
Abstract
In this article, a robust adaptive tracking controller is developed for robot manipulators with uncertain dynamics using radial basis function neural network. The design of tracking control systems for robot manipulators is a highly challenging task due to external disturbance and the uncertainties in their dynamics. The improved radial basis function neural network is chosen to approximate the uncertain dynamics of robot manipulators and learn the upper bound of the uncertainty. The adaptive law based on the Lyapunov stability theory is used to solve the uniform final bounded problem of the radial basis function neural network weights, which guarantees the stability and the consistent bounded tracking error of the closed-loop system. Finally, the simulation results are provided to demonstrate the practicability and effectiveness of the proposed method.
Introduction
With the development of robot technologies, the tracking control of robot manipulators becomes the focus of research during recent years. The characteristic of robot manipulators is that the dynamics function are typical multivariable and nonlinear, and the system dynamics function are usually affected by many uncertain factors, such as external disturbances, friction term, unmodeled dynamics, and load fluctuation. Therefore, the accurate dynamics model equations of robot manipulators are difficult to build in practical applications. Accordingly, precise tracking control performances become difficult to implement. To overcome the tracking control problem of robot manipulators, various control strategies have been applied, as shown in the literature. 1 –10
The adaptive control method has been widely used because it can continuously modify its control behavior according to the complex characteristics of the controlled object, environmental interference, and modeling errors. Thereby, it is easy to achieve the satisfied control performances by using adaptive control approach. In the study of Peng and Liu, 11 a stabilization tracking controller with hybrid scheme which combines an adaptive compensator with computed torque controller is proposed for robot manipulators with external disturbances and dynamic uncertainties. In the study of Mustafa et al., 12 an adaptive back-stepping sliding mode control method was used to reduce the influence of dynamic uncertainties and external disturbances for trajectory tracking of manipulators. In the study of Wang, 13 two different adaptive control strategies were proposed to realize the satisfied trajectory tracking performance under the uncertain dynamics and kinematics functions. Similar research can be referred to the literature. 14 –17 However, there still exist many problems in practical applications when using adaptive control method, such as it is difficult to determine the initial value and estimate range of parameter estimation. In addition, it is necessary to linearize the dynamics equations in the controller design process, and a large number of calculations are needed to determine the regression matrix. Thus the application is restricted by the huge computational complexity in practice.
Radial basis function (RBF) neural network (NN) was firstly proposed by Broomhead and Lowe, 18 and due to the strong nonlinear approximation capability and fast convergence rate, RBFNN-based adaptive tracking control for robotic manipulators has received considerable attention. In the study of Sun et al., 19 an NN-based adaptive controller with a linear observer was proposed for the trajectory tracking of robotic manipulators with unknown dynamics, and only joint angle position information was used in the controller design. In the study of Ge et al., 20 the RBF network-based adaptive controller was proposed to estimate coefficient matrixes for the dynamics function of robot manipulators in task space. In the study of Zhang et al., 21 a neural variable structure control method with redundancy capability was proposed to guarantee the stability of the systems with suddenly changing parameters. In the study of Ngo et al., 22 a robust control scheme based on NN is proposed. The NN was used to compensate the parameters of disturbance and friction, such that higher control accuracy can be achieved.
In the previous NN-based adaptive control strategy, there are few research studies on the estimation of uncertain dynamics of the system by adaptive controller, therefore, the NN-based adaptive controller has to be retrained redundantly to improve reliability. However, this causes a great deal of computational burden, and it is not applicable for the real-time control systems. Inspired by this, an improved RBFNN was constructed firstly by modifying the clustering radius with variable step to learn the uncertain dynamics of the system online, then robust controller is designed to compensate for the uncertainty, and the stability and tracking performance are guaranteed.
This article is organized as follows. The second section introduces the tracking problem under the uncertainty dynamic of robot manipulators. The structure of improved RBFNN is described in the third section. The fourth section presents the adaptive NN controller. The fifth section provides simulation results of two-link manipulator. Finally, the sixth section concludes the article with a brief summary.
Problem statement
The dynamics function of an n-link rigid robot manipulator can be expressed in the following Lagrange form

where q denotes the joint variable vector and
Given a desired trajectory qd
, the tracking error

where
Substituting the control law (2) to system (1) yields

However, it is difficult to get accurate

For the nominal model (4), the control law can be designed as

Substituting the control law (5) to system (1) yields

Denote

It can be seen from equations (3) and (7) that the inaccurate modeling will cause a decrease in control performance, therefore, it is necessary to estimate the inaccurate part of the modeling.
Let

Then the error state equation under the control law (5) is

where

Considering that the uncertain dynamics term f is known, the modified control law can be designed as

By substituting equation (10) into equation (1), a stable closed-loop system (3) can be obtained.
As stated previously, the tracking control problem in this article can be summarized as follows: Given dynamics function (1) and the desired trajectory qd
, design control law (10) to guarantee the tracking error
Improved RBFNNs
A basic RBFNN structure can be determined after off-line learning, such as subtractive clustering method proposed by Chiu.
23
In this section, in order to realize online identification of the network and obtain good network identification performance for nonlinear real-time systems, an improved algorithm is presented by using nearest neighbor clustering algorithm during online learning, and the clustering radius is modified with variable step. The algorithm of RBFNNs online learning is as follows.

Then, take the minimum cluster radius

If


If



where Xi
and yi
are input signals and output signals, respectively. If
In order to verify the effectiveness of the improved RBFNN, a curve fitting example is used to compare with the basic RBFNN. The blue circles in Figure 1 represent the data to be fitted. It can be seen that the improved algorithm and the traditional algorithm can meet the same requirements in fitting accuracy, but the improved algorithm only needs 0.654 s to complete fitting, while the traditional algorithm takes 3.681 s to complete the calculation which is shown in Figure 2.
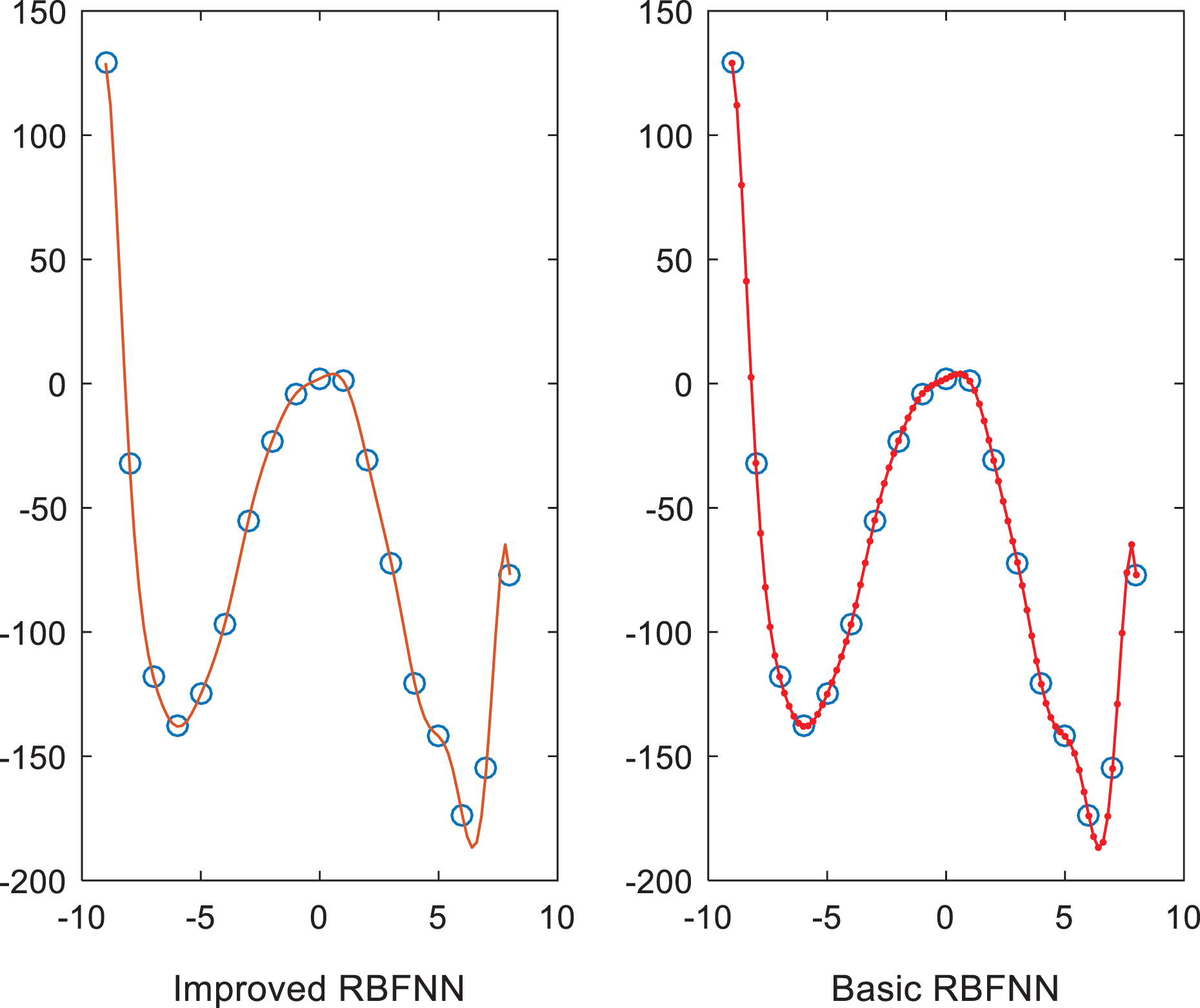
Comparison of the improved RBFNN and the basic RBFNN. RBFNN: Radial basis function neural network.

Calculation time of the improved RBFNN and the basic RBFNN. RBFNN: Radial basis function neural network.
Remark 1
In the conventional nearest neighbor clustering algorithm, if the error performance index is not satisfied, the clustering radius r is decreasing with a fixed step h. When the identification error is large but the step is very small, the learning speed of the NN will be slower. In order to solve this problem, we can adjust the cluster radius by variable step according to the error, when the error is large, increasing the step size to speed up the learning speed, when the error is close to the performance index, take a small step, to avoid overlearning.
Based on the above algorithm, an improved RBFNN can be constructed to provide the estimate of the robot uncertain dynamics function (8).
NN-based adaptive tracking controller design
In this section, an NN-based adaptive trajectory tracking control algorithm is proposed for a rigid robot with uncertain dynamics. The computational torque method is used to control the nominal model, and robust control is used to compensate for the uncertainty. The RBFNN is used to learn and approximate the upper bound of the uncertainty of the robust controller.
For system (1), using the RBFNN, the controller can be designed as follows

where
Substituting the control law (15) to system (1) yields

Utilizing

that is

Let

Considering that

where

Denote the Lyapunov function as

where

where
By deriving the Lyapunov function
Due to

The adaptive law in this article is designed as follows

where
Substituting the adaptive law (24) to (23) yields

In order to ensure

which means the convergence conditions are

As stated previously, the following theorem which gives the solution to the tracking control problem in the second section can be easy to get.
Theorem 1
Consider the dynamics function of an n-link rigid robot manipulator (1), choose the control law (15) and the RBFNN adaptive law (24), then the tracking error and the convergence of the closed-loop system parameters can be achieved.
Simulation results
The two-link robot manipulator model shown in Figure 3 is considered in this section to illustrate the efficiency of the controller designed previously.

Two-link robot manipulator.
The dynamic equation is described as (1), in which the inertia matrix, the Coriolis matrix, and the gravity vector are

where the parameters of two-link robot manipulator are given as
The external disturbance is expressed as
Simulation results of position tracking, control input of joint 1 and joint 2, and the estimations of the uncertain dynamics are shown in Figures 4 to 9. From these results, we can find that the proposed control scheme is effective.

Position tracking responses of joint 1.

Position tracking responses of joint 2.
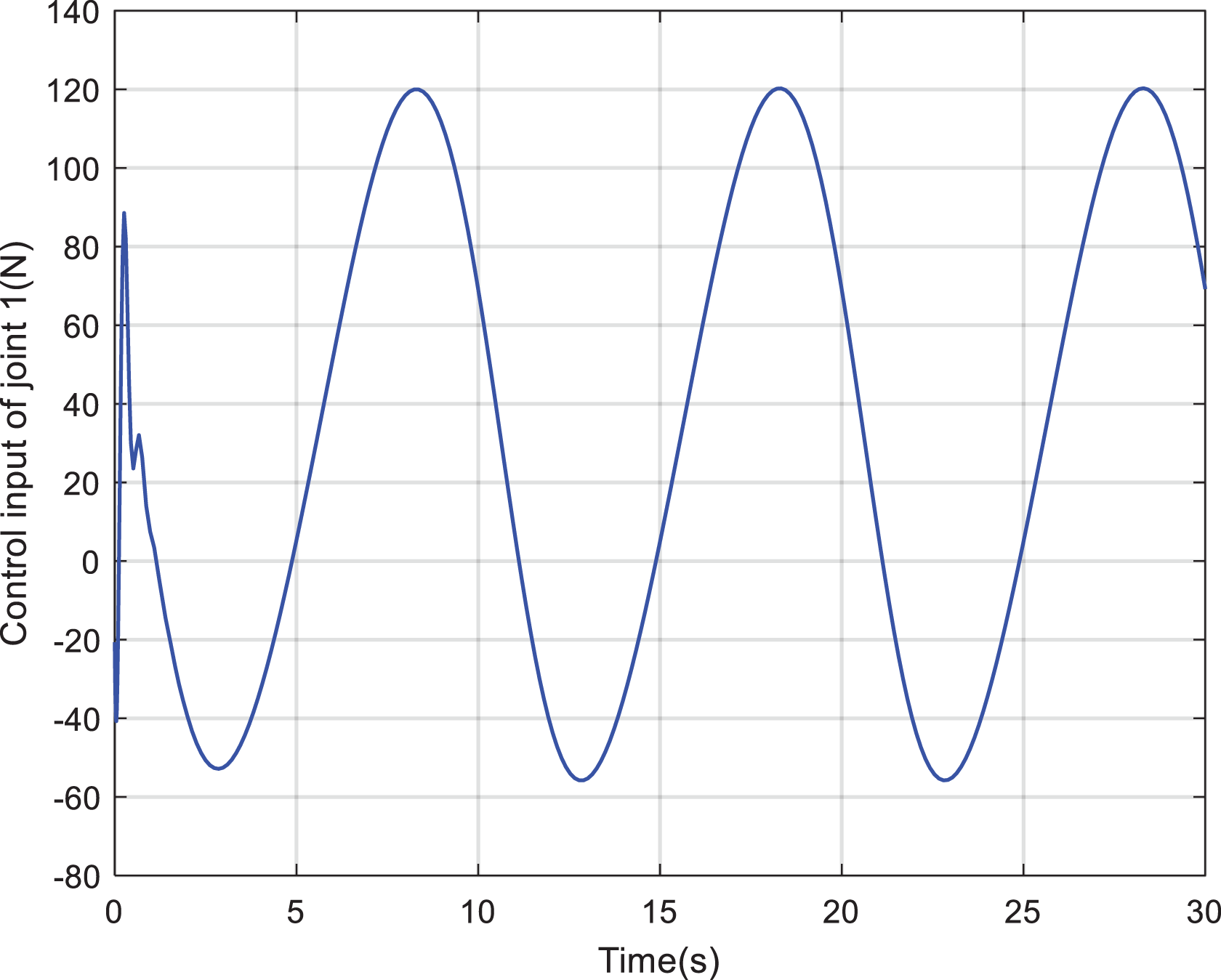
Control input responses of joint 1.
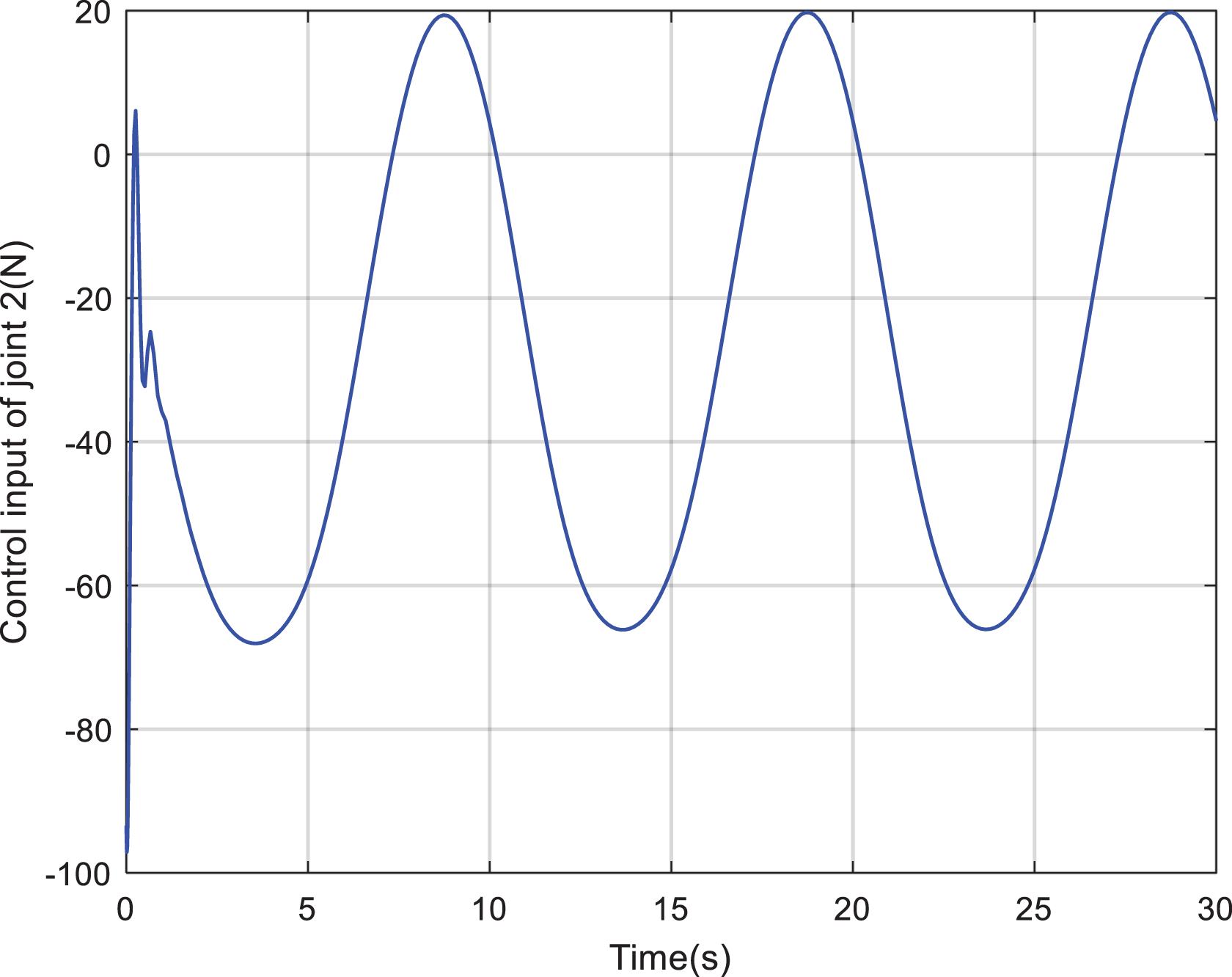
Control input responses of joint 2.

The uncertain dynamics estimations of joint 1.

The uncertain dynamics estimations of joint 2.
In Figures 10 and 11, the simulation results based on proportional-derivative (PD) control are given. It can be seen from these figures that the traditional PD control cannot accurately track the desired trajectory in the case of modeling uncertainty and external interference. The controller designed in this article can solve this problem well.

Position tracking responses of joint 1.

Position tracking responses of joint 2.
Conclusions
In this article, an improved RBFNN adaptive control method was proposed to eliminate the effects of uncertain dynamics. An improved RBFNN was constructed firstly by modifying the clustering radius with variable step to learn the uncertain dynamics of the system online. Then robust controller is designed to compensate for the uncertainty, and the degree of uncertainty and external disturbance of the system are not required to be estimated beforehand. The proposed adaptive control law guarantees the boundedness of weights and solves the bounded upper bound problem of the weights of NNs. Finally, simulation results show that the proposed method works well in the joint tracking control of two-link robot manipulator.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.