
Abstract
Aiming at a long-term formation-keeping problem for the satellite swarm, the concept of a loosely displaced formation is proposed in this article. On this basis, a continuous low-thrust control strategy for maintaining the loosely displaced formation is designed. The control objective is to reduce more fuel consumption during the formation-keeping. For achieving that, we proposed a forward-feedback control strategy by using pseudo-spectral method and sliding mode theory. To be specific, the control strategy includes two parts: a forward control and a feedback control. For the forward control, a numerical optimization with the Legendre pseudo-spectral method is attempted to convert the optimal control problem into a nonlinear programming problem and fuel consumption is selected as the optimization index. For stability issue, the feedback control via adaptive finite-time sliding mode theory is introduced as an additional control component. Finally, the numerical results demonstrate that propellant mass is effectively saved as well as the formation can be tracked accurately with this control strategy proposed in this article.
Keywords
Introduction
Satellite swarm, as an emerging concept of distributed space system, is composed of several or more physically independent, “free-flying” satellites that collaborate on orbit. As compared to a monolithic satellite, the swarm can collectively achieve a certain level of system-wide functionality. 1 –3 Formation-keeping is one of the most key technologies for the satellite swarm, which requires that the satellites could adjust their relative motion to shape a desired configuration and maintain it steadily.
For keeping the formation, a relative motion equation is required for describing the relative motion between satellites. 4 So far, varieties of relative motion equations were built by the researchers and the linearized C-W equation 5 is the most commonly used form. By utilizing the analytical solution of the C-W equation, Schaub et al., 6 Lane and Axelrad, 7 and Inalhan et al. 8 designed quantities of particular formation configuration, such as the in-plane formation, the in-track formation, the circular formation, and the projected circular formation. On this basis, Schaub and Alfriend, 9 Schweighart, 10 and Li et al. 11 took the effect of J 2 perturbation into account and designed the formations under J 2 perturbation. However, in reality, C-W equation is merely suitable for close formations as well as there exist varieties of uncertain perturbations in space, hence, the formation configuration designed in previous studies 6 –11 cannot be maintained enduringly without providing external thrust.
With the wide application of the continuous low-thrust propulsion system, a variety of control methods for the satellite formation flying have been proposed by using the modern control theory, such as the adaptive control, 12,13 the model predictive control, 14 the sliding model techniques-based nonlinear tracking control, 15,16 and the robust control. 17 In addition, some theoretical methods in other areas are also helpful to this control problem. 18 –22
The fuel consumption is a major concern for the formation-keeping mission, especially for a long-term one. All the methods 12 –17 mentioned above didn’t take the fuel consumption of the satellite into account. For saving the fuel consumption, a linear quadratic regulator (LQR) was used in the studies of Xu and Hu, 23 Palacios et al., 24 and Ke et al., 25 however, LQR merely applies to the linear system and its convergence rate is slow. Wu et al. 26 proposed a formation-keeping control scheme via real-time optimal control and iterative learning control, in which the optimal control via pseudo-spectral method aims to minimize the fuel consumption and the iterative learning control is used to improve formation-keeping accuracy, however, they 26 didn’t consider the uncertain perturbations. In addition, all the studies 23 –26 were oriented toward the precisely displaced formation. In fact, for some space missions, keeping the formation precisely may be unnecessary and a loosely displaced formation can be tolerated. Compared to the precisely displaced formation, the loosely displaced formation does not require the satellites to maintain their positions accurately, which means it can reduce the propellant consumption by loosening the displacement constraint of the satellites. Based on the above, this article aims to find a loosely displaced formation oriented to the optimal fuel consumption, which is obviously an optimal control problem. By using the optimal control theory, it is difficult to obtain the optimal analytical solution. The pseudo-spectral method, as a classical direct numerical optimization method, can transform the continuous optimal control problem into a finite-dimensional nonlinear programming problem. It was proved that the pseudo-spectral method has good convergence and low initial sensitivity, thus, it is widely used for solving the optimal control problem. 26 –29 However, while solving the optimal solution by using the pseudo-spectral method, some unknown perturbations and unmolded characteristics can’t be dealt with, which will affect the formation-keeping accuracy. In addition, the pseudo-spectral method is a numerical optimization method and the optimal solution obtained is discrete, thus, a systematic residual error will be generated.
In summary, a loosely displaced formation-keeping control strategy oriented to the optimal fuel consumption is proposed in this article. More specifically, the controller is composed of two parts: a fuel-optimal controller and a feedback controller. For the first part, the control objective is to minimize the fuel consumption while keeping loosely displaced formation, and the Legendre pseudo-spectral method (LPM) is introduced for solving the optimal trajectory and control force. Considering that the pseudospectral method provides a numerical discrete solution and the optimal control is an open-loop control, a feedback controller should be introduced to make sure that the fuel-optimal trajectory can be tracked accurately. In this article, inspired by Huang et al., 30 an adaptive finite-time sliding mode (AFSM) feedback controller is proposed, which can effectively compensate the uncertain perturbations and the linearization error of the system thereby improving the tracking accuracy. Finally, the simulation result has illustrated the fuel-optimality and the tracking accuracy of the control strategy in this article.
Modeling and descriptions
Nonlinear relative orbital dynamic equation for the formation satellite
Usually, a local-vertical local-horizontal (LVLH) frame is served as the reference orbit for describing the swarm satellites’ relative motion, which can be established by using the following principle: The origin is located at the center of the reference satellite and the coordinate axes are defined as

where
In space, the nonlinear dynamics of the satellite satisfies the following equation

where
We define

with

where


Schematic diagram of the frames and the satellite relative positions.
In this article, we assume that the reference orbit is a two-body elliptic orbit and it is worth to note that equation (3) is established in the LVLH frame, thus, we have

where a is the semi-major axis of the reference orbit, e is the eccentricity, i denotes the inclination of the reference orbit, and θc is the true anomaly of the reference orbit.
Continuous low-thrust propulsion system is widely used in recent years because of its high specific impulse and precise thrust output. In this article, we adopt continuous low-thrust as the control input and the propellant mass flow under continuous thrust is as follows

where m is the satellite mass, I sp is the specific impulse of the engine, and g 0 is the seal acceleration.
Description for the loosely displaced formation
In this section, the concept of the loosely displaced formation will be explained. As shown in Figure 2, if a desired formation has been given already, a loosely displaced formation can be described as: given a small loose region Λ, it satisfies the following constraint

where

Schematic diagram of a loosely displaced formation.
The objective of the formation-keeping control
In this paper, the fuel consumption is mostly concerned, thus, the objective function can be selected as follows:

The design of the control scheme via LPM-AFSM
For solving the formation-keeping problem mentioned above, a control scheme via LPM-AFSM is proposed in this section. To be specific, with LPM, we can solve the fuel-optimal control input and trajectory. In view of the optimal solution being discrete and the uncertain perturbations, a feedback controller via adaptive sliding mode theory is designed for keeping the tracking accuracy.
Definitions, lemmas, and assumptions
Definition 1
For the following system

if there exists a small region
Lemma 1
For system (14), if there exists a Lyapunov function V(

with
Definition 2
For any

The derivative of

Lemma 2
For any

Lemma 3
For the vector

Definition 3
For any

Assumption 1
In this article, we suppose the disturbance torque
Assumption 2
In this article, we assume that the reference satellite and the formation satellite have the same orbital period T, which can be obtain with

Solving the optimal trajectory via LPM
Commonly, a Bolza optimal control problem (Bolza-OCP) can be described as: given the following index function

find the optimal state variables

We know that it is difficult to obtain the analytic solution for the above optimal control problem and a numerical method is suggested. LPM has been widely used over the recent years to solve the optimal control problems, which can transform the continuous optimal control problem into a discrete nonlinear programming problem. The detailed algorithm steps of the LPM are as follows.


with

where τl (l = 0, 1,…, N) are the legendre-gauss-lobatto (LGL) points and they are the roots of the N-order polynomial PN (τ) with


with

Finally, equations (15) and (19) can be replaced by


where

Thus, the Bolza-OCP can be transformed to a standard nonlinear programming (NLP) problem and solved by using the LPM. Lots of literatures introduced the theory of the LPM. 34 –36 Ross and Fahroo 34 proved that the NLP problem obtained by the LPM converges to the continuous Bolza problem at a spectral rate. Fahroo and Ross 36 pointed that the Karush–Kuhn–Tucker multipliers of the NLP problem map linearly to the spectrally discretized covectors with the optimality conditions of the Bolza problem.
However, formation-keeping usually has a long-term duration, it is unpractical as well as unnecessary to make a global optimization for that. In view of the fact that the propellant mass flow rate is slow and the satellite mass can be regarded as a constant in a finite duration, the index function J 1 can be equivalent to the following

If we ignore the tiny uncertain perturbations

we can get a periodic system as

Utilizing Assumption 2, the formation-keeping duration can be divided into an integral number of circles with T, thus, we let

where

Hence, the loosely displaced formation-keeping control problem oriented to the optimal fuel consumption in this paper can be transformed to the following NLP problem:
Find the optimal state variables and control variables

for minimizing

subject to

The above NLP problem can be solved by using the PSOPT software, 37 which is an open source optimal control package written in C++.
The feedback control design via AFSM
In the section “Solving the optimal trajectory via LPM,” we have solved the fuel-optimal trajectory of the satellite by using LPM, however, there still exist two issues that cannot be dealt with: From equation (3), we can see it contains the unknown perturbation term We have already known that the optimal trajectory and control input are discrete with the LPM, however, the control system is continuous obviously.
Conclusively, for keeping the control accuracy, a feedback controller is quite essential to be taken into for improving the tracking accuracy. In this article, we proposed an AFSM tracking controller.
Firstly, by using the linear interpolation method, the optimal solution can be serialized as

where
Define

where the term

Define

with


For designing the feedback controller, a sliding mode surface is firstly given as

where
Remark 1
The sliding mode surface proposed here can ensure a finite-time stability for the system states. Compared with the conventional terminal sliding mode surface, the singularity problem can be effectively avoided. Furthermore, it possesses more clarity than the existing nonsingular sliding mode surface. 30
Because the boundary of


where k
3, k
4,
Theorem 1
For the system equation (32), if we suppose
The proof process for Theorem 1 is given as follows.
Proof
(i) Firstly, to illustrate the stability of

Utilizing equations (32) to (35), the derivation of V 1 is obtained as

In equation (37), the term

According to Huang et al., 30 the following inequality always holds

where

Thus,

where the expressions of

Thus, according to Lemma 1, the state variables
(ii) To illustrate the stability of

Take the derivation of V 2, we have

From Definition 1, we can conclude that there exists a small region

Utilizing equations (18) and (43),

where
Hence, the state variable
According to equation (20), the following inequality can be obtained
Hence, there exists a small region
Finally, both
From (i) and (ii), it can be concluded that the system in equation (32) is finite-time stable with the feedback control scheme as equations (33) to (35). Thus, Theorem 1 has been proved.
Test results
For proving the validity of the control strategy proposed in this article, we will make a test validation in this section. The test is simulated on a PC with Windows 10 OS, Core (TM) i5-8400 CPU and 8G RAM. The fuel-optimal solution is solved based on the PSOPT software version 3.9.3 and the Simulink toolbox is used to validate the convergence of the feedback controller.
In the test, a flying-around formation is selected as the desired precisely displaced formation, which can be expressed as

The test parameters are selected as follows: The reference orbital elements: The constraints: The initial satellite mass: The specific impulse and the seal acceleration: The formation-keeping duration: The uncertain disturbing force is assumed as
Figure 3 shows the desired and the optimal trajectory of the satellite in one orbital cycle. It is quite clear that the initial and final states are equal, that is, the satellite trajectory is varying periodically.

The curves of the fuel-optimal trajectory for the satellite. (a) The desired and optimal position, (b) the desired and optimal velocity, and (c) the three-dimensional desired and optimal position and velocity vectors.
In this article, we set the control parameters as
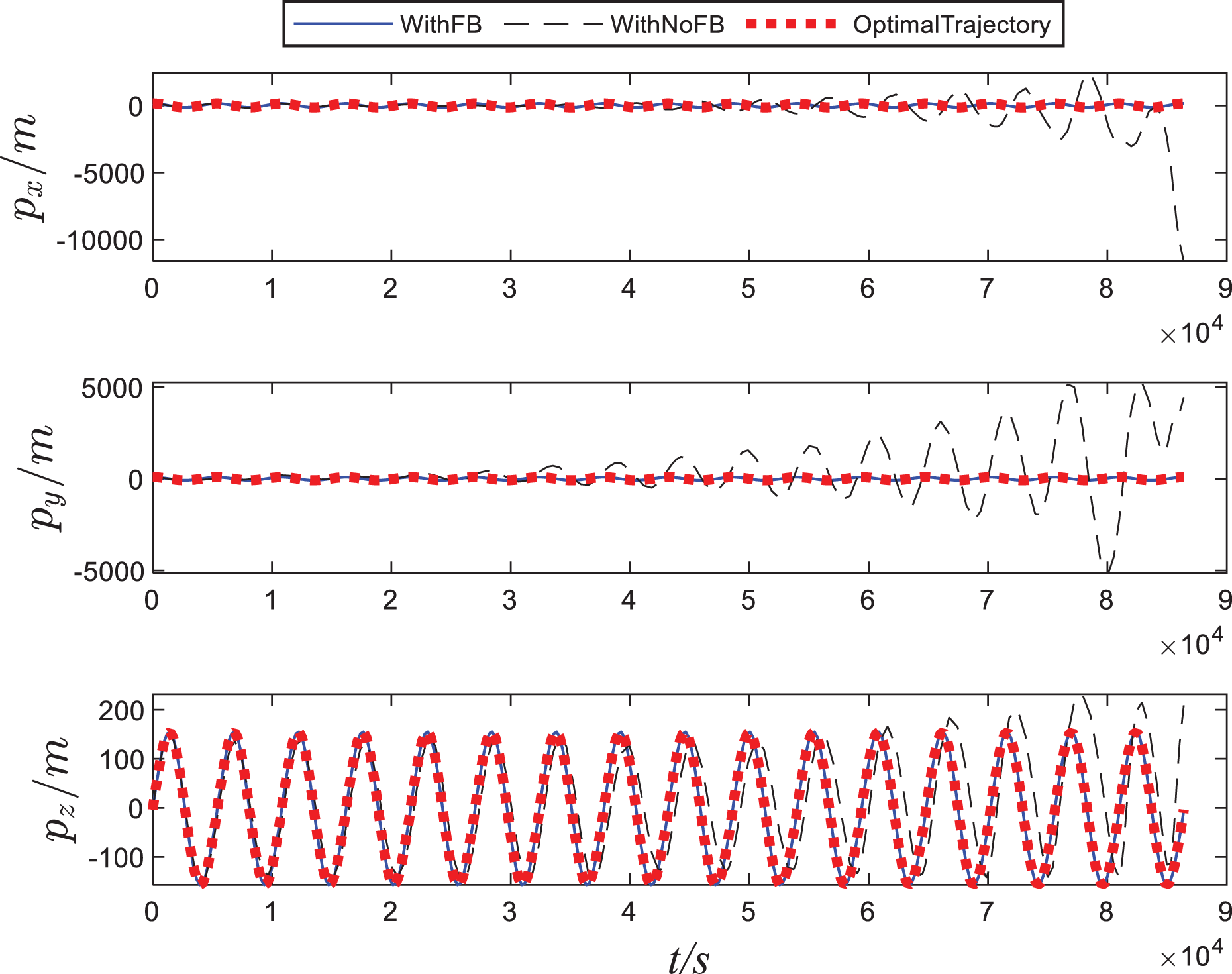
The comparison of the formation-keeping stability with and with no feedback control.
Figure 5 shows the fuel consumption of the satellite. From the figure, it can be seen that for keeping the desired formation, about 2.63 kg propellant is required and correspondingly, merely 0.68 kg propellant is required for keeping the optimal trajectory. In addition, we also can see that if the uncertain disturbance is ignored, the fuel consumption needed will be decreased to 0.56 kg, which is fairly close to 0.68 kg, that is, for keeping the optimal formation stability, it requires very little propellant to eliminate the effect of the uncertain disturbance. Hence, we can conclude that under a tiny external interference, the formation-keeping control strategy proposed in this article can effectively reduce the fuel consumption.
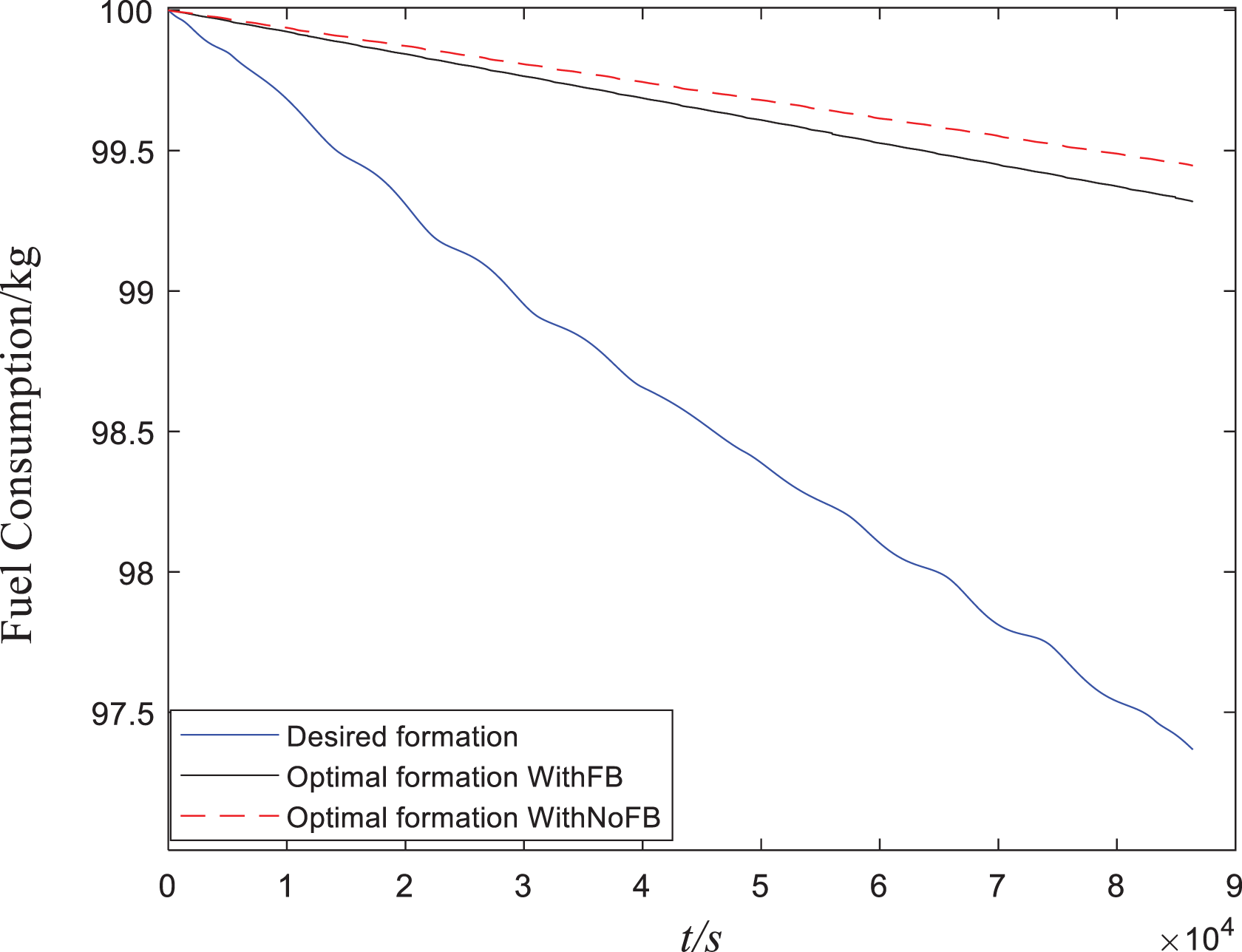
The comparison of the fuel consumption between the desired and the optimal trajectory.
Conclusions
For reducing the propellant consumption of the satellite swarm while keeping the formation, this article proposes a forward-feedback control strategy oriented to the loosely displaced formation. In advance of designing the controller, the concept of a loosely displaced formation is firstly introduced for the purpose of saving the fuel consumption. On this basis, the control is composed of two parts: an optimal forward control via LPM and a feedback control via AFSM. For the optimal control, the LPM is used to transform the optimal control problem into a nonlinear programming one and the fuel-optimal trajectory and control will be finally obtained with this method. After that, a feedback control scheme via AFSM is designed to make sure that the optimal trajectory can be accurately tracked by the satellite under the unknown disturbing force. Theoretical proof process has proved that the sliding mode surface designed in this article is finite-time stable and the tracking error will also converge to zero in a finite time. Finally, extensive simulation results demonstrate the effectiveness of the proposed control strategy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Natural Science Foundation of China under grants no. 61633008 and no. 61803115.