
Abstract
The object of this article is to design an observer-based adaptive neural network sliding mode controller for active suspension systems. A general nonlinear suspension model is established, and the electrohydraulic actuator dynamics are considered. The proposed controller is decomposed into two loops. Since the dynamics of the actuator is assumed highly nonlinear with uncertainties, the adaptive neural network is presented in the inner loop to ensure the control system robustness against uncertainties, and the self-tuning weighting vector is adjusted online according to the updated law obtained by Lyapunov stability theory. In the outer loop, a model reference sliding mode controller is developed to track the desired states of the hybrid reference model that combines skyhook and groundhook control methods. Besides, to obtain the unmeasured states of the system, an unscented Kalman filter is utilized to provide necessary information for the controller. Simulation results show that the exerted force can be tracked precisely even in the existence of uncertainties. Moreover, the proposed controller can improve the suspension’s performance effectively.
Keywords
Introduction
A general suspension system of vehicles consists of coil spring, shock absorber, guide agencies, and a series of mechanical linkages, which suspend vehicle body, transmit forces between vehicle body and wheels, and reduce vehicle body vibration. 1 The characteristics of vehicle suspension system are evaluated through riding comfort and handling stability. As the evaluation indicators of suspension system are contradictory with each other, passive suspension system with constant stiffness and damping parameters can hardly provide satisfactory performance under different driving conditions, including changing road conditions, vehicle speeds, and spring loads. 2 Active suspension systems have been thus introduced to improve suspension’s performance and achieve better control of the vehicle. The main components of active suspension systems are the implementing agencies, such as the hydraulic actuators and control strategies. Active suspension with hydraulic actuators can exert desired forces between sprung and unsprung masses. 3
Many active control strategies have been proposed for vehicle systems during the past several decades, for example, linear quadratic regulation, H-infinity control, and adaptive control. Vu et al. designed an active controller through solving a linear optimal control problem based on linear quadratic regulator to improve the roll stability of heavy vehicles. 4 An H-infinity and H-2 optimal controller was adopted by Shukla et al. to eliminate the vehicle vibration with various road inputs, 5 and an adaptive estimation and control method was presented by Na et al. 6 to guarantee transient and steady-state of suspension response. As real mechanical systems are highly nonlinear with parameter uncertainties, 7,8 accurate vehicle models are difficult to obtain, many different control techniques have been proposed. In Huang et al., 9 adaptive neural controller with adaptive law is used for the active front steering to reduce the response time and attenuate oscillatory steering in the corning condition under fast variant vehicle speed. A nonlinear backstepping scheme was developed by Lin and Huang 10 to improve the inherent trade-off between ride quality and suspension travel. Fuzzy systems can deal with uncertain and nonlinear dynamics effectively and have been utilized for active suspensions. 11 Sliding mode control is also widely used in vehicle dynamics systems for its simple structure and powerful control effort. 12 As the traditional sliding mode controller (SMC) can hardly be applied to complicated systems with unknown parameters, many research studies focused on the combination of control algorithms for uncertain systems, for example, fuzzy sliding mode control, 13 model-free sliding mode control, 14 and fuzzy neural network control. 15
For active suspension systems, the dynamics of the electrohydraulic actuator cannot be ignored. Hydraulic actuators can be considered as ideal force generators capable to track the target force accurately. However, due to inherent nonlinearities and measurement errors, the estimate of precise parameters of practical suspension system is difficult.
16
Also, the modeling of hydraulic actuator is more complicated for the hydrodynamic parameters and is seriously influenced by many factors, such as oil viscosity, fluid flow speed, and temperature. Therefore, compared with traditional robust control, adaptive control theory with self-tuning ability is more suitable for active suspension systems. In this study, an adaptive neural network SMC is proposed for active suspension system with electrohydraulic actuator dynamics, and the closed-loop control system is decomposed into two loops. Due to the inherent nonlinearities and uncertainties of the hydraulic actuator model, a novel adaptive radial basis function neural network sliding mode controller (RBFNN-SMC) is utilized in the inner loop to keep the actuator force tracking the desired force trajectory. In comparison with the traditional multilayer feed-forward network, RBFNN avoids unnecessary and lengthy calculations and enhances the online control effect.
17
–20
Weighting update laws are derived by using the Lyapunov method, and the asymptotic convergence performance and stability of the controller can be guaranteed. For the outer loop, a hybrid reference model that combines the skyhook and groundhook control strategy is introduced and a reference SMC controller is developed. Considering the nonlinearities in the quarter-car suspension model, an unscented Kalman filter (UKF) is employed to provide the outer loop controller with necessary state variables information. Compared with the recent active suspension controller, the main contributions of this study are: An adaptive RBFNN-SMC is utilized to track the desired actuator force. UKF is used to estimate the state of active suspension system with nonlinearities, uncertainties, and external disturbances.
The effectiveness of the proposed controller is verified through simulations under random road excitation.
The rest of the article is organized as follows. Quarter vehicle model and electrohydraulic actuator model are presented in the second section. UKF is used to estimate the suspension state and the estimation process is described in the third section. The closed-loop controller of active suspension system is presented in the fourth section. Simulation results are discussed in the fifth section. Finally, in the sixth section concluding remarks and future works are outlined.
Problem description
Suspension model
A quarter vehicle model with active actuator is developed, as shown in Figure 1. mb and mt represent the sprung and unsprung mass, respectively, and kt is the tire stiffness. The passive component of the suspension system consists of a linear damper cs and a nonlinear spring Fs . The road profile xr serves as a random input disturbance. xb and xt are the vertical displacement of sprung and unsprung masses, respectively. An electrohydraulic actuator is utilized to exert an active force Fa .

Quarter vehicle model with active suspension.
The quarter active suspension can be modeled as
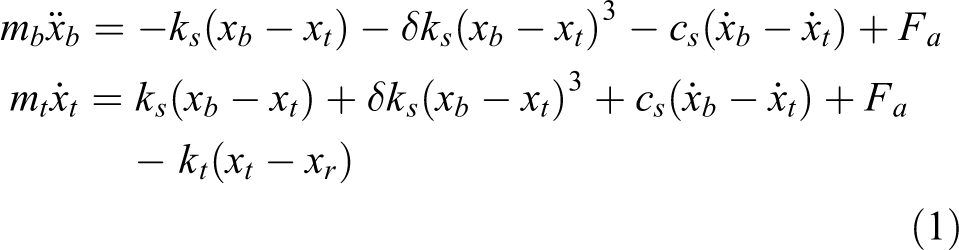
where δ denotes the nonlinear part of the spring force.
Modeling: Electrohydraulic actuator
The electrohydraulic actuator system shown in Figure 2 consists of three subsystems, that is, controller, servo-valve, and hydraulic cylinder. Dynamics for the actuator is given as 21

where

Diagram of the hydraulic actuator.
The servo-valve model is as

where u is the control signal. The conversion gain Kc
converts control voltage into the displacement of the sliding spool xv
. As the time constant τ is typically small, equation (3) can be translated into

Due to the inherent nonlinearity of the hydraulic system, estimation of accurate values of the system is difficult; moreover, some parameters are slowly time-varying. For better control performance, all uncertainties in equation (4) are lumped into unknown functions. Therefore, the dynamics for the hydraulic actuator can be simplified as

where
Assumption 1
The variation bound for
Assumption 2
The variation bound for

UKF observer design
Most research studies focused on desired force control algorithms under the assumption that all suspension system states are measurable. Actually, because of the high cost or limitations of technology, some states are difficult to measure. Therefore, a state observer is necessary to identify the state information of the suspension system. 23 Since the extended Kalman filter is based on Taylor series expansion and linearizes the nonlinear system by keeping the first-order item, in case of severe system nonlinearities the estimation precision of the parameters is low. Based on unscented transform (UT) and statistical linearization technique, the UKF can improve estimate accuracy.
UT transformation
UT undergoes a nonlinear transformation by calculating the statistics of a random variable.
24
Assume state vector


where n represents the dimension of the state vector

Suspension state observation
The state vector

where
The continuous-time suspension model of equation (9) can be rewritten in the discrete-time form

where
The detailed computation algorithm of the UKF observer is presented in Table 1.
Computation algorithm of the UKF state observer.

Controller design
Due to the influence of model nonlinearity, parameter uncertainty, and external disturbance, active suspension system with traditional controller can hardly obtain desired performance. To deal with this, an adaptive neural network SMC is proposed in this section. For the convenience of control, the control system can be divided into two loops: the outer loop that represents the desired force generator, and the inner loop indicates the subsystem that includes the hydraulic actuator. To guarantee the stability of the closed-loop controller and achieve satisfactory characteristic, a model reference sliding mode controller (MRSMC) is designed for control of the outer loop, and an adaptive neural network is employed in the inner loop to track the desired actuator force in the presence of disturbances and modeling errors. The diagram block of the designed adaptive controller is shown in Figure 3.

The diagram of control algorithm.
Designing outer loop
As shown in Figure 4, the hybrid reference model that combines the skyhook and groundhook control strategy is selected as a reference for the MRSMC. The skyhook controller 25 is a comfort-oriented control strategy using a damper installed between the sprung mass and the skyhook to suppress sprung mass vibration. The groundhook control strategy, proposed by Valášek et al., 26 is one of the typical road-holding-oriented control strategies. The hybrid reference model 27 –29 is preferred because trade-offs among riding comfort, handling stability, and packaging can be considered.

Reference model.
The sprung mass motion in equation (1) can be rewritten as

where
The controllable force of the hybrid reference model can be expressed by

where
The dynamics of the virtual reference model can be described by

where
The SMC, a high-robustness system control technique, forces the state-trajectory toward a designed sliding surface by applying a discontinuous control signal. According to the motion equations of the suspension model and reference model, the tracking error can be defined as

Choosing the sliding surface as

where

where

To guarantee that the system state asymptotically switches to the sliding surface, 30 the SMC controller includes the equivalent control and the switching control law

where

Designing inner loop
As shown in Figure 5, the RBFNN approximates the uncertainties in the simplified dynamic model of the hydraulic actuator and the SMC gives asymptotic convergence characteristic of the tracking error. Control voltage u is calculated by the control algorithm.

The diagram of force tracking controller.
Lemma 1
Let

where

where x is an m-dimensional input vector.
Based on RBFNN described above, a novel adaptive RBFNN-SMC for the electrohydraulic actuator system is developed in the inner loop. Consider the desired force as the tracking target, define the sliding surface as

The derivation of the sliding surface can be calculated as

Substituting equation (5) into equation (22)

By selecting exponential reaching law, the control voltage u can be obtained

Substituting equation (29) into equation (28) gives

where

where

To prove the stability of this control system and to find the update laws for

where

Therefore, the updated law can be given as

Hence,

Then, it may be concluded that

To satisfy

therefore,
Remark
In practical engineering systems, a large value of ϕ leads to fast switching of SMC, which causes severe chattering. To suppress chattering during the switch control of SMC, an improved discontinue control law is proposed 32

where
UKF is a kind of feedback observer. According to the separation principle, 33 it will not change the controllability and observability of the system. So, the controller and observer can be designed independently. In addition, since the convergence speed of the observer is much higher than that of the controller, the closed-loop control system is stable when the UKF converges.
Simulations
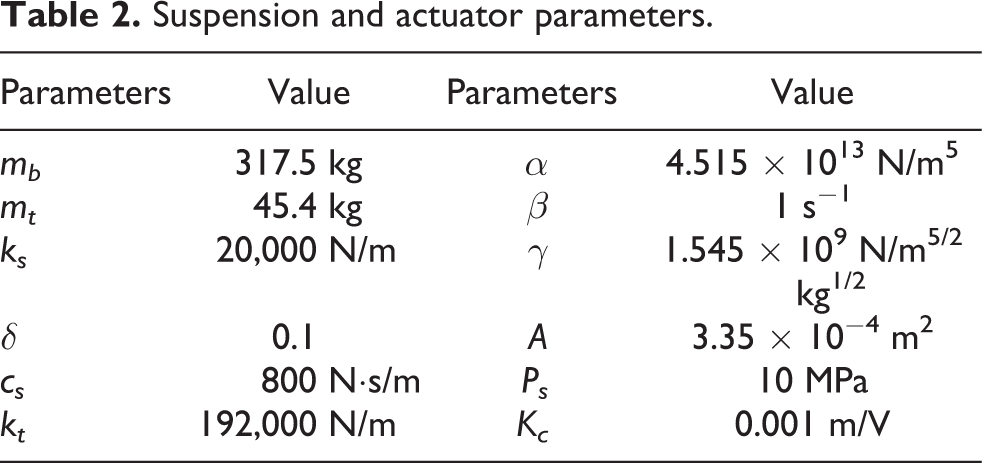
The control goal of active suspension system is to improve riding comfort while maintaining constant contact between tires and road surface. Riding comfort and road holding are measured by sprung mass acceleration and tire deflection, respectively. To evaluate the effectiveness of the designed controller, two typical road profiles are considered: random road excitation and bump road excitation. Performance analysis of skyhook (μ = 1) and hybrid (μ = 0.58) control strategies on active suspension systems are carried out. Suspension model parameters and actuator parameters are listed in Table 2, and the controller parameters are given in Table 3.
Suspension and actuator parameters.
Controller parameters.

Random road excitation
The model of the road roughness in the time domain can be deduced by integrated Gaussian white noise as 34

among which w(t) is Gauss white noise; n 00 = 0.011 is cutoff space frequency; n 0 = 0.1 m−1 represents the reference spatial frequency; Gq (n0 ) is the road roughness level, which is chosen as 512e−6; u = 20 m/s is vehicle velocity. The profile of single wheel excitation is plotted in Figure 6.

Time history of single wheel disturbance input.
The curves of estimated sprung mass velocity and unsprung mass velocity are shown in Figure 7(a) and (b). From the figures, it can be concluded that the UKF state observer can estimate the system states effectively under random road excitation.

The estimation results of state parameters under random road excitation. The estimate of (a) sprung mass velocity and (b) unsprung mass velocity.
To further evaluate the observation effect of UKF, quantitative analysis of signal processing results is carried out using the following tracking performance evaluation criteria 35

where x is the true value,
The dynamic responses of sprung mass acceleration, suspension deflection, and tire deflection with random road excitation are plotted in Figure 8(a) to (c).

Time history of single wheel random disturbance input. (a) Sprung mass vertical acceleration, (b) suspension deflection, and (c) tire deflection under random road excitation.
From Figure 8(a), it can be seen that the impact from random road disturbance on sprung mass’s vertical acceleration is smaller using skyhook and hybrid controller compared with passive suspension, and the root mean square (RMS) value of vertical acceleration is about 40% and 25% smaller than the passive system. In Figure 8(b), the RMS values of suspension deflection with skyhook and hybrid controller are 0.0015 and 0.0016, respectively, which are all smaller than the passive case in which RMS value is of 0.0023. The RMS value of tire deflection with hybrid controller is 0.000853, which is smaller than the passive model with 0.00089 and skyhook controller with 0.001.
Figure 9(a) to (c) compares the PSD of sprung mass motion, suspension stroke, and tire deflection under random road excitation.

Suspension performance comparisons under random road excitation. The power spectral density (PSD) comparison of (a) sprung mass acceleration, (b) tire deflection, and (c) suspension deflection.
From the time domain and frequency domain results of the controller, it can be indicated that both skyhook and hybrid controller can achieve better riding comfort of the vehicle. However, the pure skyhook only focusing on ride comfort, the handling performance is seriously deteriorated. The hybrid control strategy achieves satisfactory control effects in improving the riding comfort and handling stability.
Figure 10 shows that the control force generated by the hydraulic actuator can follow the hybrid control force ideally despite the existence of uncertainties. Figure 11 plots the approximation characteristic of the unknown function
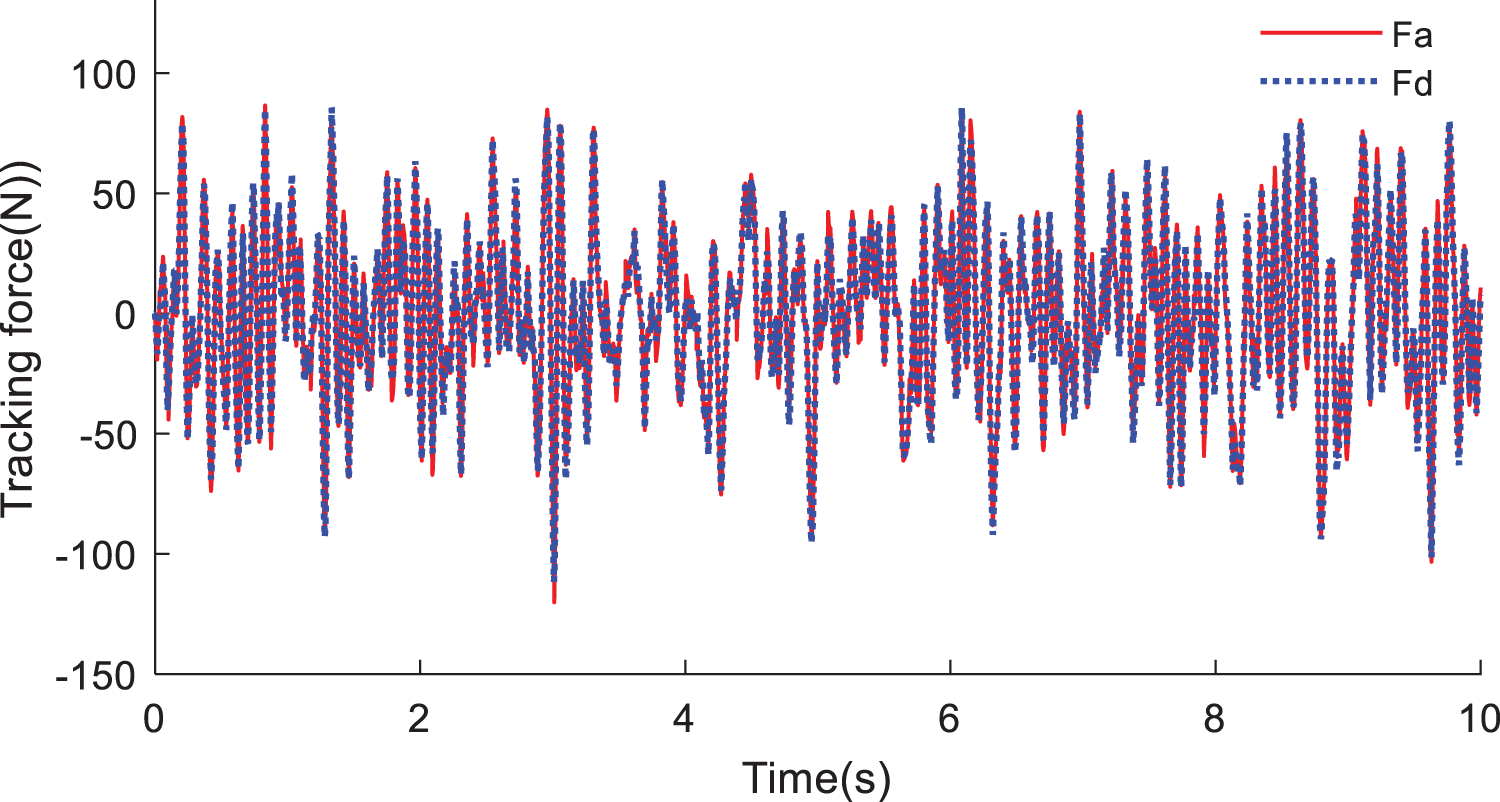
Force tracking performance.

Approximation of the unknown function
Bump road excitation
A single bump excitation is considered in this section, and the model of the road excitation can be written as

where h = 0.005 m and l = 2.5 m are the height and length of the bump, respectively, and v = 20 km/h is the vehicle speed. The time history of the bump profile is plotted in Figure 12.

Time history of bump road profile.
The control results of sprung mass vertical acceleration, suspension deflection, and tire deflection over a bumpy terrain are plotted in Figure 13(a) to (c). Compared with passive suspension, sprung mass acceleration and suspension deflection shown in Figure 13(a) and (b) can attenuate faster with both skyhook and hybrid controllers. The peak value of sprung mass acceleration with skyhook controller is significantly lower than that of hybrid controller and passive model. RMS value of the sprung mass acceleration is of 0.3788, 0.5448, and 0.823 for skyhook, hybrid, and passive system, respectively. The maximum tire deflection value of hybrid controller shown in Figure 13(c) is smaller than that of skyhook and passive suspension, and the RMS values of skyhook, hybrid, and passive system are 0.00049, 0.0012, and 0.0014, respectively.

Time history of single wheel bump disturbance input. (a) Sprung mass vertical acceleration, (b) suspension deflection, and (c) tire deflection under bump road excitation.
From the above simulation result, the proposed hybrid controller can achieve better performance in reducing the sum of acceleration, providing adequate rattle space while keeping the wheel in constant contact with the road surface. In addition, since the changes in road profile are often sudden, after a short reaction time, active suspensions with the proposed controller can achieve better ride comfort and handling stability as evidenced by Figure 13.
Conclusions and future work
In this article, to improve the vehicle vertical performance, an adaptive neural network SMC is proposed to provide the optimal control force for the active suspension system. A hybrid reference model that combines skyhook and groundhook control strategies is designed for the outer loop of the controller. By using an adaptive RBFNN-SMC, the inner loop focuses on solving the problem of force tracking of the electrohydraulic actuator system with time-varying uncertainties. Meanwhile, considering that not all state information can be measured by sensors directly, a UKF observer is designed. The simulation results demonstrate that, by using the adaptive RBFNN-SMC, electrohydraulic actuator force can follow the hybrid control force ideally despite the existence of uncertainties. Moreover, a good balance between the riding and handling performance is achieved by using the proposed hybrid control strategy.
In the future works, the influence of in-wheel motor on vehicle vertical vibration will be considered, and critical test conditions will be applied. Besides, the longitude and lateral influence will also be taken into account.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.