
Robot moving direction.
The specific search strategy is as follows:
The robot is initialized, starting from the beginning, that is, searching for gas in the surrounding grid, if no gas is detected, the multirobot will move in a divergent manner.
When the robot starts to detect gas, the grid where the robot is currently located is specified as G present, and the robot traverses and retrieves the surrounding grids, records the maximum gas concentration grid G max, and moves to it.
To prevent the robot from falling into the local maximum value and improve the accuracy of air source detection, when the concentration value detected by a robot in an iteration is greater than the concentration detected by other robots, the robot is called the best robot r
best, and the detected concentration value is recorded as f
r. Set the threshold concentration f
thr to determine the size of the robot’s current detection concentration f
r and f
thr. When a robot first satisfies the formula (3), based on formula (4), attract other robots to approach it while moving in the direction of maximum concentration


where Pij (t) represents the probability of the i (rbest) attracts other robots j at time t. τj represents pheromone information, it represents the concentration difference between robot i and robot j. ηij represents heuristic information, it represents the distance between robot i and robot j. α and β are parameters that determine the weightiness of τj (t) and ηij (t). Finally, the robot moves to the best robot through the maximum probability robot.
During the multirobot positioning process, when the current grid concentration of r best is greater than the surrounding grid concentration, the robot stops moving, and at the same time, it waits for other robots to approach and confirm the gas source together. In the process of waiting for confirmation, if the gas concentration changes, the robot performs traversal retrieval again, and the gas source confirmation fails.
Air source confirmation mechanism: when at least two robots stop moving, and the measured concentrations are equal, the positions are the same, that is, condition 1. Then, the gas source is confirmed successfully.
When detecting multiple leak sources, mark the odor source when the first gas source is detected, and upload location information. Multirobots are searching for the next odor source in a divergent search at a certain angle.
The multirobot search process is shown in Figure 4.

The flowchart of multirobot search leak source.
Analysis of simulation results
The ant colony algorithm is used to realize the simulation process of natural gas leakage source detection on the offshore platform using the ant colony algorithm. First, set the number of robots to 3, and the robots start from their respective starting positions. Assuming that the robot moving distance per second is 0.2 m on the side of a single grid, each robot can exchange position information with each other to prevent collisions, set the parameters, as given in Table 1, and simulate the collaborative search process of multiple robots.
Search parameter initialization.

ACO: ant colony optimization.
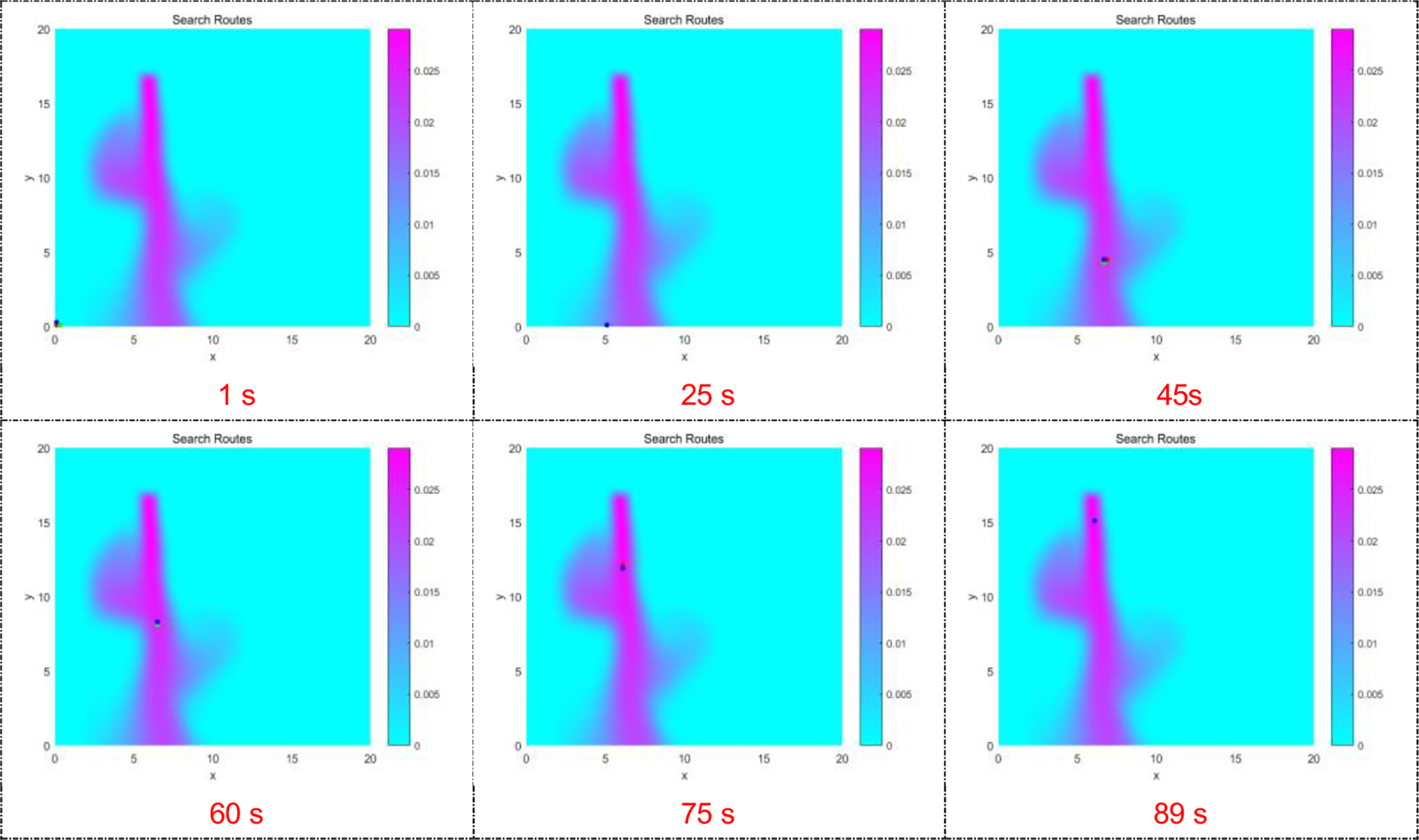
Taking three robots collaboratively searching for a single leak source in an obstacle-free environment as an example, Figure 5 shows the process of successfully locating the leak source by the robot. The three robots diverged from the starting position to search. As time increased, the robot gradually approached the location of the odor source. At the 175th second, the robot stopped moving. The multirobot search path is shown in Figure 6. We study the number of robot iterations and the change rule of concentration value. The result of the change rule is shown in Figure 7. The black curve represents the concentration detection value of the robot with the maximum concentration detected, and the blue curve represents the average concentration detected by the three robots. As the number of iterations (NI) increases, the concentration detected by the robot gradually increases. Among them, in the 0–30 iterations, the robot diverges and walks looking for gas, 30–97 iterations are the gas tracking stage, at the 97th iteration, the robot stops moving, and the detected maximum concentration is 0.028, as shown in Figure 1(a). The maximum concentration value of the diffusion simulation results is the same.

Multirobot searches process for single-source leakage in scene 1.

Multirobot searches path for single-source leakage in scene 1.

The law of concentration changes detected by the robot.
Influence of different obstacle environments on search results
Since offshore platforms are usually composed of multiple decks and the layout of each deck is usually complicated, to verify the effectiveness of the multirobot detection system based on the ant colony algorithm, Figure 8 shows the process of multirobot searching for leak sources on decks with different layouts.

The robot’s search process for a single leak source in different scenarios. (a) Scene 2, (b) scene 3, and (c) scene 4.
When the robot searches in an obstacle environment, the robot needs to consider the map information while looking for and tracking the leaked natural gas, and accurately avoid obstacles during the movement and plan the search path. From Figure 8 and Figure 9, it can be seen that the multirobot control system based on ACO can reach the vicinity of the leakage source under different obstacle scenarios.

(a–c) The robot’s search path for a single leak source in different scenarios.
To explore the impact of changes in the number of robots on the search success rate (SR/%), search time (ST/s), and NI under different scenarios of a single leak source, we set the minimum number of robots to 2. The maximum number is 7, and 100 search tests are performed on multiple robots under different numbers in different scenarios. The search SR, ST, and average value of iteration times are given in Table 2.
Search data of multiple robots with different numbers of robots in a single leak environment in each scene.

SR: success rate; ST: searching time; NI: number of iterations.
Figure 10 explores the influence of different numbers of robots on the SR of multirobot systems in detecting air sources in a single air source diffusion environment. Since a single robot cannot confirm the source of the smell, the minimum number of robots is set to 2. The multirobot system under different numbers was tested 100 times, and the SR of the robots successfully detecting the air source position remained above 90%, and it increased with the increase of the number of robots. When the number of robots is less than 5, due to the small number of robots, the diffusion gas cannot be found during the gas search phase, which causes the leak source search failure. Another reason is that when the robot is positioning, when the best robot first reaches the leak at the source location, and other robots did not reach the leak source location within the specified time, the leak source location failed. For the above reasons, when the number of robots is less than 5, the successful detection rate of the multirobot system in different scenarios fails to reach 100%. When the number of robots is greater than 5, due to the increase of robots, the search coverage area will increase. Multirobots can successfully detect the leak source within the specified time, so the multirobot system reaches 100% detection rate in different scenarios. Comparing the four curves, because the arrangement of obstacles in different platform scenarios will have a certain impact on the diffusion of leaked gas, the movement of robots, and the communication between them, the SR of detection of leak sources by multiple robots in different scenarios is different. In addition, the detection rate of multirobots in barrier-free scenes is greater than that of obstacles.

Search success rate of multirobot systems with different numbers of robots in a single-leak environment in various scenarios.
Figure 11 explores the time it takes for a multirobot system to successfully detect a gas source under a single gas source diffusion environment. The multirobot system under different numbers was tested 100 times. According to the trends that can be seen from the four curves, as the number of robots increases within a certain range, the time it takes to successfully detect the gas source decreases. Due to the limitation of the platform area, when the number of detection robots on the platform is too large to reach saturation, the flexibility of the robot will be affected to a certain extent, resulting in a small change in the time taken for the robot to successfully locate the leak source. By comparing the four curves, it can be seen that in an obstacle-free environment, the multirobot system can search for the air source faster, and the time it takes for the robot to locate the air source is also different in different obstacle environments.

Searching time of multirobot systems with different numbers of robots in a single-leak environment in various scenarios.
Table 3 presents the error with the leak source when the robot stops iterating. It can be seen from the table that the positioning accuracy of most groups can be maintained within 1 m of the leakage source. We analyze the reasons for the positioning error: the robot moves based on the concentration gradient. In a two-dimensional plane environment, under the influence of airflow, the location of the leakage source is not the point of maximum concentration, which can be seen from the Fluent simulation result, which is shown in Figure 2. At the same time, this article sets the size of the leakage source to four grid areas, the leakage source itself is an obstacle, and the robot cannot accurately locate the location of the leakage source. Therefore, in this case, the multirobot odor source search strategy based on the ant colony algorithm can only converge the global optimal solution to the vicinity of the leak source.
Positioning error.

Influence of different source locations environments on search results
To explore the impact of different leak source locations on the time it takes for multiple robots to search for leak sources, this article sets up two single leak sources at different locations to simulate in an obstacle-free environment. The locations of the two leak sources are shown in Figure 14. The process and path of searching for the leak source at position 1 are shown in Figure 5 and Figure 6, and the process and path of searching for the leak source at position 2 are shown in Figure 12 and Figure 13. By comparing Figures 6 and 13, we can see that when the leak source is closer to the initial position of the robot (Figure 13), the multirobot can find the gas and locate it faster. To further explore the influence of different leak source locations, multirobots search data in different leak source locations environment, as given in Table 4.
Multirobot searches process for single-source leakage in scene 1.

Multirobot searches path for single-source leakage in scene 1.

Location coordinates of two different leak sources.
Search data of robots at different leak source locations.

SR: success rate; ST: searching time; NI: number of iterations.
It can be seen from Table 3 and Figure 15 that the SR of robots searching for leak sources in different locations is basically the same, and the ST is different. As the number of robots increases, the time it takes for multiple robots to search for odor sources gradually decreases. Comparing the two curves in Figure 15 shows that the time it takes for the robot to search for position 1 is longer than the time it takes to search for position 2. Therefore, the location of the leak source has a certain impact on the time it takes for multiple robots to search for the source of the leak. When the location of the leak source is closer to the initial position of the robot, the time it takes for the robot to search is smaller.
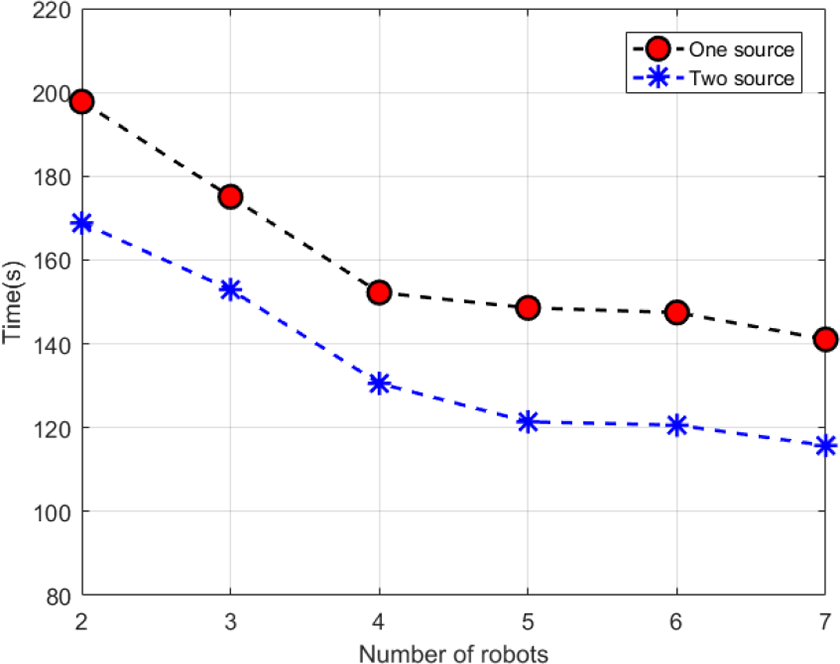
Comparison of time for robots to search for leak sources in different locations.
Influence of different number source on search results
The multirobot system is composed of three robot searches in the two leak source environments in scene 1, the search process and path are shown in Figures 16 and 17. The multirobots cooperate with each other to successfully locate the first gas source position at 77 s and the second at 144 s. By changing the number of robots, the detection effect of the multirobot system under different orders of magnitude on two gas sources is explored. As shown in Figure 18, when the number of robots is greater than or equal to 4, the detection of two leak sources by the multirobot system the SR is above 90%. As the number of robots increases within a certain range, the SR of the multirobot system successfully detecting two air sources increases. When there are only two robots, according to the search strategy, the two odor sources cannot be confirmed. Therefore, only one leakage source can be detected at most. During the detection process of multirobots, the detection of the leak source failed due to the failure of the robot to find the gas during the gas search phase or the failure of other robots to reach the optimal robot position for confirmation during the positioning phase.

Multirobot searches process for two sources.

Multirobot searches path for two sources.

Success rate of different number robots in searching for two leak sources in scene 1.
To explore the influence of the number of different leak sources on the robot search, this article sets up a single leak source and two leak source environments for search and comparison. The search data are given in Table 5. Among them, in the two leak source positions, the leak source coordinates that set close to the initial position are the same as the position2 position in “Influence of different source locations environments on search results.” section.
Search data of different robots in a single source and double source environments.

SR: success rate; ST: searching time; NI: number of iterations.
Compare the influence of the number of air sources on the successful detection of air sources by multiple robots in the same scenario, as shown in Figure 19. In the environment of two gas sources, the successful detection of two gas sources is a success. For the detection of a single leak source, at least two robots are required, and when the number of robots reaches four or more, the detection rate of a single leak source by the multirobot system is 100%. For the detection of two leak sources, at least three robots are required, and when the number of robots reaches 7, the detection rate of a single leak source by the multirobot system is 100%. According to the changing trends of the two curves, as the number of robots increases within a certain range, the probability that the robots successfully detect all air sources gradually increases. When the number of robots is less than 7, the multirobot system of the same order of magnitude compares the detection SR of the gas source is greater than that of the two gas sources. Therefore, as the number of leak sources increases, an increase in the number of robots within a certain range has a better effect on detecting leak sources.

Success rate of different number of robots in searching for one and two leak sources in scene 1.
To explore the influence of the number of gas sources on the time it takes for multiple robots to successfully detect the gas source in the same scenario, as shown in Figure 20, when the number of robots exceeds 3, the time it takes for the robot to successfully locate the leak source increases with the number of robots. By comparing the two curves, the time used to detect a single gas source in the same number of multirobot systems is less than the time used to detect two gas sources, which means that the more the number of leaked gas sources in the platform, the more time it takes for the robot to detect all gas sources more.

Searching time of different number of robots in searching for one and two leak sources in scene 1.
Comparative test and analysis
We select a robot control strategy based on the CSA 22 and test the search efficiency of different algorithms through comparative analysis. Based on the multirobot search strategy formed by CSA, in the gas discovery phase, the robot starts from the starting position to search in a divergent manner. When gas is retrieved, the robot with the largest concentration is defined as the best robot, and the best robot guides other robots toward moving in the direction of increasing concentration, the target positions of all robots are updated at the optimal robot position according to formula (5). When the optimal robot position remains stationary after multiple iterations, the iteration stops and the air source position is the optimal robot position

where Xi +1 is the position that the robot will reach in the next iteration, X best is the best robot position, Li is a vector whose step size is distributed according to a Lévy distribution, and angular direction is uniformly distributed in the direction of increasing concentration of best robot.
We use two multirobot search strategies based on different algorithms to conduct comparative experiments. First, take multirobots searching for a single leak source in an obstacle-free area as an example, set the maximum NI to 200, the search strategies based on different algorithms are run independently 100 times and the average values of the required parameters are shown in Table 6.
Data on the number of different robots based on different algorithms.

SR: success rate; ST: searching time; NI: number of iterations.
We use two metaheuristic algorithms to analyze multirobots. The search SRs of the two algorithms are shown in Figure 21. In the process of increasing the number of search robots from 3 to 7, the search SR increases as the number of robots increases. The search SR of the ACO algorithm is basically maintained at about 100%, while the search SR of the CSA is lower than that of the ACO algorithm. When the number of robots is smaller, the search SR of ACO algorithm and CSA differs greatly. As it increases, the gap between the search SRs of the two algorithms gradually decreases.

Multirobot air source search success rate based on different algorithms.
We conducted 100 search experiments on multirobots of different orders of magnitude and averaged the time taken by the robots to successfully locate the gas source under each algorithm. The results are shown in Figure 22. It can be seen from the figure that the time for both algorithms to successfully locate the gas source gradually decreases with the increase in the number of robots. Comparing the two algorithms, it can be seen that the ST used by the ACO algorithm is less than the time used based on the CSA. Based on the analysis of Figures 21 and 22, whether it is from the search SR or from the successful ST, the ACO algorithm positioning effect is significantly better than the CSA.
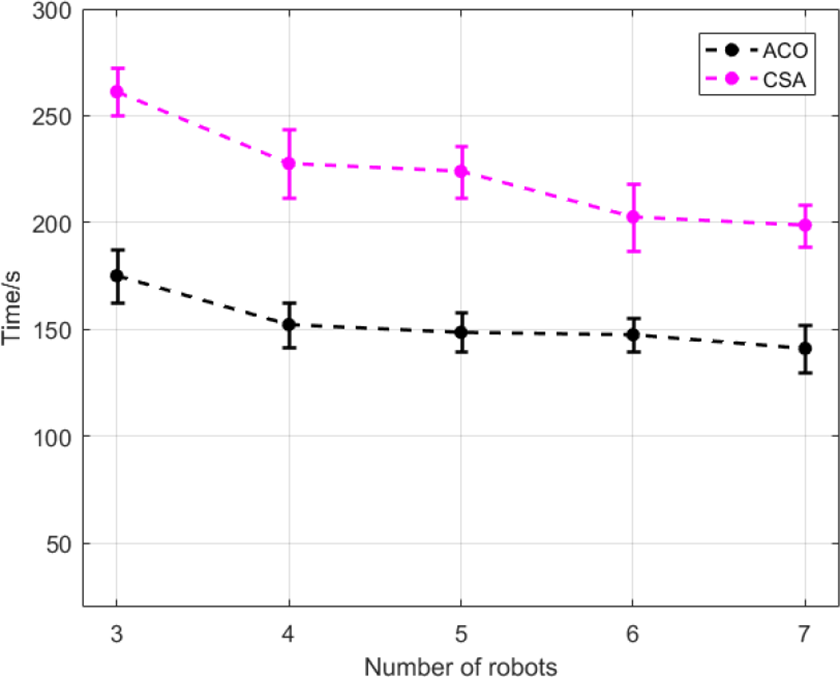
Multirobot air source search time based on different algorithms.
Conclusion and prospects
In this article, different from the traditional method of using multisensor networks to monitor natural gas leaks on offshore platforms, we propose a multirobot collaborative search for natural gas leaks on offshore platforms. This method is based on the ant colony algorithm to achieve cooperative control of multiple robots. We use CFD software Fluent combined with different platform layouts to simulate the leakage of natural gas diffusion process, a gas tracking, and gas source location strategy based on the improved ant colony algorithm is proposed, and the effectiveness of the algorithm is verified through the following aspects. When multirobot search for the source of leakage, due to the effect of air flow, gas diffusion rules, obstacles in the location of the gas source, and so on, they cannot accurately locate the gas source position and can only converge the global optimal solution to the vicinity of the leak source. When multirobot finds the leak source based on ACO, an increase in the number of robots within a certain range can improve the SR of leak source location and detection efficiency. When multirobot search in the environment of different leak source locations and when the leak source location is closer to the initial position of the robot, the robot takes less time to locate the air source location. When the robot searches in a single leak source environment and two leak source environments, it takes longer for multirobot to successfully locate all gas sources in the double source environments than in a single gas source environment. The layout of obstacles on offshore platforms has a certain influence on multirobot leak search. Different obstacle layouts may increase the time it takes for the robot to locate the leak source and may also reduce the time it takes for the robot to locate the leak source. By comparing the multirobot leak source search strategy based on two heuristic algorithms of ACO and CSA in terms of search SR, search, NI, and ST, the results show that the CAO-based positioning effect proposed in this article is obvious thanks to CSA.
This article analyzes the search strategy of multirobots based on ant colony algorithm for collaborative search of natural gas leakage sources from various aspects and verifies the effectiveness of this method in different environments. In the next step, we will establish a more accurate three-dimensional gas leakage diffusion distribution model through more specific analysis of the offshore platform environment, while continuing to optimize and improve the algorithm, analyze the robot’s movement mode, and enhance the effectiveness and feasibility of the control algorithm. Another future work is to use multiple heuristic algorithms, probability models, and other control algorithms to achieve multirobot control to complete the detection of leaking natural gas on offshore platforms.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Science Foundation of China University of Petroleum, Beijing [Nos. 2462020YXZZ046, 2462020XKJS01 and 2462018BJC004].