
Abstract
In this article, an active collision avoidance based on improved artificial potential field is proposed to satisfy collision avoidance for intelligent vehicle. A longitudinal safety distance model based on analysis of braking process and a lane-changing safety spacing model based on minimum time of lane changing under the constraint of sideslip angle are presented. In addition, an improved artificial potential field method is introduced, which represents the influence of environmental information with artificial force. Simulation results demonstrate the superior performance of the proposed algorithm over collision avoidance for intelligent vehicle.
Keywords
Introduction
With the development of autonomous vehicles, active collision avoidance systems have drawn more attention. 1 Statistics show that vehicle accidents around the world accounts for about 90% of accidents. 2,3
To reduce the damage caused by vehicle accidents, researchers have carried out extensive research on vehicle collision avoidance algorithms. Some scholars established the vehicle safety distance model based on braking process to design an active collision avoidance algorithm for rear-end collision. 4 –7 Algorithm considers the extreme conditions that forward obstacle stops suddenly, which may lead to frequent false alarms. Also, some scholars propose an active collision avoidance algorithm based on collision time safety distance model. Seiler et al. established a safe distance model based on collision time threshold. 8 Kim and Kum proposed a safe distance model considering the collision time and state of front vehicle. 9 The models are designed for specific speed condition; failing to consider the speed factor, it could result in inconsistent driving judgment of safety and smaller safety distance than needed. 10 –12 Artificial potential field method is first proposed by Khatib and applied to robot collision avoidance. 13 Amiryan and Jamzad proposed an improved artificial potential field to solve the problem of local minimum value in the artificial potential field. 14 However, the artificial potential field method has not fully taken the road environment into account, limiting the application of artificial potential field method on vehicle collision avoidance.
In this article, based on vehicle sensor information, the vehicle longitudinal safety model is established considering motion state of vehicle and obstacle. Also, the lateral safety distance model is established with consideration of minimum lane-changing time constrained by the maximum sideslip angle. On the basis of considering the longitudinal safety and lane-changing safety time comprehensively, an active collision avoidance model based on the improved artificial potential field method is built. The longitudinal braking and lateral lane-changing forces of vehicles are characterized by the artificial potential field force. The longitudinal safety distance model and lane-changing safety spacing model proposed in this article can provide reliable and efficient basis for active collision avoidance algorithm. Also, active collision avoidance model based on improved artificial potential field can achieve collision avoidance in shorter time, providing better safety and efficiency for intelligent vehicle. The schematic representation of collision avoidance algorithm based on improved artificial potential field is shown in Figure 1.
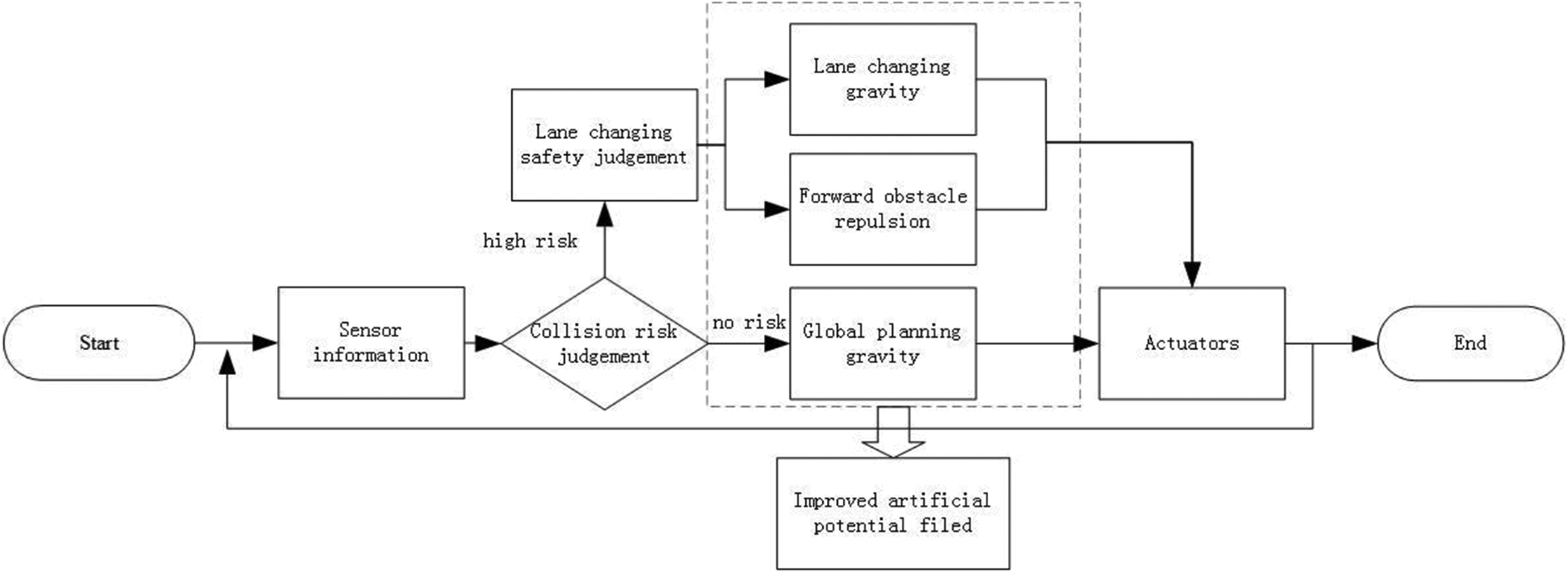
Schematic representation of collision avoidance algorithm based on improved artificial potential field.
Safety distance model
To determine the safety state of both longitudinal driving and lane-changing process, a longitudinal safety distance model and a lane-changing safety spacing model are established in this section.
Longitudinal safety distance model
A longitudinal safety distance model is established based on road condition and vehicle motion state to reflect the longitudinal safety characteristics.
Vehicle braking performance can be affected by factors such as ability of vehicle braking system, road friction coefficient, and driving environment. Assuming that the vehicle braking system can make full use of pavement adhesion, the maximum braking deceleration is mainly affected by road friction coefficient. The smallest longitudinal safety distance needed is shown in Figure 2. The longitudinal grading safety distance model is established on the basis of vehicle speed, maximum braking deceleration, forward obstacle speed, and deceleration 15

Longitudinal safety distance model.



where
Lane-changing safety spacing model
Lane-changing safety spacing model is established to avoid rear-end accidents with obstacle on adjacent lane during lane changing in this part.
The maximum steering wheel angle under constraint of vehicle slip angle: To reflect the maximum steering wheel angle under constraints of different vehicle side slip angle, a vehicle steering constraint model is established and analyzed. In this model, vehicle is designed to drive at a preset speed and steering angle. During the driving process, the maximum vehicle side slip is recorded. After repeated tests, the maximum steering wheel angles under the constraint of preset vehicle speeds and side slip angles are obtained. 16
The maximum steering wheel angles under the constraint of vehicle side slip angle based on simulation analysis of vehicle model used in this article are presented in Table 1.
Maximum steering wheel angle under the constraint of vehicle side slip angle.
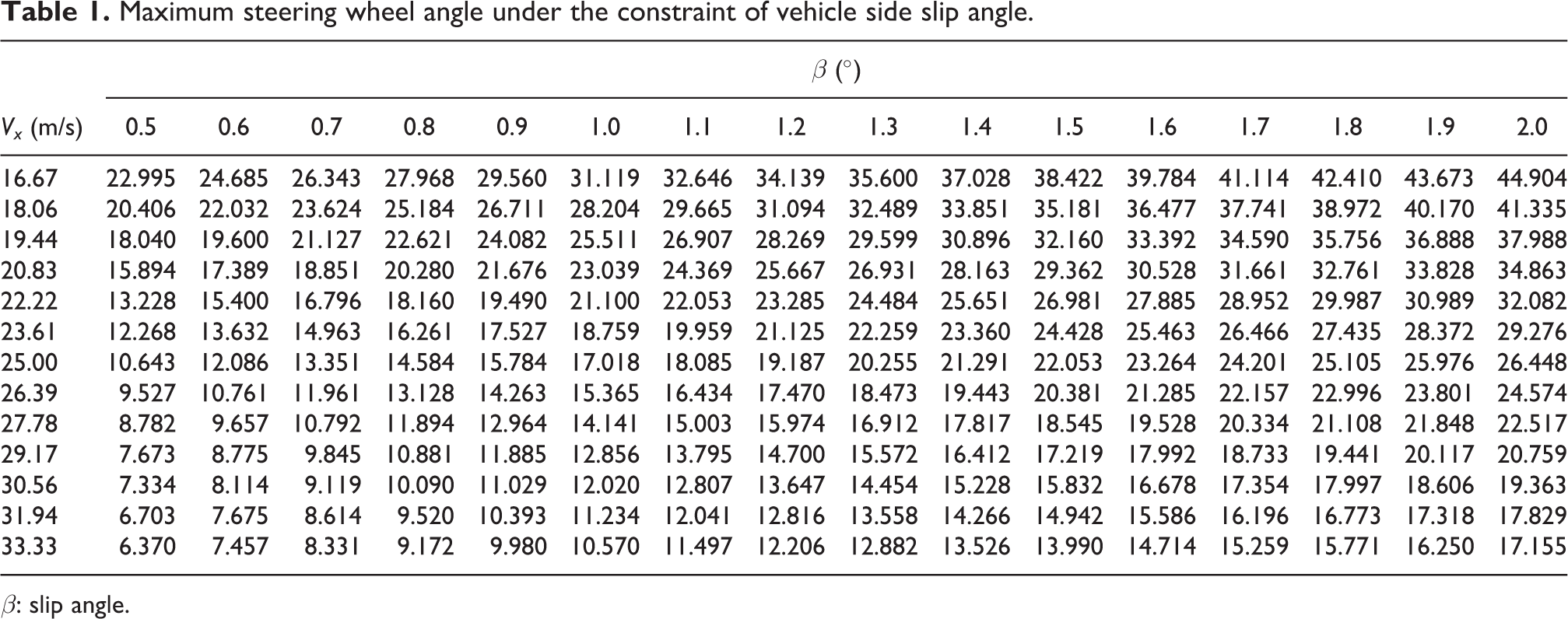
β: slip angle.
According to the data in Table 1, a nonlinear regression is made to determine relationship among vehicle steering wheel angle, vehicle speed, and the side slip angle constraint.
Fitting equation and diagram are shown as follows

where δ represents vehicle steering wheel angle.
The maximum vehicle steering wheel angle under constraint of side slip angle at different speed is shown in Figure 3.

The maximum vehicle steering wheel angle under constraint of side slip angle at different speed.
2. Minimum lane-changing time: As shown in Figure 4, vehicle trajectory in lane-changing process can be regarded as two arcs. The length of vehicle trajectory in lane-changing process is analyzed. 17

Vehicle trajectory in lane-changing process. R represents vehicle turning radius, L represents vehicle wheelbase, σ represents front wheel angle, α represents core angle of arc AB, and
Lane-changing time can be calculated using the following formula

where KT
represents lane-changing time coefficient and
3. Safety space calculation: As shown in Figure 5, front and rear safety spacing model of lane changing are established on the basis of lane-changing time.

Lane-changing safety space.
To avoid collision with front obstacle, a front safety spacing model is established based on information of vehicle motion and front obstacle motion 18

where judf represents discrimination parameters of front obstacle collision risk,
To avoid collision with rear obstacle, a rear safety spacing model is established based on information of vehicle motion and rear obstacle motion

where judb represents discrimination parameters of rear obstacle collision risk,
When condition
Improved artificial potential field model
In this section, an improved artificial potential field model is established to satisfy collision avoidance by both braking and lane changing on expressway.
The main idea of artificial potential field is to add target artificial attraction and obstacle artificial repulsion to robot. By taking both repulsion and attraction into consideration, a real-time obstacle avoidance path is proposed. 19 It has been widely used in robot local path planning. 20 –22 In the model, improved virtual repulsion and gravitation models with multiple constraints are used to provide control for collision avoidance.
Model of artificial gravitation
Artificial gravitation represents the environmental factors which have attractive effect on vehicle. In this article, it includes global planning artificial gravitation used to characterize the driving direction of the vehicle and the lane-changing artificial gravitation used to characterize the traction effect of the lane-changing operation on the vehicle.
23
Global planning gravitation: Global planning gravitation is used to characterize the tractive force required for driving, which is closely related to speed limit and road adhesion characteristics. It can be expressed as equation (7) on flat pavement.
Global planning gravitation is designed to ensure that the traffic efficiency of intelligent vehicle. Vehicle will accelerate on a clear road without collision threat and achieve the force balance after the speed of vehicle reaches the road limit. After achieving balance, vehicle speed will be constant until the road speed limit changes or collision risk exists. When obstacles appear, global planning gravitation will be decided by the collision threat level. On the condition that collision threat level is 1, global planning gravitation will only provide the force to keep vehicle running at current speed and when collision threat level is 2, global planning gravitation will not provide any force

where
2. Lane-changing gravitation: Lane-changing gravitation is designed to help vehicle change lane when forward obstacles affect driving efficiency. When

where
Artificial repulsion modeling
Artificial repulsion represents environmental factors that have repulsive effect on vehicle to help it avoid obstacles (vehicles, pedestrians, shrubs on both sides of the road, etc.), obey traffic rules (traffic lights, traffic signs, etc.), and satisfy vehicles constraints (dynamics, kinematics). They are mainly divided into forward obstacle repulsion, lateral obstacle repulsion, and traffic rules repulsion.
Forward obstacle repulsion: Forward obstacle repulsion is invited to characterize the impact of forward obstacle, which can avoid or reduce the damage caused by collision. Model is shown in equation (10)

where
2. Sensor occluded scenes repulsion: Sensor occluded scenes repulsion is invited to prevent collision to obstacle in occluded scenes. Decision is made based on boundary motion of occluded scenes to control deceleration of the vehicle, so as to ensure that the vehicle can avoid traffic accidents caused by obstacles appearing in occluded scenes suddenly.
The virtual repulsion is designed based on information of distance between the occluded scenes boundary and vehicle, the vehicle speed, and the road adhesion coefficient

where
Co-simulation analysis through Carsim and Simulink
Co-simulation analysis through Carsim and Simulink are carried to verify effectiveness of the proposed algorithm. 24,25
Simulation of active collision avoidance through braking
Parameters of the simulation are presented in Table 2.
Simulation parameters for simulation of active collision avoidance through braking.

Vehicle is accelerated from standstill until the vehicle speed is 40 km/h. Collision avoidance algorithm based on improved artificial potential field model and the active collision avoidance system based on collision time are applied to the active collision avoidance control. Results are shown in Figures 6 to 11.

Vehicle acceleration based on improved artificial potential field.
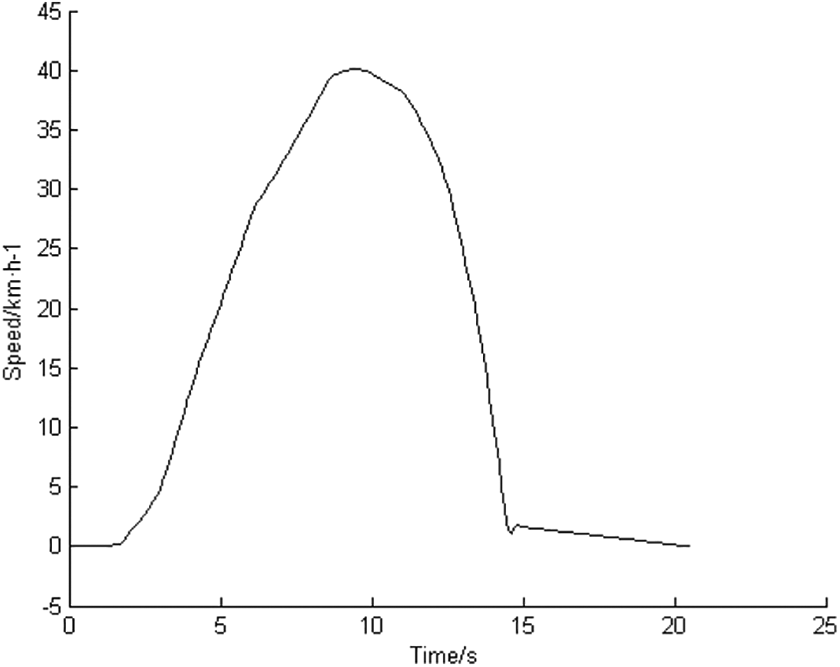
Vehicle speed based on improved artificial potential field.

Distance from obstacle based on improved artificial potential field.

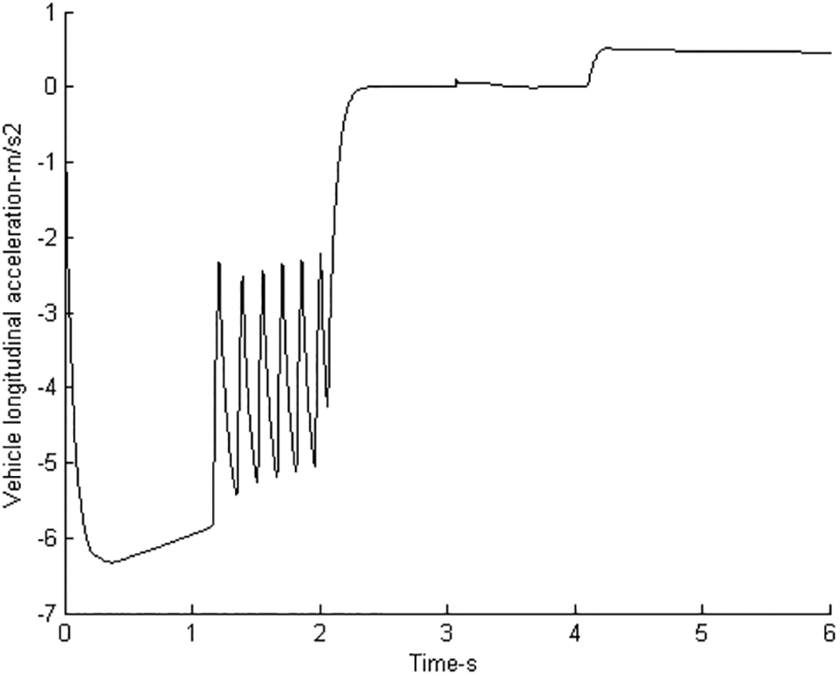
Vehicle acceleration based on collision time.

Vehicle speed based on collision time.

Distance from obstacle based on collision time.
Collision avoidance algorithm based on improved artificial potential field: As shown in Figures 6 to 8 for active collision avoidance algorithm based on the improved artificial potential field method, vehicle start braking at the distance of 15.3 m from the obstacle, and the braking deceleration increased continuously during the process. The maximum braking deceleration is 5.47 m/s2, and the braking length is 14.1 m.
Collision avoidance algorithm based on collision time: As shown in Figures 9 to 11, for active collision avoidance system based on the collision time, vehicle starts braking at the distance of 21.3 m from the obstacle, the maximum braking deceleration is 6.49 m/s2, and the braking distance is 20.8 m. The whole barking process consists of two sections.
It can be seen that the active collision avoidance algorithm based on the improved artificial potential field method has better performance on comfort and efficiency.
Simulation of active collision avoidance through lane changing
Parameters of the simulation are listed in Table 3.
Simulation parameters for simulation of active collision avoidance through lane changing.

Ssf : initial distance of front obstacle on adjacent lane; S sb: initial distance of rear obstacle on adjacent lane.
Results of co-simulations based on the proposed algorithm and collision time algorithm are shown as below:
Collision avoidance algorithm based on improved artificial potential field: As shown in Figures 12
to 14, vehicle controlled by collision avoidance algorithm based on improved artificial potential field can complete lane changing at 4.1 s. In the whole collision avoidance process, the minimum vehicle speed is 81.5 km/h and the maximum deceleration is 6.4 m/s2. Distance from obstacle on current lane based on improved artificial potential field. Vehicle longitudinal speed based on improved artificial potential field. Vehicle longitudinal acceleration based on improved artificial potential field.

Collision avoidance algorithm based on collision time: Time threshold of collision time is set to 3 s and lane-changing time is set to 5 s. 26,27
As shown in Figures 15 to 17, vehicle controlled by collision avoidance algorithm based on collision time can complete lane changing at 6.1 s. In the whole collision avoidance process, the minimum vehicle speed is 42.1 km/h and maximum deceleration is 10.6 m/s2.

Distance from obstacle on current lane based on collision time.
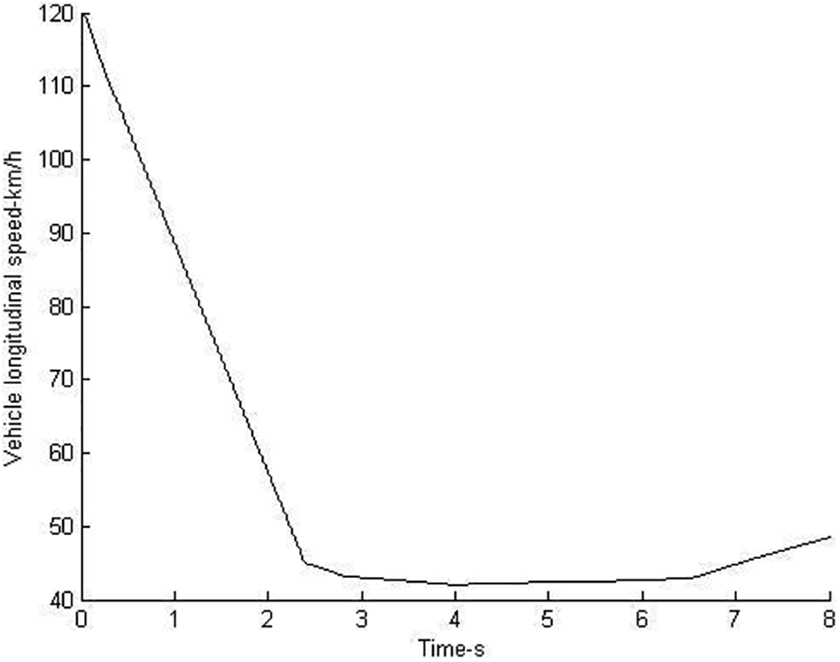
Vehicle longitudinal speed based on collision time.
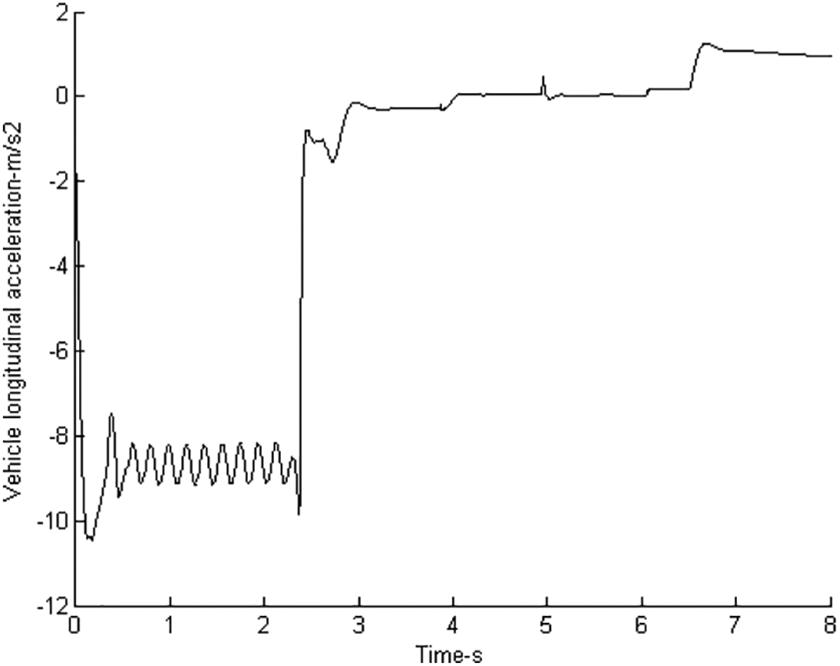
Vehicle longitudinal acceleration based on collision time.
It can be seen that the safety distance model proposed can provide more specific front and lane-changing safety judgment. Thus, improved artificial potential field model based on the safety distance model can improve traffic efficiency by more reasonable vehicle control, making the active collision avoidance method proposed in this article safe, efficient, and comfortable.
Discussion and conclusion
In this article, an active collision avoidance based on improved artificial potential field is proposed. Firstly, a longitudinal safety distance model based on analysis of braking process and a lane-changing safety spacing model based on minimum time of lane-changing under the constraint of sideslip angle are presented; secondly, an improved artificial potential field method is introduced, which represents the influence of environmental information with artificial force; finally, simulation results demonstrate the superior performance of the proposed algorithm over collision avoidance for intelligent vehicle. Results show that the proposed longitudinal safety distance model and lane-changing safety spacing model with more accurate safety judgment can provide reliable and efficient basis for active collision avoidance algorithm. Also, the active collision avoidance model based on improved artificial potential field can achieve collision avoidance in shorter time. Thus, it has better safety and efficiency.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by the National Natural Science Foundation of China (Grant No.51775247, 51305167) and Postgraduate Research & Practice Innovation Program of Jiangsu Province (Grant No.KYCX18_2230).