
Abstract
Serious noise pollution and background interference bring great difficulties to infrared image segmentation of electronic equipment. A novel infrared image segmentation method based on multi-information fused fuzzy clustering method is proposed in this article. Firstly, saliency detection is performed on the infrared image to obtain the saliency map, which determines the initial clustering center and enhances the contrast of the original infrared image. Secondly, the weighting exponent in the objective function is adjusted adaptively. Then local and global spatial constraints are added to the objective function of the fuzzy clustering method, which can reduce the noise and background interference. Finally, the Markov constrained field is calculated according to the initial segmentation result. After that the joint field of fuzzy clustering field and the Markov random field is constructed to obtain the optimized segmentation result. The algorithm is evaluated on the infrared images of electrical equipment, and the experimental results show that the proposed method is robust to noise and complicated background. Compared with other methods, the proposed method improves the average segmentation accuracy and T measure by about 10% and 13%.
Keywords
Introduction
In recent years, substation inspection is gradually becoming unmanned, and robots have gradually been applied to substation inspections. 1 However, most of the existing researches on inspection robots focus on the field of automatic control, and there still are relatively few researches on intelligent information processing. 2,3 As a result, the application of existing inspection robots in substations is mostly limited to information collection. In recent years, information processing on the robot platform is becoming the key to electrical equipment intelligent inspection. Faults of electrical equipment are the main reasons for large-scale blackouts. Therefore, faults of electrical equipment inspection are one of the important problems that can be solved by information processing of robot platform.
It is known that electrical equipment has heating characteristics, which makes the use of infrared image processing technology for intelligent fault detection of electrical equipment to become the future development trend. 4 Accurate segmentation is the key to target recognition and analysis of infrared images, abnormal heating analysis of electrical equipment, and image registration between infrared and visible. The “image segmentation” mentioned in this article means the separation of the target area (electrical equipment area) from the background. Infrared image reflects the infrared radiation distribution of target and background in the scene. However, most of the infrared images provided by the imaging system will be seriously disturbed by background noise and have the characteristics of low signal-to-noise ratio, blurred boundary, and uneven gray distribution, which greatly increases the difficulties of analysis and target detection in infrared image. 5 –7 Therefore, how to segment infrared targets quickly and accurately is a challenging task.
Many infrared image segmentation methods have been proposed to improve the segmentation accuracy, which could be classified into six categories, such as threshold, 8,9 mean shift, 10 Markov random field (MRF), 11,12 active contour model, 13 –15 fuzzy C-means (FCM) clustering, 16 –18 and neural networks (NNs). 19,20 The methods based on threshold easily produce misclassification in the image with small gray differences because the spatial information is not taken into consideration. 21 The methods based on mean shift focus on local region merging. If the contrast is low, it may merge the target pixels into its neighborhood background. 22 The methods based on MRF have rigorous mathematical theory and strong scalability. However, they may fall into local optimum, so an appropriate initial value is needed. 23 The methods based on active contour model can deal with topological change automatically and have the advantage of capturing local deformation, but it is sensitive to the initial curve. 24 The methods based on NNs require a large amount of infrared images for training, and the segmentation accuracy is related to the amount of image involved in the training. 20 In recent years, pulse-coupled NN has been used for infrared image segmentation. In the model, several parameters were usually required to properly set for adjusting the behavior of neurons. However, undesired behavior may occur owing to inappropriate parameters setting. 25,26
In this article, we present a new infrared image segmentation method to segment infrared images of electronic equipment more accurately. The method in this article is applied to a self-developed inspection robot system. And the system has achieved good results in actual electrical equipment fault detection. The main contributions of this article are as follows: A saliency detection algorithm is proposed to obtain the saliency map of the infrared image. There are two advantages of saliency detection processing. On the one hand, the initial clustering center can be determined to reduce the number of iterations. On the other hand, the original image can be enhanced to improve the performance of segmentation. A multi-information fused fuzzy clustering method is proposed. The local and global spatial constraints are introduced to suppress noise and background interference in electrical equipment infrared image, respectively. In addition, we adopt two strategies to reduce time consumption, one is to introduce the histogram, the other is to redefine the distance between pixels and cluster centers. The joint field of fuzzy clustering field and MRF is constructed to optimize the infrared image segmentation results, which can improve the accuracy of infrared image segmentation.
The rest of the article is organized as follows. The second section briefly introduces the fuzzy clustering method. In the third section, a new infrared image segmentation method is proposed. Experimental results and analysis are presented in the fourth section. We conclude the article in the last section.
Related work
The method based on FCM clustering 27 adopts unsupervised soft partitioning, which divides sample points into classes with different membership degrees. It can truly show the uncertainty and fuzziness of the infrared image. This method is widely used in infrared image segmentation. 28,29 Ahmed et al. 30 added the neighborhood mean to the objective function and proposed the bias-corrected FCM (BCFCM) algorithm, which obtained a good segmentation result. However, it is time-consuming to calculate neighborhood relationship. To reduce the computational complexity of the BCFCM algorithm, Chen and Zhang 31 added the neighborhood spatial constraint to the objective function and proposed a series of methods based on BCFCM, but it could not adaptively determine the key weight factor that maintains the relative balance between the original image and the filtered image. Krinidis and Chatzis 32 proposed the fuzzy local information C-means (FLICM) algorithm, which introduced a new fuzzy variable that was not controlled by any parameters in the objective function. The method obtained better anti-noise performance and improved the segmentation accuracy. Zhang et al. 33 proposed a non-local information fuzzy clustering (NLFCM) algorithm. By introducing pixel correlation into the fuzzy factor, the damping degree can be estimated accurately, the performance of anti-noise can be improved, and the image artifacts can be suppressed. This method is also expensive in terms of computational load. Qiu et al. 34 suggested a novel algorithm for fuzzy segmentation by introducing two fuzzifiers and a spatial constraint in the membership function. Kannan et al. 35 introduced a robust non-Euclidean distance measure for the objective function to enhance the robustness of the original FCM clustering algorithm and to reduce noise and outliers. Fang et al. 36 proposed an adaptively regularized kernel FCM (ARKFCM) with spatial constraints algorithm for image segmentation. The ARKFCM algorithm first transforms the pixel intensities into a higher dimensional space using a kernel trick and then performs classification on the transformed data. Lu et al. 37 proposed particle swarm fusion with FCM, and it used the particle swarm optimization algorithm to update the clustering center of FCM to obtain the global optimal value. Guo et al. 38 took the input image as the guidance prior and proposed the image-guided FCM for image segmentation algorithm; it has the capability in noise suppression and edge-preserving smoothing. However, the iterative convergence of the algorithm is slow.
Most of the methods discussed above affected by serious noise and background interference. Although the improved FCM algorithms mentioned above have greatly improved the segmentation result, there are still some shortcomings. (a) The initial cluster center and weighting exponent is not self-adaptive determination. (b) Additional constraints increase the computational complexity. (c) The existing improved FCM algorithms ignore the background interference. In order to solve these problems, a novel infrared image segmentation method is proposed in this article, which can effectively reduce the noise and the background interference in infrared images of electrical equipment.
The proposed method
The characteristics of electrical equipment infrared image increase the difficulty of electrical equipment fault detection, and FCM algorithm is a suitable method to solve the problem. However, the FCM algorithm and its improved methods have the shortcomings of non-self-adaption, high complexity, and background interference neglect. In order to make up the shortcomings and improved the accuracy of equipment fault detection, a new infrared image segmentation algorithm is proposed in this article, which mainly includes the following steps. Firstly, the saliency detection is performed in the original infrared image. According to the saliency map, the initial clustering center can be determined and the original image can be enhanced. Secondly, the initial segmentation result is obtained by multi-information fused fuzzy clustering method. Finally, a joint field of fuzzy clustering field and MRF is constructed to optimize the segmentation result. The flow chart of the proposed method is shown in Figure 1.
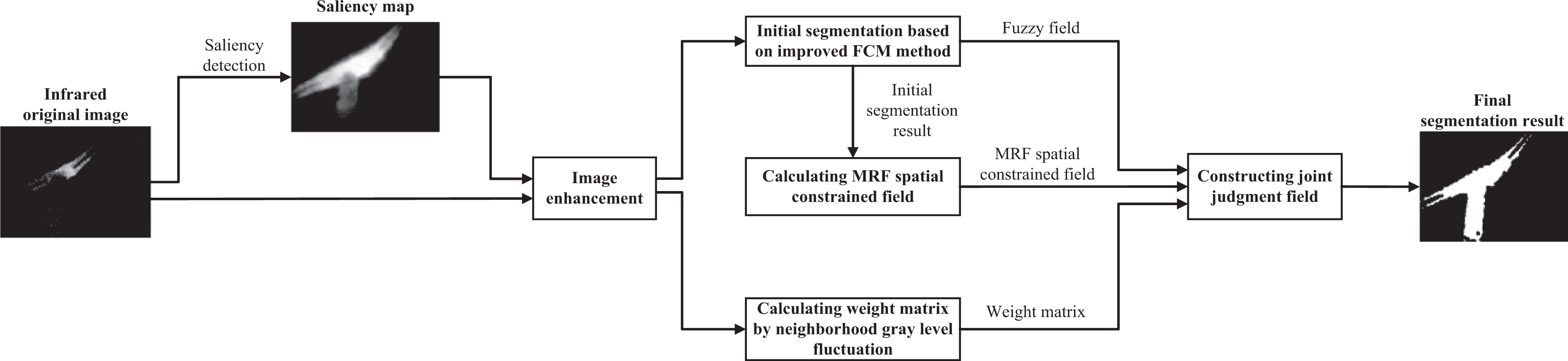
The flow chart of the proposed method.
Initialization of clustering parameters
The sensitivity to the initial clustering center and low contrast of original infrared images both will affect the segmentation result. In this section, a saliency detection algorithm is proposed to obtain the saliency map, which can determine the clustering center and enhance the original infrared image. Due to the electrical equipment, infrared image has the characteristics of blurred edge, electrical equipment intensity salience, and serious noise pollution. Therefore, we mainly calculate the intensity saliency of the electrical equipment. In addition, the spatial constraints are used to suppress noise interference. We define a dissimilarity measure between a pair of pixels as

where

where
The initial clustering center has a great influence on the convergence speed and segmentation accuracy of the algorithm. The original FCM algorithm initializes the cluster center randomly, then updates the membership matrix and the cluster center iteratively. In this article, the initial clustering centers can be obtained according to the statistical characteristics of the saliency map.
According to the saliency map, the original image is divided into several regions, and each region can obtain a histogram. In each histogram, a cluster center is determined according to the maximum density criterion, and the density is calculated as follows:

where c is the number of clusters. W is the size of the window, the window slides from left to right on the histogram, and the sliding step is p. Cluster center initialization strategy.

In order to improve the infrared image quality, we use the saliency map to enhance the infrared image. The enhanced image

where I is the original infrared image, S is the saliency map, and
The proposed algorithm is compared with AC,
39
HC,
40
LC,
41
RBD,
42
SWD,
43
and FCB.
44
The experimental results are shown in Figure 3, Figure 4, and Table 1. In Table 1, we adopt mean absolute error (MAE) score and running time to compare the performance of competing algorithms. To illustrate the evaluation metric MAE, in the following statement, S represents the detected saliency map and G represents the human-labeled binary ground truth;

Saliency detection with different methods: (a) original infrared image, (b) AC, (c) HC, (d) LC, (e) RBD, (f) SWD, (g) FCB, and (h) Proposed.
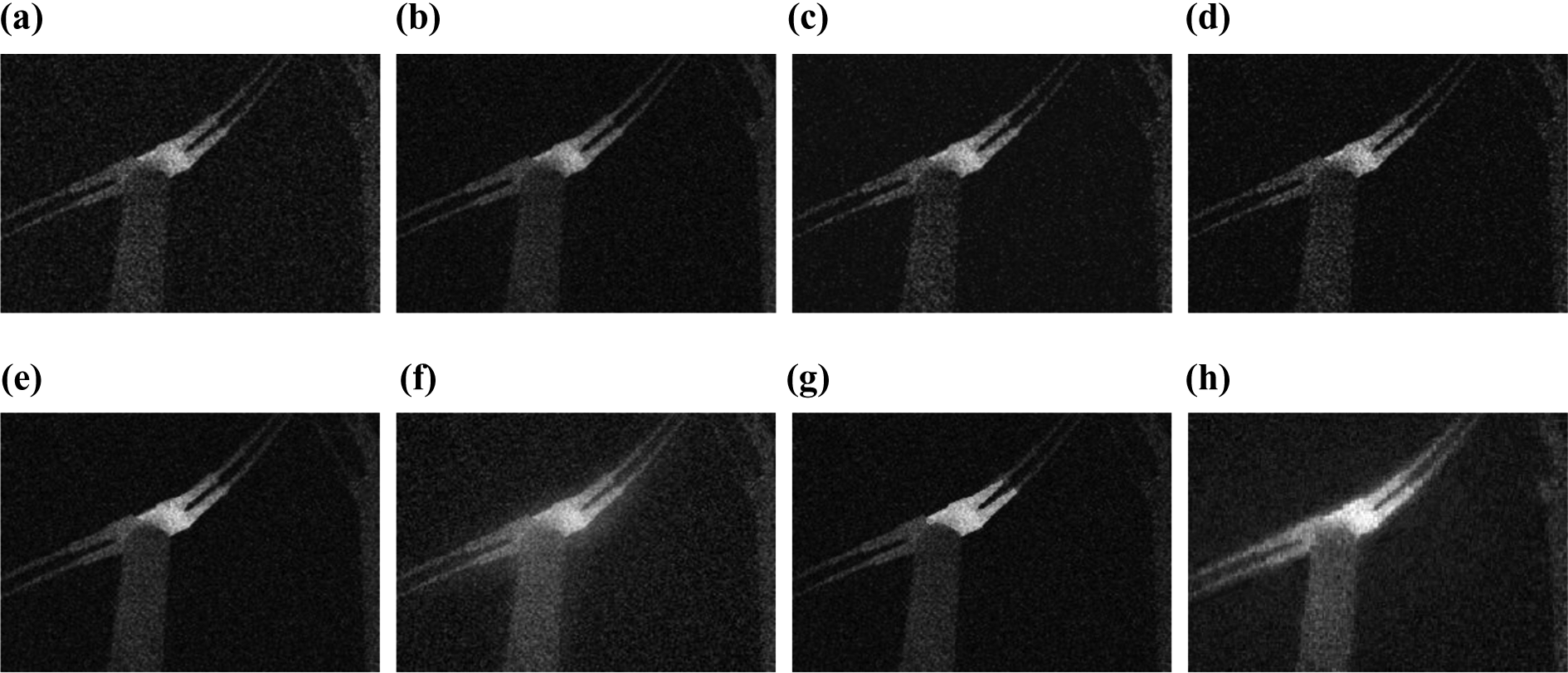
Image enhancement with different saliency detection methods: (a) Original infrared image, (b) AC, (c) HC, (d) LC, (e) RBD, (f) SWD, (g) FCB, and (h) Proposed.
Running time of different saliency detection methods.

MAE: mean absolute error.
As can be seen from the experimental results that the HC, LC, RBD, and SWD methods take less time than our method, but the MAE values of these methods are higher than the proposed method. Compared with the other remaining methods, our method is faster and has lower MAE value. Our method is designed with computational complexity and infrared image characteristics in mind. The experimental results show that our algorithm is more suitable for infrared images with larger interference.
FCM algorithm with local spatial constraints
The fuzzy clustering algorithm based on a certain norm and clustering prototype classifies unlabeled data by minimizing the objective function. 45 The clustering criterion function is defined as

where c is the number of clusters, and m is the weighting exponent, which can control the fuzzy degree of the clustering result.
In order to suppress noise interference, an intelligent control factor


where xj
is the neighborhood pixel located in the window
FLICM calculates the membership degree of each pixel and introduces additional spatial constraints, so the computational complexity of the algorithm is high. In this article, the gray level is introduced to replace the pixel for compressing the data space. The gray level of the image ranges from 0 to 255. In the preprocessing stage, the gray level to which each pixel belongs is counted. Each gray level needs to be calculated only once in each iteration. Thereby, the computational complexity of fuzzy clustering method is reduced.
To achieve the convergence of the algorithm with fewer iterations,

In this case, the fuzzy membership degree of the pixels will be changed significantly, which accelerates the method’s convergence. Here, we introduce the gray level and local spatial constraint

where N is the total number of gray level in the image.
As shown in Figure 5(a), we chose a

FCM algorithm with global spatial constraints
Most of the existing improved FCM algorithms introduce neighborhood space constraints and various prior information to improve the segmentation result, but these algorithms do not consider the global spatial constraints. The classification of pixels in the image is not only related to the neighboring pixels but also has a certain relationship with the distance of the target. The closer the distance between the pixel and the target center is, the greater the probability of the pixel belonging to the target is. In addition, the weighting exponent m is determined by experience in other methods. If m is too large, it will result in excessive fuzzy. On the contrary, fuzzy clustering degenerates into hard clustering. On the one hand, we consider the distance between the pixel and the target center to suppress the background interference. On the other hand, the penalty term for the weighting exponent m is added to prevent m from being too large or too small, and updated adaptive iteratively.
We define a global weight factor as follows:

where
The variance matrix of saliency map and the Chebyshev inequality are combined to select the appropriate threshold for determining the target location, so as to estimate the target center

where

where
According to the Chebyshev inequality, the threshold is chosen to be
The improved FCM algorithm objective function is defined as follows:

where
The membership, cluster center, and weighting exponent can be updated iteratively by minimizing the objective function in equation (14), formalized as



Through equation (15), the membership matrix U and the initial segmentation result Y can be obtained.
Infrared image segmentation algorithm with MRF
Local and global spatial constraints can improve the performance of anti-noise and background suppression. Nevertheless, the constraints can’t solve the problem of the edge roughness due to the noise interference.
The image segmentation algorithms based on MRF 46 make full use of the image spatial information as a priori knowledge, which can obtain a good edge segmentation result. Nevertheless, these segmentation methods are prone to result in oversegmentation. In order to solve this problem, we combine the fuzzy clustering field and the MRF field to obtain the joint field, which can be defined as

In equation (18), U is the fuzzy field, which is also the membership matrix obtained by the section “FCM algorithm with global spatial constraints.” P is the Markov space constraint field, which will be introduced in detail below.
where xk
is a neighborhood pixel of the center pixel xj
in the image.
The Markov space constraint field is defined as

where Y is the initial segmentation result.

where
The steps of segmentation can be summarized as Algorithm 1.
Substation inspection robot system
We have developed a prototype of a substation electrical equipment inspection robot, as shown in Figure 6. The robot architecture is shown in Figure 7. The algorithm proposed in this article has been integrated into the system and has achieved very good results in actual electrical equipment fault detection.

The prototype of inspection robot. (a) External structure and (b) Internal structure.

The architecture of inspection robot.
The power module outputs 12 V voltage, then the voltage is converted to the voltage required by different equipment through the voltage conversion module for power supply. The data acquisition module includes an infrared camera, a visible camera, temperature sensor, and Beidou positioning sensor. The information collected by each sensor is transmitted to an industrial computer. Then the industrial computer is used to detect the fault of electrical equipment according to the collected image information. Our system deals with one frame in every 2 s for detection instead of every frame of the video stream. The performance of the processor used in our robot system is better than that of my personal computer. Therefore, the algorithm runtime in the experimental part of the article can only be used as a reference. And the hardware parameters of my personal computer are described in detail in the fourth section.
In terms of robot control methods, we plan the inspection path of the robot in advance. And the control method of robot is referred to Zhao et al. 3 The robot will automatically detect the position information by the Beidou positioning sensor and check whether it deviates from the predetermined path. If it deviates, the robot’s direction of movement will be adjusted to be consistent with the predetermined path. Besides, in order to ensure that all the equipment images captured by the cameras can be detected, the speed of the robot is set to 1.5 m/s.
Experimental results and analysis
The experimental environment is MATLAB R2014b (MathWorks, Natick, MA, USA), with Inter(R) Core i5, 2.60 GHz CPU, and 8GB memory. In order to verify the performance of the proposed method, we made an infrared image data set named HHU-IR150 data set and perform the algorithm on it. The HHU-IR150 data set includes 150 electrical equipment infrared images, all of which were taken at the real scene of substations. The experimental results are compared with the clustering methods and other segmentation methods. The clustering methods include FCM, 27 FLICM, 32 PSOFCM, 37 NLFCM, 33 and ARKFCM, 34 and the other methods include MFIS, 19 TFSSI, 47 RFLSM, 48 and GFACM. 49 The experimental results are compared with the ground truths to acquire quantitative analysis of the segmentation performance.
In this article, the quantitative analysis of the segmentation results is based on the accuracy P and the recall rate R. Based on the above discussion, the accuracy and recall rate can be calculated as shown in the following equations


Among them, AR
is the ground truth, and the ground truth is obtained manually. First, the infrared image is enlarged by Photoshop software and then the target pixels and background pixels are manually labeled. AS
is the area segmented by the proposed method.
The comprehensive evaluation index T can be expressed as

Among them,
Parameter settings
In this section, we examine the performance of the proposed method over the selection of parameters. Experiments are conducted on the HHU-IR150 data set. In the process of parameter determination, we randomly divided the data set into two parts at a ratio of 8:2, containing 120 and 30 images, respectively. The first part is used to learn the parameters, and the second part is used to test the parameters. In order to avoid accidental errors, we perform the above process 10 times and take the parameter corresponding to the best test result as the final parameter. Specifically, we first investigate the performance of the proposed method over the coefficient α, weighting factor
As we can see from Figure 8(a), when the parameter α is 3.4, the segmentation result is best and the average T metric is the highest. If the value of α is larger or smaller, the segmentation accuracy will decrease. As we can see from Figure 8(b) that the segmentation result is best as the value of

Sensitivity analysis of parameters on the HHU-IR150 data set: average T metric curves of the segmentation results with different values of (a) the coefficient α, (b) the weighting factor
Other parameter settings.

Performance of each step
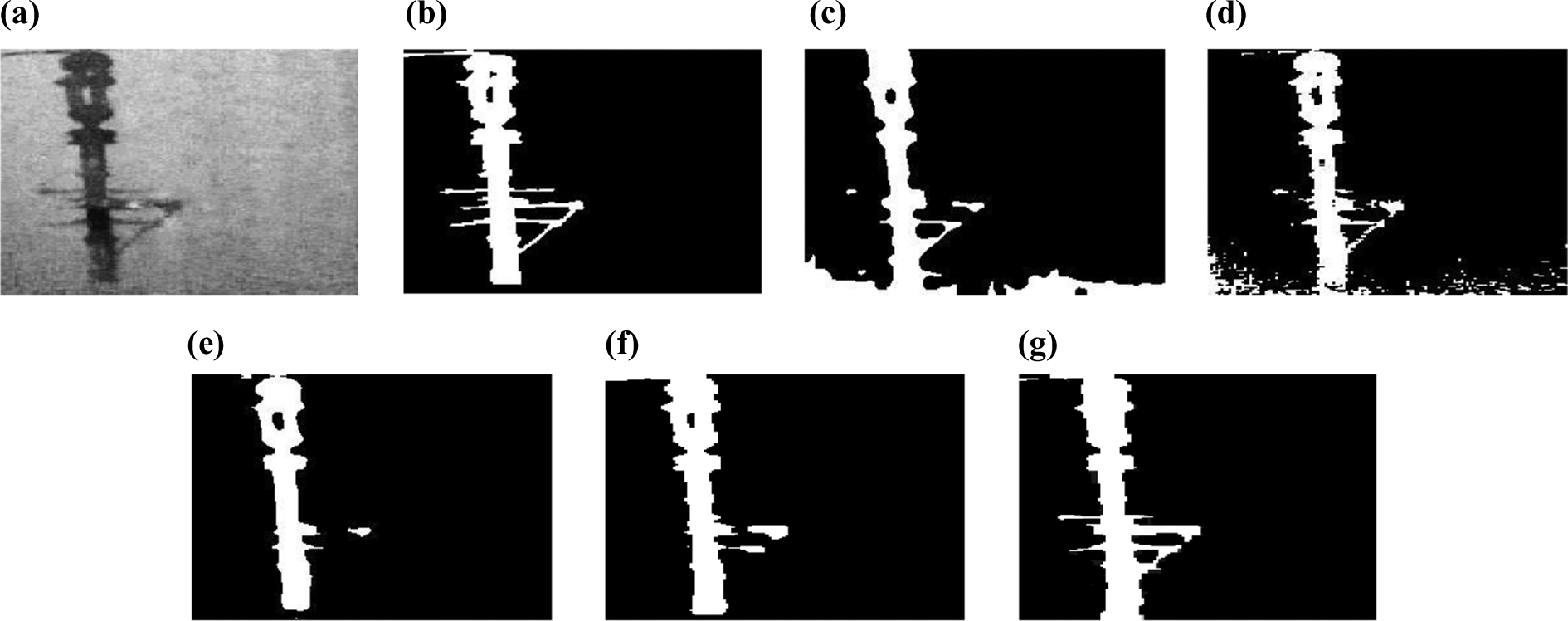
We perform experiments to obtain a better understanding of each step work. We first run the system only based on FCM. After that we add infrared image enhancement. Then we add local spatial constraint. Then we add global spatial constraint. Finally, we combine Markov constraint field to optimize the segmentation result. This allows us to show the contribution of each step work, and the results of the experiment are shown in Figure 9. Experimental results show that the proposed method has good performance in the electrical equipment infrared image which has the characteristics of background interference, serious noise pollution, low signal-to-noise ratio, blurred boundary, uneven gray distribution of the target, and background.

Segmentation result after each step. (a) Original infrared image, (b) ground truth, (c) FCM, (d) adding infrared image enhancement, (e) adding local spatial constraint, (f) adding global spatial constraint, and (g) combining Markov constraint field. FCM: fuzzy C-means.
Table 3 gives the certain data of the segmentation results after four steps. The T measure after all steps is 88%, and it is increased by 22% compared with the FCM method. From these data, it can also be seen that each step of our improvement has a beneficial effect on the final segmentation result.
The segmentation results after four steps in the proposed method.a

FCM: fuzzy C-means.
a Step1 means adding image enhancement, step2 means adding local spatial constraint, step3 means adding global spatial constraint, and step4 means combining Markov constraint field. The bolded values represent the best values.
Comparison with clustering methods
In this article, several representative images are selected for experiments to illustrate the effectiveness of the proposed algorithm. In Figure 10, the first column is infrared images from image1 to image9. The bottom of image1 is heavily polluted by noise. Image2 has background interference due to the reflection of sunlight from the ground and clouds. Image3 mainly includes several disconnectors. The bottom of the image is seriously polluted by noise. Image4 contains more details. The image5 mainly includes a lightning arrester and there is a part of the tree on the right. Besides, there is nonuniform heat distribution in lightning arrester. There are sky background interferences in the image6, which may be caused by sunlight reflection. In the image7, the noise is serious and the bottom of the image is dark. In the image8, the detail information of the target is complicated, and there is interference which is caused by the sky background. In the image9, the target accounts for a large proportion in the image. The cross shape in the target caused by a tag which attaches to the device and blocks thermal radiation. Due to the characteristics of infrared images, all images contain varying degrees of noise. Figure 10(b) to (g) is the segmentation result obtained by FCM, FLICM, PSOFCM, NLFCM, and ARKFCM algorithms.

The comparison with different clustering methods for infrared image segmentation results (277
The FCM algorithm does not take into account the influence of neighborhood pixels and has weak ability to suppress noise. FLICM, PSOFCM, NLFCM, and ARKFCM algorithms take into account the influence of neighborhood and non-neighborhood pixels in different forms, and can suppress different degrees of noise, but for infrared images with strong noise and background interference, the segmentation result is not good. The proposed algorithm firstly uses saliency map to find better initial cluster centers and enhance the original infrared image, then the improved FCM algorithm introduces the local and global spatial constraints to suppress the interference of noise and background effectively; finally, the segmentation results are optimized by joint field combining fuzzy clustering field with MRF. Overall, the proposed algorithm obtains the better subjective segmentation results compared with other segmentation algorithms.
As can be seen from the first and second rows of Figure 10 that the FCM, FLICM, PSOFCM, and NLFCM algorithms misclassify a large number of noise pixels into background, although the ARKFCM algorithm has better suppression effect on noise, it has poor segmentation effect on details. The proposed method can suppress noise and background interference and can obtain more accurate segmentation result. It can be seen from the third row of Figure 10 that the FCM, FLICM, PSOFCM, NLFCM, and ARKFCM algorithms cannot filter out the interference of the background on the bottom of the image. We can see from the fourth row of Figure 10 that our proposed method has a better segmentation effect on details and obtains more accurate segmentation result. It can be seen from the fifth row of Figure 10 that the FCM and FLICM algorithms have a poor suppression effect on noise. Although the PSOFCM, NLFCM, and ARKFCM algorithms have better suppression effect on noise, they cannot filter out the interference of the background on the right side of the image. The proposed method can suppress noise and background interference and can obtain more accurate segmentation result. As can be seen from the sixth row of Figure 10 that the FCM, FLICM, PSOFCM, and ARKFCM algorithms can’t eliminate the interference of the sky background, the phenomenon of oversegmentation has appeared in various degrees. Although the NLFCM algorithm can better suppress the interference of the sky background, the phenomenon of undersegmentation occurs, and the target segmentation is incomplete. The proposed method can not only obtain the accurate target segment result but also suppress the sky background interference. We can see from the seventh row of Figure 10 that the FCM, FLICM, PSOFCM, NLFCM, and ARKFCM algorithms divide the noise and the darker area at the bottom of the image into target incorrectly, which results in different degrees of oversegmentation. The proposed method has good performance on strong noise and has an accurate segmentation result. It can be seen from the eighth row of Figure 10 that the FCM algorithm has poor ability to suppress sky background interference. And that, a large number of target pixels are misclassified into background. Although the FLICM, PSOFCM, NLFCM, and ARKFCM algorithms have strong ability to suppress background, they still lose a large number of target details. The proposed algorithm can preserve the details of the target and suppress the interference of the background, so as to get a better segmentation result. It can be seen from the ninth row of Figure 10 that the FCM, FLICM, and PSOFCM algorithms have poor performance in the edge segmentation. The NLFCM and ARKFCM algorithms have a smooth result around the edge; nevertheless, a serious undersegmentation phenomenon occurs. The result of the proposed method shows that the target segmentation result is more complete and the segmentation result of the edge is better. As can be seen from the segmentation results, the proposed algorithm has better segmentation results than other methods.
Figure 11 shows the precision, recall, and T measure of segmentation results obtained by six clustering algorithms. It can be seen that the proposed segmentation algorithm has higher precision and T measure than FCM, FLICM, PSOFCM, NLFCM, and ARKFCM algorithms.
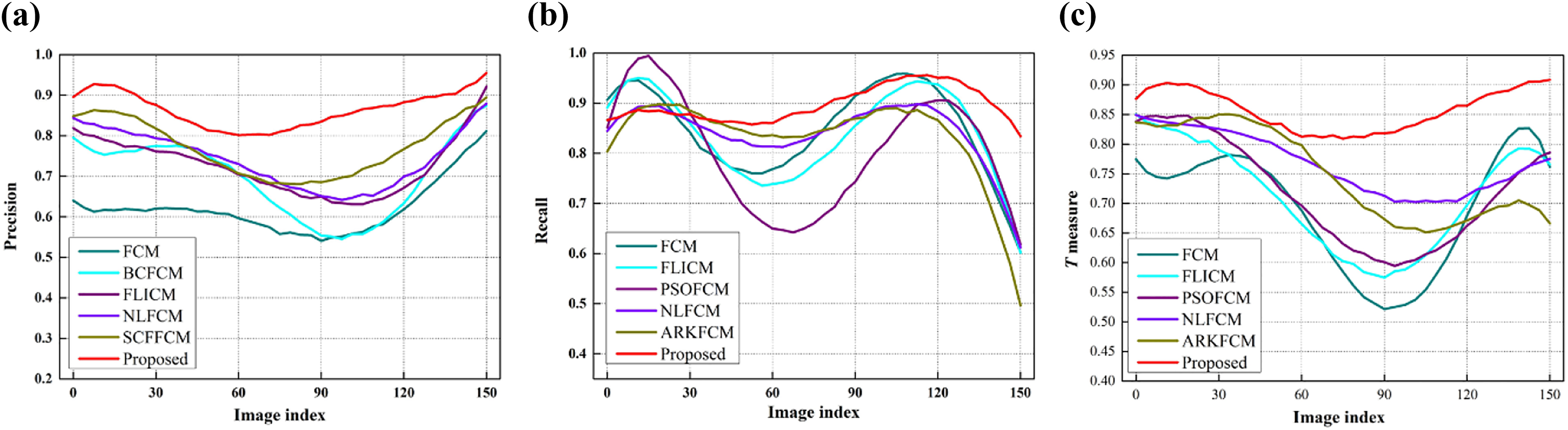
Evaluation of different clustering methods. (a) Precision, (b) recall, and (c) T metrics.
Table 4 gives the certain data of the three indicators among the six clustering algorithms. It can be seen that the proposed algorithm can obtain higher average accuracy, recall rate, and T value than other clustering algorithms. It can be seen from the above analysis that the proposed method has better segmentation result and stronger robustness in infrared image segmentation compared with other methods.
The analysis and comparison of segmentation results in different infrared images.

FCM: fuzzy C-means; FLICM: fuzzy local information C-means; ARKFCM: adaptively regularized kernel FCM. The bold-faced values represent the maximum value.
In addition, we consider and measure the running speed of the algorithm. Table 5 lists the computational times for FCM, FLICM, PSOFCM, NLFCM, ARKFCM, and the proposed method. As can be seen from Table 5, the proposed algorithm has a greater improvement in the running speed than the FLICM, PSOFCM, NLFCM, and KWFLICM algorithms. In conclusion, the proposed algorithm can improve the segmentation accuracy and ensure the algorithm speed.
Average running time of different clustering methods.

FCM: fuzzy C-means; FLICM: fuzzy local information C-means; ARKFCM: adaptively regularized kernel FCM.
Finally, we consider the effect of image size on computation time. We scaled the length and width of image 4 by 0.8, 1.0, 1.2, 1.4, 1.6, 1.8, and 2.0 times simultaneously and experimented with the scaled image. The experimental results are shown in Table 6. In other clustering algorithms, the complexity of the algorithm is related to the number of pixels. The larger the size of the image, the longer the computational time of the algorithm. In our algorithm, the gray level is used instead of the pixel for calculation. The complexity of the algorithm is independent of the number of pixels, so the computational time of the algorithm is less affected by the change of image size.
Running time of different image size.

FCM: fuzzy C-means; FLICM: fuzzy local information C-means; ARKFCM: adaptively regularized kernel FCM.
Comprehensive comparison
In order to further verify the effectiveness of the proposed algorithm, the segmentation results of the proposed algorithm are compared with several other infrared image segmentation such as GFACM and MFIS. In addition, underwater side-scan sonar images have similar characteristics as infrared images, such as serious noise pollution, background interference, low signal-to-noise ratio, and blurred boundary. The underwater side-scan sonar image segmentation algorithms, TFSSI and RFLSM, are chosen to compare with our proposed method. The experimental results are shown in Figures 12 and 13. Figure 12(a) is an infrared image of lightning arrester. It has the characteristics of uneven gray distribution within the target and background interference. As can be seen from Figure 12(b) to (f) that MFIS, TFSSI, and RFLSM methods produce serious undersegmentation phenomenon, the GFACM method divides the background into target incorrectly. The proposed method can eliminate background interference effectively and obtain better segmentation result. Figure 13(a) is an infrared image of circuit breaker. It has the characteristics of serious noise pollution, and the bottom of the image is darker. As can be seen from Figure 13(b) and (f) that the MFIS method can’t eliminate noise effectively, TFSSI method is better than MFIS in noise suppression, but there are still some noises that are misclassified as targets, RFLSM, and GFACM suffer from severe oversegmentation, and the proposed method can obtain a relatively complete target and suppress the interference of noise better. It can be concluded that the performance of the proposed method is superior to other compared method.

The comparison of different methods for lightning arrester infrared image segmentation results: (a) original image, (b) ground truth, and (c) to (g) segmentation results using the MFIS, TFSSI, RFLSM, GFACM, and the proposed method.
The comparison of different methods for circuit breaker infrared image segmentation results: (a) original image, (b) ground truth, and (c) to (g) segmentation results using the MFIS, TFSSI, RFLSM, GFACM, and the proposed method.
Table 7 compares the segmentation results based on accuracy, recall, and T metrics. It can be seen that the proposed segmentation algorithm has higher average recall, and T metrics compare with other algorithms.
The analysis and comparison of segmentation results.

The bold-faced values represent the maximum value.
Considering the fairness of the comparison with the algorithms TFSSI and RFLSM, we selected two underwater side sonar images for experiments. The experimental results are shown in Figures 14 and 15 and Table 8. It can be seen from the experimental results that the proposed algorithm is better than the algorithms A and B. The proposed algorithm is also applicable to the underwater environment and can be applied to underwater robots in the future.

The comparison of different methods for aircraft underwater side-scan sonar image segmentation results: (a) original image, (b) ground truth, and (c) to (g) segmentation results using the TFSSI, RFLSM, and the proposed method.

The comparison of different methods for human underwater side-scan sonar image segmentation results: (a) original image, (b) ground truth, and (c) to (g) segmentation results using the TFSSI, RFLSM, and the proposed method.
The analysis and comparison of underwater side-scan sonar image segmentation results.
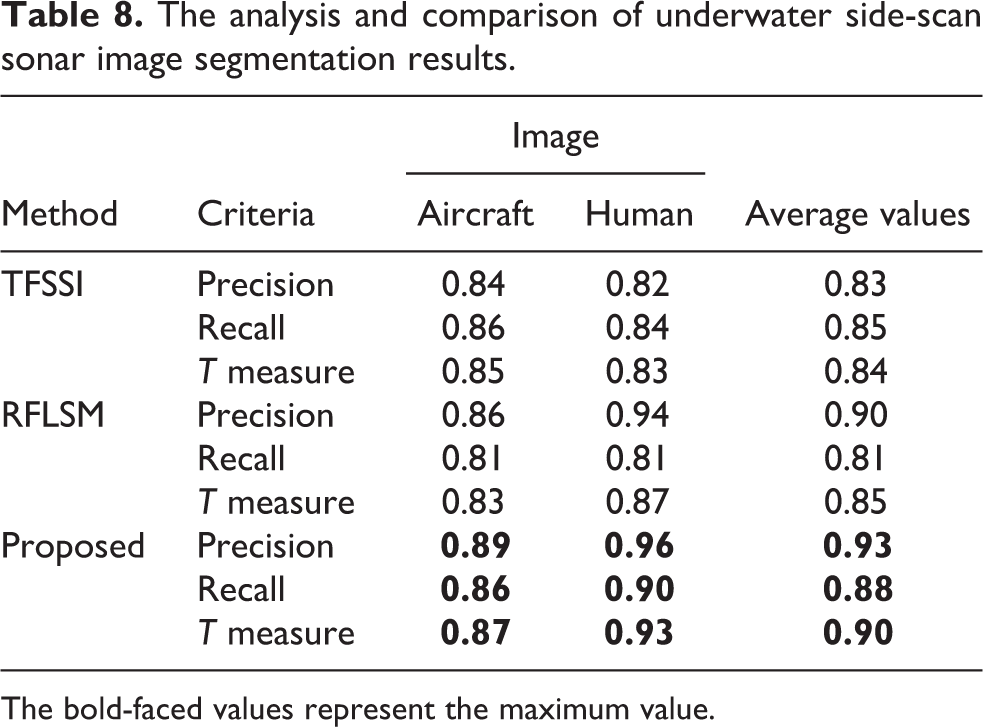
The bold-faced values represent the maximum value.
Conclusion
In this article, we propose a novel infrared image segmentation method based on multi-information fused fuzzy clustering. Because infrared images have low contrast, we use saliency map to enhance the infrared image. Besides, in order to prevent the unstable segmentation results caused by random initialization of clustering centers, the saliency map is adopted to determine the initial clustering centers. In addition, local and global spatial constraints are introduced to suppress noise and background interference in fuzzy clustering. The gray level is introduced to compress the data space, which reduces the computation cost. The distance between pixels and clustering centers is redefined to accelerate the convergence. Finally, MRF is used to optimize the segmentation results. The experimental results show that the proposed algorithm can suppress background and noise interference effectively, and it can not only obtain better segmentation results but also guarantee speed. Compared with other existing methods, the proposed method obtains better segmentation results of infrared image for electrical equipment. Our algorithm needs to be improved in terms of real-time performance. In future work, we plan to use an infrared camera and a visible light camera to form a binocular system. The advantages of visible light images can be used to improve the performance of the algorithm. On the one hand, the visible light image is less interfered by noise, and the image quality can be improved by the idea of image fusion. On the other hand, there is rich detail in the visible light image, which can be utilized to make the algorithm converge in advance.
Infrared image segmentation based on multi-information fused FCM

Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key R&D Program of China (no. 2018YFC0406900), the Key Research and Development Program of Jiangsu Province (no. BE2018092), and the State Grid Jiangsu Electric Power Co., Ltd. Science and Technology Project (no. J2019104).