
Abstract
This article addresses the design of adaptive target tracking control for an underactuated autonomous underwater vehicle subject to uncertain dynamics and external disturbances induced by ocean current. Firstly, based on the line-of-sight method, the moving target tracking guidance strategy is designed, and the target tracking reference speed and reference angular velocity are given. According to the obtained reference speed and reference angular velocities, the reference control quantity is differentiated and filtered based on dynamic surface control. The target tracking controller is designed based on radial basis function neural network and nonsingular terminal sliding mode control and adaptive techniques. Lyapunov stability principle is utilized to ensure the asymptotic stability of the target tracking controller. Simulation of target tracking is carried out to illustrate the effectiveness of the proposed controller.
Keywords
Introduction
Autonomous underwater vehicles (AUVs) have been widely studied due to the potential civil and military application values. 1 –3 As a key technology of AUV, target tracking control is very important to the task, such as underwater target reconnaissance and surveillance, intelligence collection, port defense, time-sensitive strike, underwater docking recovery, submarine pipeline maintenance, and halobios observation. 4,5 Tracking an undersea moving object is frequently encountered in the unmanned underwater vehicle (UUV) applications, such as tracking a submarine. To achieve this, the UUV needs to follow the target in certain distance based on the sensor information. 6
In recent years, there have been a number of significant robust control methods developed for tracking control, such as adaptive control, 7 fuzzy logic control, 8 backstepping control, 9 and neural network (NN) method. 10 A novel Lyapunov-based model predictive control framework was developed to improve the trajectory tracking performance by online optimization. 11 An extended state observer is developed to estimate uncertainty induced by model dynamics and external disturbance in path-following task, where the controller is designed based on output-feedback methods. 12
In practice condition, the AUVs kinematic and dynamic models are highly nonlinear and coupled, and most of the hydrodynamic parameters cannot be obtained or measured inaccurately, and there exist unknown and time-varying disturbances in actual ocean environment. 13 For tackling the challenges mentioned previously, researchers have proposed various control methods.
Adaptive control is an effective method to deal with uncertainties, with little or no information of the bounds. Some output-feedback adaptive control approaches 14 –19 are proposed for underactuated AUVs. However, there is heavy calculation for higher order systems of these adaptive control approaches and they just compensate for constant and slowly varying parameters, which does not adapt to the complex actual condition. Hence, some robust adaptive technique, such as sliding mode control, is developed to attenuate the effects of external disturbances.
Bessa et al. propose a sliding mode control strategy mainly based on approach for remotely operated vehicle (ROV) depth regulation to cope with the external disturbances and uncertain model parameters. 20 Matveev et al. propose a sliding mode-based navigation and guidance method to solve the problems of a unicycle-like robot passing through an environment with moving and deforming obstacles. 21 In the problem of translational robotic systems trajectory tracking, sliding mode control is employed to reduce tracking errors dramatically and compensate implications of initial error, varying loading conditions, model uncertainties, and environmental disturbance. 22
Liang et al. combine fuzzy logic theory with sliding mode methods to solve the problems of uncertain dynamics and external disturbances for underactuated AUV path following 23 and trajectory tracking, 24 and multiple underactuated unmanned surface vehicle (USV) path following. 25,26
Joe et al. propose a second-order sliding mode control to stabilize an AUV in trajectory tracking with the unpredictable disturbance induced by waves and currents. 27 Wang et al. propose a backstepping sliding mode controller based on a slow time-varying adaptive disturbance observer (BSMCSTADO) to compensate for interferences caused by wall effect during near-wall following task. 28 Qiao and Zhang propose an adaptive nonsingular integral terminal sliding mode control scheme, which does not require the bound information of the system uncertainty, however, the control just effective for first-order uncertain nonlinear dynamic system. 29 Elmokadem et al. propose a robust control scheme using terminal sliding mode control to solve the horizontal plane trajectory tracking problem of underactuated AUV, which is effective for bounded disturbances. 30 A terminal sliding mode controller is designed to improve the performance of trajectory tracking control and accelerate the converging rate, where an extended disturbance observer is employed to estimate current-induced uncertainties and an anti-windup technique is applied to weaken the influence of actuator saturation. 31
For solving the coordinated tracking problem of multi-AUVs with time-varying trajectory, a predictor-based neural dynamic surface controller is designed, where the predictor is utilized to recover the unmeasured velocities and identify the vehicle dynamics with little information of models. 32 An adaptive NN controller is designed to deal with uncertainties of AUV induced by time-varying hydrodynamic damps, where the radial basis function (RBF) NN is utilized to estimate the unknown terms and adaptive law is introduced to optimize the estimation of the weight of NN. 33 A neural adaptive controller is designed to deal with the unknown hydrodynamic parameters and time-varying environmental disturbances, and saturation functions are employed to compensate actuators’ saturation nonlinearity. 34 A target tracking controller for AUV in 3-D space is designed, where NN and adaptive control are employed to deal with the problem of lacking prior information of vehicle dynamic model and external disturbances, and computational complexities are reduced by dynamic surface control approach. 35
In this article, main contributions can be summarized as follows:
A target tracking methodology based on line-of-sight is proposed to obtain the reference velocities, and the kinematic stability is proved.
Dynamic surface control is employed to obtain the differential value of the reference velocities, and differential explosion problem is solved via command filtering by DSC approach.
For enhancing the robustness of an underactuated AUV against unknown model parameters and external disturbances, nonsingular terminal sliding mode control and RBF NN are employed to develop a target tracking controller, which ensures target tracking control converging fast and avoids buffeting problem of slide mode control.
Problem statement
AUV model
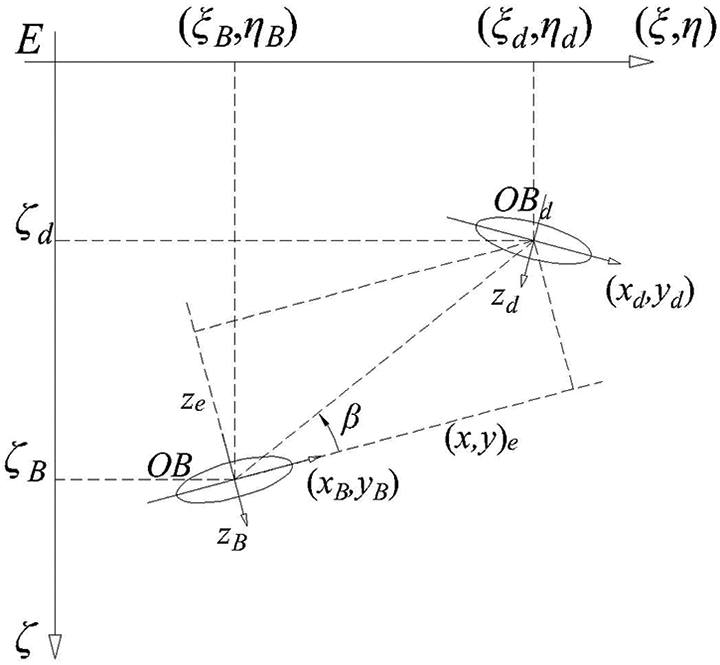
There are two commonly used coordinate systems to describe the motion of an AUV, as shown in Figure 1. One is inertial reference coordinate system {

Coordinate system.
The kinematic model of the AUV in the 3-D space can be described as follows 13

Here
The AUV considered in this article is assumed to be neutrally buoyant. Then, based on the momentum theorem and ignoring the rolling motion, the AUV’s dynamic model in the 3-D space is expressed as follows 13

where


where m is the mass of the AUV, Iy
and Iz
are the moment of inertia about the y and z axes.
Control objectives
To describe the target tracking control problem, we introduce three tracking variables, δ represents the distance between the AUV and the target, β and α represent bearing angles that the target relative to the AUV, as shown in Figures 2 and 3. In this article, we assume that these three variables can be measured by sensors equipped on the AUV.

Horizontal plane projection of AUV tracking a target based on range and angle measurements. AUV: autonomous underwater vehicle.
Vertical plane projection of AUV tracking a target based on range and angle measurements. AUV: autonomous underwater vehicle.
Therefore, the control objectives of this article are that we shall design control inputs τu , τ q, and τ r to force the AUV to asymptotically track the target with all tracking variables converging to a neighborhood of zero and the controller should be with robustness against to uncertainties of model dynamics and unknown environmental disturbances. For avoiding collision with the target, a save distance between the AUV and the target is necessary, then, a positive threshold value δ 0 is introduced, and the control objective is changed as designing a controller to render tracking variables (δ−δ 0), β and α converge to a neighborhood of zero.
Controller design
Kinematic controller design
The position error between the follower AUV and target in {
where (ξB
,ηB
,ζB
) and (ξd
,ηd
,ζd
) are the positions of the AUV and the target, respectively, in {
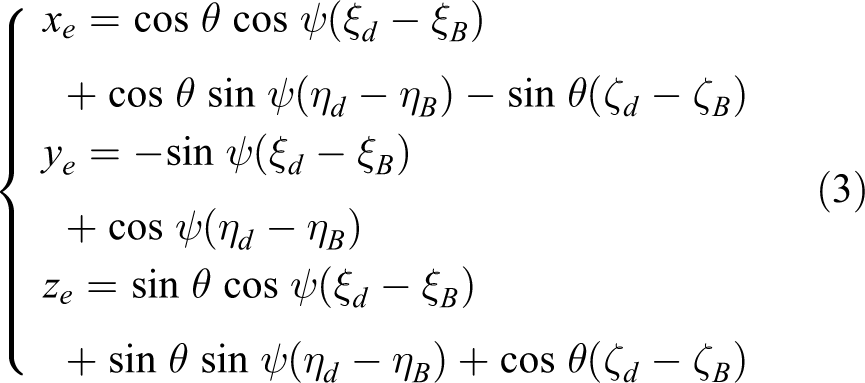
Hence, the tracking variables δ, β, and α are related to Cartesian errors xe
, ye
, and ze
in {
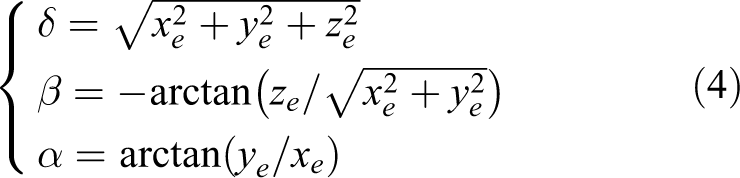
and

Differentiating equation (3) yields the following error dynamics in {

where

Then, the dynamics of tracking errors xe , ye and ze can be transformed to the range and bearing angles dynamics by differentiating equation (4).
By differentiating δ in equation (4), one obtains

Substituting for xe
and

Let

where
By differentiating
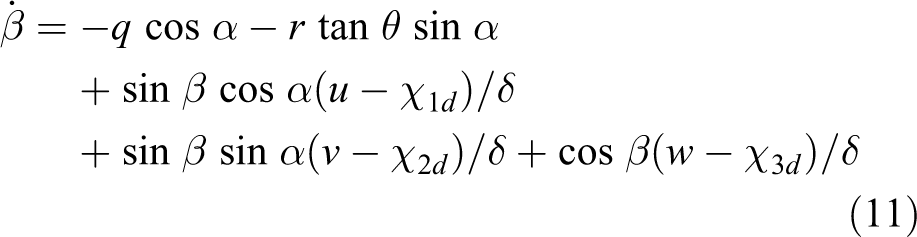
Let

where
By differentiating

Let

where
A Lyapunov function is chosen as follows

Differentiating equation (15) yields

According to the chosen virtual control law, equation (16) can be written as follows

Consequently, the parameters
Dynamic controller design
To avoid the computation complexity, virtual control laws uc , qc , and rc are passed through the following first-order filter 36



where
and the following error equations are obtained from equation (2)

where

Choosing the following integral sliding mode surface

where
Differentiating equation (24) and utilizing equation (22) yields

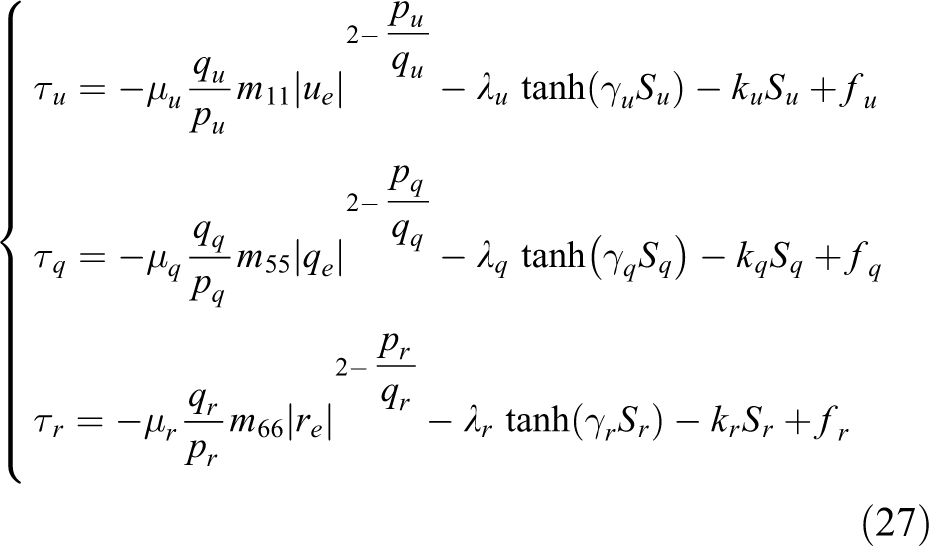
For improving convergence speed and dynamic response rate, a fast terminal reaching law 37 is employed as follows

where
The control input can be selected as
Consider the following Lyapunov function:

Differentiating equation (28) and substituting equation (27) into equation (25) yield


To satisfy the sliding condition with minimum control effort,

where
Since

where

where γλi > 0, γ ki > 0, i = u, q, r are design parameters.
Hence, according to equation (29), can be expressed as follows:

Using equation (31), equation (33) can be written as follows

Substituting for λ i and ki from equation (30) yields

Using the properties of trace, if

then

Since the nonlinear dynamics
For an arbitrary continuous function

where

where
According to the RBFNN approximation above, equation (23) can be written as follows:

Let

and

where
Choosing a Lyapunov function

Differentiating equation (43), and substituting equation (41) into equation (25),

Using equations (31) and (42), equation (44) can be written as follows:

Substituting equations (30), (36), and (40) into equation (45) yields

Using the properties of trace, if

where

then
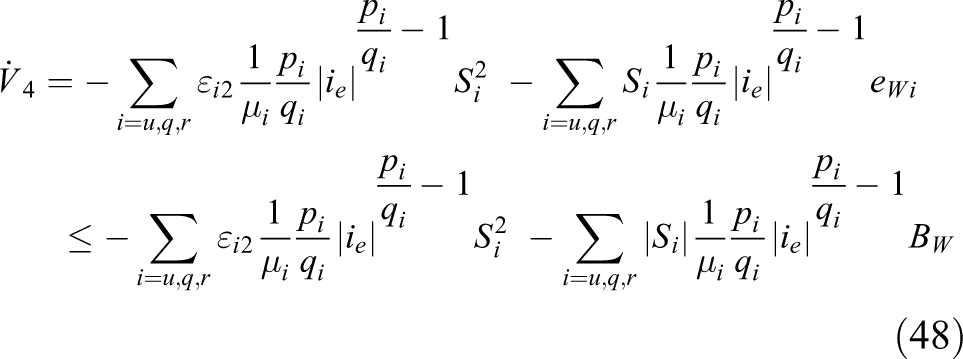
Since
Simulation results
To verify the effectiveness and robustness of the proposed target tracking controller, numerical simulations are carried out with an AUV named WL-4, as shown in Figure 4. The AUV is drived by a stern thruster and manipulated by elevators and rudders arranged in a cross. Parameters of the AUV are provided in Table 1.

The WL-4 AUV. AUV: autonomous underwater vehicle.
Parameters of the WL-4 AUV.

AUV: autonomous underwater vehicle.
The other dynamic parameters of the AUV are assumed to be unknown completely. Ocean environmental disturbances are assumed to be steady ocean current, and the velocity is
In this simulation, controller parameters are set to
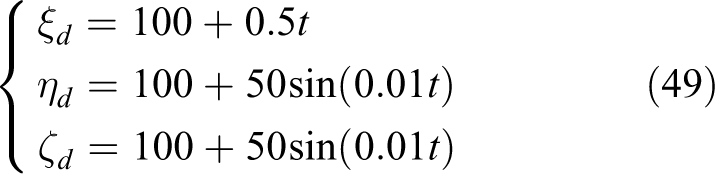
Simulation results are shown in Figures 5 to 10, which shows that AUV successfully track the target with a distance of δ 0 = 4 m in the presence of model uncertainties and ocean disturbance.
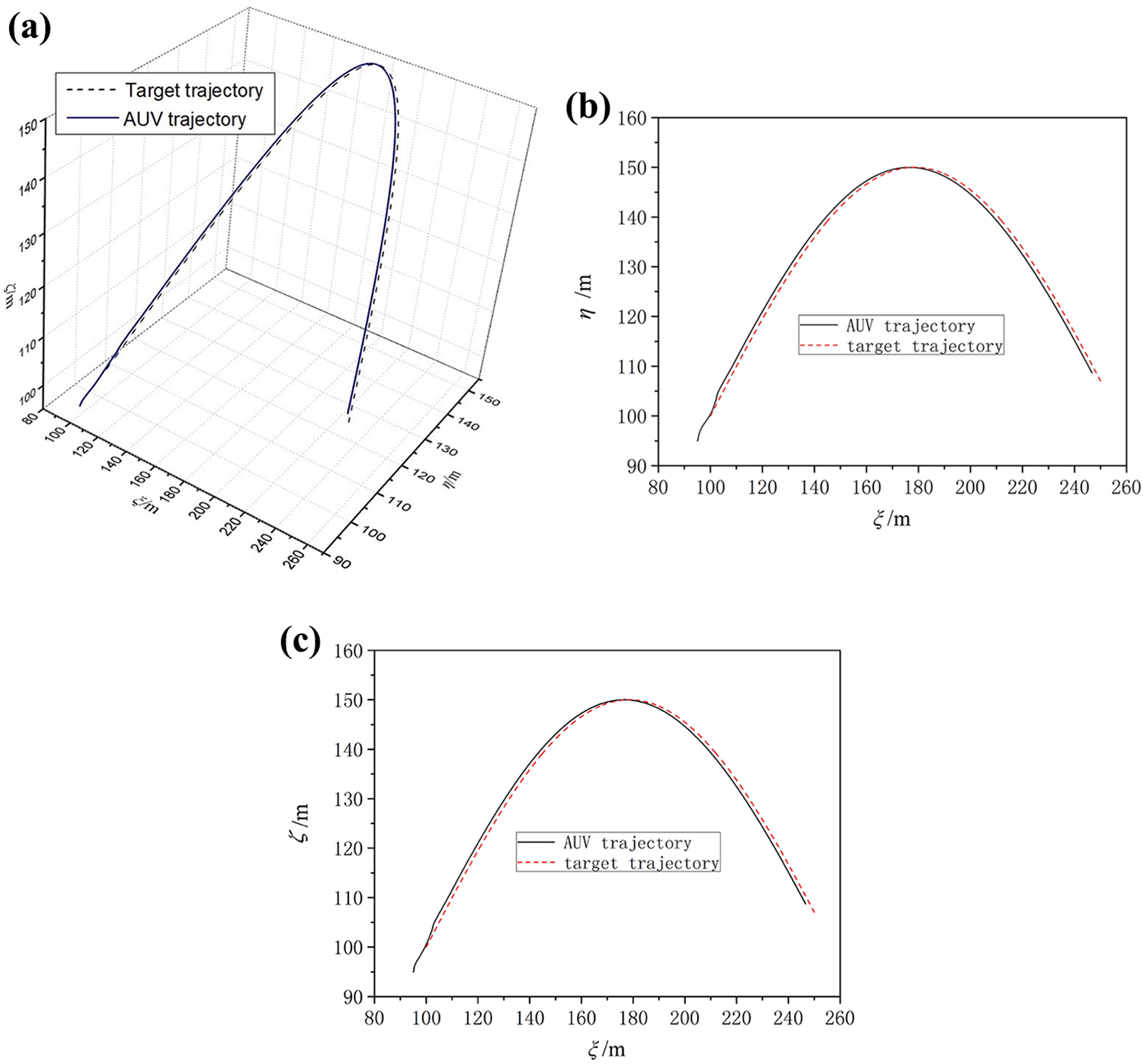
AUV and target trajectories. (a) 3-D space, (b) horizontal plane, and (c) vertical plane. AUV: autonomous underwater vehicle.

(a) Linear and (b) angular velocities of AUV. AUV: autonomous underwater vehicle.

Tracking errors. (a) Distance between the AUV and the target, (b) bearing angle in vertical plane, and (c) bearing angle in horizontal plane. AUV: autonomous underwater vehicle.
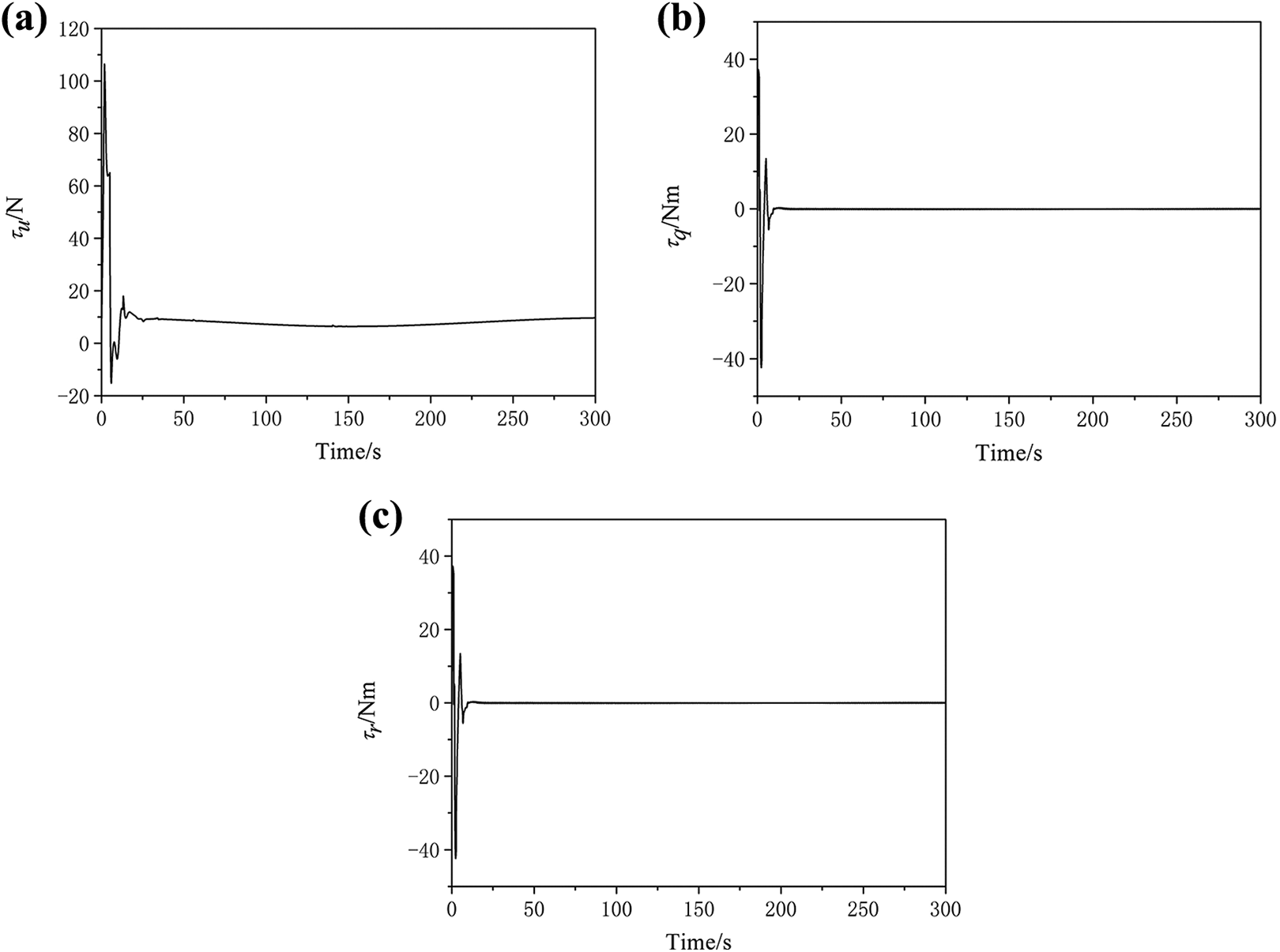
Control efforts: (a) force produced by thruster, (b) moment produced by elevators, and (c) moment produced by rudders.

Estimation of nonlinear dynamics: (a) surge force, (b) pitch moment, and (c) yaw moment.

Tuning response of adaptive gains: (a) λ-gain and (b) k-gain.
Figure 5 shows the trajectories of AUV and target in 3-D space and in horizontal and vertical planes. Although the AUV’s trajectory is different from the target’s, the tracking is stable. Figure 6 shows the linear and angular velocities of AUV during tracking. Figure 7 shows that range and bearing angle tracking errors, that is, (δ−δ 0), α and β, asymptotically converge to small neighborhood around zero. Figure 8 shows the required control efforts of longitudinal thrust, pitching moment, and yawing moment of AUV under the action of steady ocean current. It can be observed from Figures 8 and 9 that the thrust is larger in the initial stage, and then remains near 10 N. Figure 10 shows that the adaptive tune gains work well under the perturbation of steady currents.
Conclusion
In this article, an adaptive target tracking controller based on nonsingular terminal sliding mode control is designed for underactuated AUV. Unknown dynamics of the AUV are approximated by RBFNN. Adaptive tuning algorithm is employed to update gains of sliding mode controller and weights of the NN, which makes the system more robust to model uncertainties and external disturbances. Lyapunov method is utilized to examine the stability of the target tracking control system, which proves that all control inputs are bounded and tracking errors could converge to a small neighborhood of zero in finite time. In the end, simulation is carried out, and the results illustrate that the proposed controller is effective for underactuated AUV applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article:This work was supported by the National Natural Science Foundation of China (51779057, 51709061, and 51609047), the Equipment Pre-Research Project (41412030201), the Scientific Research Foundation for postdoctor of Heilongjiang Province (no. LBH-Q18039), the Stable Supporting Fund of Science and Technology on Underwater Vehicle Technology (JCKYS2019604SXJQR-07), and National Key R&D Program of China (no. 2017YFC0305700).