
Abstract
In the article, the consensus problem is considered for networked multi-robot systems, in which the dynamical equation of all robots is non-holonomic and nonlinear systems. In the multi-robot systems, each robot updates its current states and receives the states from the neighboring robots. Under the assumption that if the network graph is bidirectional, a local information-based state feedback robust controller is designed to make sure the convergence of the individual robots’ states to a common value. Finally, the effectiveness of the presented method is illustrated by the simulation results of a group of four mobile robots.
Introduction
In the past few years, distributed control of multi-agent systems has attracted much attention from various research field, such as swarming, cooperative control of spacecraft, autonomous underwater vehicles, mobile robots, flocking of birds, 1 –7 and so on.
In order to ensure the effectiveness of the distributed control strategy, the consensus problem which as the basic problem of distributed cooperative control is firstly considered and has been employed in various engineering application. Consensus algorithms have a historical perspective in literature, 8 –12 to name a few. In general, the multi-agent systems can be separated into two categories: leaderless system and leader–follower system. For leaderless structure system, the consensus problem for a group of high-order integrator agents with fixed topology was studied by Moreau, 13 and a linear distributed consensus protocol was proposed. Similar research can refer to the literature. 14 –17 In the leaderless structure system, although lots of consensus protocols can be designed to the states of system achieve agreement, the expected common values of state convergence are often uncontrollable. The consensus algorithms designed with leader–follower structure can solve these problems efficiently. The states of each individual agent can converge to any desired value or trajectory by preplanning the state of the leader agent. Related studies are available in the literature. 18 –21
In actual control systems, plenty of systems can be transformed into first-order or second-order systems. Such that early research are mainly focused on the consensus seeking problem of low-order multi-agent systems. The consensus protocols of low-order systems with fixed and switching topologies were discussed in literature. 22 –24 Meanwhile, the papers 25 –28 extended the low-order consensus protocols to high-order multi-agent systems.
With the development of the consensus for multi-agent systems, many practical cooperative control systems involve agents that are non-holonomic and nonlinear. The existing results are difficult to apply to multiple non-holonomic systems directly. Motivated by the above analysis, two cooperative controllers were designed for non-holonomic mobile agents in the study by Dong and Farrell, 29 and the result was extended to the case with uncertainty dynamical equation of each agent in the study by Dong and Farrell. 30 Noticed that the controller designed by Dong and Farrell 29,30 are based on Brockett’s stabilization condition, which is more conservative than the state consensus of multi-agent systems.
In the study by Peng et al., 31 the formation control problem of non-holonomic mobile robots systems was studied using the consistency method. The formation control problem of multi-robot system was transformed into the consistency problem of system state, which was proved by graph theory and Lyapunov theory. A distributed consistency protocol for multi-robot system with general linear dynamics and directed communication graph was designed by Li et al., 32 using the minimum nonzero eigenvalue of Laplacian matrix of communication topological graph. However, the consistency protocol designed in the above literature was based on the global states information, with large amount of information, high requirements for the communication load of the system, and slow communication rate between individuals, it is easy to generate communication delay and affect the real-time performance of the robot.
Takes advantage of this, this article focused on the consensus problem in multiple non-holonomic mobile robot systems by local state feedback robust controllers.
In this article, for multiple wheeled mobile robot systems with non-holonomic kinematic equations, considering the existence of input disturbances, the robust consistency control algorithm using local state feedback for multiple individual wheeled mobile robot systems is studied. Firstly, the kinematic model of wheeled mobile robot is transformed into a third-order chain system by coordinate transformation, and the third-order system is regarded as a cascade system composed of the first-order subsystem and the second-order subsystem. Then, for these two subsystems, the terminal sliding mode method is used to deal with the input disturbance, and the robust consistency control algorithm is designed, respectively.
The rest of the article is organized as follows. Some preliminaries are given in the second section. The third section formally states the consensus control problems of multiple non-holonomic mobile robot systems. In the fourth section, the local state feedback control laws are proposed to make sure the systems states achieve agreement. The fifth section includes simulation results to illustrate the effectiveness of the presented method. The sixth section states conclusions related to the analysis of this article.
Preliminaries
Graph
Consider a team of n robots, the information structure of networked multi-robot systems can be represented by a graph
Let

where

and
When the information topological structure of the multi-robot systems is bidirectional, the graph Laplacian matrix L is symmetric and semi-positive definite. Refer to the study by Alexander 33 for more properties of graph Laplacians.
Pseudo-inverse matrix
Given a matrix

where
Problem formulation
In this section, consensus problem of networked multi-robot systems is discussed. Suppose that there are n mobile robots in the team. Each mobile robot in the multi-robot systems is shown in Figure 1.
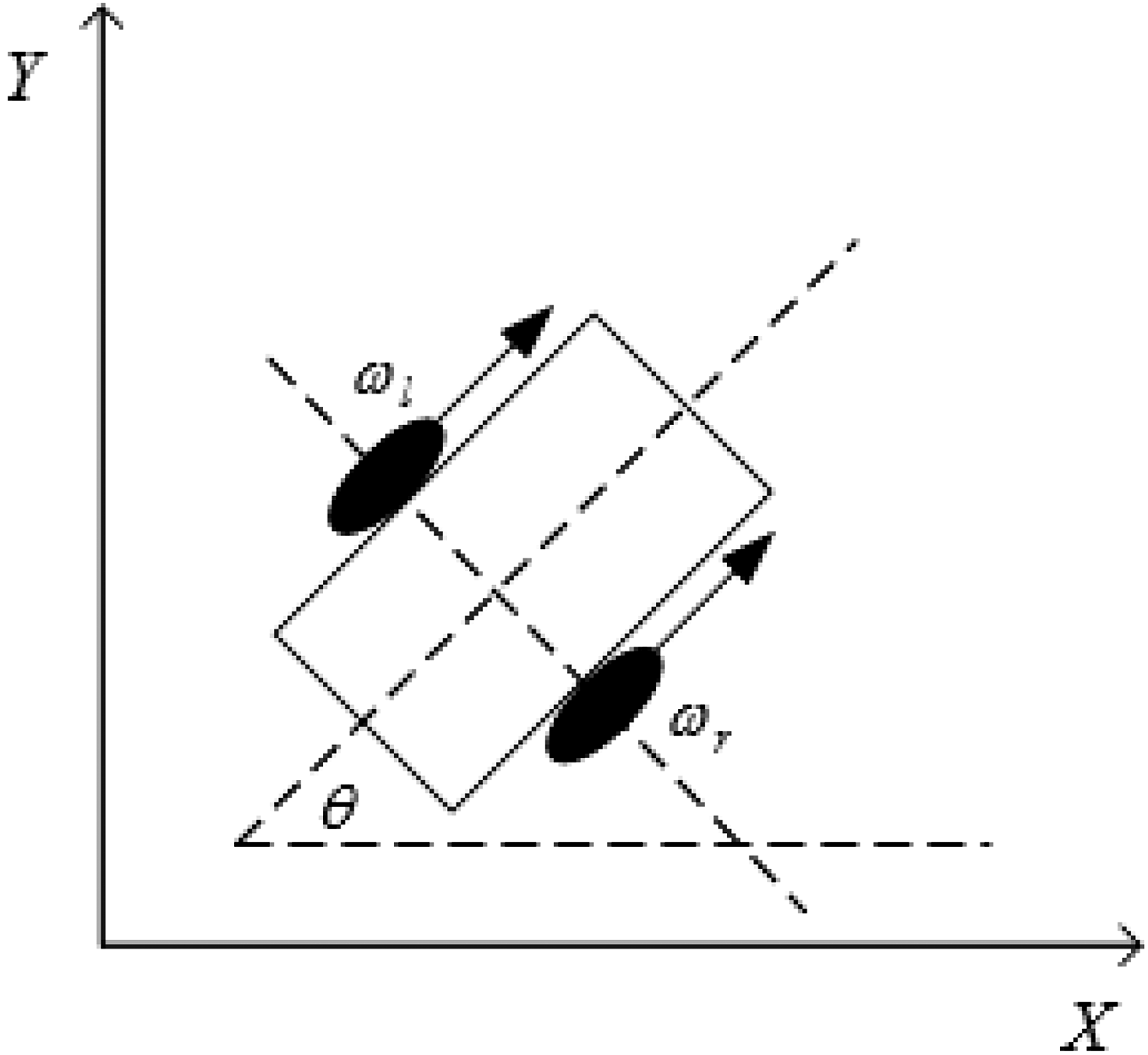
Non-holonomic mobile robot.
The kinematic equations of the ith non-holonomic mobile robot are given by

where
Let

where

In order to facilitate the consensus analysis and design the controller, the system (2) needs to be transformed into canonical form of non-holonomic systems, use the following two transformations


Then, the canonical form of non-holonomic systems can be written as

Then, the consensus seeking problem of the multi-robot systems is stated under the following assumptions. It is assumed that the network graph of the systems is connected and the robots are bidirectional among the team. The control objective is to design a state feedback controller

Controller design
Controller design without disturbance
In this section, the consensus controller is designed to make sure that the non-holonomic robots among the group achieve the common value. The controller of the ith robot is given as
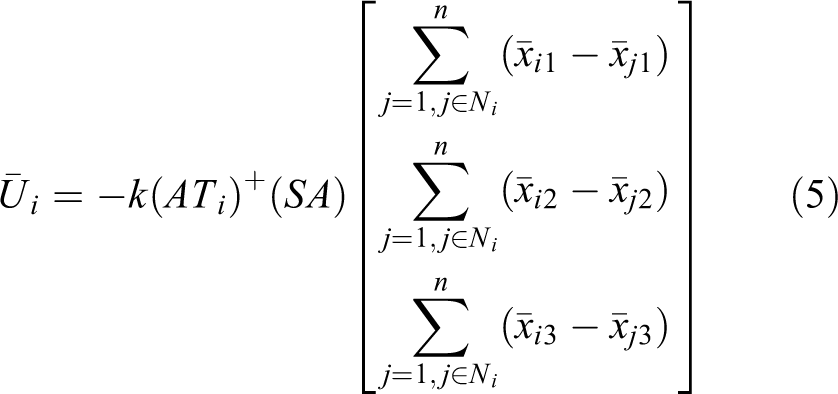

and
The main result is stated as follow based on the state feedback controller (5).
Theorem 1
The multi-robot systems (3) can achieve consensus by using the controller (5) under the assumption of bidirectional communication.
Proof
Choosing the following Lyapunov function

where ⊗ denotes the Kronecker product of two matrices. Since L and


In equation (7),
When

Expanding the above equation, results in



Adding (10) and (11), we have

Then, substitute the above equation into equation (9), we get

For all robots in the team, summing up equation (12), we have

which is equivalent to

Thus, when
Similarly, we can obtain
Controller design under input disturbance
Furthermore, if there are bounded input disturbances in the motion of mobile robot, the kinematic equations of the ith non-holonomic mobile robot (1) can be rewritten as

where
Through a similar transformation, systems (15) can be stated as follow

where
Then, the consensus seeking problem of the multi-robot systems (15) can be stated as follow. The control objective is to design a state feedback controller

In order to facilitate the design of the controller, system (16) can be regarded as a cascade system, which is composed of a first-order subsystem and a second-order subsystem. Firstly, robust consensus control protocol is designed for these two subsystems, and then the final consensus control protocol is designed for the system (16) based on switch strategy.
Firstly, a robust consensus control protocol is designed for the second-order subsystem

Let

The robust consensus control protocol designed for the second-order subsystem is stated as follow.
Theorem 2
For system (19), the robust consensus control protocol is designed as

where
Proof
Choosing the following Lyapunov function
Then, we have

It can be obtained that

It can be proofed

When

Next, we will prove that there are
Firstly, choosing Lyapunov function

where

where

Next,

It can be proofed that
When k
4 was determined, there exits

If

Therefore, under the effect of robust consensus control protocol
Then, a robust consensus control protocol is designed for the first-order subsystem.

The robust consensus control protocol is designed for the first-order subsystem is stated as follow.
Theorem 3
For system (25), the robust consensus control protocol is designed as

where
The proof process is similar to that of theorem 2. Based on theorem 2 and theorem 3, the robust consensus control protocol of system (16) can be stated as follow.
Theorem 4
For the multi-robot system (16), the robust consensus control protocol is designed as


The system (16) can achieve consensus by using the above controller under the assumption of bidirectional communication.
Simulation
Suppose that there are four mobile robots in the team, which is denoted as

Communication graphs among the team of four robots.
The graph Laplacian matrix corresponding to the graph in Figure 1 is

Supposed that the initial states of each mobile robot

The state curve from different initial positions in the x−y plane.

The orientation curve from different initial positions.
Figure 3 illustrates the states curve from different initial positions in the
Next, the consensus problem in the case of disturbance will be verified by simulation. Supposed that the disturbances are
The parameters of controller are set as follow

Figures 5 and 6 illustrate the states curve from different initial positions in the x plane and y plane, respectively. Figure 7 shows the curve of orientation of each robot. It can be seen from Figures 5 to 7 that the states of the multi-robot systems achieve consensus under the local state feedback controller in the case of disturbances.

The state curve from different initial positions in the x plane.

The state curve from different initial positions in the y plane.
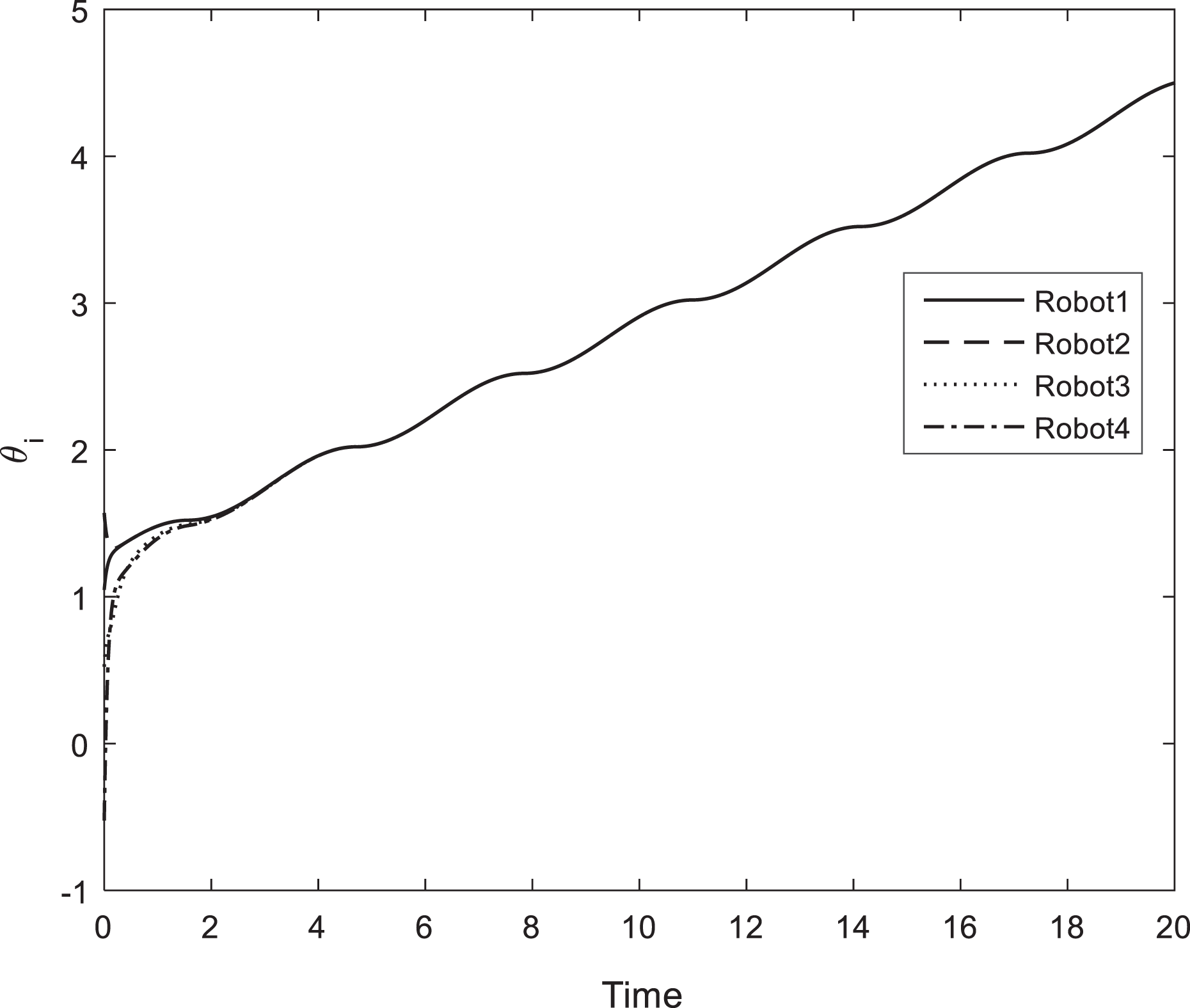
The orientation curve from different initial positions.
Conclusions
In this article, the consensus problem of multiple non-holonomic robot systems was considered. Firstly, the non-holonomic dynamical equations of mobile robots were transformed into canonical form. Then, robust state feedback controllers were designed based on local information under bidirectional communication among the systems. Finally, the effectiveness of the presented method was illustrated by simulation.
With the practical application of multi-robot system, the control performance of multi-robot system requires higher requirements, the following issues need to be studied in depth.
In this article, each robot in the multi-robot system has the same kinematic characteristics. However, due to the uncertain parameters of the physical system or the different requirements of the actual task, it cannot guarantee that the motion characteristics of each robot are exactly the same, that is, heterogeneous multi-robot system. Therefore, how to design the consistency control strategy of heterogeneous multi-robot system has theoretical and practical significance.
Furthermore, in the actual network environment, the communication topology of the multi-robot system will change due to various factors. How to design the consistency control strategy of the multi-robot system under the switching topology is a problem worthy of further study.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Nature Science Foundation under grant 61403124 and supported by the Fundamental Research Funds for the Henan Provincial Colleges and Universities in Henan University of Technology under grant 2017QNJH32.