
Abstract
To solve the problem of artifact and image degradation caused by incomplete angle projection, this article presents an incomplete angle reconstruction algorithm based on sparse optimization and image optimization criterion (SO-IOC). Firstly, the joint objective function model is established based on the projection sparsity and the natural features of images. Secondly, by means of the idea of alternating direction method of multipliers, the augmented Lagrange method is used to decompose the reconstruction model into simple subproblems and the modified genetic algorithm is used for solving those subproblems. Finally, a multiobjective optimization operation is carried out to coordinate and select the candidate solutions to improve the quality of the reconstructed images. The algebraic reconstruction technique algorithm and the Split Bregman algorithm are compared with the SO-IOC algorithm. In the compared process, the mean relative error and the peak signal-to-noise ratio are used. The experimental results show the SO-IOC algorithm is best among the above three algorithms.
Introduction
The optical tomography is a new noncontact and nondestructive optical measurement technology that is originated from medical computed tomography technology. 1,2 It has been applied to medical diagnosis and industrial measurement. It has potential in the visual sense of medical robots. One of the important applications of the optical tomography is the fluorescence molecular tomography (FMT), which is a noninvasive imaging technique on the molecular level. The FMT can provide an important reference for early diagnosis, gene therapy, and so on via measuring the distribution of the quantitative fluorescence tracer in the object. In practical industrial applications, because of the complexity of the photon transmission in the object and the limit of measurement data on object surface, it is usually difficult to collect complete angle projection data, and the accuracy for image reconstruction will decline if there is not complete angle projection data, thereby resulting that the application of optical tomography in the industrial field is limited. The study of the incomplete angle reconstruction algorithm is an effective method to solve that problem. 3
Common incomplete angle reconstruction algorithms are iterative reconstruction algorithms based on algebraic reconstruction technique (ART). This kind of algorithms requires fewer projection data, while the calculations are huge and the reconstruction speeds are slow. In the last few years, the compressed sensing (CS) theory proposed by Candes et al. has provided a new method for the incomplete angle reconstruction. The CS theory was applied to the sparse sampling reconstruction and the reconstruction algorithm based on the total variation (TV) was proposed by means of minimizing the l 1 norm of the sparse image. 4 The algorithm reconstruction results are better and the convergence rate is fast. The CS theory has shown remarkable advantages in the application of the incomplete angle reconstruction. Pan et al. generated the estimated image according to the sparse principle and compared with the actual data and then iterated with errors to obtain more accurate reconstruction results. 5 Sidky and Pan applied the TV minimization algorithm with constraints to the reconstruction of incomplete data and proposed the TV gradient descent method. 6 Ritschl et al. adopted the method of alternate optimization of original data and sparse function, which can make the solution converge to the optimal value of sparse optimization without the prior knowledge of original data. 7 Park et al. adopted TV norm regularization based on gradient projection, which can be used for efficient reconstruction with nearly half of the projection reduced. 8
The sparse reconstruction algorithm can effectively reconstruct with a few of projected data, but it cannot ensure the quality of reconstructed images, because it does not take the natural characteristics of each image into account in the reconstructed area. In this article, the optimal criteria are used to describe the natural features of images; multiple optimal criteria are used to constrain the reconstructed image according to the idea of multiobjective optimization. Therefore, an incomplete angle reconstruction algorithm of sparse optimization and image optimal criterion (SO-IOC) is proposed in this article. In our method, sparse optimization is used to obtain the sparse images with the minimum l 1 norm, IOC is taken as the convergence direction of the subtarget constraint, and the quality of the incomplete angle reconstruction is improved.
The reconstruction model
In the FMT, the fluorescent substance in the object emits photons while it is stimulated by external pulse light source. The fluorescence intensity has a linear relation with fluorescent quantity. The fluorescence intensity is calculated by quantum efficiency, absorption, and fluorescence concentration. The FMT linear relation can be obtained by means of the FMT forward problem. For an unknown reconstruction region, the coefficient matrix of the reconstructed projection equation is known and unique when the imaging device is fixed. The given coefficient matrix A is M × N dimensional matrix, where M is the measured projection number and N is the reconstructed pixel number. The reconstructed image X is an I × J dimensional matrix, which can be written as an N-dimensional vector x = [x 1, x 2, ···, xN ]T. The projection data set P = [p 1, p 2, ···, pM ] is obtained from the actual measurement, and the iterative reconstruction projection equation can be obtained as formula (1)

In the incomplete angle reconstruction, N>>M, formula (1) is ill-posed. According to the regularization idea, sparse optimization is introduced as a prior knowledge in the reconstruction process. In sparse optimization, l 0 norm was used for model regularization to prevent over fitting. 9 The value of the regularization with l 0 norm is the number of nonzero parameters in the model, and the value of the regularization with l 1 norm is the sum of the absolute values of all the parameters in the model. However, the regularization with l 0 norm is a NP-hard problem, and the regularization with l 1 norm is easier to solve. Hence, the regularization with l 1 norm is used in our article. The regularization with l 1 norm, which can reach the sparse effect, is the optimal convex approximation of the regularization with l 0 norm. The l 1 norm minimization constraint is imposed on the reconstructed image pixel vector, as formula (2) shows

In the formula, ||*||1 is the l 1 norm. Formula (2) can be written into the form of objective function, and formula (1) is used as the constraint condition. The sparse constraint objective function is as follows

where f(x) is the target function. Image reconstruction needs some constraint criteria. In this article, these constraint criteria are as follows:
1. Least square criterion
The sum of squares of the difference between the reconstructed projection value and the direct projection value is the smallest,
10
that is to say, minimize ϕ
1(x)

where pj ∈P, xi ∈x, aji is the coefficient matrix element of j row and i column.
2. Maximum uniformity criterion
The sum of all differences between the value of each reconstructed pixel inside the region and the average value of its eight neighbors is the smallest, that is to say, minimize ϕ
2(x)

where xn ∈x, N* is the set of all pixels inside the region, N 8(xn ) is the eight neighbors of xn .
3. Smoothing criterion
To smooth the change of pixel data, the variance between estimated projection value and measured projection value should be minimized,
11
that is to say, minimize ϕ
3(x)

where
4. Maximum entropy criterion
The entropy of the reconstructed image is the maximum, that is to say, minimize ϕ
4(x)

where L is the maximum of pixel gray values in an image, and g(i) is the probability corresponding to the pixel gray value i.
The multicriterion constraint takes the multiple characteristics of the reconstructed image into account, but it increases the difficulty to balance the multiobjectives. In this article, the multiobjective optimization idea is introduced to obtain the optimal solution. 12 The single optimal criterion is taken as the subobjective and the projection condition is taken as the constraint. The mathematical model is as follows

where min{ϕ 1(x), ϕ 2(x), ϕ 3(x), ϕ 4(x)} means that ϕ 1(x), ϕ 2(x), ϕ 3(x), and ϕ 4(x) are simultaneously minimized. Formula (3) is taken as the model error function to reduce the solution error. Formula (8) is taken as a regularization function to improve image quality. The reconstructed objective function model can be obtained as follows

where min{f(x), ϕ 1(x), ϕ 2(x), ϕ 3(x), ϕ 4(x)} means that f(x), ϕ 1(x), ϕ 2(x), ϕ 3(x), and ϕ 4(x) are simultaneously minimized.
The process for solving the reconstruction model
In this article, by means of the idea of the alternating direction method of multipliers, 13 the augmented Lagrange method is used to decompose the reconstruction model into simple subproblems. The modified genetic algorithm is used for solving those subproblems. There are two reasons why the modified genetic algorithm is used. They are that the computation amount of the SO-IOC algorithm can be reduced and that the classical genetic algorithm is prone to fall into local optimum.
The applications of the augmented Lagrange method
The sparse constraint is a convex optimization problem in which variables can be separated 14 ; it is necessary to establish a standard to sparse the subproblem. Since there are a large number of zero elements in the incomplete angle projection coefficient matrix, the sparse standard can be set to zero matrix for direct solution during the initial calculation; in the iterative solution process, the optimal solution of the last operation is taken as the sparse standard and make a difference with the measured projection to carry out the sparse transformation, the next round of solution is carried out. 15
The sparse optimization subproblem is an extreme value problem with equality constraints. By constructing a Lagrange function, the above problem can be transformed into the solution of extreme values without constraints, 16 as shown in the following formula

where α = (α 1, α 2,…, α N)T is Lagrange multiplier. To increase the value of the nonfeasible set of the objective function, a positive penalty term is added to the Lagrange function to make it approach infinity as the penalty factor increases. The augmented Lagrange function is constructed with the conditional square term, as shown below

where ρ/2>0 is the penalty factor. Since f(x) and Ax-P are differentiable, there will be:



Hence, the following formula can be obtained

The iterative method is adopted to solve a series of unconstrained extreme values, and the optimal solution sequence is obtained, which converges to the optimal solution of the subobjective. The iterative formula can be summarized as follows

The applications of the improved genetic algorithm
In this article, the whole image pixels are taken as a population and the modified genetic algorithm is performed among the population sets.
Initial population and death penalty function
The equality constraint in the constraint subproblem is transformed into an inequality constraint, and the subobjective solution model is as follows

where ε is the set constraint space and t = 1, 2, 3, 4. The sparse images obtained by the augmented Lagrange method is taken as the initial population (x)0, the population size S is determined, a series of basic populations (x)1, (x)2, ···, (x) S are generated according to the uniform design criterion, 17 and the genetic computations are carried out based on the populations.
To accelerate the convergence of the algorithm, the death penalty function is used to evaluate the states of various groups in the constraint space. 18 If the individuals in the population are not in the constraint space, the population is regarded as an infeasible solution and discarded, the punishment fitness is

where s =1, 2,…, S; NU is the number of individuals outside the constraint space in the population; NB is a very large positive integer. In this article, NB = 105 is selected.
The improved genetic operations
In this article, the tournament selection, crossover, and mutation in the genetic process are modified, and the population fitness is established as follows

where c max is the maximum estimate of the target function.
In the process of tournament selection, the optimal saving strategy is adopted to improve the selection operator, which can effectively avoid local convergence. The operation process is as follows: the first step, the fitnesses are calculated in terms of the populations, and sorted; the second step, the sorted population set is divided into three segments and appropriate proportion is selected; the third step, the binary tournament is adopted to select the next population set. This method can effectively preserve the diversity of the populations and increase the probability of the optimal population entering the next generation. 18
The interpopulation crossover operation is to randomly select two populations from the population set and carry out real number coding for pixel positions. When the populations intersect, the ith population and the jth population intersect at the qth pixel is as follows

where
The mutation operation between the populations is to randomly select one population from the population set and obtain the next population by mutation at a certain probability. In the case of mutation, the mutation operation method of the ith population at the qth pixel is as follows

where x max and x min are upper and lower bounds of the variable pixel; r is a random number between [0, 1]; f(g) = r 2(1−k/G max), where k is the current iteration number and G max is the preset iteration number and r 2 is a random number between [0, 1]. The new population set Qq is obtained by the above operation, and the noninferior ranking and crowded comparison operation are carried out on Qq to obtain the noninferior front end of uniform distribution. 20 Compare the objective functions of each solution in the noninferior front end and the one with the smallest value is the Pareto optimal solution xp areto. The projection errors of xp areto are compared. If the setting requirements are met (the error is ≤0.1%), the xp areto is taken as the sparse benchmark for the next iteration. A summary of the SO-IOC algorithm can be found in Table 1.
The SO-IOC algorithm.
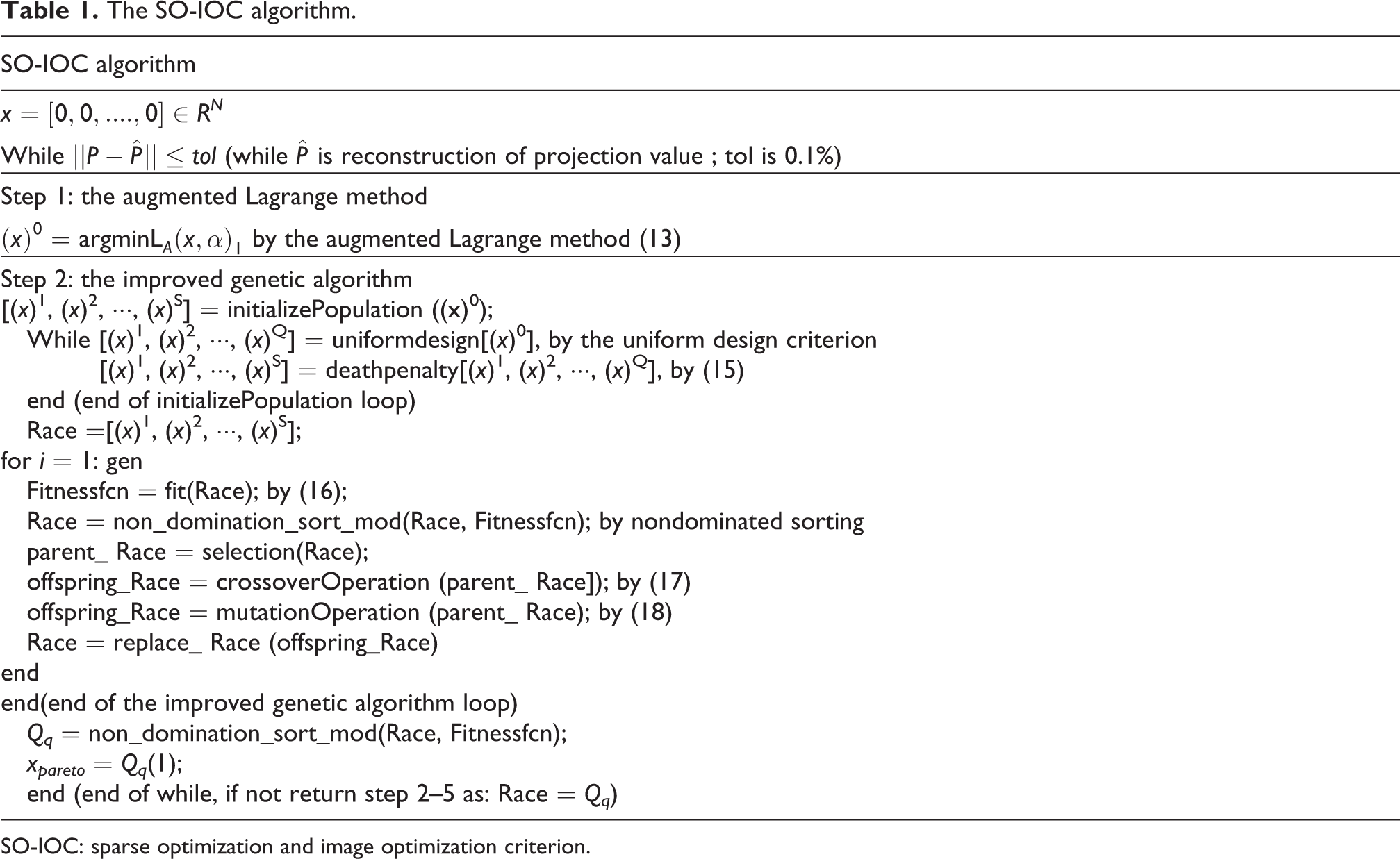
SO-IOC: sparse optimization and image optimization criterion.
The comparative experiment and result analysis
The simulation model with a square hole is taken as the experimental object, its outer part is resin material and the part in the hole is fluorescence doped material, as shown in Figure 1(a). Its original slice has clear boundaries, as shown in Figure 1(b). In experimenting, 80 scanning projection angles within the range of 180° are chosen to obtain projection data. The coefficient matrix is constructed according to the reference. 21

The schematic diagram of simulation model: (a) the simulation model and (b) the sections for the simulation model.
To verify the reconstruction performance of the SO-IOC algorithm proposed in this article, under the influence of incomplete projection angle and the white Gaussian noise, the reconstruction results of the ART algorithm, the Split Bregman (SpBr) algorithm, and the SO-IOC algorithm are compared. The ART algorithm is a classical algorithm in the incomplete angle reconstruction, in which the reconstruction results are obtained by line-by-line correction. 22 The SpBr algorithm is a new TV algorithm proposed by Goldstein and Osher, 23 which is widely used in the field of image processing and can suppress reconstruction noise. The image reconstruction quality is evaluated objectively and comprehensively by the mean relative error (MRE) and the peak signal-to-noise ratio (PSNR). 24,25
Setting of parameters
The convergence degree of iterative reconstruction is decided by the penalty weight ρ/2 in formula (11). An overlarge ρ will lead to a decrease in iteration accuracy, while a ρ with quite small value will slow down the iteration speed. The experimental analysis shows that the algorithm gets convergent when ρ ∈ [0, 1]. The MRE and the PSNR are used to evaluate ρ. The MRE and the PSNR vary with ρ as shown in Figure 2.

The MRE and the PSNR vary with ρ: (a) the MRE and (b) the PSNR. MRE: mean relative error; PSNR: peak signal-to-noise ratio.
When ρ = 0.5, the MRE is the minimum and the PSNR is the maximum, in other words, the error is the minimum and the image quality is the best. Thus, let ρ = 0.5 in the following experiments.
Number of individuals in a population is decided by the scanning device physical structure, we do not discuss in this section. In the optimization process using the modified genetic algorithm, if the population size S is too large, the convergence rate will decrease, and if the population size S is too small, it will be difficult to optimize in the whole solution space. Experimental analysis shows that the algorithm has higher accuracy and shorter convergence time when the population set size is between 16 and 32 (see Figure 3).

The MRE, the PSNR, and the convergence time vary with S: (a) the MRE, (b) the PSNR, and (c) convergence time. MRE: mean relative error; PSNR: peak signal-to-noise ratio.
When the death penalty function is used, 19 the solution of the genetic algorithm converges rapidly, and the outputs of the objective functions are stable after 5–20 iterations, as shown in Figure 4.

The convergence diagram of the genetic algorithm: (a) the first subtarget, (b) the second subtarget, (c) the third subtarget, and (d) the fourth subtarget.
Incomplete angle projection reconstruction
In incomplete angle projection reconstruction, there are two cases: limited-angle and sparse-angle reconstruction. 3 In the limited-angle reconstruction, scanning angle is less than 180°. In sparse-angle reconstruction, within the range of 180°, acquire projection data with less than the Nyquist sampling rate.
Let the relaxation factor λ = 0.9 in the ART algorithm. Set the relaxation factor λ = 0.9 and set the regularization parameter μ = 0.5 in the SpBr algorithm. Let ρ = 0.5, S = 20, and G max = 20 in the SO-IOC algorithm proposed in this article.
Limited-angle reconstruction
The projection data at 40 angles are collected within a range of 90°, and the ART algorithm, the SpBr algorithm, and the SO-IOC algorithm are used for reconstruction respectively, the reconstruction results are shown in Figure 5.

The results of limited-angle reconstruction from the different algorithms: (a) ART, (b) SpBr, and (c) SO-IOC. ART: algebraic reconstruction technique; SpBr: Split Bregman; SO-IOC: sparse optimization and image optimization criterion.
Figure 5 shows that the edges of the reconstruction images with the ART algorithm are blurry. For the ART algorithm, the iterative solution has the highest efficiency when the hyperplanes in the iterative equation are orthogonal. However, this kind of situation is infeasible in the actual computation, and it can enhance the influence of measurement noise that make the resolution and the definition of the edges fallen sharply. Figure 5 shows that the SpBr algorithm can effectively protect the edges of the reconstruction image. However, there are big losses on both ends of the fluorescence distribution areas due to the truncation effect of the SpBr algorithm. Figure 5 shows that the SO-IOC algorithm can better reconstruct the distribution on both ends. In conclusion, the SO-IOC algorithm has a better result.
Sparse-angle reconstruction
In the sparse-angle reconstruction, the projection data at 40 angles are collected within a range of 180°, and the ART algorithm, the SpBr algorithm, and the SO-IOC algorithm are used for reconstruction; the reconstruction results are shown in Figure 6.

The results of sparse-angle reconstruction from the different algorithms: (a) ART, (b) SpBr, and (c) SO-IOC. ART: algebraic reconstruction technique; SpBr: Split Bregman; SO-IOC: sparse optimization and image optimization criterion.
Figure 6 shows that the edges of the reconstruction images with the ART algorithm and the SpBr algorithm are blurry and that the edges of the reconstruction images with the SO-IOC algorithm are distinct. In conclusion, the SO-IOC algorithm has a better result.
Incomplete angle projection reconstruction
The above three algorithms are all approximate solutions to the gray values of actual pixels. The projection error is the difference between the measured projection and the simulated projection, and the cutoff projection error is set at 0.1%. The convergence degree of the algorithms can be measured by the number of iterations and the relative solution error norm (RSEN). The RSEN is shown as follows

where x true is the true value of the simulation model. The changes in the RSEN of each algorithm in the iteration process are shown in Figure 7.

The RSEN of each algorithm in the iteration process. RSEN: relative solution error norm.
As can be seen from Figures 5 to 7, due to the lack of projection data, serious edge effect appears in the ART algorithm, and the projection error is close to zero in the reconstruction process, which leads to the termination of the iteration and the reconstruction cannot be completed successfully. The reconstruction process of the SpBr algorithm needs to solve the minimum value of TV, it takes a long time and appears local fuzzy. Although the reconstruction of the SO-IOC algorithm under sparse constraints is similar to that of the SpBr algorithm, the reconstruction can be corrected by the optimal criteria. Hence clearer reconstruction result can be obtained by the SO-IOC algorithm.
In the incomplete angle reconstruction, the accuracy for image reconstruction and efficiency of each algorithm are compared, and the reconstruction results of the SpBr algorithm and the SO-IOC algorithm are better than the ART algorithm, as presented in Table 2. In the limited-angle reconstruction, compared with the ART algorithm, the MRE of the SO-IOC algorithm decreases by 31.9% and the PSNR of the SO-IOC algorithm increases by 14.016dB; while compared with the SpBr algorithm, the MRE of the SO-IOC algorithm decreases by 12.2% and the PSNR of the SO-IOC algorithm increases by 5.695dB. In the sparse-angle reconstruction, compared with the ART algorithm, the MRE of the SO-IOC algorithm decreases by 55.4% and the PSNR of the SO-IOC algorithm increases by 15.71dB; while compared with the SpBr algorithm, the MRE of the SO-IOC algorithm decreases by 17.1% and the PSNR of the SO-IOC algorithm increases by 8.495dB. Table 2 presents that the SO-IOC algorithm has a high reconstruction efficiency.
The results for the incomplete angle reconstruction.

MRE: mean relative error; PSNR: peak signal-to-noise ratio; ART: algebraic reconstruction technique; SpBr: Split Bregman; SO-IOC: sparse optimization and image optimization criterion.
Incomplete angle projection reconstruction under the white Gaussian noise
In the actual measurement environment, the projection data collected are susceptible to noise pollution due to on-site environmental interference factors and measurement system errors. Hence it is necessary to analyze the anti-noise ability of the algorithm. Add 1–10 dB white Gaussian noise to incomplete angle projection reconstruction to simulate noise pollution in the process of collection.
Limited-angle reconstruction with noise
Noise is added to data of 40 projection angle within a range of 90°, the ART algorithm, SpBr algorithm, and SO-IOC reconstruction algorithm are employed, and the MRE and the PSNR of the different algorithms are shown in Figure 8:
The MRE and PSNR of the different algorithms with changing noise: (a) MRE and (b) PSNR. MRE: mean relative error; PSNR: peak signal-to-noise ratio.
As can be seen from Figure 8, the reconstruction performance of each algorithm decreases due to the influence of the white Gaussian noise. The ART algorithm is greatly affected by the noise, and the MRE of reconstruction increases significantly with the increase of the noise. The MRE of the SO-IOC algorithm is 28–34.2% lower than that of the ART algorithm, and 10–16.6% lower than that of the SpBr algorithm. The PSNR of the SO-IOC algorithm is 10.1–13.6 dB higher than that of the ART algorithm and 4.0–5.3 dB higher than that of the SpBr algorithm.
Sparse-angle reconstruction with noise
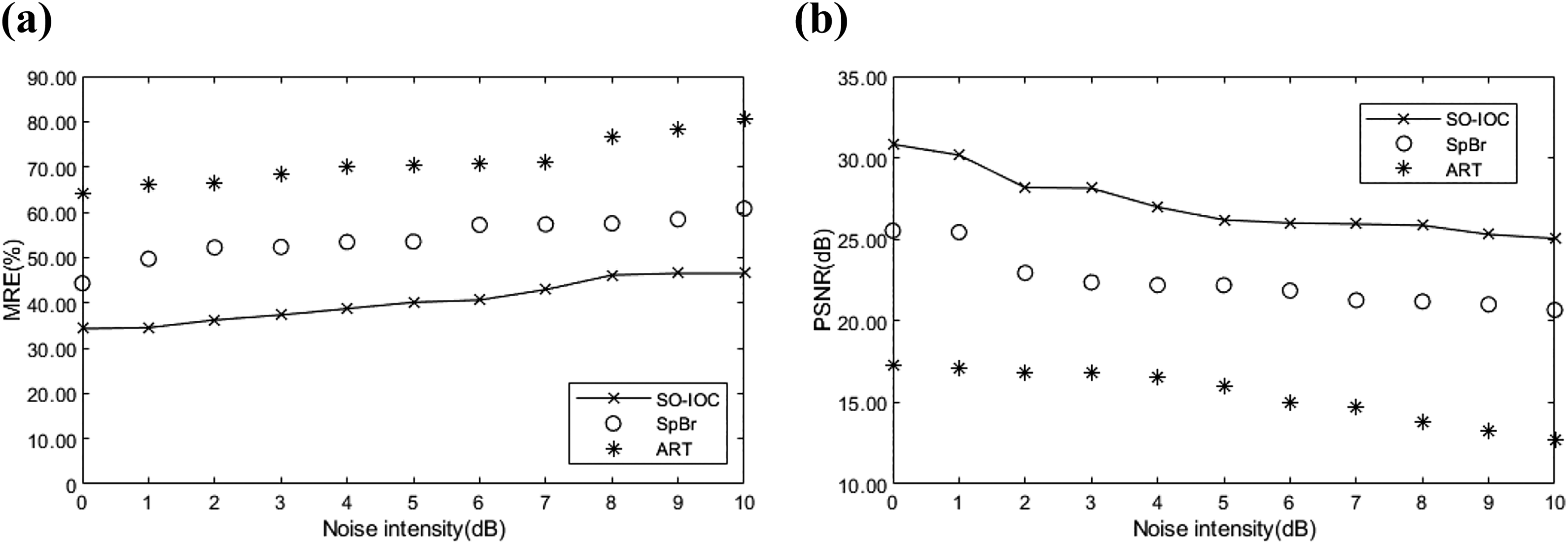
Noise is added to data of 40 projection angle within a range of 180°, the ART algorithm, SpBr algorithm, and SO-IOC reconstruction algorithm are employed, and the MRE and the PSNR of the different algorithms are shown in Figure 9.

The MRE and PSNR of the different algorithms with changing noise: (a) MRE and (b) PSNR. MRE: mean relative error; PSNR: peak signal-to-noise ratio.
As can be seen from Figure 9, the noise has a greater influence on sparse reconstruction. With the increase of noise intensity, the index of the SO-IOC algorithm still keeps the good level. The MRE of the SO-IOC algorithm is 52.3–55.8% lower than that of the ART algorithm and 12.2–16.8% lower than that of the SpBr algorithm. The PSNR of the SO-IOC algorithm is 16.7–21.6 dB higher than that of the ART algorithm and 9.7–12.1% higher than that of the SpBr algorithm.
The reconstruction of the ART algorithm heavily relies on the quality of the projected data. When the projected data are polluted by noise, the image edge will be blurred. The SpBr algorithm is based on the idea of approximation, and noise affects the convergence performance of the algorithm. The SO-IOC algorithm can effectively improve the smoothness and uniformity of the image through the reconstruction based on the optimal criteria.
Analysis of the experimental results
The different algorithms are used for reconstruction of the resin plate with the fluorescent material inside. The experimental parameters are as follows: the thickness of the resin plate is 10 mm thick, the scattering coefficient of the resin is 0.8 mm−1, the absorption coefficient is 0.01 mm−1, and the cylinder fluorescence mixture with a diameter of 5 mm is filled in the middle of the plate. The resin plate is shown in Figure 10. 26 The scanning projection data are provided by the Invitrogen laboratory in California. 26,27

The resin plate for the experiment.
The scanning projection data are used for reconstruction. The reconstruction results of the ART algorithm, the SpBr algorithm, and the SO-IOC algorithm are shown in Figure 11(a) to (c). In the reconstruction process, the ART, SpBr, and SO-IOC algorithms take 62.71 s, 301.83 s, and 185.66 s, respectively. The distribution center of the fluorescent material is located at 8.5 cm (6 mm at coordinate system) and the distribution of the fluorescent material is about 5 mm wide. The cross-section distributions of the reconstruction results of each algorithm are compared, as shown in Figure 11(d).
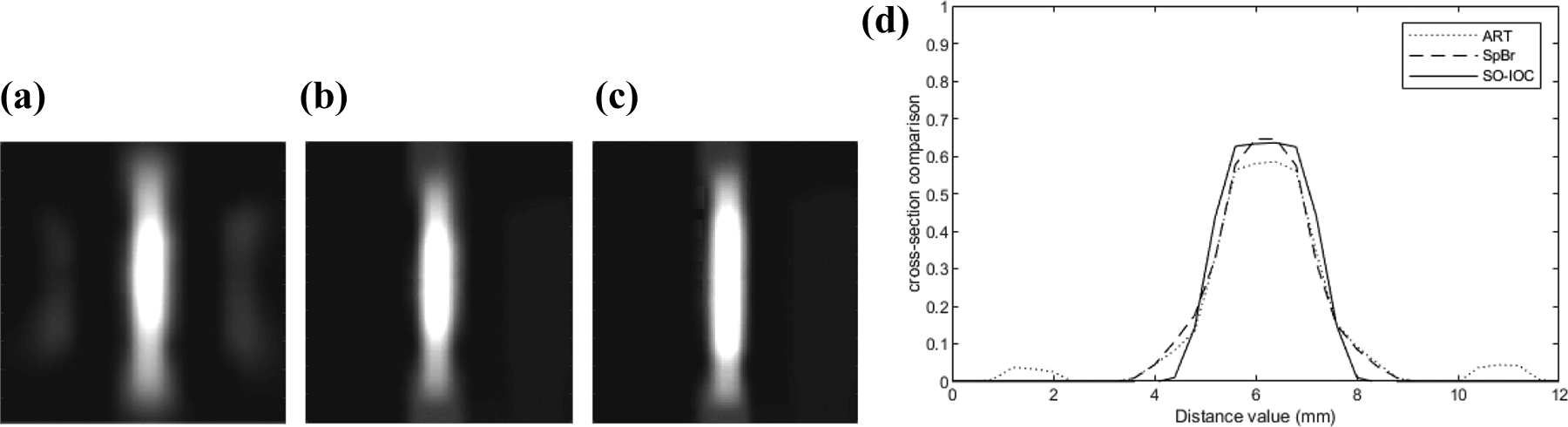
The reconstruction results from the different algorithms: (a) ART, (b) SpBr, (c) SO-IOC, and (d) the cross-section distributions from the different algorithms. ART: algebraic reconstruction technique; SpBr: Split Bregman; SO-IOC: sparse optimization and image optimization criterion.
As can be seen from Figure 11, reconstruction of the experiment, all of three reconstruction algorithms can accurately reconstruct the center location of the fluorescent material distribution. The reconstruction results for the three algorithms are compared. The result for the ART algorithm appears the symmetrical artifacts on both sides, which is bad for reconstruction of the distribution of the fluorescent material. The SpBr algorithm achieves a better performance in reconstructing the distribution of the fluorescent material, but there is certain deviation between the reconstruction result and the known width of the fluorescent material distribution. The result for the SO-IOC algorithm has sharpest edges, and the result accords with the known fluorescent material distribution to the largest extent. In summary, the SO-IOC algorithm outperforms the other two algorithms in reconstruction.
Conclusions
For incomplete angular optical tomographic reconstruction, this article proposes a SO-IOC algorithm that combines sparse optimization and image optimization criteria. The joint target model is established, and on the basis of prior knowledge, the augmented Lagrange method and the modified genetic algorithm are combined by using the alternative solution method. The reconstruction results show that the SO-IOC algorithm not only reduces the reconstruction error but also improves the image reconstruction quality and effectively reduces the influence of noise. In the experimental analysis, the simulation model and the resin plate containing fluorescence mixture are taken as the research objects. The reconstruction results from the ART algorithm, the SpBr algorithm, and the SO-IOC algorithm are compared and analyzed. The reconstruction results show that the SO-IOC algorithm proposed in this paper performs well under incomplete angle and white Gaussian noise. However, the SO-IOC algorithm needs more long reconstruction time, and it is suitable for the situation with low real-time requirement. In the follow-up research works, we are committed to the fast algorithm for the SO-IOC algorithm.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation of China [61661038 and 61661039].