
Abstract
For the inverse calculation of laser-guided demolition robot, its global nonlinear mapping model from laser measuring point to joint cylinder stroke has been set up with an artificial neural network. Due to the contradiction between population diversity and convergence rate in the optimization of complex neural networks by using differential evolution, a gravitational search algorithm and differential evolution is proposed to accelerate the convergence rate of differential evolution population driven by gravity. Gravitational search algorithm and differential evolution is applied to optimize the inverse calculation neural network mapping model of demolition robot, and the algorithm simulation shows that gravity can effectively regulate the convergence process of differential evolution population. Compared with the standard differential evolution, the convergence speed and accuracy of gravitational search algorithm and differential evolution are significantly improved, which has better optimization stability. The calculation results show that the output accuracy of this gravitational and differential evolution neural network can meet the calculation requirements of the positioning control of demolition robot’s manipulator. The optimization using gravitational search algorithm and differential evolution is done with the connection weights of a neural network in this article, and as similar techniques can be applied to the other hyperparameter optimization problem. Moreover, such an inverse calculation method can provide a reference for the autonomous positioning of large hydraulic series manipulator, so as to improve the robotization level of construction machinery.
Keywords
Introduction
The demolition robot is a kind of special engineering machinery. Generally, the demolition robot utilizes the electric motor or diesel engine to drive the hydraulic pump, which provides the power source for the hydraulic series joint manipulator and breaking actuator and adopts the manual operation of the hydraulic impactor to carry out the breaking and removing work in the working space. 1 Demolition robot has been widely used in the fields of architecture, metallurgy and mineral resources industry, nuclear industry, and rescue due to its functions of demolition and shearing in odious and complex conditions. In the above fields, the application of the demolition robot significantly improves the production efficiency, reduces the work intensity of the operators, and improves the safety of the personnel during the construction process. 2,3 However, as a general mechanical equipment, current demolition robot systems employ virtually no autonomy and programmed motion. Most systems employ simple remote control, teleoperation, or master–slave mode of manual operation to complete the task. In some applications, such as the dismantling of nuclear facilities, it is necessary to reduce the exposure and manual participation of operators in order to further improve the safety of staff. 4 In recent years, researchers have gradually carried out their improvement work in view of the shortcomings and new application requirements of the demolition robot. For example, Derlukiewicz et al. 5 and Derlukiewicz 6 designed an advanced humane machine interface to implement in remote-controlled robots for demolition works in order to avoid failures resulting from robot misuse. Corucci and Ruffaldi 7 carried out the research works of robot environment perception, task planning, and human–robot interaction paradigms for the indoor demolition robot.
In summary, because it is a large-scale engineering equipment, the research work of the intelligent demolition robot is just beginning. Adopting advanced robotic technology to improve the traditional demolition robot system and improve its autonomous working ability will become the research hotspot of demolition robot. Therefore, on the basis of designing and manufacturing the demolition robot system, we built an intelligent demolition robot experiment system (Figure 4). In the process of using a hydraulic hammer to complete the demolition work, the operator of the demolition robot first needs to control the motion of each joint hydraulic cylinder of the series manipulator by controlling the rocker, and gradually drives the end of the manipulator to the demolition object point. The positioning process of the end of the manipulator is a process of repeated adjustment by manual operation. In order to realize the robotization of the above manipulator positioning process and improve the positioning efficiency, we propose a self-positioning method of the demolition series manipulator based on three-dimensional laser ranging.
To actualize this laser-guided self-positioning method, we must first solve the problem of calculating and converting from the laser measurement data of the target point to the stroke of the joint hydraulic cylinder. This inverse calculation process includes the redundancy of the kinematics inverse solution and the conversion relation of laser measurement space to manipulator workspace obtained by measurement calibration. Because artificial neural network (ANN) has the advantages of nonlinear mapping, self-learning ability, and robustness, it is one of the effective engineering methods to solve the inverse solution of redundant manipulator. 8 –11 Therefore, we utilize ANN to build a global nonlinear mapping model of three-dimensional laser measurement space to four-dimensional manipulator joint hydraulic cylinder stroke space. In order to solve the problem of calculation and conversion of the laser measurement data of the target point to the stroke of the joint hydraulic cylinder, the weight optimization of this laser-guided global ANN should be further completed.
In robot and other engineering fields, there have been some applied neural network weight optimization methods. Daya et al. 11 applied the back propagation (BP) neural network to solve the inverse kinematics problem for robotics manipulators. Hasan et al. 12 used the BP neural network to solve the joint angular position and Jacobian matrix of degree of freedom (DOF) industrial robots. Moreover, Bingul et al. 13 applied the BP neural network to solve the inverse kinematics problem of 6-DOF industrial robots. Cai et al. 14 proposed a method for identifying the inverse kinematics of the spherical robot BHQ-1 based on the BP neural network. Ma et al. 15 used the BP neural network to compensate the pose error of a 6-DOF parallel robot. The optimization of the connection weights of the neural network is a hyperparameter optimization problem. Due to the nature-inspired algorithms like swarm intelligence, bio-inspired, physics/chemistry, and many more have helped in solving difficult problems, it is also used to solve the optimization of neural network to improve their performance. 16,17 Köker 18 combined the simulated annealing (SA) algorithm with the neural network to solve the inverse solution of PUMA560 and Stanford 6-DOF robots. Besides, Köker 19 used the combination of the genetic algorithm (GA) and the neural network to solve the inverse kinematics problem of the 6-DOF Stanford robot. Wang and Xu 20 adopted a genetic neural network to compensate the positioning error of the welding robot. Mukhopadhyay et al. 21 utilized a GA neural network for the optimization of process parameters for the production of Chhana cake. Lorencin et al. 22 presented a GA approach to design a multi-layer perceptron for combined cycle power plant power output estimation. Guanbin et al. 23 combined the particle swarm optimization (PSO) algorithm with the neural network for the kinematic parameter identification of industrial robots. Hasanipanah et al. 24 presented an ANN optimized by PSO for the prediction of maximum surface settlement. Nguyen et al. 25 optimized neural network with PSO for predicting short building seismic response. Goudos et al. 26 used an adaptive differential evolution (DE) neural network to predict the received signal strength of unmanned aerial vehicle (UAV) wireless communication.
The above researches have shown that ANN is an effective method to establish the global nonlinear mapping model. And in the above ANN algorithms, the commonly used BP neural network adopts gradient descent to guide the back propagation to optimize connection weights. There are some disadvantages, such as low learning efficiency, slow convergence speed, and easy to fall into local minimum. 27 Especially for the high-dimensional parameter space, the BP algorithm with a single starting point is difficult to find the global optimum. The SA belongs to a greedy algorithm that adds randomness, so its convergence speed is slow. As a classical evolutionary algorithm, GA also has some disadvantages, such as premature population, easy to fall into local optimum, and so on. 28 Although PSO is a successful stochastic optimization algorithm, it is also easy to fall into local extreme and causing it to be unable to find the better solution—global optimum. 29
By comparison, DE is a new evolutionary algorithm, which has the strong robustness to the optimization of high-dimensional real value parameter and simple parameter setting and has been proved by relevant studies to have stable global search ability. It has obvious advantages for the optimization of ANN weight set. 30 –33 Based on the adaptive global optimization capability of DE, we utilize it for the weight optimization of the laser-guided neural network of demolition robot. However, the contradiction between population exploration and exploitation still exists in the DE algorithm as well. 34 The gravitational search algorithm (GSA) is a new heuristic algorithm proposed by E. Rashedi in 2009, which has the mechanism of driving other individuals to the excellent individuals of the population by gravity and can adjust the convergence rate of the population based on the gravity constant value. In this article, the gravity mechanism provided by GSA is introduced into the differential variation operation of DE, and a gravitational search algorithm and differential evolution (GSADE) is proposed to realize the complementary advantages of DE and GSA. The GSADE enables DE population to obtain guidance information to move to excellent individuals, adaptively adjusts the position of differential variation basis vectors in the optimization space by using the gravitational mechanism of GSA, and basis vectors accelerate gradually to approach the excellent vector of the population, so as to complete the convergence control of DE evolutionary population and improve the convergence speed. The GSADE not only retains the adaptive global search ability of DE but compensates for the weak searching ability of GSA itself. 35
In this article, we first introduce a new laser-guided demolition robot system. The global mapping model of the laser-guided ANN is established to realize the autonomous positioning of the end of the manipulator. On this basis, a comparative study of GSADE algorithm in ANN weights optimization is carried out, and its convergence performance is analyzed. Finally, the output accuracy of the off-line optimized laser-guided global ANN is analyzed to prove its effectiveness in large hydraulic manipulator positioning applications.
Laser-guided demolition robot experiment system
As shown in Figure 1, the experimental system of laser-guided demolition robot is constructed by adding a three-dimensional laser ranging system and a computer control system to the rotary platform of the demolition robot. The onboard computer is the APAX-6572 embedded controller of ADVANTECH equipped with an analog signal collecting module. The three-dimensional laser ranging system designed and modified by us is an effective and simple engineering method to obtain the spatial information of the target point. The three-dimensional laser ranging system is constructed by MV6060 digital cloud platform and Germany LEUZE ODSL 30/D232 laser rangefinder. The pitch and horizontal rotation positioning accuracy of the cloud platform is 0.026°. The measuring distance of laser rangefinder can reach 30 m and the measuring accuracy is 2 mm. The demolition manipulator in Figure 1 has four joints, each of which is driven by a closed-loop controlled electro-hydraulic proportional valve control cylinder to meet the need for precision positioning of the manipulator end. Each joint cylinder is fitted with a displacement sensor that outputs a voltage signal proportional to the hydraulic cylinder stroke. The displacement sensor is the MB magnetostrictive sensor of American MTS, the output voltage is 0–5 V, and the displacement resolution can reach 0.1 mm. The output voltage signal of the displacement sensor provides the feedback signal for the position closed-loop control of the joint cylinder and provides the training data for the optimization of the neural network.

Laser-guided demolition robot experiment system.
Gravitational search algorithm and differential evolution (GSADE)
As a meta-heuristic algorithm, GSA uses gravity to transfer information between different particles and guides individuals move by properly adjusting gravity and inertia mass. 36,37 Evolutionary algorithm (including DE) has a good global search capability due to its randomness, but it is difficult to find a balance between exploration and exploitation, so the convergence accuracy is low. 38 In this section, the gravity mechanism of GSA is introduced into the differential variation operation of the DE algorithm to improve the balance of exploration and exploitation and the convergence ability of DE.
DE algorithm
The optimization process of DE algorithm is mainly realized by differential population initialization, differential variation, crossover and selection operators, and the specific operation is as follows.
Evolution individual coding and initialization
First, the operational object of the DE algorithm is the vector individual in continuous space. At moment t, the evolution population

In a continuous real value space, the 0-generation population (target vector) is randomly generated, and its initialization is as given in the following equation

where bL and bU are the boundary values of continuous space.
Differential variation operator
The adaptive global search of DE is implemented by its variation operator. The differential variation takes a certain proportion of the difference information as an individual perturbation, which makes the algorithm to be adaptive in jump distance and search direction and plays a leading role in the search optimization of the population. 39
Standard DE variation operation adds a scalable and randomly selected differential vector component to a random basis vector

The differential variation operation.
The differential variation operation is given by the following equation

where i, r0, r1, and r2 are evolutionary individual indices and
Crossover operator
The cross operation increases population diversity. Based on the variation vector generated by equation (3), this operation generates the test vector

where crossover rate Cr is the real number and set between 0.9 and 1.
Mending operator
The mending operation is used for vector individual constraints.

Selection operator
The selection operator is based on one-to-one greedy selection mechanism.

where the
Gravitational and differential variation operator
By combining the gravity mechanism of GSA with the differential variation operator, a gravitational and differential variation operator is constructed, and its concrete principle is introduced in the following subsection.
Effect of variation basis vector on population convergence
The performance of DE algorithm is mainly determined by the factors such as its evolution strategy and control parameters 39 and so on. Based on the different ways of variation and crossover, DE’s evolution strategy is interpreted in the form of DE/x/y/z: x presents the selection mode of basis vector in variation operation, y presents the number of differential vectors involved in variation, and z presents the crossover model such as the index crossover (bin). DE/rand/1/bin and DE/best/1/bin are two DE strategies with different variation basis vectors. The former is the basic version of the standard DE algorithm, and the latter is an evolutionary strategy proposed to improve the convergence rate of DE. DE/best/1/bin changes the random variation basis vector in equation (3) to the current optimal vector of the evolutionary population as the basis vector. The two evolutionary strategies have significant effects on the convergence of evolutionary populations, in which the rand basis vector is beneficial to maintain the diversity of the population, but the convergence rate is slow. Under the same Np , DE/best/1/bin usually accelerates the convergence speed of the population and reduces the possibility of stagnation, but it is easy to converge locally and reduce the success probability of the algorithm. 34,40
Therefore, by controlling the relative position between the variation basis vector and the best vector in the optimization space, the DE population search process can be effectively controlled and the convergence speed can be adjusted. The GSA provides a position adjustment mechanism that controls the population of individuals to gradually accelerate their approach to excellent individuals in the optimization space, so a new gravitational and differential variation operator is proposed by applying gravity to differential variation operator.
The basic principle of GSA
GSA is not only simple in structure but also provides a proper balance between exploration and exploitation capabilities and has good convergence ability. By calculating the gravitation value between each particle and all other particles, GSA obtains the gravitation of the particle, then obtains the acceleration, and updates the speed and position.
41
The basic principle of gravitational operation for optimization particles is shown in Figure 3. In the DE process of each generation, based on the fitness value of each differential evolutionary individual

The basic principle of gravitational operation.
The specific operation of the GSA consists of the following operators.
1. Particle inertia mass calculation
The inertial mass


where i = 1, 2,…, Np
, Np
is the population size;


2. Calculation of gravity
Calculate the mutual gravity of each particle in each dimension space, and calculate the gravity between particle i and particle j in the d-dimension space, as given in the following equation

where

The gravitational constant G is a function of the initial value G 0 and time t, and gradually decreases with time, see the following equation

The resultant force of GSA on particle i in the d-dimension is the random weighted sum of the d-component of the force exerted by other particles, as given in the following equation

where
GSA controls the exploration and exploitation by the parameter K best in equation (13). Kbest is a function of time, and the initial value is k 0 = Np , which means that all particles apply force at the beginning. The K best drops linearly, and only one particle exerts force on other particles finally.

3. Acceleration of particles
According to Newton’s law of motion, at moment t and in the d-dimension direction, the acceleration of particle i is

4. Movement of particles
For differential evolutionary individual
First, the velocity that each particle already has in the d-dimensional is

where
At a specific time t, based on the DE of individual

Keep the velocity state

Principle of gravitational and differential variation operator
It can be seen from equation (16), there are two parallel populations

The gravitational and differential variation operation.
The gravitational and differential variation operator refers to the following equation

where
It can be seen from equation (18) that the differential perturbation is generated based on
GSADE algorithm process
The basic differential variation (equation (3)) is replaced by the gravitational and differential variation (equation (18)), and the specific process of the GSADE is as follows.
Step 1: Set the maximum number of iterations T
max. Equation (2) randomly generates the initial population, which is composed of Np
target vectors xi
(t). The number of iterations t is initialized to 0.
Step 2: The fitness value fit(xi
(t)) of the target vector is calculated and the optimal individual x
best(t) of the evolutionary population is selected.
Step 3: If the fitness value of the optimal individual x
best(t) of the evolutionary population meets the accuracy requirement or t = T
max, the iteration is finished. The optimal individual x
best(t) is output as the optimization result, and the optimization ends. Otherwise, the optimization calculation steps from Step 4 to Step 8 are completed.
Step 4: Calculate inertial mass Mi
(t) of xi
(t) based on equation (8).
Step 5: Equations (9) and (12) are used to calculate the resultant force
Step 6: The moving speed
Step 7: Taking
Step 8: Equation (4) is used to generate test vector ui
(t) and calculate the fitness value fit(ui
(t)) of test vector. Then equation (6) is used to generate a new generation of evolutionary individuals xi
(t+1). The number of iterations variable t increases by 1, and then goes back to Step 2.
Algorithm simulation research of the GSADE neural network
On the basis of establishing the mapping model of inverse calculation ANN of laser-guided demolition robot, the GSADE algorithm proposed in this article is used to optimize the weights of inverse calculation ANN by using the training data collected by the experimental system of demolition robot.
Relationship between three-dimensional laser ranging system and hydraulic series manipulator
The positional relationship between the laser ranging system and the series manipulator is shown in Figure 5.

The position relation between the laser ranging system and the series manipulator.
Each joint of the 4-DOF series manipulator of the demolition robot is driven by a hydraulic cylinder, that is to say, four hydraulic cylinders constitute a four-dimensional joint cylinder stroke space. The positive kinematics of the hydraulic manipulator is the nonlinear mapping of the cylinder stroke space L
4 to the operating space W
2. That is, a cylinder stroke vector
It can be seen from Figure 5 that when the end of the manipulator is located at the position pk determined by a stroke vector lk of joint hydraulic cylinder, the laser ranging beam can be emitted to the end point of the manipulator by adjusting the horizontal rotation and pitch motion of the cloud platform. Thus, a stroke vector lk of joint hydraulic cylinder corresponds to a three-dimensional vector mk of laser measuring space M 3. That is, the cylinder stroke space L 4 and laser measuring space M 3 map each other.
Therefore, the inverse calculation problem of the laser-guided demolition robot can be solved by obtaining the mapping model of the laser measurement space M 3 to the stroke space L 4 of the joint hydraulic cylinder.
Inverse calculation neural network modeling of laser-guided demolition robot
In robot engineering, the neural network is an effective engineering method to establish a nonlinear mapping model. For instance, Mao and Hsia 10 acquired a very satisfactory inverse kinematic solution of a four-link planar robot that was simulated using a multilayer feedforward network with hidden units having sigmoidal functions and output units having linear functions. In this article, a feedforward neural network mapping model is established to simplify the inverse calculation process and solve the inverse calculation problem of laser-guided demolition robots. This laser-guided neural network is a global nonlinear mapping model of three-dimensional laser measurement space M 3 to four-dimensional manipulator joint hydraulic cylinder stroke space L 4 (see Figure 6).
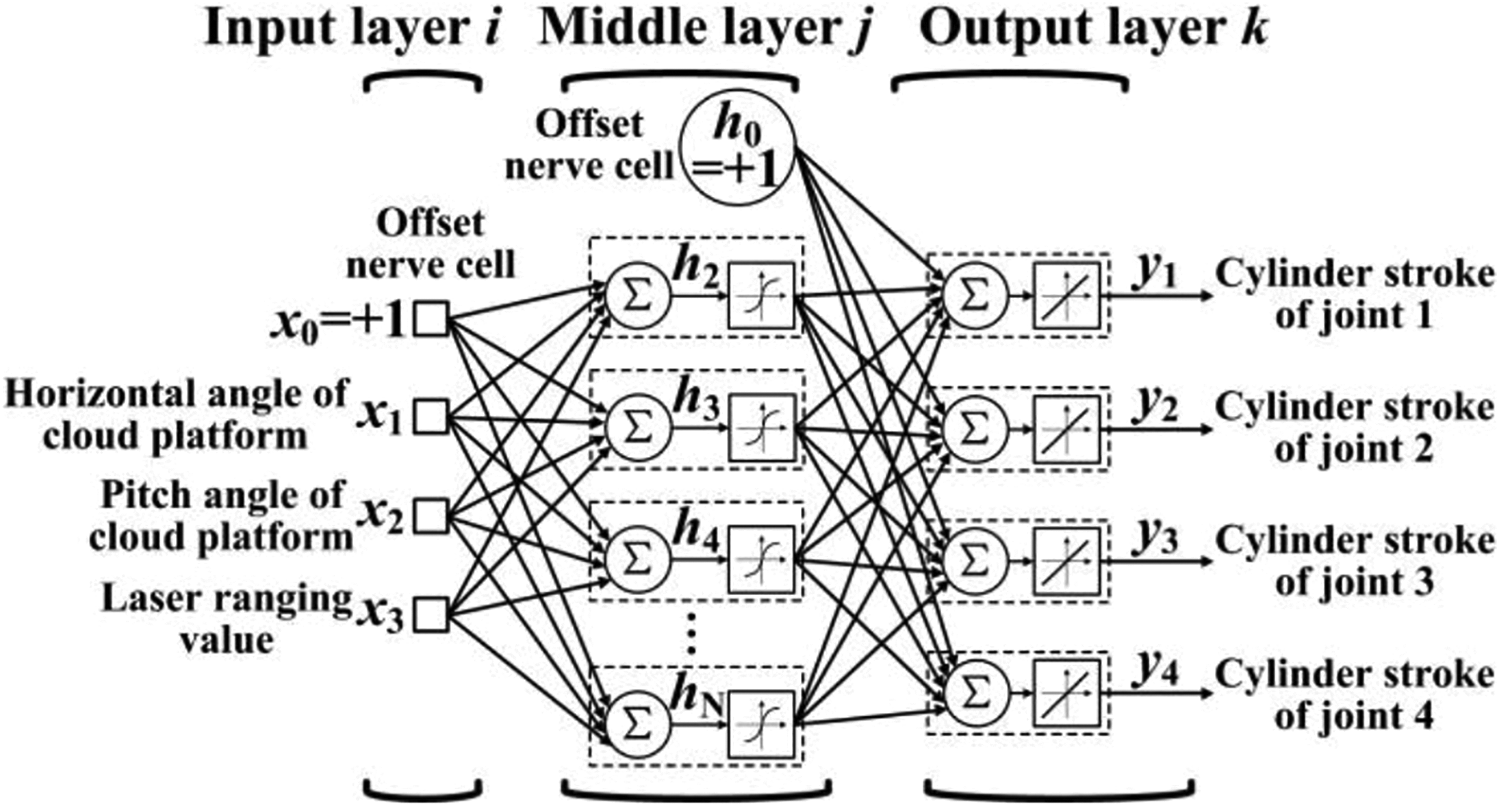
Inverse calculation mapping model of laser-guided demolition robot.
Figure 6 shows the inverse calculation feedforward neural network of the laser-guided demolition robot. The input layer is the three-dimensional laser measurement data, including the laser ranging value, horizontal rotation angle and pitching angle of cloud platform, and the output layer is the four-dimensional stroke value of four joint hydraulic cylinders.
As can be seen from Figure 7, the space of DE is the weight space of the inverse calculation ANN, and the connection weights of the inverse calculation ANN is real coded as the vector individual xi of the DE space. Each evolution individual xi represents an inverse calculation ANN with the same structure but different connection weights. The satisfactory evolutionary individual xi is searched by the GSADE algorithm to obtain the laser-guided ANN to meet the requirements of the robot manipulator positioning. In this article, based on the algorithm experiment, the number of neurons in the middle layer of the inverse calculation ANN is set to 16.

Encoding and decoding of neural network weights.
Inverse calculation neural network training sample and evolutionary individual fitness value
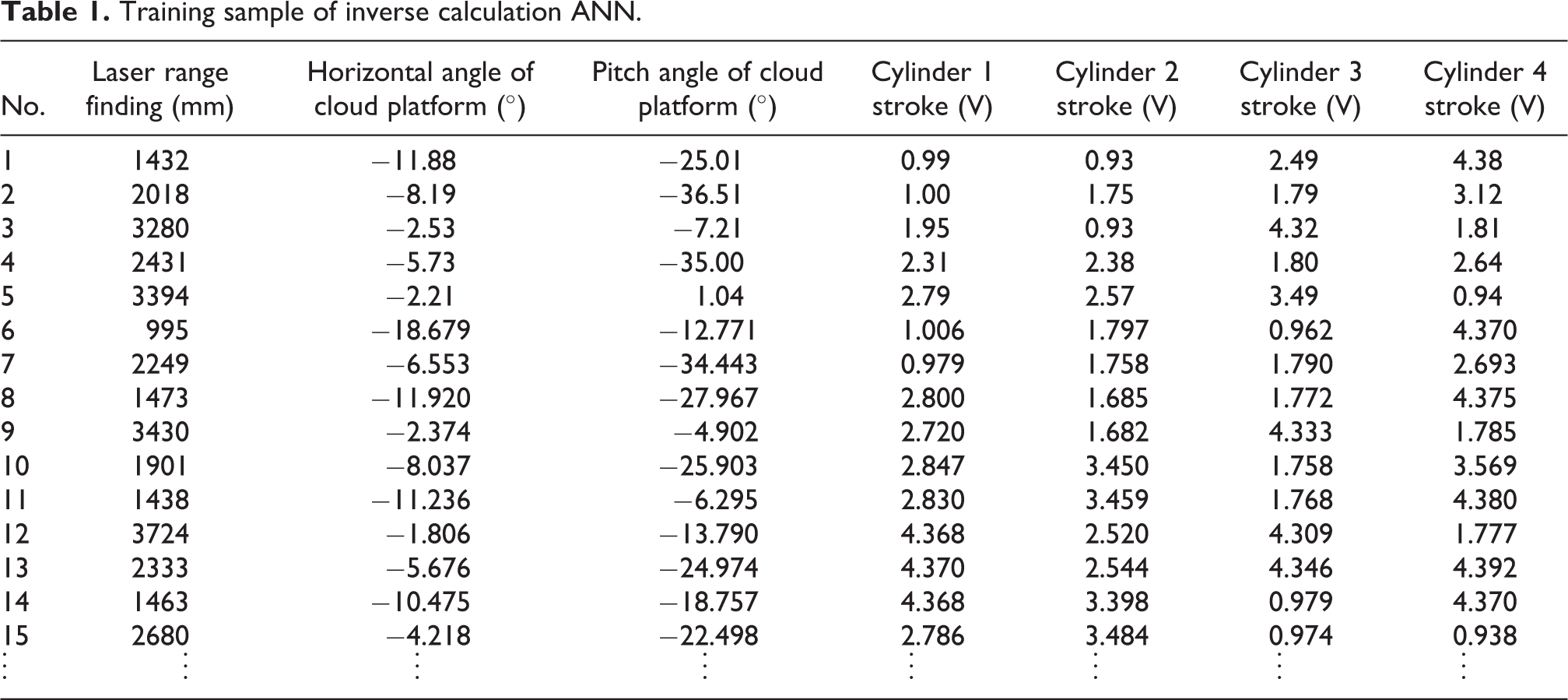
The neural network training data are acquired by the onboard data collection system and sensors of the robot. The measurement of each set of data is shown in Figure 5. Data samples are given in Table 1, and a four-dimensional cylinder stroke voltage value vector lk corresponds to a three-dimensional laser measurement value vector mk . We collected a total of 450 sets of data in the working plane of the manipulator for the training of the laser-guided ANN.
Training sample of inverse calculation ANN.
The intelligent algorithm optimizes the inverse calculation ANN, and the individual fitness adopts the average error energy of the sample output from the neural network forward propagation, as given in equation (19). The smaller the fitness value is, the higher the calculation accuracy of the neural network is.

where Q is the number of training samples, lk is the stoke vector of joint cylinder of the sample, and ak is the output vector of the neural network.
GSADE optimization simulation of inverse calculation neural network
The DE/rand/1/bin strategy of the standard DE and the DE/best/1/bin evolutionary strategy proposed to improve the convergence speed of the standard DE are respectively referred to as DE_RAND and DE_BEST algorithm, and the new GSADE algorithm, GSA algorithm, PSO, and GA algorithm are respectively used for the optimization of the inverse calculation ANN of redundant manipulator. The results show that GSADE significantly improves the convergence rate of the standard DE in neural network optimization, and the algorithm has a good stability, and the output precision of the GSADE neural network meets the inverse calculation requirements of engineering robot.
Influence of gravitational value G 0 on the convergence of DE population
GSA algorithm can control the gravity by setting the initial value of the gravity constant, G 0 (equation (11)). Meanwhile, the average distance between the individual and the population center of gravity at time t in the process of population evolution can reflect the population convergence state, as given in equation (20).
Therefore, by setting different gravity constant G 0 and comparing the average distance change curve of evolutionary population, we can prove the effectiveness of gravity on the convergence regulation of DE population. The comparison of the average distance variation curve is shown in Figure 8.

where

Comparison of population average distance variation.
As can be seen from Figure 8, DE_RAND has the problem of too slow population convergence in high-dimensional continuous space. In comparison, the population of DE_BEST algorithm has a fast convergence speed. However, the convergence speed of DE_BEST algorithm is too fast in the early stage of evolution, which is not conducive to the exploration of optimization space by the population, and is easy to cause local convergence. In order to improve the convergence speed of the standard DE, the gravity effect was added to DE_RAND to form a new GSADE. By comparing the decline curve in Figure 8, it can be found that the larger the initial value of the gravitational constant G 0, the faster the average distance of the population declines, indicating that the size of the gravity is proportional to the convergence speed of the population, which can effectively control the convergence process of the differential evolutionary population. Among them, when G 0 = 1000, the average distance decline speed of the population is close to DE_BEST. Therefore, in order to ensure the global search of the optimization space in the early stage of the population, the value of the G 0 is not as large as the best. By contrast, when G 0 = 750, GSADE slows down the convergence speed in the early stage of the population, which can guarantee the exploration ability of the algorithm in the early stage, while the convergence speed is equal to DE_BEST in the late stage of evolution, and it also realizes the purpose of strengthening exploitation in the late stage of evolution. In addition, due to the constraint effect of gravity, GSADE improved the population oscillation of DE_BEST in the late evolutionary stage, which further improved the convergence performance of the algorithm. Therefore, GASDE can not only improve the convergence speed of standard DE but also avoid local optimum by setting an appropriate gravitational constant value.
Comparison of optimization process of inverse calculation ANN
Different algorithms were applied to the optimization of inverse calculation neural networks. Under the condition that the population size was set at 300, the convergence performance of fitness values of the algorithms was compared through iterative comparison of fitness values, as shown in Figure 9.

Comparison of fitness iteration.
Figure 9 shows that in the optimization of inverse calculation ANN, the fitness of PSO and GA decreases the slowest, while the fitness of GSA and DE_BEST decreases the fastest, which indicates that the two algorithms have good convergence performance. Although the fitness of DE_RAND without gravity guidance decreased faster than that of PSO and GA, it was significantly slower than that of GSA and DE_BEST. Based on the analysis of Figure 8, we have known that, compared with the smaller gravitational constant (G 0 = 500) and the larger gravitational constant (G 0 = 1000), when the gravitational constant G 0 = 750, the evolutionary population can obtain a more appropriate convergence speed. Compared with the GSADE algorithm with gravitational action (G 0 = 750), the fitness of GSADE decreases significantly faster than that of DE_RAND without gravitational action, and the fitness of GSADE decreases close to GSA and DE_BEST, which indicates that the gravitational mechanism can obviously improve the convergence ability of DE_RAND. However, if the fitness of the algorithm drops too quickly, the probability of local convergence will be improved. By setting the appropriate gravity constant, the convergence speed of GSADE can be slower than that of DE_BEST, but significantly faster than that of DE_RAND, so that the exploration and exploitation of DE has a better balance, which not only improves the convergence speed of standard DE but also has a better global search ability than DE_BEST, and finds a better satisfactory solution.
Comparison of optimization precision and stability of neural network
In order to prove the stability and accuracy of GSADE in neural network optimization, the population size of different algorithms is set to 300, each optimization iteration is 6000 times, and each algorithm is repeatedly optimized for 30 times. The results are compared in Table 2.
Comparison of fitness results.
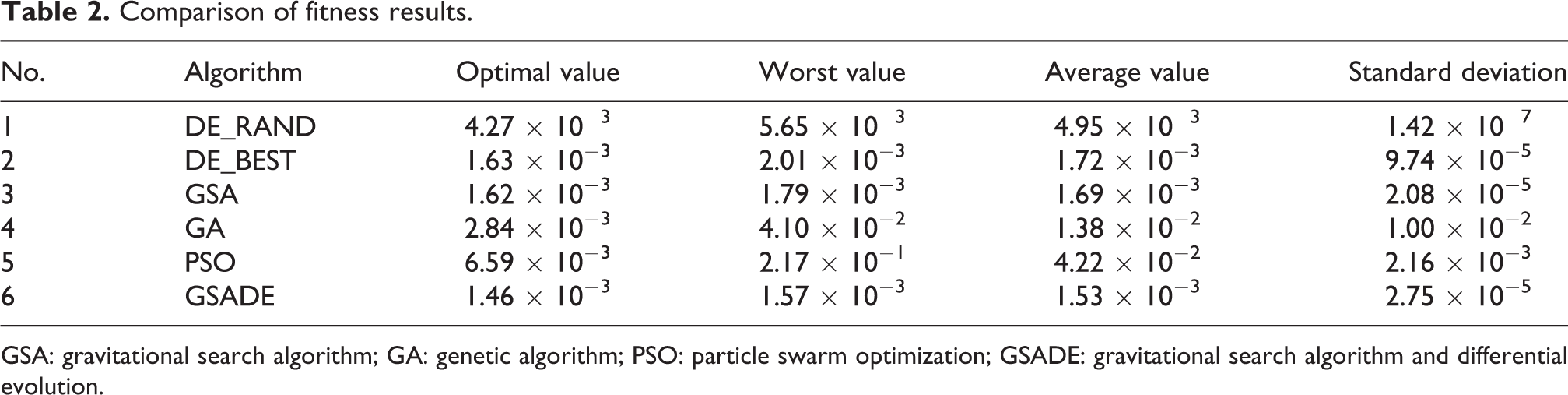
GSA: gravitational search algorithm; GA: genetic algorithm; PSO: particle swarm optimization; GSADE: gravitational search algorithm and differential evolution.
According to Table 2, the average and standard deviation of GA and PSO are poor. According to the standard deviation of DE_RAND, the optimizing stability is the best, but due to the lack of convergence ability, the optimization accuracy is insufficient in the limited number of iterations. By comparing the algorithms of DE_BEST and GSA, the optimization accuracy of the two algorithms is basically the same, but the comparison of standard deviation shows that the GSA algorithm is significantly more stable. Compared with the above algorithms, the optimal value, average value, and standard deviation of GSADE are the smallest, which significantly improves the optimization accuracy of standard DE and has better optimizing stability.
Analysis of inverse calculation results of laser-guided demolition robot
Based on the comparison of the above algorithm research, it is proved that the GSADE algorithm proposed in this article has good convergence ability and optimizing stability in the neural network weight optimization. We continue to analyze whether the accuracy of the output solution of the inverse calculation ANN optimized by GSADE meets the engineering requirements of the laser-guided positioning of the demolition manipulator.
In the off-line optimization of the inverse calculation ANN, the number of neurons in the middle layer of the ANN is set to 16, the evolutionary population size of GSADE was set at 300, the gravitational constant G 0 was set as 750, and the maximum number of iterations was set as 6000. The total number of training samples is 450 sets, as given in Table 1.
After off-line training of inverse calculation ANN model of laser-guided demolition robot, verification samples were collected through the experiment platform, and the 150 sets of verification samples were the same as the examples in Table 1. The input vector mk (laser measurement vector) of a set of verification samples is input into the neural network model, and the corresponding calculated value ak of four-dimensional joint cylinder stroke can be obtained. First, compare the measured value lk of the joint cylinder stroke of each set of verification samples with the calculated value ak , and comparison examples are given in Table 3.
Comparison of the stroke value of joint cylinder of verification sample between calculated and measured values.

It can be seen from Table 4 that for 150 sets of verification samples, the average difference between the measured value and the calculated value of the four joint cylinders is 2.76, 3.46, 2.43, and 1.02 mm, respectively. Demolition robot as a heavy equipment, this calculation accuracy is to meet the engineering requirements.
The average value of the calculated difference value of the joint cylinder of the verification samples.

In terms of the self-positioning of the manipulator, we are more concerned about whether the end position of the manipulator determined by the calculated value of the joint cylinder based on the output of the neural network meets the requirements. Based on the forward kinematics of the hydraulic series manipulator, a cylinder stroke vector

The schematic diagram of calculation difference of the manipulator end position.
See Figure 11 for the calculation difference of the end position of the manipulator of the 150 verification samples.
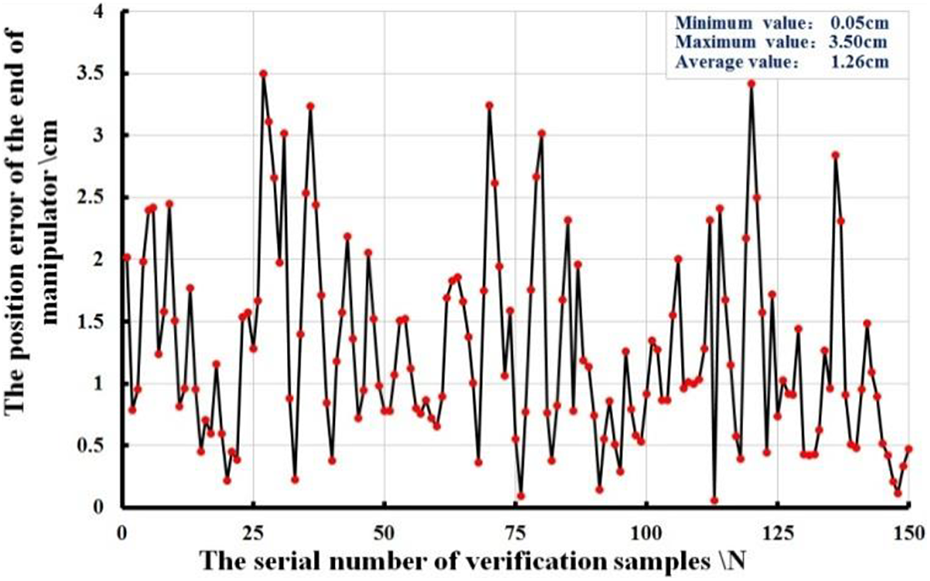
The position error of the end of manipulator.
It can be seen from Figure 11 that the average value of the calculated difference of the end position of the manipulator of the validation sample is 1.26 cm. As a kind of construction machinery, the drill rod diameter of the end hydraulic hammer is 2 cm (see Figure 12). The series manipulator of the demolition robot is mainly used in engineering construction and heavy industry production. Therefore, based on the established laser-guided global inverse calculation ANN mapping model, and using GSADE off-line optimization to obtain the inverse calculation neural network, the calculation accuracy can well meet the calculation requirements of precise positioning of large manipulator in practical engineering applications.

The breaking hydraulic hammer.
Conclusion
The GSADE introduces the gravity mechanism into the differential mutation operation, which realizes the purpose of controlling the convergence rate of the DE population by gravity. The simple setting of GSADE parameters and the proper gravity constant G 0 can balance the exploration and exploitation of the DE population, significantly improve the convergence speed and optimization accuracy of standard DE, and maintain the stability of the algorithm. The research work of this article has shown that the gravitational effect of GSA can effectively improve the convergence speed of DE algorithm. Besides, the research work of combining GSA with other intelligent algorithms to improve the optimizing performance of the algorithm is also worth carrying out.
As a new optimization algorithm, GSA has the advantages of simple structure and fast convergence speed. In robot engineering, the research of GSA in the real-time solution of inverse kinematics and parameter optimization of controller is worth developing.
The construction of laser-guided demolition robot system provides a basic platform for the future research of the intelligent demolition robot. Based on the global mapping model of ANN optimized by the GSADE algorithm, we obtain an effective solution of inverse calculation for the laser-guided demolition robot, and the accuracy of the solution can meet the requirements of the end positioning of the manipulator used for demolition work. Robotization of engineering machinery equipment is a research work being carried out by many researchers. The inverse calculation method of large hydraulic manipulator based on the neural network mapping model can provide a useful reference for the calculation of manipulator positioning control of other equipment. In addition, this article has proved the feasibility of the proposed global laser-guided neural network, and we will also propose a local optimization algorithm to achieve higher accuracy.
The research content of this article is the first step to realize the autonomous work of the demolition robot. The follow-up research work will focus on a new method to measure breaking objects, position closed-loop controller of joint, the demolition planning, and autonomous attack of demolition objects. In addition, we are developing a special demolition robot for nuclear waste disposal.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Major Special Project of Science and Technology in Anhui Province (201903a05020029), Anhui University Natural Science Research Project (KJ2017A049), and Science and Technology Major Project of Anhui Province (17030901037).