
Abstract
This article focuses on the problem of optimal linear quadratic Gaussian control for networked control systems with multiple delays and packet dropouts. The main contributions are twofold. Firstly, based on the introduced maximum principle for linear quadratic Gaussian system with multiple input delays and packet dropouts, a nonhomogeneous relationship between the state and costate is obtained, which is the key technical tool to solve the problem. Secondly, a necessary and sufficient condition for the optimal networked control problem is given in virtue of the coupled Riccati equations, and the explicit expression of the optimal controller is presented. Numerical examples are shown to illustrate the proposed algorithm.
Introduction
Networked control systems (NCSs) are spatially distributed systems which transmit information between sensors, actuators, and controllers via a shared communication network. 1 –3 With the wide use of computer and the rapid development of network technology, NCSs are found in a wide range of applications in various fields, such as mobile sensor networks, building automation surveillance, and reduction of car wiring, which makes the control systems more complicated and has attracted considerable attentions. 4 –6 However, the situation of time delay and data loss often occurs in the process of communication. This motivated us to study the optimal control for NCSs with multiple delays and packet dropouts.
As for the optimal control for NCSs problem, many results have been surveyed. 7 –14 Cacace et al. 7 studied the linear time invariant linear quadratic Gaussian (LQG) problems with a single input delay and instantaneous state feedback. Yang et al. 10 presented a method for the compensation of a networked state-feedback control system, which possesses a randomly varying transmission delay and uncertain process parameters. Zhang et al. 12 studied the classic linear quadratic regulation (LQR) problem for both continuous-time and discrete-time systems with multiple input delays. Ma et al. 13 designed a state-feedback controller for the closed-loop system with both discrete and distributed input time delays in terms of the solvability of certain Hamilton–Jacobi inequalities. And they 14 studied the nonlinear Markovian jump systems subject to actuator failures and mixed time-delays and proposed the sufficient conditions for the existence of the desired controller. On the other hand, the problem on packet dropout occurred in NCSs is studied widely. Yu et al. 15 obtained the sufficient conditions on the stability and stabilization of the NCSs with packet dropout. Gao et al. 16 considered linear quadratic (LQ) optimal control problems based on state observer for a class of discrete-time system over lossy data network. Gupta et al. 17 investigated the optimal LQG control by decomposing the system into a standard LQR state-feedback controller, applying the method of optimal encoder–decoder. Liang and Xu 18 studied the packet dropout LQG control for NCSs with both local and remote controllers and gave the expression of the optimal controller. Moreover, the more applicability research on NCSs with both packet dropouts and time delay can be shown in the literature. 19 –21 Liang et al. 19 obtained the necessary and sufficiency condition for the discrete stochastic LQG control system with multiplicative noises and input delay and presented the suboptimal controller when the separation principle did not hold. Zhang et al. 20 investigated the optimal results of LQR control system in both finite-horizon case and infinite-horizon case, where exist delay and multiplicative noise. What’s more, there are many references about the control of NCSs with multiple time delays and packet loss. Fischer et al. 22 derived an optimal solution to the LQG control problem and proved that the separation principle holds, based on the network control system where control inputs and measurements are transmitted over transfer control protocol (TCP)-like network connections that are subject to random transmission delays and packet losses. Liang et al. 23 obtained the optimal LQR controller separately from the state estimator and derived a necessary and sufficient condition for the mean-square stabilization when there are both delays and packet dropouts in the NCSs.
However, there is no LQG control for NCSs with both multiple time delays and packet dropouts in the above literature. Inspired by the work of Liang and Xu
18
and Liang et al.
23
we consider the NCSs with the assumption that one communication channel with large packet dropout probability, while the other communication channel with both small packet dropout probability and time delay. The case is shown in Figure 1, which is composed of a plant, a controller, and two actuators. In the closed loop, obviously, the state xk
is sent to the controller, and output as uk
. When the signal is transited to actuators over unreliable communication channel in the case of assumption, there will exist packet dropouts and time delays, that is,

Overview of NCSs with time delays and packet dropouts. NCS: networked control system.
Motivated by Li et al., 24 we expend the results of optimal LQR control with multiplicative noises and multiple input delays into NCSs subject to multiple delays and packet dropouts. Moreover, we study the optimal LQG control of NCSs by adding the additive noise. Noting the approach of solving the forward and backward stochastic difference equations (FBSDEs), 19,20,24 this article studies the optimal LQG control problem for NCSs with both multiple time delays and packet dropout. Different from the literature, 13,14 the key technique of this article is to apply the maximum principle of multiple delays system to obtained the solution to FBSDEs, which is the nonhomogeneous relationship of the state and the costate. The main contributions of this article are summarized as follows: (1) A solution to the FBSDEs is obtained based on the derived maximum principle for NCSs with delays and packet loss. (2) In terms of the solution of the FBSDEs, a necessary and sufficient condition is given for the optimal LQG control.
Notation
Rn
denotes the n-dimensional real Euclidean space. I represents the unit matrix of appropriate dimension. The superscript
Problem formulation
Consider the discrete stochastic LQG system with multiple input delays and packet dropouts, the corresponding plant in Figure 1 is given by

for

And

where
for
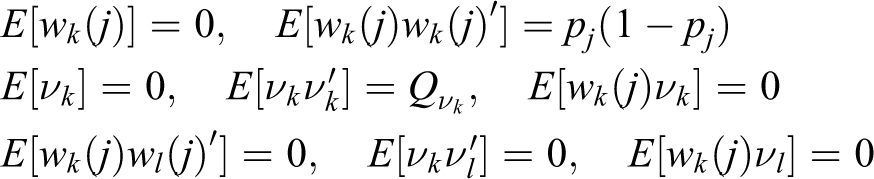
The associated cost function for system (2) is given by

where Q, R, and
Problem 1
Find the unique
Main results
By applying the Pontryagin’s maximum principle to the discrete LQG system (2) with the cost function (3) yields that



where

for
To make further study, we define the following coupled Riccati difference equations

where

with




The terminal values are given by

It is stressed that the key to solve the optimal LQG control problem is to solve the FBSDEs (2) and (4)–(6). We now give the nonhomogeneous relationship of the optimal costate
Lemma 1
Supposing that

is the solution to FBSDEs (2) and (4)–(6). And
Proof
The proof of Lemma 1 is provided in Appendix 1.
Based on the maximum principle and the solution to the FBSDEs from Lemma 1, we can present the optimal control results of Problem 1.
Theorem 1
There exists a unique

The associated optimal performance index is given by

where
Proof
The proof of Theorem 1 is provided in Appendix 2.
Now we obtained the special case of NCSs with multiple delays and packet dropouts which is contained with only uk
and
Remark 1
For stochastic NCSs with multiple delays and packet dropouts, the corresponding plant is given by

for
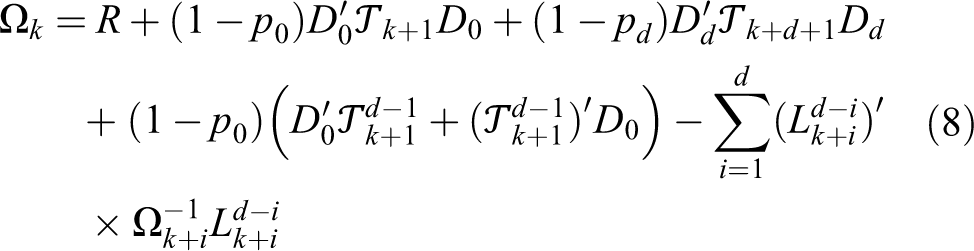
Besides, the Riccati equations (8), (11), and (13) will be as follows:



for
In this context, there exists a unique

with the associated optimal cost function

In addition, the relationship of the optimal costate
Numerical examples
Example 1
Consider the scalar case of LQG control system with multiple delays and packet dropouts (2), and the cost function (3). As the coefficients with

By applying Theorem 2 and equations (8) –(15), it yields that



Obviously,

The optimal controller uk .
Accordingly, the optimal value of equation (18) is
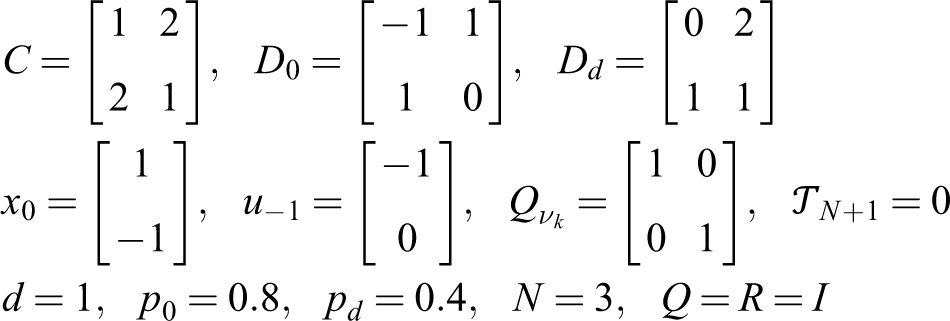
Example 2
Consider the LQG control system with multiple delays and packet dropouts (2) with
By applying Theorem 2 and equations (8) –(15), it yields that
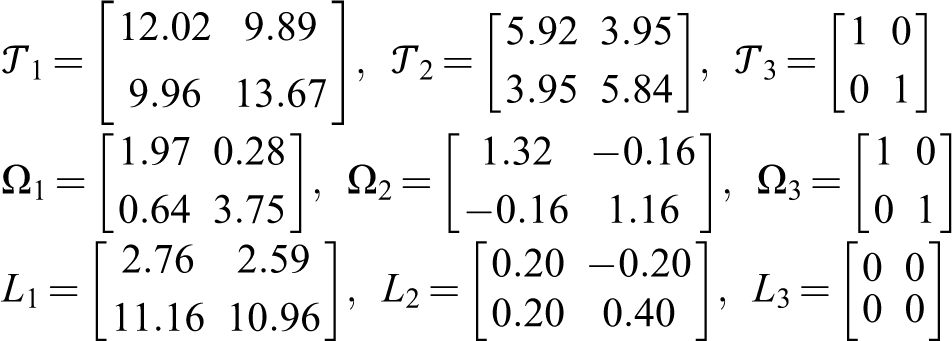
Obviously, for

Accordingly, the optimal value of equation (18) is
Conclusion
In this article, the optimal LQG control of NCSs with multiple delays and packet dropouts has been studied. A necessary and sufficient condition for the existence of unique optimal controller to the problem is given, which is based on the obtained maximum principle and the solution to the introduced coupled difference equations. Under this condition, the optimal controller and the minimized performance index are represented. In the future works, we expect that the results in this article pave new ways for the stabilization of the NCSs with multiple delays and packet dropouts. Moreover, the optimal output-feedback control for the NCSs with delays and packet dropouts will be studied in our further research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61903233), the “Special Funding for Top Talents” of Shandong Province (61773245, 61603068, 61806113, 61922051, 61933006, 91848206, 61733017, 61873179), Shandong Province Natural Science Foundation (ZR2018ZC0436, ZR2018PF011, ZR2018MF019), Key Research and Development Program of Shandong Province (2018GGX101053), and Taishan Scholarship Construction Engineering.