
Abstract
The tracking control problem for uncertain spatial robot is investigated by means of adaptive terminal sliding mode control in this article. To approximate unknown nonlinear functions of these systems, a neural network model is employed. By using Lyapunov stability theory, adaptive terminal sliding mode controller is given, which guarantees that the tracking error converges to an arbitrary small region of zero and all the signals remain bounded. Finally, numerical simulation is given to confirm the effectiveness of the proposed method.
Introduction
Now, robots have been widely used in modern industrial fields, and these applications need to depend on the control of robots that makes it follow the desired trajectory. But the robots are complex nonlinear dynamical systems with uncertainties, and it is a difficult task to design the control for these systems. In recent years, many results have been acquired in the control field. 1 –10 By applying modern control method, the tracking control problem for robot has been studied in the literature. 11 –15 To achieve high-accuracy tracking performance, the authors designed a robot controller by utilizing sliding mode control’s robustness to approximate uncertainties. 16 –18 To design the controller for robot arms, adaptive command-filtered backstepping methods were given in the study by Pan et al. 19 In the work of Wai and Muthusamy, 20 neural network system was employed to design robot controllers.
In the study by Yang et al., 21 the author developed optimized controller for wheeled inverted pendulum vehicle models. However, the control approach in the study by Yang et al. 21 needs the knowledge of dynamics. In fact, it is inevitable that uncertainty exists in many practical systems, which always affects the control performance of the system. On the other hand, we usually utilize fuzzy systems or neural networks to approximate unknown nonlinear functions. Therefore, approximation-based adaptive fuzzy or neural control was an interesting issue. 22 –30 In the study by Lin et al., 31 an adaptive backstepping controller was devised for an uncertain chaotic system by using the dynamic fuzzy neural network modeling. Based on the neural network learning control methods, convergence for a class of nonlinear systems with functional uncertainties was researched in the study by Pan et al. 32
In many control systems, neural networks are recognized as one of the effective methods to approximate uncertain nonlinearities. In the study by Li et al.,
33
an adaptive neural networks controller was designed for delayed nonlinear systems with unknown hysteresis. By using adaptive neural control methods, the author discussed the synchronization for robotic manipulators in the study by Liu et al.
34
Motivated by above analysis, this article will research a terminal sliding mode (TSM) control for uncertain spatial robot, which doesn’t require prior knowledge about the system. The unknown nonlinear functions of these systems are approximated by using the neural networks. The convergence of the tracking errors in system is obtained based on the Lyapunov function method. The main achievements of this article are as follows. A three-layer MIMO neural network model is introduced, which can be used to estimate unknown parameters of robot system. Our method can be applied to all other nonlinear systems with unknown parameters. The adaptive terminal slide model controller is constructed so that the tracking error converges to a small neighborhood of zero.
The rest of the article is organized as follows. In the second section, some preliminaries about spatial robot and the neural network are described. In the third section, a TSM controller is proposed, which guarantees the convergence of tracking error. The fourth section describes the simulation, followed by conclusion in the fifth section.
Preliminaries
Problem statements
The control problem for three-link spatial robot is considered in this article, and its scheme is shown in Figure 1.

Three-link spatial robot.
The dynamic equations of such system are given by Hu and Lu 35

where
The elements be represented as following

where
Assumption 1
Suppose the symmetric matrix
Assumption 2
For any

Description of the neural network
To approximate unknown continuous nonlinear function, we will using a three-layer MIMO neural network whose structure is depicted in Figure 2.

Neural network structure.
Suppose that there are

in which

Denote

The neural networks (3) will be used to approximate some unknown continuous nonlinear functions

where

Adaptive neural network TSM control design
The objective of this article is to design a TSM control scheme allowing the actual joint position
Define the tracking error as

The following TSM is selected as in the study by Yu et al. 36

where

where
By differentiating

From (1), (7), and (8), the equivalent control law as

Define

and

From Assumption 1, if the matrix

If
By employing neural networks (3), the unknown functions


where ideal approximate parameters


And estimation error as


We assumed that estimation errors are bounded

with
According to (11) and (12), (9) can be rewritten as

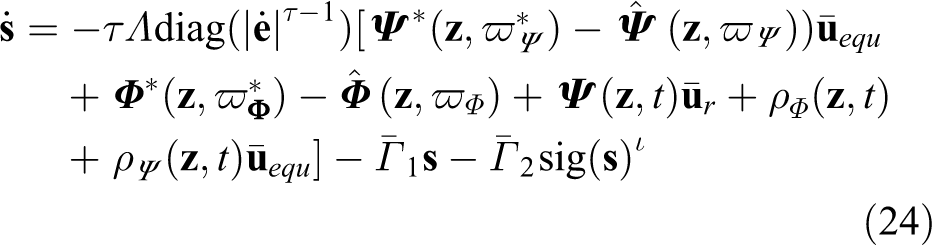
And the proposed controller is designed as

with
Remark 1
It can be seen from (7) that the sliding surface is very simple in this article. Compared with other literature, our TSM control is easier to implement in some complex nonlinear systems.
Theorem 1
For system (1), if Assumptions 1 and 2 are hold, the adaption law are chosen as


where
Proof
Construct the Lyapunov function as following

where
Using (18), (8) can be written as

From (17), (22) becomes

where
Substituting (15) and (16) into (23), we have
The time derivative of

Substituting (19), (20), and (24) into (25), we obtain

From Assumption 1, we known

By multiplying the both side of (27) with

From (26) and (28), we can obtain

Therefore, all signals in the closed loop system are bounded and tracking errors converge to the neighborhood of zero. This completes the proof.
Remark 2
It should be mentioned that the parameters
Simulation studies
The parameter values of the three-link spatial robot are chosen as following:
The desired trajectories of the joints are given by
The simulation results are shown in Figures 3
to 9. In Figures 3
to 5, we can see that the variables of the robotic manipulators track the desired signals quickly, and it is observed that neural networks realize good estimation of uncertain nonlinear systems. Figure 6 shows the time responses of the sliding surface

Tracking curves of link 1.
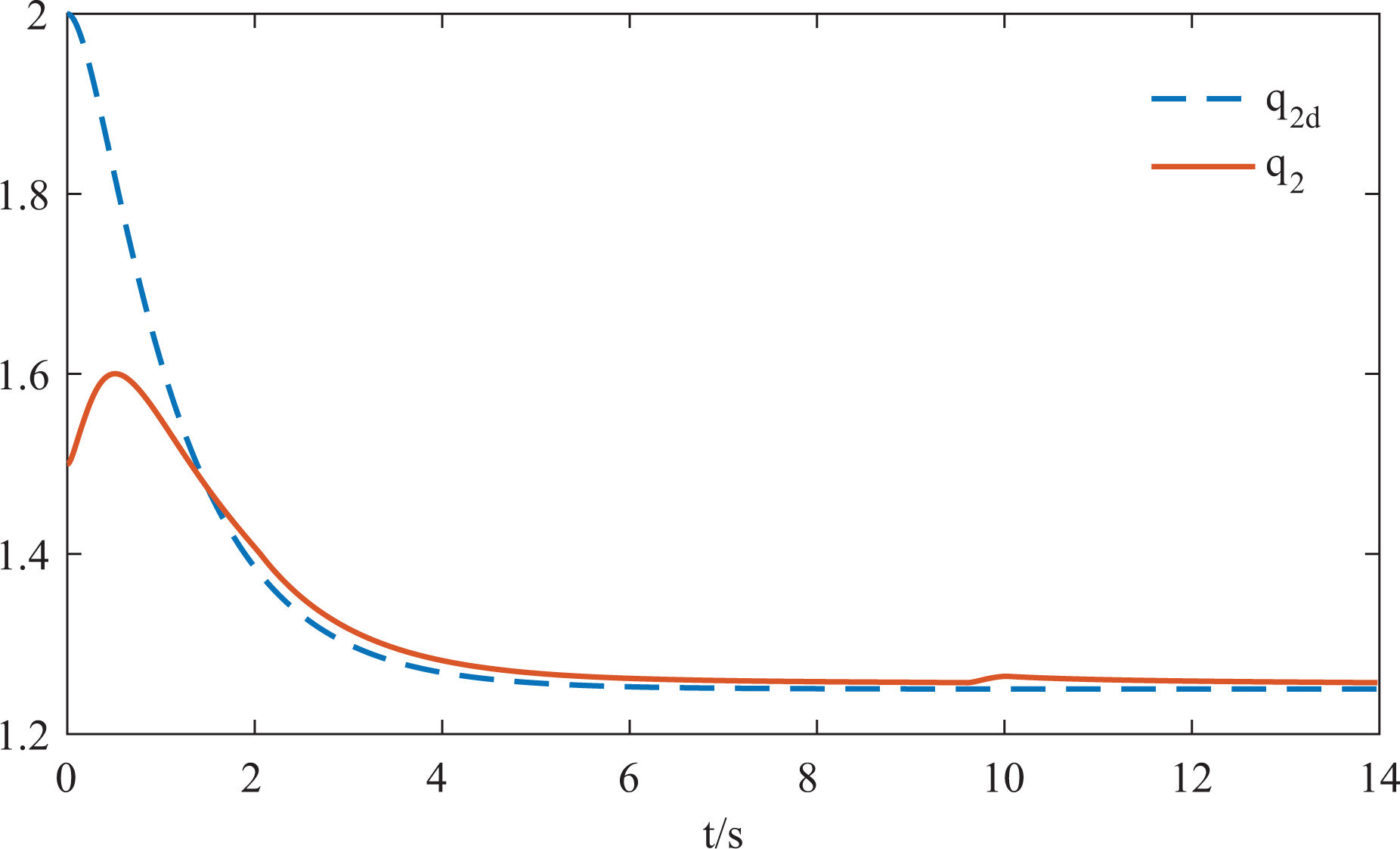
Tracking curves of link 2.

Tracking curves of link 3.

Terminal sliding mode.

Control input signals.

Positive tracking error.
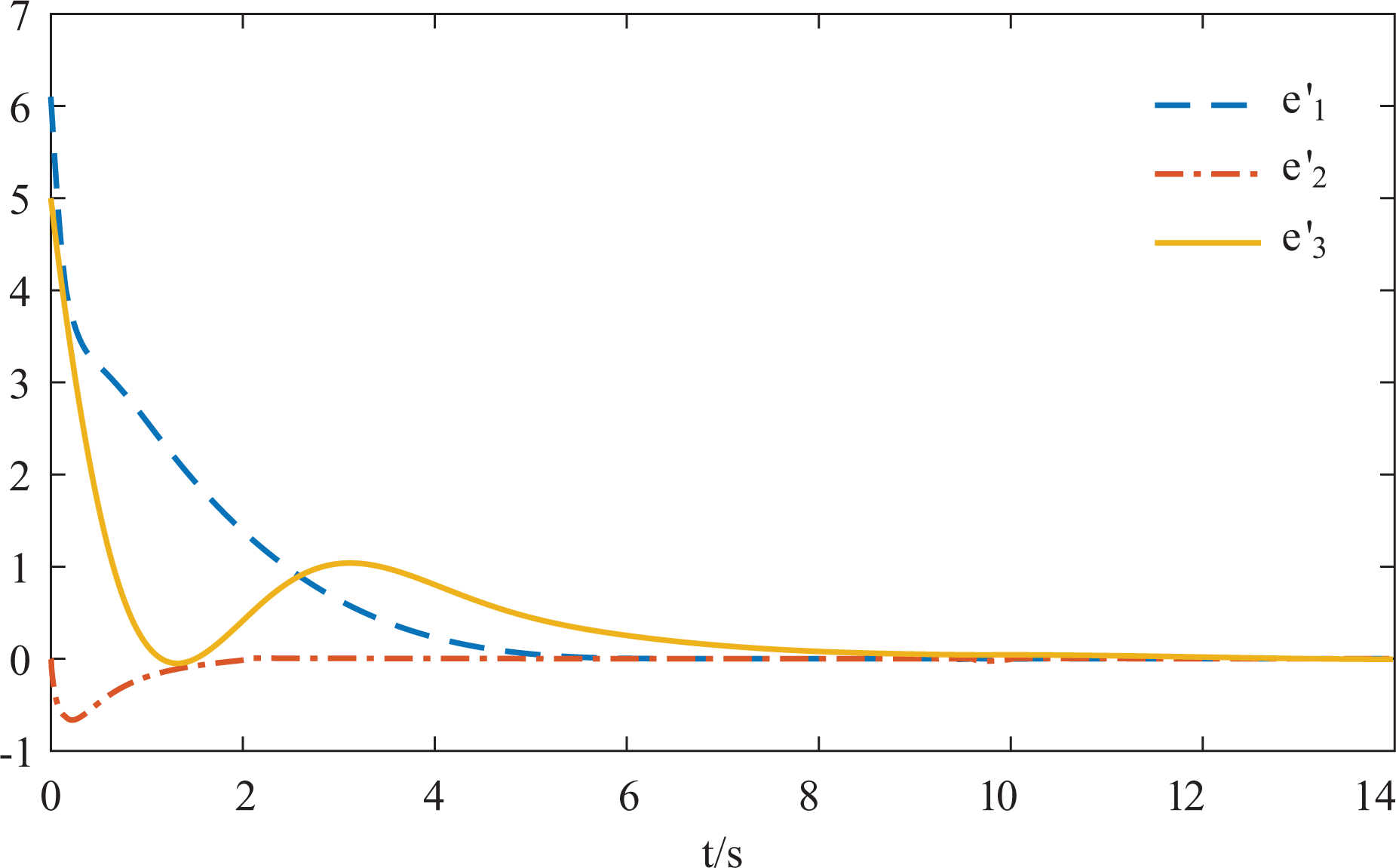
Velocity tracking error.
Conclusion
In this article, we designed an adaptive TSM controller for uncertain spatial robot. A neural networks is given to estimate the uncertain nonlinear functions of systems. Our controller not only guarantee the boundedness of all the signals in the closed-loop system but also ensure the convergence of the tracking errors to zero. The simulation proves the effectiveness of the proposed adaptive TSM control method. This control scheme is also valid to the other nonlinear system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (61967001), the Natural Science Foundation for the Higher Education Institutions of Anhui Province of China (KJ2019A0696 and KJ2018A0470), the Natural Science Foundation of Huainan Normal University (2019XJZD09).