
Abstract
The integrated navigation method based on star sensor celestial angles (altitude angle and azimuth angle) is proposed to serve the need for rapidly responsive, reliable, and precise of a hypersonic vehicle under a sophisticated environment. An integrated navigation algorithm suitable for large azimuth misalignment is established under launching point inertial coordinate and local geographical coordinate system based on altitude angle and azimuth angles. Meanwhile, a Bayesian method for data dropouts aided by the strapdown celestial angles is presented for the rapid variability in the celestial star angle with active galaxies. A nonlinear Bayesian filter is applied to implement the simulation on account of the nonlinear feature of the state and measurement equations. The simulation results showed that the Bayesian method for integrated navigation data dropouts could be accomplished by altitude angle and azimuth angle aiding in both launching point inertial coordinate and local geographical coordinate systems, which converge to 1′ in 10 s. The method indicated that the integrated navigation significant errors derived from initial localization and initial attitude alignment could be modified by the strapdown inertial navigation system (SINS) supported by the star sensor’s celestial angle in the local geographic coordinate system in the early launch stage. For the seconds of the flight phase, the integrated navigation aided by celestial angles in the launching point inertial coordinate system was guaranteed for the feasibility and validity. During the flight, the feasibility and validity of integrated navigation were guaranteed aided by celestial angles in launching point inertial coordinate system.
Keywords
Introduction
Due to the long-term flight of the vehicle in the adjacent space during a long-distance trip, it has unique characteristics in the aerospace field, and the adjoining area has become a hot spot in the world. 1 Navigation technology in the adjacent space has become a critical technology that is urgently needed to strengthen research. Particularly, hypersonic vehicles have the characteristics of fast flight speed, high attack power, and global reach and have high requirements for navigation system reliability, start-up time, and environmental conditions. 2 –11 The strapdown celestial navigation measures natural celestial bodies to determine the vehicle location or heading, facilitating an independent navigation system. In the existing direction-finding technique, the star sensor is based on the star reference system and is the most accurate and minimally drifting attitude measuring component to date. 2 –5 The above advantages make the research and application of star sensors very active, which have been widely used in various fields such as Earth remote sensing, earth mapping, planetary mapping, interstellar communications, and intercontinental missiles. 6 –9 The star sensor and the inertial navigation system for integrated navigation have strong complementarity in performance. That integrated navigation can be used to calibrate the reference of inertial navigation devices and determine the attitude of the hypersonic vehicle. 7
There is an essential feature of strapdown celestial navigation theory that the observation is the altitude or orientation of the celestial body. The star sensor is mounted on the carrier body, which can measure the strapdown celestial guidance of the altitude angle and azimuth angle about the body coordinate system directly.
Currently, the study addresses the geographic system as the navigation system to utilize the launcher facilities and other infrastructure systems in the ground station. 10 Wang et al. 3,11 proposed the SINS/global navigation satellite system (GNSS)/celestial navigation system (CNS) integrated navigation scheme of the hypersonic vehicle with the geographic navigation system. It concluded that the attitude errors were improved after the navigation system assisted by the strapdown celestial angle. However, in previous work, an alignment error model on the assumption that the error angle of the Euler platform was small misalignment angle error. With the improvement of SINS technology, the navigation in the near-space hypersonic vehicle is limited by slight misalignment angle and linear error model, and the nonlinear error models of various large misalignment angles have received extensive attention. Previous studies of integrated navigation had emphasized the potential necessity for the navigation of hypersonic vehicles using the geographic scheme without small misalignment angle assumptions.
The responsive space lift requires the hypersonic vehicle carries a weapon capable of delivering an active payload to a user-specified orbit within hours. This contribution develops the conceptual mechanics of launching point missions in ballistic missile space orbit and presents results based on navigation strategy considering multiple celestial stars’ gravitational perturbations. 12 –18 The launching point inertial system is described as the long-range missile navigation reference to provide accurate spatial motion parameters and system control. 14,18 To obtain a consistent coordinate calculation of the ballistic missile, the coordinate system of a hypersonic vehicle platform is always parallel with the launching point inertial coordinate frame during the flight. Strapdown celestial guidance of single-star schemes of the strapdown celestial guidance in the launching point inertial system adopting “the altitude angle and the azimuth” matching is broadly applicable with the fast and accurate integrated navigation of the near-space hypersonic vehicle. The celestial altitude azimuth matching of the star sensor based on the body is proposed in the literature, 15 –19 and the rapid transit alignment method of the hypersonic vehicle with the launching point inertial system is proposed as the navigation system.
Meanwhile, concerning higher frequency vibrations and force gravitational fields influence of perturbations under complex environments of vehicle trajectories, rapid variability from active galaxies is susceptible to interference during stochastic measurement of celestial angles. 20 The setting of integrated navigation estimation is the Bayesian sequence since the measurements are randomly dropout, which involves a two-step prediction on the Chapman–Kolmogorov formula and two-step update on Bayes’ rules. In the case, a nonlinear Bayesian method for data dropouts aided by the strapdown celestial angles is presented.
The novel contributions are summarized as follows. Firstly, we provide optimizing models of the significant misalignment angle errors in two different navigational coordinate systems. Secondly, we fuse the star calendars’ knowledge with declination and the Greenwich hour angle and the meridian angle from star sensor in the dynamic observation equations. Finally, we develop celestial observation angle-assisted hypersonic vehicle integrated navigation methods in coordinate frames of launching point inertia system and geographical system. Our work proposes a Bayesian filtering method for data dropouts aided by the strapdown celestial angles in case of the rapid variability in the celestial star angle with active galaxies.
The article is organized in the following remainder. In the second section, we develop the large misalignment angle nonlinear error model of different navigation coordinates. In the third section, we describe the model of integrated navigation nonlinear equations. The fourth and fifth sections present efficient algorithms and simulation analysis in navigational coordinate systems in case of measurement data completeness and data dropouts. We conclude in the final section with a discussion.
The model of nonlinear error using large misalignment angle
Integrated navigation system model of state error propagation
The navigation system model under launching point inertial coordinate and local geographical coordinate can be obtained according to mathematical platform misalignment angle error equations, velocity, position error equations, and the process noise of propagation caused by those gyro and accelerator stochastic drift.
Launching point inertial system model of state error propagation
The symbols in the launch point inertial system model of state error propagation are as follows. The master’s inertial body coordinate system is defined as bm, for instance, the carrier coordinate frame or the star sensor carrier coordinate frame, and the slaver-inertial body coordinate system is bs. The
(1) Mathematical platform misalignment angle error equation ϕ

and
(2) Velocity error equation

where δVi
= [δvx δvy δvz
]T, f b
is the measurement of the slaver navigation accelerometer, δf b
is the accelerometer measurement error of the slaver INS, δgi
is the acceleration error of gravity, and
(3) Position error equation
The differential equation of position error in the inertial coordinate system is

(4) Attitude transformation matrix

where bm is the body of the master system, bh is a slaver-inertial horizontal coordinate system,
The geographical system model of state error propagation
(1) Mathematical platform misalignment angle error equation

The symbol c is the geocentric inertial coordinate system.
(2) Velocity error equation

(3) Position error equation



Due to the instability of the height channel of the inertial navigation system, external height damping information is introduced to resolve the divergence of the height channel. We do not describe the detail of the high damping effect. Attitude transformation matrix and wing flexural deformation error are similar to the previous work in launching point inertial system.
Integrated navigation system model of state equations
Navigation is used as the reference frame, and the error propagation equations of the launching point inertial system and those of the geographic system are concluded as follows:
Here, δS and δV represent the position and the velocity errors of the slaver navigation relative to the master navigation, respectively. The state equation of the system is
Nonlinear observation model matching of altitude angle + azimuth angle
The observation model of altitude angle and azimuth angles are established using launching point inertial coordinate and local geographical coordinate, respectively, which is suitable for significant misalignment integrated navigation.
The observation equations of “elevation angle + azimuth angle” in launching point inertial coordinate frame
The star sensor observation device is fixed on the flight carrier, and the starlight is tracked. Star patterns matching is observed by the star sensor and which fabricates the height angle (Hb ) and the azimuth angle (Ab ) of the star sensor system (i.e. the carrier coordinate bs). Physical measurements are altitude angles (Hob ) and azimuth (Aob ) corresponding to a navigation star.

where vh and va are the star sensor angle measurement noise.
Due to the position error, velocity error, installation error, and lever arm deflection effect of the slaver navigation system, there are calculation errors in the altitude angle (Hpb ) and the azimuth angle (Apb ) solved by the slaver system

The difference between Hpb and Apb of the slaver solution and Hob and Aob actually measured by the star sensor is

The altitude angles and the azimuth angles in different coordinate systems associated with the star sensor are shown in Figure 1.

Star sensor’s altitude angles and azimuth angles.
The observation equations are calculated as follows:
Step (1) : Altitude angle and azimuth of the inertial solution
The azimuth angle Apt and the altitude angle Hpt in the local geographic system is obtained by the Longibs and the Latitbs , which is solved by the navigational star calendar and the slaver navigation


where Dec is the declination, Gha is the Greenwich hour angle, and tEc is the meridian angle


The solution of altitude angle Hpb and the azimuth angle Apb are obtained by the attitude transformation matrix in the projective coordinate system.
The process is as follows:
(1) Calculate the starlight vector rpt in the local geographic system from the altitude angle Hpt and the azimuth angle Apt

(2) Using the attitude transformation matrix
(3) Now we get the geometric relationship between the starlight vector, the altitude angle and azimuth angle and the attitude transformation matrix, the solution of altitude angle Hpb and the azimuth angle Apb are obtained in the projective coordinate system

and
Step (2): Establish a measurement model of the altitude angle and azimuth angle
The calculation errors of the altitude angle and azimuth of the star sensor coordinates are mainly caused by the initial orientation errors and position error. The orientation errors bring the misalignment angle of the mathematical platform. The position error of the inertial coordinate of the launching point is obtained by the compensation state variable, and the local latitude and longitude are obtained according to the conversion relationship between the inertial launching point and the local geographical coordinates.
We develop a new expression as the position error compensation of launching inertial point is corrected as
then the altitude angle (Hotl ) and azimuth (Aotl ) in the compensated geographic coordinate system are obtained as

where


then,
The matrix
The starlight vector
The altitude angle and azimuth angle in the carrier coordinate can be obtained by the starlight vector
Using the above attitude transformation relationship


According to the steps (1) and (2), the integrated navigation measurement model based on the star sensor is matched by altitude angle and the azimuth angle

The observation equations of geographic coordinate frame “elevation angle + azimuth angle”
We develop a new relationship between the starlight vector of the altitude angle/azimuth angle and SINS errors in the geographic coordinate frame.
The relationship between the starlight vector of the altitude angle/azimuth angle and SINS errors
The starlight vector

Due to the error in the position and attitude provided by the inertial navigation, the starlight vector

In equation (26),

Considering the error caused by the misalignment angle, we do not make the small-angle hypothesis

where

According to equations (25) and (26),

Substituting equations (27)–(29) into (30) yields

Using the position and attitude of the slaver navigation, and querying the right ascension and declination of the navigation star library,

Starlight vector error model of the observation equation
Inertial navigation solves the existence of two types of error sources, position and attitude, which cause an error between the solution of the altitude angle

Comparing equations (31) and (33), we obtain

Substituting equation (32) into equation (33) and expanding it, we get

expanding the third line of equation (35), it obtains

From the first line and the second line of equation (35), it obtains

The observation is the difference between the slaver navigation solution of altitude/azimuth angles and those celestial angles of vehicle-mounted star sensor, which gives a detailed equation

According to the equations of the above nonlinear system, the two different navigation coordinates are used by the matching of star sensor celestial angle. The nonlinear Kalman filter algorithm, such as the sparse grid, is used to obtain the estimation. 21,22 The results of attitude misalignment angles and attitude estimation errors are presented to evaluate the alignment effect in the fourth section.
Bayesian method for data dropouts about the strapdown celestial angels
Dynamic variability from active galaxies is susceptible to atmospheric conditions during the stochastic measurement of celestial angles. Measuring and transmitting the celestial angles face dropout risk of all kinds unavoidably. The uncertainties in an astronomic measurement exist in model parameters and external disturbance seriously. In this case that the measurements are randomly drop out and uncertainty, a nonlinear Bayesian robust method for data dropouts aided by the strapdown celestial angles is presented. The estimation of measurement noise probability distribution function (PDF) is not available in the direct filter such as the extended kalman filter (EKF) or unscented kalman filter (UKF) Gaussian filter.
The system with measurement dropout and uncertainty is

The dropout of measurements is a binary stochastic variable rk
∈ R and rk
is set to 0 or 1 according to whether or not the measurement is arriving. The probability of pk
managing the dropout measurements from the star sensor is defined over the interval [0, 1].

The measurement noise vk
is augmented in state vectors as follows. yk
is the measurement sequence at the noise and short for

and

and a two-step update on Bayes’ rules is as follows:
The PDF of the state (2) is Gaussian as follows

where
A nonlinear Bayesian robust for data dropouts is as follows.
The conditional mean

1. Construct and propagate Sigma points, k = 1, 2,…
Factorize






2. State and measurement noise estimation update


















We can calculate the state vectors and the covariance matrices recursively for measurement dropouts. However, we need to be reminded that conditions for bounded exponents, including that, but not limited to, the probability pk has an upper limit.
Analysis of the state celestial angle in two different navigation coordinates
Now we will present the performance of the models aided by strapdown celestial angles and the Bayesian method for data dropouts of celestial angles.
System simulation condition
The simulation was implemented using the missile described in Pehlivanoğlu and Ercan.
24
The initial site of the vehicle is at the longitude 118.8°, and the latitude 31.98° with 10 m error. The gyro and accelerator parameters are as follows:
System simulation results
The models of the altitude and azimuth angles based on the star sensor
We aim at a reliable, accurate, and fast integrated navigation in complex environments. The error of the slave navigation of the missile carrier is corrected by the high-precision attitude information of the star sensor. The models of integrated navigation are proposed by the altitude and azimuth angles based on the star sensor.
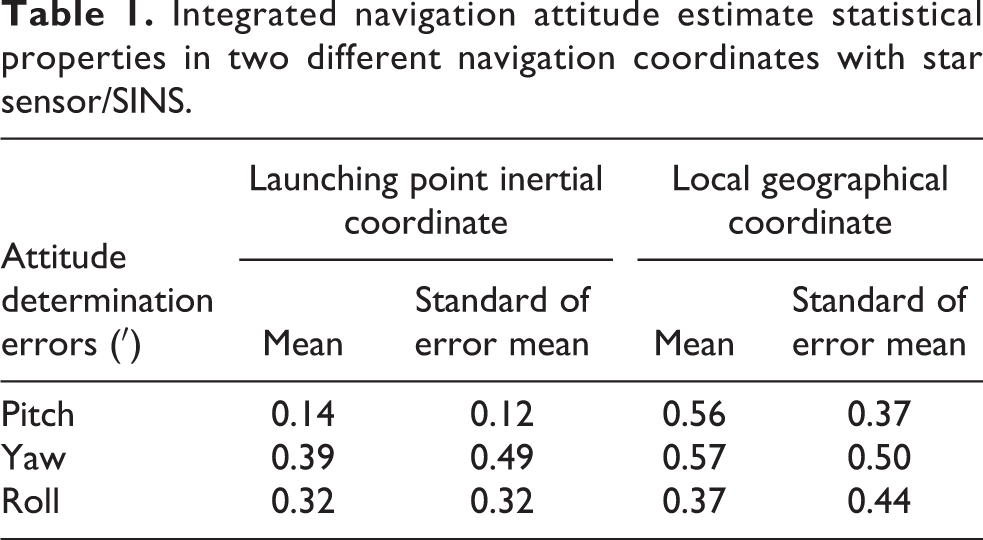
The attitude misalignment error characteristics of star sensor/SINS using “altitude + azimuth angle” in two different navigation coordinates are shown in Table 1, and Figure 2. Those statistical error property in attitude angles is listed in Table 1. The means and the standard of error mean characteristics in launching point inertial coordinate are converged in 0.5 min of arc in the 30 s; those in local geographical coordinate are converged in 1 min of arc. The realizations of the convergence curve are shown in Figure 2.The integrated navigation of strapdown celestial guidance of estimation curves can converge within 10 s, and the estimated error means limited within 1 min of arc in the launching point inertia frame and the geographic coordinate frame.
Integrated navigation attitude estimate statistical properties in two different navigation coordinates with star sensor/SINS.

(a) to (f) Attitude misalignment angles and attitude determination of hypersonic vehicle aided by star sensor celestial angles in different navigation coordinates.
Due to more consideration of the various perturbation factors in the launching point inertia frame, the model of the launching point is more accurate than the local geographic coordinate system model, and the estimation accuracy is better than the local geographic coordinate frame. The long-range missile and hypersonic vehicles often adopt the launching point inertia system, which helps to describe navigation benchmarks and provide accurate spatial motion parameters and system control. Therefore, the strapdown celestial guidance of the “altitude angle + azimuth angle” matching of the launching point inertial frame can achieve fast and accurate integrated navigation of the slaver navigation of the near-space hypersonic weapon platform.
The Bayesian method for data dropouts aided by the strapdown celestial angles star sensor
Measuring and transmitting the celestial angle will inevitably be challenged by the randomness and uncertainty of data loss. Consider the probability of dropout measurements pk is 0.9. The attitude misalignment error characteristics are shown in Table 2 and Figure 3, which are general direct filter without data dropout, 21 direct filter for data dropouts, 30 and the proposed Bayesian method for data dropouts. Direct filter without data dropouts is suitable for integrated navigation aided by the strapdown celestial angles. Next to dealing with data dropouts, the direct filter is weak convergence during the first 5 s, where the variance array of tremendous observation noise is added into the filter. It is defined as the measurement noise as infinity, which is equivalent to one-step state prediction, only propagating the previous state but no measurement estimation updating. It inevitably leads to the decline of filtering performance. Furthermore, the Bayesian filter is implemented correctly in the system state estimation and the measurement noise estimation, which has the performance close to direct filter without data dropouts.
Attitude estimate statistical properties for data dropouts.

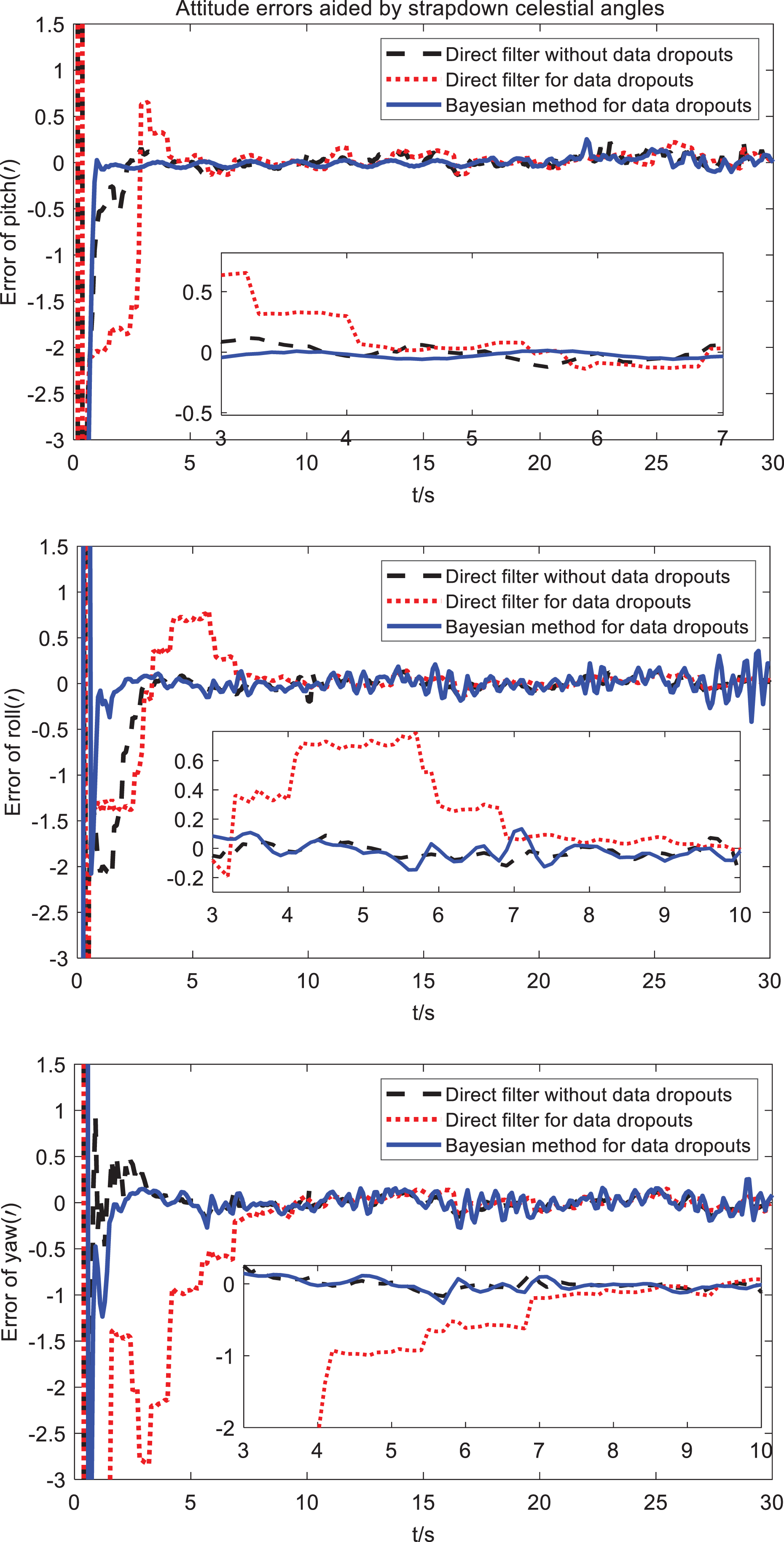
(a) to (c) Attitude estimation errors for data dropouts.
However, the probability of data dropouts is too high, the proposed Bayesian filter will also diverge. The simulation experiment results are shown in Figure 4. When the probability of data dropouts is up to 95%, the proposed Bayesian filter is divergent during the 15 s and 20 s. We note that multi-constellation cooperative navigation aided by strapdown celestial angles can be adopted to improve the system’s dependence on a single constellation owing to dangerous loss probability.

Performance comparison at different packet dropouts probability.
From the above-mentioned integrated navigation results, it is known that the vehicle trajectory is valid under the same parameter setting conditions. The strapdown celestial guidance of “altitude angle + azimuth angle” integrated navigation models of the local geographic system and the launching point inertial frame is practical. The initial localization and orientation errors occurred in the mobile launching of a ballistic missile, and the drifts of the reference coordinate of the inertia guidance system have existed in the launching point inertia frame. The two navigation mechanisms are arranged as follows. The strapdown celestial guidance of single-star schemes in local geographical coordinate is proposed to correct the initial localization and orientation errors that have occurred in the mobile launching of a ballistic missile in the first step. During the flying course, the strapdown celestial guidance in launching point coordinate is used to provide navigation reference to meet the requirement of quick response to spatial emission. Moreover, owing to the star celestial angle temporal malfunction with active galaxies, the proposed Bayesian method for integrated navigation data dropouts could be accomplished in 10 s of fast convergence within 1 min of arc.
Conclusion remarks
In this article, the simulation results show that the strapdown celestial observation angle-assisted hypersonic vehicle of two navigation coordinates can effectively achieve the fast and accurate integrated navigation in the near space. Before the launch, the celestial observation angles of the geographic navigation system are used to assist the vehicle to roughly correct the initial localization and orientation errors occurred in mobile launching of ballistic missile and the drift of the reference coordinate of the inertia guidance system. During the flying mission, the inertial navigation system of the launching point is used to provide the navigation reference for the vehicle, which responses quickly to spatial emissions. The proposed integration of the strapdown celestial angles and the Bayesian method for data dropout solves the problems of rapidly responsive, reliable, and precise of a hypersonic vehicle under a sophisticated environment. The proposed navigation approaches can be exploited to spatiotemporal cooperative navigation, including SINS, celestial angle measurements among multi-constellation, and the environmental knowledge for future work.
Footnotes
Acknowledgements
The authors thank the associate editor and the anonymous reviewers for their valuable suggestions on improving the text.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (no. U1804161, 51805148), the National Key Research and Development Program of China (no. 2017YFB0102603), Key Laboratory of Micro Inertial Instrumentation and Advanced Navigation Technology of Southeast University (Type B) Open Fund Project No. SEU-MIAN-201702, grants from NVIDIA and the NVIDIA DGX-Station/DRIVE PX 2 Auto Chauffeur, Henan Key Project of Science and Technology Research (nos 172102210214, 182102210095), the Science and Technology Innovation Planning Project of Ministry of Education of China, and the Fundamental Research Funds for the Central Universities.